
Player Tracking using Multi-viewpoint Images in Basketball Analysis
Shuji Tanikawa and Norio Tagawa
a
Graduate School of Systems Design, Tokyo Metropolitan University, Hino, Tokyo 191-0065, Japan
Keywords:
Basketball Analysis, Player Tracking, Occlusion Avoidance, Multiple Camera, Radon Transform, OpenPose.
Abstract:
In this study, we aim to realize the automatic tracking of basketball players by avoiding occlusion of players,
which is an important issue in basketball video analysis, using multi-viewpoint images. Images taken with
a hand-held camera are used, to expand the scope of application to uses such as school club activities. By
integrating the player tracking results from each camera image with a 2-D map viewed from above the court,
using projective transformation, the occlusion caused by one camera is stably solved using the information
from other cameras. In addition, using OpenPose for player detection reduces the occlusion that occurs in
each camera image before all camera images are integrated. We confirm the effectiveness of our method by
experiments with real image sequences.
1 INTRODUCTION
Research on sports video analysis has been conducted
actively in recent years, with the aim of improving
individual players’ ability and team competitiveness,
and providing effective information to audiences (Xu
et al., 2004)(Vaeyens et al., 2007). In the field of
basketball analysis, conventionally, there has been
detailed study of video processing after an individ-
ual player is cut out: for example, analysis of shoot
forms (Liu et al., 2011) and elucidation of the me-
chanics of the human body when an injury occurs
(Krosshaug et al., 2007). In addition, in recent years,
there has been advanced research on analysis of team
play, such as screen play and pick and roll (Chen
et al., 2009)(Chen et al., 2012)(Fu et al., 2011)(Liu
et al., 2011)(Lucey et al., 2014)(Liu et al., 2013)-
(Lucey et al., 2014). These studies often analyze a
non-occlusion image taken from above the court, to
easily realize and use player tracking (see Fig. 1), or
the player tracking results may be processed manually
by analysts. For football videos, many stable player
tracking methods using probabilistic techniques, such
as the Kalman filter or particle filter, have been pro-
posed. In basketball, in contrast to soccer, occlusion
between players occurs frequently because of differ-
ences in the size of the court and the camera view-
points, so a practical method for automatic player
tracking has not yet been established.
We do not assume a special environment—for ex-
a
https://orcid.org/0000-0003-0212-9265
ample, a stadium with multiple cameras placed on the
ceiling—to enable the player tracking method to be
applicable to club activities in high school and junior
high school. For these purposes, it is desirable to pro-
cess images that are captured by hand-held cameras
from the side, or obliquely above the court (Wen et al.,
2016)(Hu et al., 2011). In this case, occlusion be-
tween players is extremely likely to occur. Therefore,
we consider the use of multiple videos taken from
different viewpoints, which potentially allows play-
ers hidden from one camera to be captured by another
camera. In addition, as another advantage of using
multiple viewpoints, acquisition of three-dimensional
information about players becomes possible.
In this study, we assume three cameras with dif-
ferent viewpoints, and propose a method to integrate
the information about the players’ positions obtained
by them appropriately. Because each camera contin-
ually changes its viewpoint, it is necessary to perform
calibration efficiently, assuming real-time processing.
When detecting a player in each image, it is desirable
to use a method that is effective even in the presence
of occlusion. Integrating the information from each
camera requires a procedure to ensure sufficient sta-
bility when the player is hidden from a particular cam-
era or when the player is detected again. In this paper,
we propose a player tracking system that satisfies the
above requirements. The first feature of the proposed
method is to use OpenPose, a human joint detection
method based on Deep Neural Network architecture,
to avoid some occlusion of players. Another feature
Tanikawa, S. and Tagawa, N.
Player Tracking using Multi-viewpoint Images in Basketball Analysis.
