
Virtual Reality Controller with Directed Haptic Feedback to Increase
Immersion
Tobias Hermann
∗ a
, Andreas Burkard
∗ b
and Stefan Radicke
c
Hochschule der Medien, Nobelstraße 10, Stuttgart, Germany
Keywords:
Haptic Feedback, Virtual Reality, Input Device, Gaming.
Abstract:
In the context of this paper we propose the Directed Feedback Controller (DFC). This is a prototype controller,
which is able to generate haptic feedback from all directions. Its purpose is to increase the immersion in Virtual
Reality (VR) games. A user study has shown that the current prototype is perceived as very innovative. The
participants enjoyed the experience and would tell their friends about it. In addition, most of the respondents
see great potential in the idea behind the DFC. However, the DFC still has some minor issues. For example,
due to the high weight of the DFC, the participants could not always determine the exact direction of the
impact. Therefore, several ideas for weight reduction are proposed at the end of this paper.
1 INTRODUCTION
In recent years, the demand for Virtual Reality (VR)
technologies has increased continuously. Wearing
a Head Mounted Display (HMD) takes the user to
another world but discrepancies between the experi-
enced and the real world can quickly break this im-
mersion.
As Hunter G. Hoffman shows in his paper, it tears
the user out of the immersion of the Virtual Envi-
ronments (VE) when he reaches through virtual ob-
jects with his cyber hand and receives no feedback
(Hoffman, 1998). We assume that the same applies to
touching objects with a tool in a VE even if the motion
control gives some feedback through vibration.
Sensory modalities such as vision and audition
are already basic requirements of VEs (Bowman and
McMahan, 2007). However, haptics such as force
feedback are relatively underrepresented and unex-
plored in the gaming industry, even though there is
a lot of research on it within papers. Although it
has already been shown that force feedback increases
the user experience of the application as well as real-
ism and immersion (Srinivasan and Basdogan, 1997;
MacLean, 2000).
Even a comparatively weak feedback already adds
a lot to the immersion for the user (Orozco et al.,
a
https://orcid.org/0000-0003-2481-4204
b
https://orcid.org/0000-0002-9131-5897
c
https://orcid.org/0000-0002-5491-345X
∗
Both authors contributed equally to this research.
2012). Our goal was to generate a strong feedback
that really feels like hitting an object, blocking an at-
tack, or perceiving the recoil of firing a weapon. That
formed the motivation to create this prototype of our
haptic feedback controller called ”Directed Feedback
Controller” (DFC). The DFC is able to generate feed-
back from any direction, depending on the colliding
object in the virtual world.
The DFC is primarily designed to simulate heavy
melee and ranged weapons immersively in the VE of
action-packed video games. Another possible appli-
cation for DFC is the simulation of tools inside and
outside games.
We have chosen directional feedback because in
reality you can also feel from which direction a col-
lision with another object or a recoil is generated.
In theory, this should increase the sense of immer-
sion. Also on a gameplay level, this mechanism of-
fers possibilities for new game concepts as an addi-
tional source of information, such as a magic tool that
guides the way based on the direction of the feedback.
In this paper, we first describe how the DFC works
and how it is constructed. Then we present the results
of the user test we conducted with a tech demo to in-
vestigate the effects of the DFC on the VR experience.
2 RELATED WORK
The DFC is inspired by technology, which utilizes
haptic feedback for VR applications.
Hermann, T., Burkard, A. and Radicke, S.
Virtual Reality Controller with Directed Haptic Feedback to Increase Immersion.
DOI: 10.5220/0009098302030210
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 2: HUCAPP, pages
203-210
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
203

2.1 Feedback Controllers for Static or
Slowly Moving Objects
The VRHapticDrones are quadcopters, which act as
levitating haptic feedback proxies and are seen as
movable objects in the VR space (Hoppe et al., 2018).
A very unique concept and usage of haptic feed-
back are the Haptic Links (Strasnick et al., 2018).
They are used as connection between two handheld
controllers, which are able to change their stiffness to
simulate different objects like for example a rifle or
two onehanded weapons.
Wolverine (Choi and Follmer, 2016) is a wearable
mobile haptic device, which simulates the grasping of
rigid objects in VR. The force feedback is created by
constant stiffness executed with an exoskeleton struc-
ture.
Another approach of using haptic feedback is for
social interactions like touching another person inside
the VE (Boucaud et al., 2019). This work describes
an experiment, which utilizes an interface consisting
of two devices, a sleeve and a glove equipped with
several vibrators, such as those integrated in smart-
phones. The idea is to transmit emotions. By touch-
ing the virtual avatar of another user, a signal is sent
to that user, which generates haptic feedback on both
ends. During the experiment, the second actor is con-
trolled by a simple artificial intelligence (AI). The
emotions that should be recognized by touch patterns
of duration and intensity are: sympathy, anger and
sadness.
NormalTouch and TextureTouch are hand-held
controllers, which generate feedback via physical dis-
placement (Benko et al., 2016).