DOI: 10.5220/0009097408130820
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
813-820
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
813
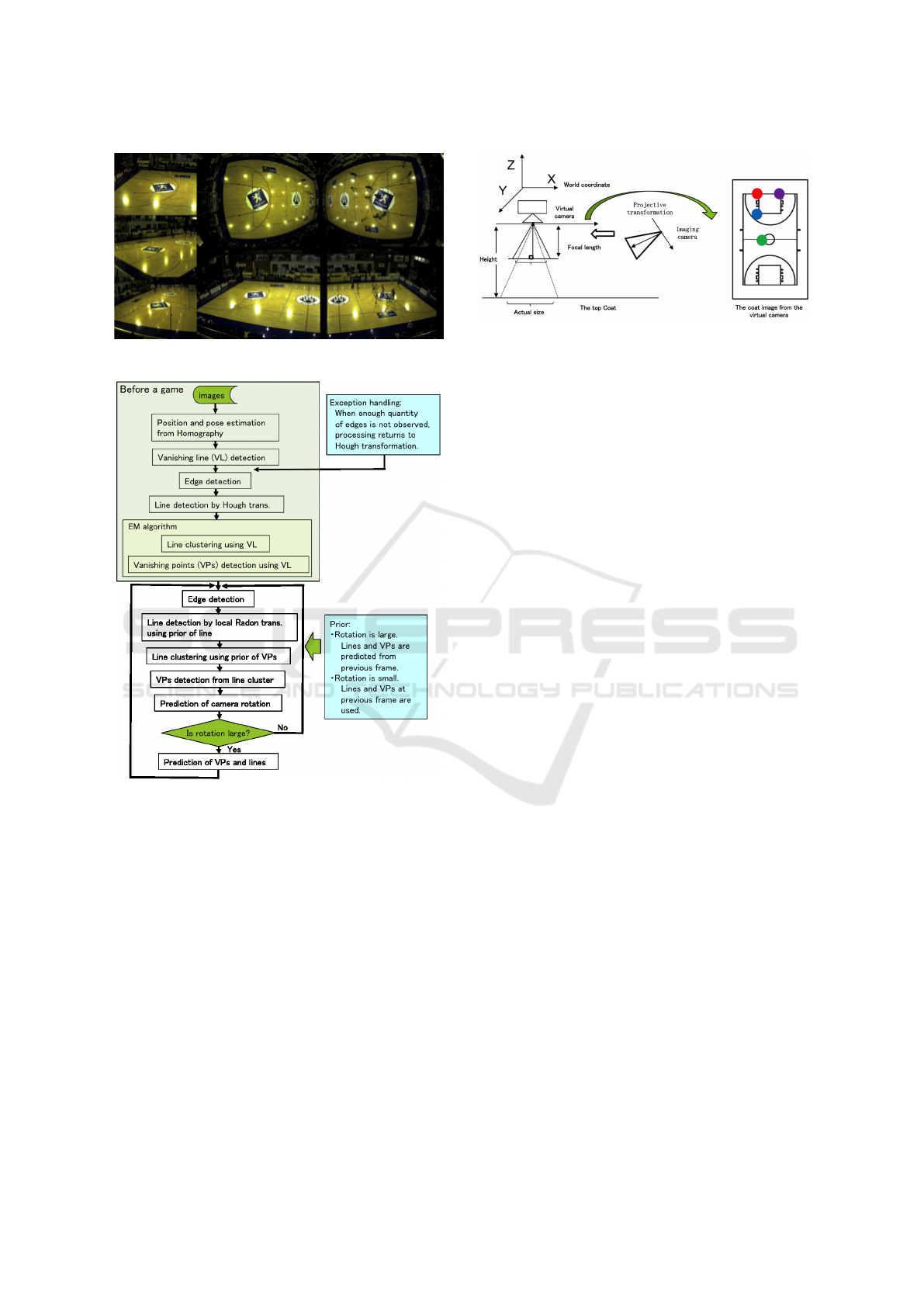
Figure 1: Examples of images captured above the court.
Figure 2: Outline of our camera pose estimation.
is that the position of the player detected from each
camera’s viewpoint is converted into a reference im-
age viewed from above the court, and the detection
results from multiple viewpoints in the reference im-
age are appropriately integrated. In consideration of
cases where a player cannot be seen due to occlusion
in a certain camera, a data structure and an algorithm
capable of handling the disappearance and occurrence
of a player position are developed. The performance
and effectiveness of our method has been confirmed
through real image experiments.
Figure 3: Camera layout and coordinates, and relation be-
tween captured image and reference image.
2 CALIBRATION OF CAMERA
POSE
Our method for calibrating the camera position and
direction has been proposed in (Idaka et al., 2017) in
advance. This section introduces the outline shown
in Fig. 2. Because a basketball game is played alter-
nately in each half court, the camera direction moves
back and forth between both half courts, depending
on the offense and defense. Therefore, before start-
ing the game, the standard position and direction cor-
responding to each half court should be determined.
Because an image without a player can be used, fea-
ture point correspondence, using a court corner or
similar feature, can easily be adopted. The homog-
raphy matrix
~
H representing the projective transfor-
mation is determined, and decomposed into camera
rotation and translation using the following equation
(Kanatani, 1993).
k
~
H
>
=
r
~
I +
p
q
r
A B C
~
R, (1)
where (p,q,r) denotes the plane Z = pX +qY +r cor-
responding to the court, (A, B,C) indicates the camera
position,
~
R indicates the camera direction,
~
I indicates
a 3 ×3 unit matrix, and k is an arbitrary value. The co-
ordinates of the virtual camera viewing a court from
directly above are used as the world coordinates, and
the two-dimensional map (2-D map) used in the fol-
lowing is defined by the image viewed by the virtual
camera. Figure 3 shows the relation between the vir-
tual camera and the actual imaging camera. The pose
of the imaging camera is measured with respect to
the world coordinates. The colored points in the right
panel of Fig. 3 are the feature points used to determine
~
H in Eq. 1.
In the processing during a game, under the as-
sumption that the camera position slightly changes,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
814
N frame
N+1 frame
N+2 frame
Manage as a trajectory
y
x
Processing at each view point
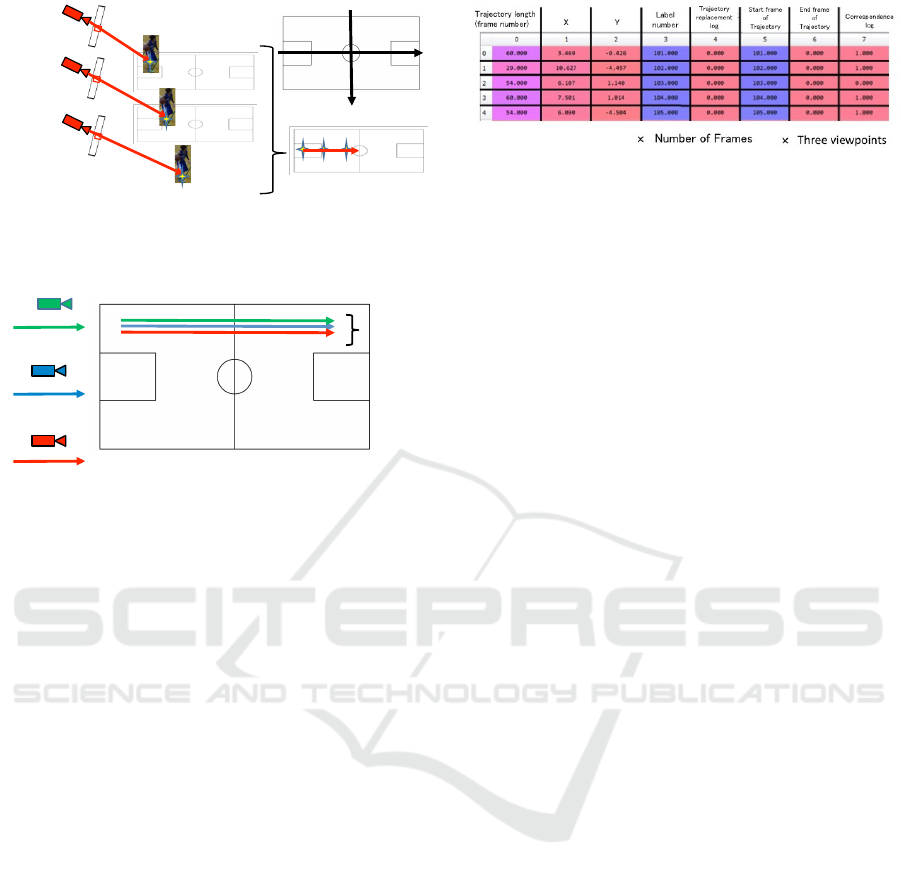
Figure 4: Generation of player’s trajectory from player de-
tection result in video from each viewpoint.
Viewpoint1
Viewpoint2
Viewpoint3
Manage
astrack
Figure 5: Trajectories from each viewpoint that are close on
the 2-D map in multiple successive frames are grouped as a
track.
the camera direction is estimated at each frame by de-
tecting two orthogonal vanishing points (VPs). When
the viewing direction is fixed, the camera may move
because of hand movement, which is expected to be
random and small. In contrast, when the viewing di-
rection is intentionally changed, a comparatively large
rotation should be considered. For a small rotation,
the VPs can be detected by the Radon transform, in-
stead of the Hough transform, to reduce the computa-
tional cost. By the Radon transform, the Hough pa-
rameter space can be evaluated locally around the pa-
rameters obtained in the previous frame. The details
is explained in (Idaka et al., 2017).
3 PLAYER TRACKING METHOD
3.1 Outline of Tracking
Our tracking method has the following features:
1. The results of detecting each player from each
viewpoint are projected onto a common 2-D map,
and a “trajectory” corresponding to each player
is determined while evaluating the temporal con-
tinuity between frames (see Fig. 4). Here, the
trajectory is defined as the tracking result of the
player from a single viewpoint. The tracking re-
sults from all viewpoints can be evaluated in the
same coordinate system.
Figure 6: Data structure representing information of play-
ers’ trajectories. Information of each player’s trajectory, the
start frame and end frame of the trajectory (0 indicates that
tracking is in progress), and other information are organized
and stored for each frame and each viewpoint. For “replace-
ment log” and “correspondence log,” refer to explanation in
the text.
2. By matching the trajectories from multiple view-
points, one consistent “track” is created for each
player. Occlusion can be overcome and the tra-
jectories of the bench players can be deleted (see
Fig. 5).
The following subsections explain the details.
3.2 Player Detection
We first detect the players based on the color infor-
mation of the uniform. Color information is essential
to identify a team, but if multiple players on the same
team approach and cause occlusion, they cannot be
distinguished.
In addition, OpenPose (Cao et al., 2017) has re-
cently been applied to various studies. OpenPose can
detect human joint information from an image; be-
cause skeletal information is used, it is possible to de-
tect the presence of a person even if some joints are
hidden. In this study, we investigate to what extent
the OpenPose method can avoid occlusion, compared
with using only color information.
Because the obtained image includes spectators
and reserve players around the court, the area of the
court (plus a margin of 1 m around the court) is pro-
cessed, and pixels outside the area are excluded by the
projective transformation.