The concept of Thor’s Hammer is comparable to
that of the DFC because it is able to generate haptic
feedback from multiple directions and has a similar
shape since the part with the feedback mechanisms is
on top of a handle (Heo et al., 2018). The difference
however is that Thor’s Hammer uses six propellers,
each driven by a motor and designed for continuous
contact instead of short strong impulses like the DFC.
The reason why Thor’s Hammer is less suitable for
fast applications is the latency problems that users had
noticed in the user test for a specific use case.
Altogether it can be said, that the main focus of
these inventions is to feel haptic feedback of static or
slowly moving objects. These are barley suitable for
fast paced action driven games. While these types of
games are the unique selling point of the DFC.
2.2 Feedback Controllers Suitable for
Action Driven Games
Nevertheless, there are a few other feedback devices
that are also suitable for action games.
The Haptic Vest is a haptic feedback device in-
tegrated into a vest. With this vest, the user wears
several vibrotactile and thermal actuators at different
parts of the body (Garc
´
ıa-Valle et al., 2017). In their
use case, a train station was simulated where the par-
ticipants can interact with different objects through
which the user perceives tactile interactions. After a
certain time, a fire breaks out in the simulation. If the
participant approaches the fire in the virtual world the
vest increases the temperature via the thermal actua-
tors. Because the vest affects only the torso instead
of being a handheld controller, it has a different focus
compared to the DFC. To further increase the immer-
sion, the Haptic Vest would be a perfect addition to
the DFC.
Aero-plane is a handheld haptic feedback device
as well (Je et al., 2019). It utilizes two mineature jet-
propellers to simulate weighted objects moving on a
2D plane. In reality, the plane is just an illusion based
on the modulation of speed of the two propellers and
the usage of the users wrist as pivot point. Despite
its main focus, it is also capable for the use in action
games like for example burst fire.
The PaCaPa (Sun et al., 2019) simulates a tool in
the hand such as a stick. When the tool collides with
an object in virtual reality, PaCaPa generates haptic
feedback by changing its shape by opening or closing
two movable wing parts. How far these wings open or
close depends on the angle of the collision. Although
it feels realistic and users could even distinguish the
strength of an object, this prototype only works for
one direction as opposed to the DFC.
In this sense, the HaptiVec (Chen et al., 2019) is
probably currently the most similar invention to the
DFC. Just like the DFC, it can be used in action games
and is able to generate feedback from eight different
directions. The HaptiVec is presented as two custom
VR controllers, each containing a 3x5 tactile pin array
in their handles. The pins of this array can go in and
out to give users local pressure sensations depending
on the directional signal given from the application.
Although the HaptiVec contributes to immersion and
helps the user to understand the environment better,
it is clear to the user that it is still a controller, while
the purpose of the DFC is to really feel like a weighty
item, such as a weapon in the user’s immersion. The
feedback from the HaptiVec is meant to represent the
whole body, e.g. it indicates the direction the user was
hit by or raindrops that rattle down on the user. In con-
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
204

trast the DFC only gives feedback when the item in
the hand of the user hits something or when recoil oc-
curs. Noteworthy, the impact of the DFC’s feedback
is also stronger.
Due to its high weight and strong feedback, the
DFC, unlike the other devices listed, feels less like a
controller and more like a weighty object or a close
combat or ranged weapon, which results in increased
immersion.
3 DESIGN AND
IMPLEMENTATION
3.1 Requirements and Constraints
The motivation behind the DFC is to develop a con-
troller that enhances the gameplay feel and immersion
of using a weapon in VR through a clearly percepti-
ble feedback. The goal of the DFC is to allow users
to feel from which direction the feedback is gener-
ated, both as a source of information and to simu-
late recoil or collision with other objects. The main
focus of the DFC is the generation of strong short
feedback pulses, therefore continuous feedback can-
not be simulated with it. In contrast to ordinary VR
controllers, the DFC has only one button, which sim-
ulates for example the trigger of a pistol. The reason
for the lack of many buttons is that when the user uses
the DFC, he should not have the feeling of holding a
controller in his hand, rather a real weapon or tool,
which should enhance the sense of immersion. While
ordinary VR controllers mostly rely on haptic feed-
back in the form of vibrotactile actuators, the DFC
contains its own mechanism for generating feedback,
which will be explained in the following sections.
Both the ordinary VR controller and the DFC are
not able to track the arm position of the user, so they
cannot be displayed correctly in the VE, which coun-
teracts the sense of immersion.
The weight of the controller is about 1500 g,
which consists of: 110 g per coil, 20 g per plug and
25 g per iron bolt. The sum of these individual parts
is multiplied by 6, since there are two of these parts
per tube and there are three tubes. This adds up to 930
g. In addition there is a 90 g tracking device and the
rest is the casing with 470 g.
The total costs for the proposed DFC prototype
amounted to be about 250 euros.