3.3 Player Trajectory Generation
To integrate the player detection results from each
viewpoint and each frame, the detection results are
projected onto a 2-D map using the camera position
and direction obtained in advance. The correct detec-
tion results for a specific player in successive frames
are in similar locations, both in the image and on the
2-D map. Regardless of the viewpoint, to normalize
the measurement of proximity, it should be evaluated
not on the image but on the 2-D map. Therefore, if
Player Tracking using Multi-viewpoint Images in Basketball Analysis
815
Correspondence
label of Player 1
Correspondence
label of Player 2
Correspondence
label of Player 3
Correspondence
label of Player 4
Correspondence
label of Player 5
View
Frame
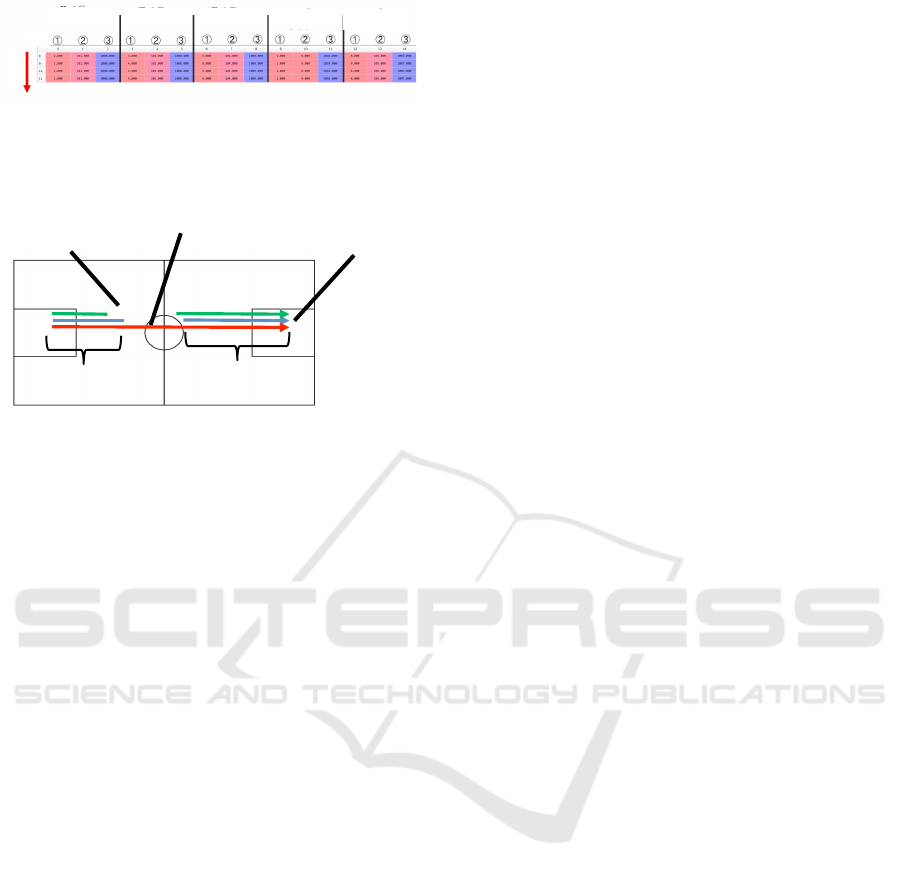
Figure 7: Data structure representing information of play-
ers’ tracks. It stores the trajectory number at each view-
point associated with each player. As the frames advance,
the structure extends downward.
X
X
Occlusion
Correspondence
Re-correspondence
Weunderstandthatitisoneplayer'strajectories.
It is visible only from this viewpoint.
Figure 8: Correspondence of trajectories when occlusion
occurs.
there are player candidates projected within 1 m, for
both X and Y coordinates, on the 2-D map in succes-
sive frames, the set of points on the 2-D map is man-
aged as a trajectory. This procedure is illustrated in
Fig. 4. The threshold of 1 m is a value determined in
this experiment; it is necessary to consider a system-
atic method to determine this threshold in the future.
Trajectories are collectively managed as an array
data structure for each frame, from each viewpoint,
as shown in Fig. 6. It contains information such as
length, coordinates, label number (which is the man-
agement number of the trajectory), and the correspon-
dence log (which is the number of the viewpoint to
which the trajectory corresponds). Figure 6 shows the
data for one team, comprising five players. If there
are multiple projected player candidates within the
threshold, a trajectory is created based on the coordi-
nates of the player closest to the player in the previous
frame, and “1” is placed in the replacement log after
this frame. When processing the subsequent trajec-
tory generation, if the trajectory is not associated with
a trajectory obtained from another viewpoint, the tra-
jectory is regenerated using a more distant candidate
player by tracing back to the last frame having “1” in
the replacement log.
3.4 Player Track Generation
The correctness of the trajectory detected from each
viewpoint is confirmed by comparison with trajecto-
ries from other viewpoints. A specific player’s tra-
jectories should make the same movement on the 2-D
map. If the player’s trajectory projected in multiple
consecutive frames from one viewpoint exists close to
the player’s trajectory from another viewpoint, these
trajectories are considered to correspond, and they
are recognized as a collection of the player’s correct
trajectories. An example of a trajectory that is de-
tected incorrectly is the trajectory of a reserve player.
Even if the background is removed using the projec-
tive transform, the torso and head of the reserve player
on the near side tend to remain in the image more than
the reserve player on the far side of the court. These
areas are difficult to cut even if we use the colors or
the human joints of the players, and they are detected
as trajectories as long as they continue to appear in the
image, so the correspondence with other viewpoints is
used to distinguish them from the correct players.
Correspondence processing is performed for all
frames in temporal order. The trajectories from each
viewpoint in the frame being processed are compared
in a round-robin manner, and correspondence is made
using coordinates in a number of successive frames;
this number was defined as 10 frames in this study.
If a trajectory that has been interrupted by occlusion
is subsequently detected again, multiple tracks may
be present nearby. If we try to map the trajectory to
the track immediately, there are multiple candidates
and the ambiguity is high. Therefore, the frame is ad-
vanced until the player’s position on the track deviates
from the other players’ positions to a certain extent,
and then correspondence with the track is made. In
this study, we set the separation threshold to 1.5 m
experimentally.
The associated trajectories are recognized to be
the correct player’s trajectories, and the average value
of the trajectories, in each frame from their start frame
to their end frame, is taken as the coordinates of the
player in that frame; in addition, the coordinates in
successive frames become the track of the player. By
placing the number identifying the viewpoint in the
correspondence log in the corresponding trajectory,
it is made clear which viewpoint has been matched,
while avoiding double correspondence with the tra-
jectories of other players. The trajectories for which
correspondence has been made are managed collec-
tively using an array data structure. This array is
called a track array, and the label numbers of trajec-
tories of each viewpoint that are associated with each
player, as shown in Fig. 7, are stored for each frame.
Figure 7 shows an example in which the label num-
bers of the trajectories constituting the trajectories of
the 8th to 11th frames are represented. The coordi-
nates of player 1 are calculated from the 1st trajectory
of the 1st viewpoint, 101st trajectory of the 2nd view-
point, and 1001st trajectory of the 3rd viewpoint. The
details can be understood by referring to the frame
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
816
numbers and trajectory numbers in each trajectory ar-
ray.
Because there are five basketball players in each
team, it is desirable that five tracks exist in each
frame. However, there are cases where a trajectory
is interrupted because occlusion occurs. We assume
that if occlusion occurs from one viewpoint and the
trajectory is interrupted, the trajectory continues from
other viewpoints. Even if the trajectory is interrupted
at a viewpoint where occlusion occurs, tracking can
be performed while avoiding the occlusion by corre-
lating the trajectory restored thereafter with the con-
tinued trajectory from another viewpoint (see Fig. 8).
This is the feature of this method. Therefore, it is nec-
essary to confirm whether the trajectories already as-
sociated with each other correspond to the trajectories
that have appeared after occlusion in the viewpoint
image in which the discontinuation occurs. Even if
occlusion occurs, it is desirable that the trajectory of
one of the viewpoints is connected, but if occlusion
occurs in three or more players at one location, or oc-
clusion occurs continuously in a short time, the trajec-
tory is interrupted from all of the viewpoints. There-
fore, exception handling is required in the following
cases:
• One Player Whose Trajectory has been Lost
from Three Viewpoints. The track that has reap-
peared in the subsequent frame is assigned to this
player. In this way, it is possible to avoid mistakes
in trajectory assignment.
• Two or More Players Whose Trajectories have
been Lost from three Viewpoints. Although it
would be possible to track several players after the
occurrence of an occlusion, it is possible that the
player IDs initially assigned to trajectories may be
interchanged with one another. This is because it
may not be possible to distinguish between play-
ers from the same team in the image. If all of
the (two or more) trajectories are broken, when
the trajectories are restored again and associated
with players, each track is assigned to the player
whose position is closest to the position of the
player that was associated with the track before
the break. However, it is difficult to be certain
that the track can be reliably reassigned to the cor-
rect player. Therefore, the players and tracks that
may have been wrongly associated, and the corre-
sponding frame numbers, are managed as a batch.
After the processing is completed, track assign-
ments are manually confirmed; if track assign-
ments are confirmed, all such assignments made
after that frame are confirmed. This ensures the
correctness of tracking.