3.2 Controller Basics
The DFC contains three tubes wrapped with copper
wire at the two opposite ends of the tube, each re-
Figure 1: Feedback generation inside a single tube. (A) No
electricity given, the initial situation of the tube. (B) When
electricity is applied, the copper wire of one of the two coils
becomes a magnet for a short duration (which copper wire
coil is addressed depends on the incoming signal) and pulls
the nearest iron bolt through it. The steel spring slows the
bolt down and pushes it back to its starting position. The
initial situation (A) is restituted again.
sulting in a copper wire coil. Each tube contains two
iron bolts and one steel spring. Due to the insertion of
electricity, one of the two copper wire coils of one or
more of these tubes becomes magnetic and pulls the
nearest iron bolt with its magneticity through it. That
jolt generates the haptic feedback. The steel spring
slows down the iron bolt and then pushes it back to its
start position like shown in Figure 1.
We attached a tracking device to the controller to
track its position and rotation data. The DFC includes
a micro controller which communicates via the Uni-
versal Asynchronous Receiver Transmitter (UART)
with the computer (Osborne, 1980; Nanda and Pat-
tnaik, 2016).
3.3 Previous Iterations and Alternative
Design Approaches
The first prototype of the DFC was pistol-shaped and
had only one feedback direction. Since we already
had the idea of generating feedback from different di-
rections, this iteration was only there to test the mech-
anism with the acceleration of the iron bolt by a mag-
netic copper wire coil. We were satisfied with the gen-
erated recoil. The second iteration already contained
the directed feedback and had the form of a box, to
which two tubes per axis for two opposite directions
were attached. These contained the iron bolts and the
copper wire coils. The prototype was placed on the
arm joint and it was held by a handle, but the high
Virtual Reality Controller with Directed Haptic Feedback to Increase Immersion
205
weight was uncomfortable for the arm joint and the
prototype itself was not really stable. Our second pro-
totype was overall even heavier than the current itera-
tion of the prototype because it used six tubes instead
of only three. Each tube contained only one iron bolt
and one copper wire coil instead of two as in the cur-
rent prototype, so one tube could only provide feed-
back in one direction and not both directions as in our
current version. Furthermore, the tubes were not or-
thogonally arranged, but directed to the axis system,
two on each axis for the back and forth direction. This
led us to the final design of our current prototype, as
described in the following section.
3.4 Design
The casing and handle of the controller were printed
with a 3D printer. The design of the handle is based
on conventional VR controllers and is equipped with
a button that can be used to send a signal to the com-
puter. Inside the casing are three orthogonal tubes,
each of them is equipped with two coils, an iron bolt
and two springs, as depicted in Figure 2. The shape of
the casing results from the orthogonality and symmet-
rical distribution of the axes and the goal of bringing
the center of gravity of the controller as close as pos-
sible to the user’s hand in order to minimize leverage
and imbalance while moving the controller. Based
on these requirements, the first design looked like a
sphere. In order to reduce the weight of the casing,
we then left out material that was not necessary for
stability. The orthogonal alignment of the three axes
makes it possible to generate feedback from any di-
rection by combining the pulses.
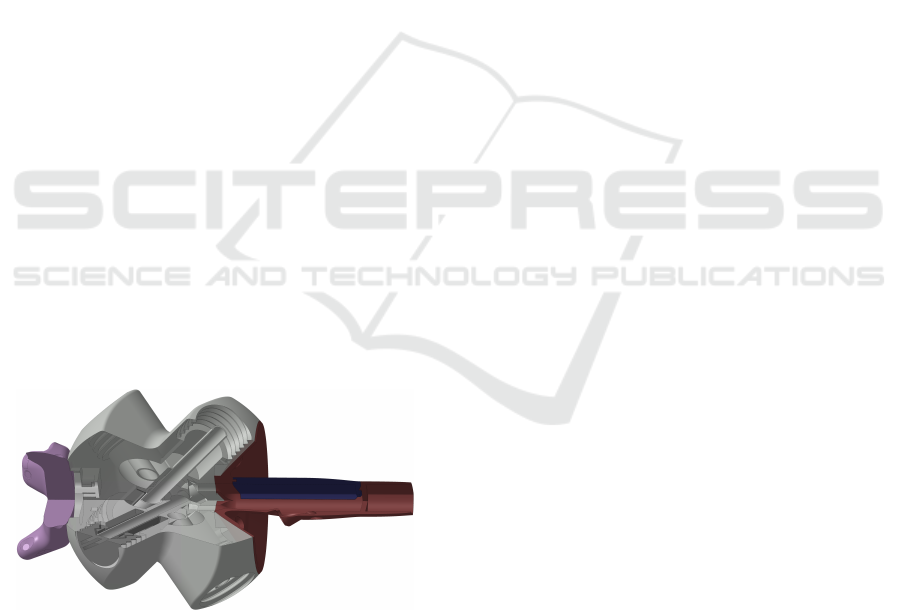
Figure 2: Directed Feedback Controller. This Computer
Aided Design (CAD) model of DFC casing shows the in-
side of the DFC. The violet part represents the tracking de-
vice attached to the controller. The grey part represents the
casing with the three orthogonal tubes, which contain the
iron bolts and springs. The red part is the handle, which
contains the cables and a button. The casing and the handle
are 3d printed.