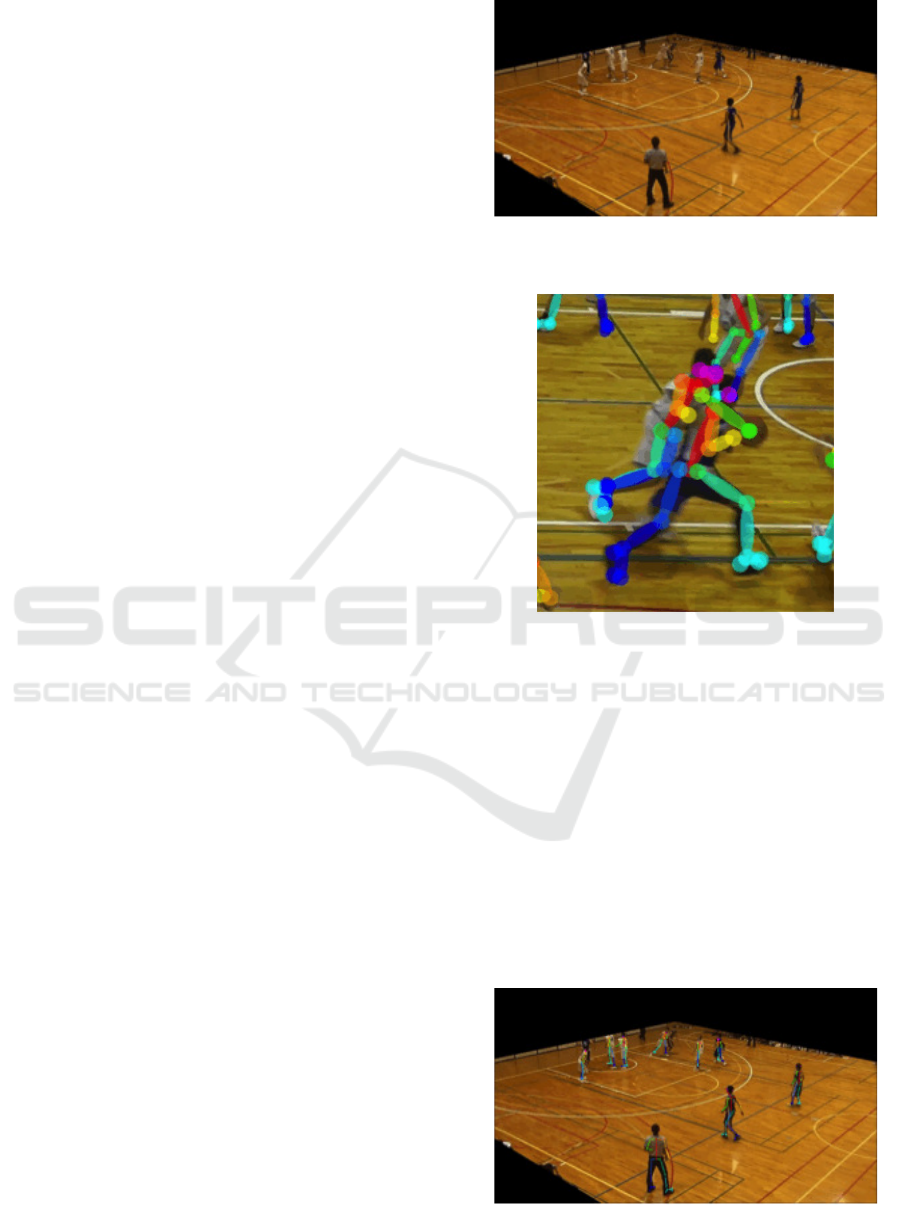
Figure 9: Result of removing the area outside the court us-
ing homography transformation.
Figure 10: Measurement of human joints by OpenPose.
4 EXPERIMENT
The experiment was performed using videos captured
from three viewpoints. The camera used was Pana-
sonic’s digital high-definition camera (‘Panasonic:
HC-V360M, resolution: 1920 x 1080, 30 frames/sec).
We selected 180 consecutive frames and tracked play-
ers while overcoming the problem of occlusion. Fig-
ure 9 shows a processing area in which the area out-
side the court has been removed using the homogra-
phy transfomation determined during camera calibra-
Figure 11: Multiple players detected using OpenPose.
Player Tracking using Multi-viewpoint Images in Basketball Analysis
817
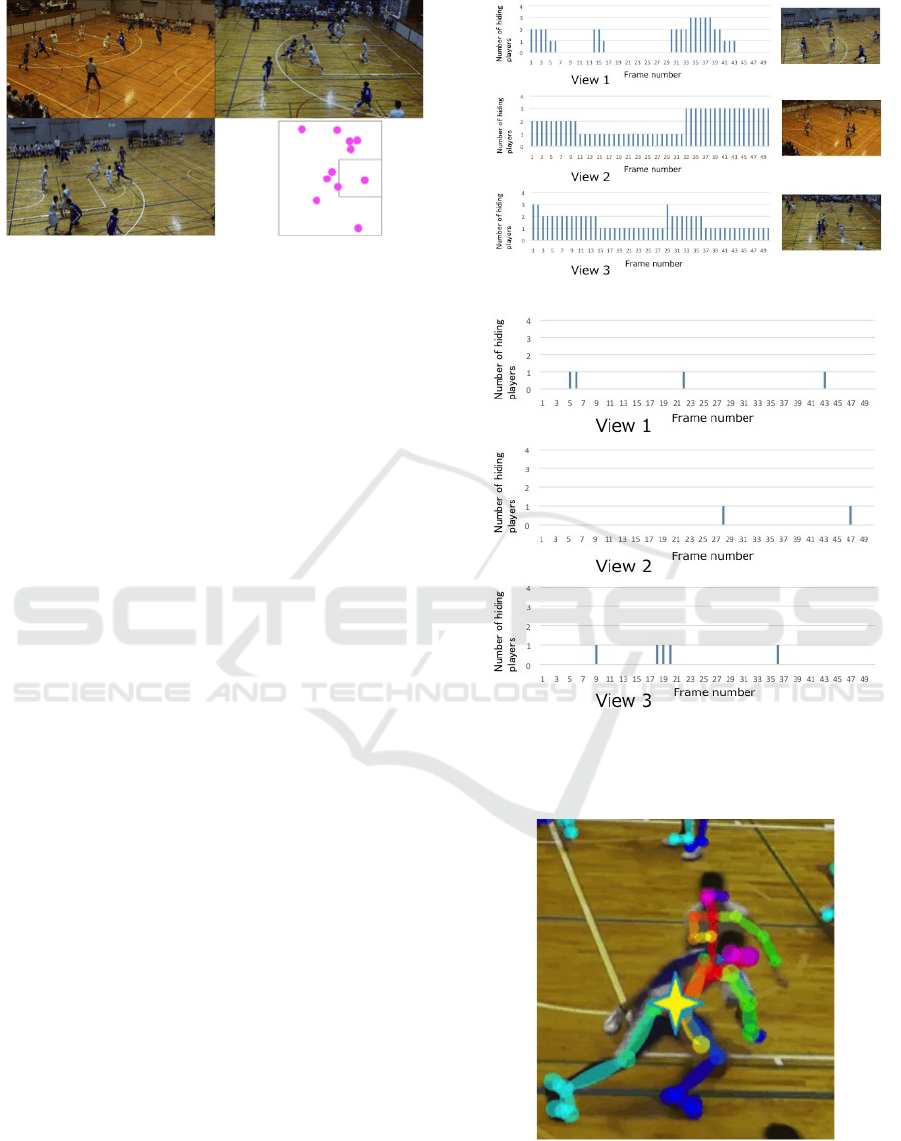
Figure 12: Three views and players’ positions on 2-D map
using OpenPose.
tion.
Figure 10 is an example of joint information ob-
tained by OpenPose, and Fig. 11 shows how Open-
Pose detects multiple players in an image simulta-
neously from a certain viewpoint. The appearance
of one frame of the player tracking result, when us-
ing OpenPose, is shown in Fig. 12, together with the
three view images used. Figure 13 shows the num-
ber of hidden players in each frame, from each view-
point. Occlusion is clearly reduced by using Open-
Pose. When only color information was used, the
average occlusion rate per viewpoint was 0.14% for
three players, 0.26% for two players, 0.42% for one
player, and 0.21% for no occlusion. However, ex-
cept for one time, occlusion avoidance using multiple
viewpoints was performed correctly by the proposed
method. The failed case involved frames in which two
players could not be detected at the same time from all
of three viewpoints, and when the track was recalcu-
lated, player substitution occurred. In contrast, when
player detection was performed using joint informa-
tion from OpenPose, occlusion (from more than one
viewpoint) did not occur in the same frame. There-
fore, players were always detected from at least two
viewpoints, and occlusion was avoided in all cases.
Another advantage of using OpenPose is that the
resulting trajectories were stable, reducing apparent
position errors. With uniform color information, vari-
ous positions on the back and abdomen were detected
as player positions, whereas, when using OpenPose, it
was possible to identify and detect the position of the
waist with a relatively small difference between play-
ers. The star in Fig. 14 indicates the waist position de-
tected by OpenPose from an example image. There-
fore, when performing homography transformation, a
standard waist height could be used, and the position
error on the 2D map was reduced.
(a)
(b)
Figure 13: Time transition of the number of hidden players
by method using (a) color and (b) OpenPose.
Figure 14: Waist position detected by OpenPose is indicated
by a star.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
818

5 CONCLUSIONS
In this study, we proposed a basketball player track-
ing method that integrates information from multi-
ple viewpoints appropriately. The method is based
on video captured by hand-held cameras from around
the court and from the spectator seats, and its appli-
cability is very high. We also confirmed that using
OpenPose for player detection is very effective, com-
pared with using the team uniform color alone. Be-
cause team distinction needs to use uniform color, we
plan to extract color information from the OpenPose
detection results.
To confirm the effectiveness of integrating infor-
mation from multiple cameras, we focused on the
implementation of algorithms to integrate trajecto-
ries obtained from each viewpoint on 2-D reference
maps. One of the features of the proposed method
is that player tracking at each viewpoint, called tra-
jectory generation, and integration of these trajecto-
ries, called trajectory generation, are all performed on
the same 2-D reference map using homography. This
makes it possible to evaluate the proximity of the de-
tected player position without depending on the posi-
tion of the player or the camera viewpoint. To oper-
ate this algorithm stably, it is necessary to accurately
detect trajectories from each viewpoint. Currently,
we identify players close to each other in successive
frames as the same player, but in the future we plan
to add statistical improvements, such as introducing
a Kalman Filter (Lu et al., 2013) and Bayesian eval-
uation (Xing et al., 2011). Building a motion model
using the game context (Liu et al., 2013) and mod-
eling the relationship between the ball and the player
(Maksai and X. Wang, 2016) are also important issues
for accurately tracking the player.
Since joint information by the OpenPose can be
used as it is for correspondence from different view-
points, three-dimensional recognition of joint place-
ment is easy to realize. Therefore, in addition to the
closeness of the player position between frames, we
are investigating whether the tracking of the player
can be made more accurate by using the inter-frame
matching of this three-dimensional joint information.