4 EXPERIMENT
4.1 Tech Demo
To showcase the functionality of the DFC and to make
it testable for the user study, we created a game as tech
demo. The game is a basic First Person Shooter (FPS)
where the user has to fight waves of enemies with dif-
ferent weapons. The weapons in the game have been
designed to optimally showcase the capabilities of the
controller:
• The melee weapon is a sword, which utilizes the
directional features of the DFC the most. Depend-
ing on which side of the weapon hits the enemy,
feedback is generated from the opposite side.
• The grenade launcher utilizes only the front direc-
tion of the DFC to simulate the weapon recoil.
• The disc thrower releases the mounts at the left
and the right side of a spinning disk, which results
in feedback from both sides and then the disc is
shot afterwards, which results in a feedback from
the front side.
• The shield can block projectiles and melee at-
tacks. The feedback is generated from the angle
of the attack.
• The grappling hook is the weapon, which enables
the user to move around the map. If shot, the user
feels a feedback from the backside at first because
of the releasing bowstring and frontal afterwards
when she is pulled to the target.
4.2 User Study Setup
We conducted tests with 22 participants over the
course of two days. 82% of these participants have
played VR games already. 57% played a lot of
videogames, 24% sometimes and 19% rarely or never.
The age distribution was as follows: 77% were 15-29
years old and 23% were 30-44 years old. Every par-
ticipant played for about 10-15 minutes including four
waves of enemies and a tutorial for the game. After
the play session, they had to fill in two surveys about
the controller and the game. One survey containing
ratings on a Likert scale (Likert, 1932), closed-ended
and open-ended questions and an AttrakDiff survey
(Hassenzahl et al., 2003). The time how long ev-
ery participant used every weapon was tracked in the
background by the game itself.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
206
5 EVALUATION
After analyzing all the data we collected from our user
study we obtained the following results.
5.1 Weight of the Controller
95% of the participants answered the question consid-
ering the weight of the controller on a scale from too
light (1) to unbearably heavy (4) with the controller is
too heavy (3). The result indicates that the weight of
the DFC should be reduced in future iterations.
5.2 Determination of the Feedback
Direction
As the survey shows, only 23% of the participants
were able to determine the feedback direction. The
reason for this is that the proportion of the weight of
the iron bolt in the total weight of the controller is
only about 1.8%. Even with three times as heavy iron
bolts, we would only achieve a share of 4.4% of the
total weight of the controller and thereby increase the
total weight from 1400 g to 1700 g. In conclusion
either the total weight of the controller has to be re-
duced or the weight distribution has to be optimized.
5.3 Immersion
The question whether the feedback feels realistic was
answered with yes only by 45% of the participants.
On the other hand 77% of the participants answered
yes to the question whether the feedback added to
the immersion. The conclusion is that even when the
feedback does not feel realistic, the mere existence of
stronger and directed feedback adds a lot to the im-
mersion of the game.
In the open-ended questions section of the first
questionnaire, one of the participants said: ”I think
the combination is really great, it felt real while play-
ing” and another: ”The controller contributed to bet-
ter immersion due to its heavy weight. Even though
it is exhausting to hold such a heavy controller in the
long run, it reflected the weight of the weapon well”.
One participant also said ”Very good / realistic feed-
back - fits very well in combination with the game”.
According to the comments of these participants, the
controller helped them to feel more immersed in the
game world.
5.4 Potential and Entertainment Value
On a scale from not entertained (1) to very enter-
tained (4) 91% of the participants felt very enter-
tained (4) and only 9% somewhat entertained (3). We
had previously told participants that the questions in
this first questionnaire were all related to the con-
troller and not to the game, unless otherwise speci-
fied. If you add the results of the AttrakDiff survey
(Hassenzahl et al., 2003) into the equation, one could
argue that the controller is the main reason for the pos-
itive entertainment rating. On a scale from no poten-
tial (1) to big potential (4), 73% of the participants
answered that there is a big potential (4) and 27%
that there is some potential (3) behind the controller
if it would be developed further. That tells us that the
prototype itself is not perfect but the idea of a feed-
back controller is worth further developing. 64% of
the participants answered the question, whether they
would tell their friends about our project on a scale
from never (1) to in any case (4), with in any case
(4). 36% would probably tell their friends (3).
5.5 Design Evaluation
The question considering the design of the controller
from a scale of the controller seems unprofessional (1)
to the controller seems professional (4), 18% of the
participants answered that the controller seems pro-
fessional (4), 68% that it seems solid (3) and 14% that
the controllers seems a little improvised (2). Accord-
ing to the survey, only 27% of the participants were
bothered by the cables, but during the user tests we
made sure the cables did not disturb the participants
by holding them up ourselves, thus keeping them out
of the way. Although we think it would still make
sense to find a wireless solution.
5.6 Weapons
The participants were asked in the survey, how much
they liked every single weapon from a scale between
Figure 3: Weapon usage diagram. The y-axis represents
the percentage how long the participants used each weapon
(x-axis) in correlation to the other weapons.
Virtual Reality Controller with Directed Haptic Feedback to Increase Immersion
207
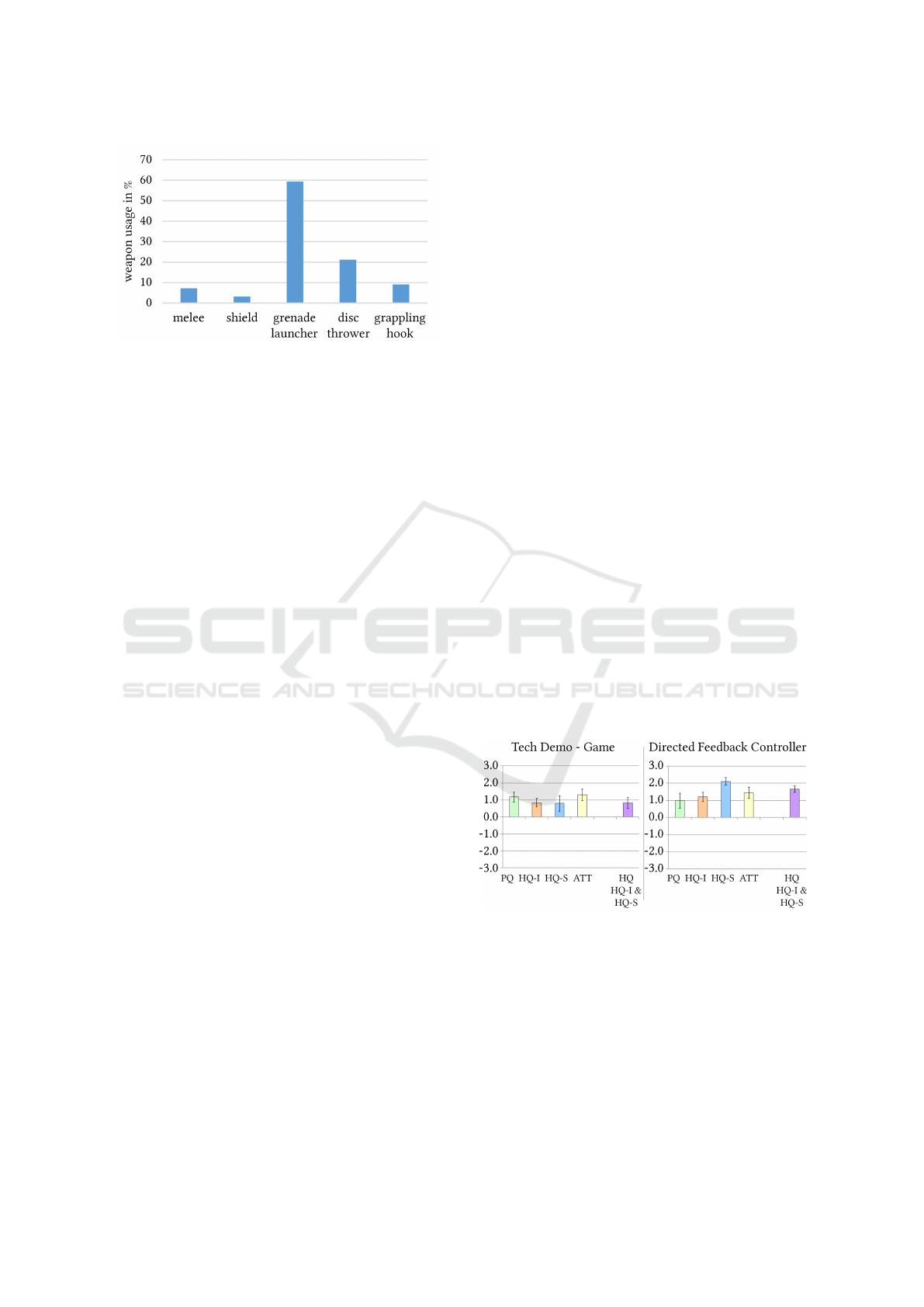
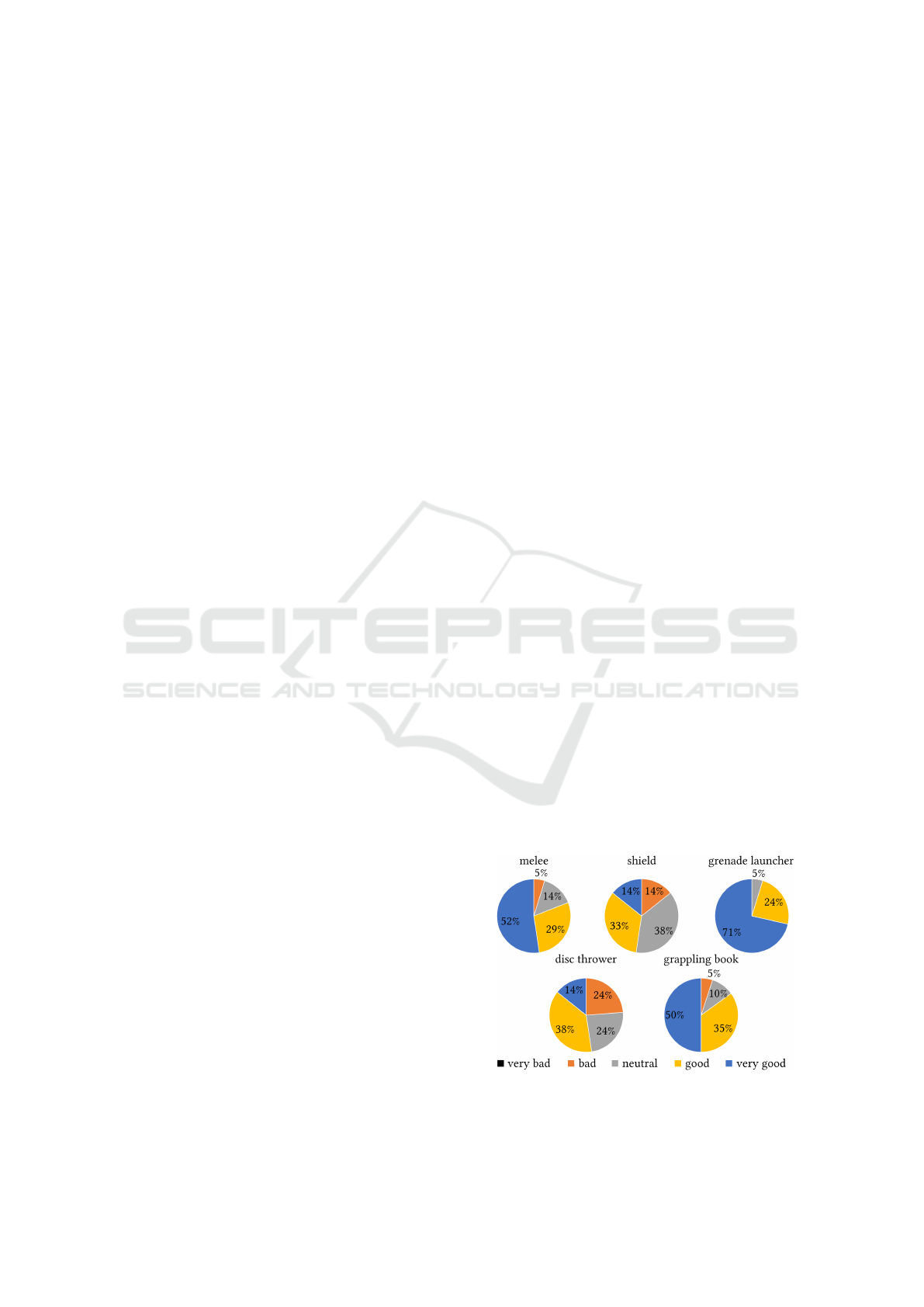
Figure 4: Weapon rating pie charts. Every pie chart repre-
sents one of the five weapons and the percentages of how
much the participants liked the individual weapons on a
scale from very bad (1) to very good (5).
very bad (1) and very good (5) like depicted in Fig-
ure 3. At this point, we want to compare it with
the tracked time how long they used the different
weapons. The tracking of the weapons usage started
after the tutorial and is showcased as percent usage
compared to the other weapons, see Figure 4.
This is interesting for us because how much a
weapon utilizes the feedback varies between each
weapon. A disconnect between the usage time and
the weapon rating is noticeable at the melee weapon
because the rating is good but the usage is poor. The
melee weapon is the weapon, which makes the most
use of the directional feedback. We conclude from
these results that the melee weapon is fun because of
the feedback you can feel when hitting enemies but
not effective in the context of our game.
The melee weapon is inefficient because all enemy
types except one are ranged and sometimes you can’t
reach them because of the limited range of movement
in the VR area.
5.7 AttrakDiff Survey
In Addition to the other survey questions, we made
use of the AttrakDiff method (Hassenzahl et al.,
2003).
AttrakDiff is an evaluation technique that focuses
on the usability of a product, but at the same time of-
fers a wide range of questions that leave much room
for interpretation. Especially since users have to eval-
uate what they perceive in different areas, it can also
be used to draw conclusions about the feeling of im-
mersion. Through the experience of testing our ear-
lier iteration of the prototype, we have found that At-
trakDiff is a suitable method to evaluate the quality
and novelty of a product.
The participants had to answer the same questions
for our tech demo and the controller separately:
• Game as a Tech Demo - The game was perceived
as attractive and practical. Furthermore the hedo-
nic qualities were also rated positively as depicted
in Figure 5. Due to the game being in VR, it was
evaluated as insulating and compared to the con-
troller rather conventional and conservative.
• Directed Feedback Controller - The controller
achieved very high scores in the areas of nov-
elty, innovation and all other areas except the
”technical/human” category as shown in Figure
5. Whereas according to our opinion the techni-
cal aspect of the controller is not negative because
it is supposed to be a technical device. The fact
that almost all areas of the pragmatic quality of
the controller has reached such positive values is
important because interaction with virtual reality,
which feels awkward, could drastically reduce the
feeling of immersion (Witmer and Singer, 1998).