Future issues include three-dimensional recogni-
tion of players, application of this method to team
play and tactical analysis, and ball detection linked to
the recognition of dribbling, passing, and shots. For
this purpose, three-dimensional reconstruction from
joint information detected by the OpenPose is effec-
tive. In recent years, the application of Deep Neural
Network that handles time series to human behavior
recognition has been actively studied. Application to
sports analysis is also underway (Baccouche et al.,
2010), (Tsunoda et al., 2017), (Wang and Zemel,
2016). We plan to develop such a DNN-based method
using joint three-dimensional motion information as
input.
ACKNOWLEDGEMENTS
We would like to thank Dr. Shinji Ozawa, Emeritus
professor of Keio University, Japan, for valuable ad-
vice on this research. In addition, we thank Edanz
Group (https://en-author-services.edanzgroup.com/)
for editing a draft of this manuscript. Part of this
work was supported by JSPS KAKENHI, grant num-
ber 19K12046.
REFERENCES
Baccouche, M., Mamalet, F., Wolf, C., Garcia, C., and
Baskurt, A. (2010). Action classification in soccer
videos with long short-term memory recurrent neural
networks. In Proc. Int. Conf. on Artificial Neural Net-
works.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In Proc. IEEE CVPR, pages 7291–7299.
Chen, H.-T., Chou, C.-L., Fu, T.-S., Lee, S.-Y., and Lin, B.-
S. P. (2012). Recognizing tactic patterns in broadcast
basketball video using player trajectory. J. Vis. Com-
mun. Image R., 23:932–947.
Chen, H.-T., Tien, M.-C., Chen, Y.-W., Tsai, W.-J., and
Lee, S.-Y. (2009). Physics-based ball tracking and 3d
trajectory reconstruction with applications to shooting
location estimation in basketball video. J. Vis. Com-
mun. Image R., 20:204–216.
Fu, T.-S., Chen, H.-T., Chou, C.-L., Tsai, W.-J., and Lee, S.-
Y. (2011). Screen-strategy analysis in broadcast bas-
ketball video using player tracking. In Proc. IEEE
Visual Commun. and Image Process.
Hu, M.-C., Chang, M.-H., Wu, J.-L., and Chi, L. (2011).
Robust camera calibration and player tracking in
broadcast basketball video. IEEE Trans. Multimedia,
13(2):266–279.
Idaka, Y., Yasuda, K., Ho, Y., and Tagawa, N. (2017). Cost-
effective camera pose estimation for basketball analy-
sis using radon transform. In Proc. Int. Conf. Infomat-
ics, Electronics and Vision.
Kanatani, K. (1993). Geometric Computation for Machine
Vision. Oxford University Press, Oxford, U.K.
Krosshaug, T., Nakamae, A., Boden, B., and et al. (2007).
Mechanisms of anterior cruciate ligament injury in
basketball: Video analysis of 39 cases. The American
Journal of Sports Medicine, 35(3):359–367.
Liu, J., Carr, P., Collins, R.-T., and Liu, Y. (2013). Tracking
sports players with context-conditioned motion mod-
els. In Proc. IEEE CVPR, pages 1830–1837.
Player Tracking using Multi-viewpoint Images in Basketball Analysis
819

Liu, Y., Liu, X., and Huang, C. (2011). A new method
for shot identification in basketball video. Journal of
Software, 6(8):1468–1475.
Lu, W.-L., Ting, J.-A., Little, J. J., and Murphy, K. P.
(2013). Learning to track and identify players from
broadcast sports videos. IEEE Trans. Pattern Anal.
Machine Intell., 35(7):1704–1716.
Lucey, P., Bialkowski, A., Carr, P., Yue, Y., and Matthews,
I. (2014). How to get an open shot: Analyzing team
movement in basketball using tracking data. In Proc.
MIT SLOAN Sports Analytics Conf.
Maksai, A. and X. Wang, P. F. (2016). What players do with
the ball: A physically constrained interaction model-
ing. In Proc. IEEE CVPR, pages 972–981.
Tsunoda, T., Komori, Y., Matsugu, M., and Harada, T.
(2017). Football action recognition using hierarchical
lstm. In Proc. IEEE CVPR Workshops.
Vaeyens, R., Lenoir, M., Williams, A.-M., Mazyn, L., and
Philippaerts, R.-M. (2007). The effects of task con-
straints on visual search behavior and decision mak-
ing skill in youth soccer players. Jour. Sport Exercise
Psychology, 29(2):147–169.
Wang, K.-C. and Zemel, R. (2016). Classifying nba offen-
sive plays using neural networks. In Proc. MIT Sloan
Sports Analytics Conf.
Wen, P.-C., Cheng, W.-C., Wang, Y.-S., Chu, H.-K., Tang,
N.-C., and Liao, H.-Y.-M. (2016). Court reconstruc-
tion for camera calibration in broadcast basketball
videos. IEEE Trans. Visualization and Computer
Graphics, 22(5):1517–1526.
Xing, J., Ai, H., Liu, L., and Lao, S. (2011). Multiple
player tracking in sports video: A dual-mode two-
way bayesian inference approach with progressive ob-
servation modeling. IEEE Trans. Image Processing,
20(6):1652–1667.
Xu, M., Orwell, J., and Jones, G. (2004). Tracking foot-
ball players with multiple cameras. In Proc. IEEE Int.
Conf. Image Processing, volume 3, pages 2909–2912.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
820