Since isolation of the physical environment is also
one of the prerequisites for immersion, it is pos-
itive to note that the categories ”isolating - con-
necting” and ”separating me from people - bring-
ing me closer” are low compared to most of the
other values. However, we would have expected
these to be even in the negative range. The high
values in the area of ”hedonic quality - stimula-
tion” lead to the fact that due to the novelty of the
controller the player is fully focused on the novel
tasks, which also supports the feeling of immer-
sion by not paying so much attention to his envi-
ronment at least as long as the feeling of novelty
lasts.
Figure 5: AttrakDiff diagram for the tech demo on the left
and for the Directed Feedback Controller on the right. The
values of the y-axis represent averages (mean with standard
deviation) for the item groups of the x-axis considering the
categories: pragmatic quality (PQ), HQ-I: hedonic quality
(identification), HQ-S: hedonic quality (stimulation). The
higher the value the better.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
208

6 DISCUSSION
Expertise, gender, age and VR and gaming experience
did not seem to have had any discernible influence on
the users’ results.
6.1 Weight Reduction
Although the heavy weight makes the DFC feel more
immersive when simulating heavy weapons or tools,
the weight is too high for longer game sessions, which
can be tiring for the arm.
With 660 g, the coils make up almost half of
the weight of the controller. However, lighter coils
would only be possible with fewer windings or thin-
ner wire. If you look at the formula for the magnetic
field strength, which is decisive for the strength of the
generated impulse, you can see that both measures to
reduce the weight of the coil would lead to a weaker
magnetic field.
H =
I ∗n
√
l
2
+ D
2
(1)
In our case l is the length of the coil and D its di-
ameter. The lower number of windings n has a direct
effect on the magnetic field strength. A thinner wire
on the other hand, would not be strong enough and
would thus have an indirect effect on the magnetic
field strength, since the amperage I would have to be
reduced.
At about 470 g, the casing accounts for a third of
the total weight. Especially for the screw caps and
the transition from handle to main-body, as shown in
Figure 2, a certain stability has to be guaranteed to
withstand the impacts of the bolts and the movements
of the user. Therefore, not much weight can be saved
on the casing anymore. However, a different shape of
the controller could optimize the weight distribution
so that it feels lighter despite having the same weight.
Another 10% of the weight is contributed by the
iron bolts, which are to be accelerated by the coils.
Lighter bolts are accelerated faster in the magnetic
field than heavier ones. The kinetic energy is there-
fore the same as with the heavier but slower bolts.
Nevertheless, a lighter bolt will lead to a weaker re-
sult, because the proportion of the weight of the bolt
to the total weight of the controller is decisive for the
perceived impact.
The most effective way to save weight is to reduce
the number of axes. One way to reduce the number of
axes and to be still able to cover all directions would
be the construction of two interlocking bearings with
one axis in its center. The bearings could be moved
separately by two small stepper motors and the axis
could thus be brought into the correct position. The
question remains open whether the rotation would be
fast enough to avoid too much delay between the trig-
gering event and the generation of the impact. But
with good game design you can create enough time
for these rotations. Using our tech demo as an ex-
ample, you could do this rotation during the time of
changing weapons.
6.2 Future Work and Limitations
As a next step, we would create another prototype
where the weight is reduced and the tubes are repo-
sitioned so that the direction of the feedback can be
recognized better. Because at the current state of the
prototype, it could be argued that directed feedback
does not have enough advantages over normal feed-
back, as so far only 23% of the participants could
identify the direction of the feedback. However, we
are convinced that this value could be drastically in-
creased with some improvements, as the user test also
showed that 73% of the participants see great poten-
tial and 27% some potential in the controller concept.
Afterwards, we would also conduct another user test
testing the same application with a plain controller
that only has the standard vibration or no feedback
integrated, one of the other experimental feedback
controllers listed in Related Work and the DFC. This
could prove that directed feedback contributes even
more to immersion than normal feedback.
7 CONCLUSION
The results of our project and user tests are that there
are still some issues with the DFC. The main issues
are that the controller is too heavy even for a short
play duration like 10-15 minutes and that the direction
of the feedback is barley determinable.
On the other hand, the feedback from the user tests
about the idea itself and the innovation behind it and
the experience was very positive. With a few more
tweaks, it has potential to become something worth
buying and a promising tool to increase the immersion
in VR games.
ACKNOWLEDGEMENTS
We would like to thank the friendly staff of the
”Hochschule der Medien”, who provided us with
equipment and also supported us with organizational
matters, especially Robin Schulte and Beate Schlitter.
We would also like to thank all participants who took
Virtual Reality Controller with Directed Haptic Feedback to Increase Immersion
209

part in our user tests, as well as our friend Philipp
Pferdt for his technical advice and for helping us with
3D printing.
REFERENCES
Benko, H., Holz, C., Sinclair, M., and Ofek, E. (2016).
Normaltouch and texturetouch: High-fidelity 3d hap-
tic shape rendering on handheld virtual reality con-
trollers. In Proceedings of the 29th Annual Symposium
on User Interface Software and Technology, pages
717–728. ACM.
Boucaud, F., Tafiani, Q., Pelachaud, C., and Thouvenin, I.
(2019). Social touch in human-agent interactions in
an immersive virtual environment. In Proceedings of
the 14th International Joint Conference on Computer
Vision, Imaging and Computer Graphics Theory and
Applications, Volume 2: HUCAPP, pages 129–136.
SciTePress.
Bowman, D. A. and McMahan, R. P. (2007). Virtual re-
ality: how much immersion is enough? Computer,
40(7):36–43.
Chen, D. K., Chossat, J.-B., and Shull, P. B. (2019). Hap-
tivec: Presenting haptic feedback vectors in handheld
controllers using embedded tactile pin arrays. In Pro-
ceedings of the 2019 CHI Conference on Human Fac-
tors in Computing Systems, page 171. ACM.
Choi, I. and Follmer, S. (2016). Wolverine: A wearable hap-
tic interface for grasping in vr. In Proceedings of the
29th Annual Symposium on User Interface Software
and Technology, pages 117–119. ACM.
Garc
´
ıa-Valle, G., Ferre, M., Bre
˜
nosa, J., and Vargas, D.
(2017). Evaluation of presence in virtual environ-
ments: Haptic vest and user’s haptic skills. IEEE Ac-
cess, 6:7224–7233.
Hassenzahl, M., Burmester, M., and Koller, F.
(2003). Attrakdiff: Ein fragebogen zur messung
wahrgenommener hedonischer und pragmatischer
qualit
¨
at. In Mensch & computer 2003, pages 187–196.
Springer.
Heo, S., Chung, C., Lee, G., and Wigdor, D. (2018). Thor’s
hammer: An ungrounded force feedback device uti-
lizing propeller-induced propulsive force. In Proceed-
ings of the 2018 CHI Conference on Human Factors
in Computing Systems, page 525. ACM.
Hoffman, H. G. (1998). Physically touching virtual ob-
jects using tactile augmentation enhances the realism
of virtual environments. In Proceedings. IEEE 1998
Virtual Reality Annual International Symposium (Cat.
No. 98CB36180), pages 59–63. IEEE.
Hoppe, M., Knierim, P., Kosch, T., Funk, M., Futami,
L., Schneegass, S., Henze, N., Schmidt, A., and
Machulla, T. (2018). Vrhapticdrones: Providing hap-
tics in virtual reality through quadcopters. In Proceed-
ings of the 17th International Conference on Mobile
and Ubiquitous Multimedia, pages 7–18. ACM.
Je, S., Kim, M. J., Lee, W., Lee, B., Yang, X.-D., Lopes,
P., and Bianchi, A. (2019). Aero-plane: A handheld
force-feedback device that renders weight motion illu-
sion on a virtual 2d plane. In Proceedings of the 32nd
Annual ACM Symposium on User Interface Software
and Technology, pages 763–775. ACM.
Likert, R. (1932). A technique for the measurement of atti-
tudes. Archives of psychology.
MacLean, K. E. (2000). Designing with haptic feed-
back. In Proceedings 2000 ICRA. Millennium Con-
ference. IEEE International Conference on Robotics
and Automation. Symposia Proceedings (Cat. No.
00CH37065), volume 1, pages 783–788. IEEE.
Nanda, U. and Pattnaik, S. K. (2016). Universal asyn-
chronous receiver and transmitter (uart). In 2016 3rd
International Conference on Advanced Computing
and Communication Systems (ICACCS), volume 1,
pages 1–5. IEEE.
Orozco, M., Silva, J., El Saddik, A., and Petriu, E. (2012).
The role of haptics in games. In Haptics rendering
and applications. IntechOpen.
Osborne, A. (1980). An Introduction to Microcomputers
Volume 1: Basic Concepts. McGraw-Hill Osborne
Media, Berkeley California USA.
Srinivasan, M. A. and Basdogan, C. (1997). Haptics in
virtual environments: Taxonomy, research status, and
challenges. Computers & Graphics, 21(4):393–404.
Strasnick, E., Holz, C., Ofek, E., Sinclair, M., and Benko,
H. (2018). Haptic links: bimanual haptics for virtual
reality using variable stiffness actuation. In Proceed-
ings of the 2018 CHI Conference on Human Factors
in Computing Systems, page 644. ACM.
Sun, Y., Yoshida, S., Narumi, T., and Hirose, M. (2019).
Pacapa: A handheld vr device for rendering size,
shape, and stiffness of virtual objects in tool-based in-
teractions. In Proceedings of the 2019 CHI Confer-
ence on Human Factors in Computing Systems, page
452. ACM.
Witmer, B. G. and Singer, M. J. (1998). Measuring pres-
ence in virtual environments: A presence question-
naire. Presence, 7(3):225–240.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
210
