
A Method for Detecting Human-object Interaction based on
Motion Distribution around Hand
Tatsuhiro Tsukamoto
1
, Toru Abe
2 a
and Takuo Suganuma
2 b
1
Graduate School of Information Sciences, Tohoku University, 2-1-1 Katahira, Aoba-ku, Sendai 980-8577, Japan
2
Cyberscience Center, Tohoku University, 2-1-1 Katahira, Aoba-ku, Sendai 980-8577, Japan
Keywords:
Human-object Interaction Detection, Human Skeleton, Forearm Movement, Motion around Hand.
Abstract:
Detecting human-object interaction in video images is an important issue in many computer vision applica-
tions. Among various types of human-object interaction, especially the type of interaction where a person
is in the middle of moving an object with his/her hand is a key to observing several critical events such as
stealing luggage and abandoning suspicious substances in public spaces. This paper proposes a novel method
for detecting such type of human-object interaction. In the proposed method, an area surrounding each hand
is set in input video frames, and the motion distribution in every surrounding area is analyzed. Whether or not
each hand moves an object is decided by whether or not its surrounding area contains regions where move-
ments similar to those of the hand are concentrated. Since the proposed method needs not explicitly extract
object regions and recognize their relations to person regions, the effectiveness in detecting the human-object
interaction, technically hands which are right in the middle of moving objects, is expected to be improved for
diverse situations, e.g., several persons individually move unknown objects with their hands in a scene.
1 INTRODUCTION
Detecting human-object interaction in video images
is an important issue in many computer vision ap-
plications, e.g., surveillance, human-computer inter-
face, virtual reality, and sport image analysis. Among
various types of human-object interaction, especially
the type of interaction where a person is in the mid-
dle of moving an object with his/her hand is a key to
observing several critical events such as stealing lug-
gage and abandoning suspicious substances in public
spaces. Most existing methods for detecting human-
object interaction extract object regions from an in-
put video image and recognize the relations of them
to person regions (Le et al., 2014; Chao et al., 2015;
Meng et al., 2018; Zhang et al., 2019). Consequently,
when there are several persons and moving objects in
a scene, it is hard for the existing methods to accu-
rately detect the persons who move the objects with
their hands, due to the difficulties in recognizing the
relations of the object regions to the person regions
and/or their body part regions.
We propose a novel method for detecting human-
a
https://orcid.org/0000-0002-3786-0122
b
https://orcid.org/0000-0002-5798-5125
object interaction where persons are in the middle
of moving objects with their hands. In our method,
an area surrounding each hand is set in every input
video frame, and then the motion distribution in each
surrounding area is analyzed. Whether or not each
hand moves an object is decided by whether or not its
surrounding area contains regions where movements
similar to those of the hand are concentrated. Since
the proposed method needs not explicitly extract ob-
ject regions and recognize their relations to person
regions, the above-mentioned issues in the existing
methods can be solved and the effectiveness in detect-
ing the human-object interaction, technically hands
which are right in the middle of moving objects, is
expected to be improved for diverse situations, e.g.,
several persons individually move unknown objects
with their hands in a scene.
The remainder of this paper is organized as fol-
lows: Section 2 presents the existing methods of
human-object interaction detection, Section 3 ex-
plains the details of our proposed method for detect-
ing human-object interaction based on the motion dis-
tribution around a hand, Section 4 presents the results
of human-object interaction detection experiments on
several different types of video images, and then Sec-
tion 5 concludes this paper.
462
Tsukamoto, T., Abe, T. and Suganuma, T.
A Method for Detecting Human-object Interaction based on Motion Distribution around Hand.
DOI: 10.5220/0009092204620469
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
462-469
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Input video frames
⇒
(a)
⇒
(b)
⇒
(c)
⇒
Detection results
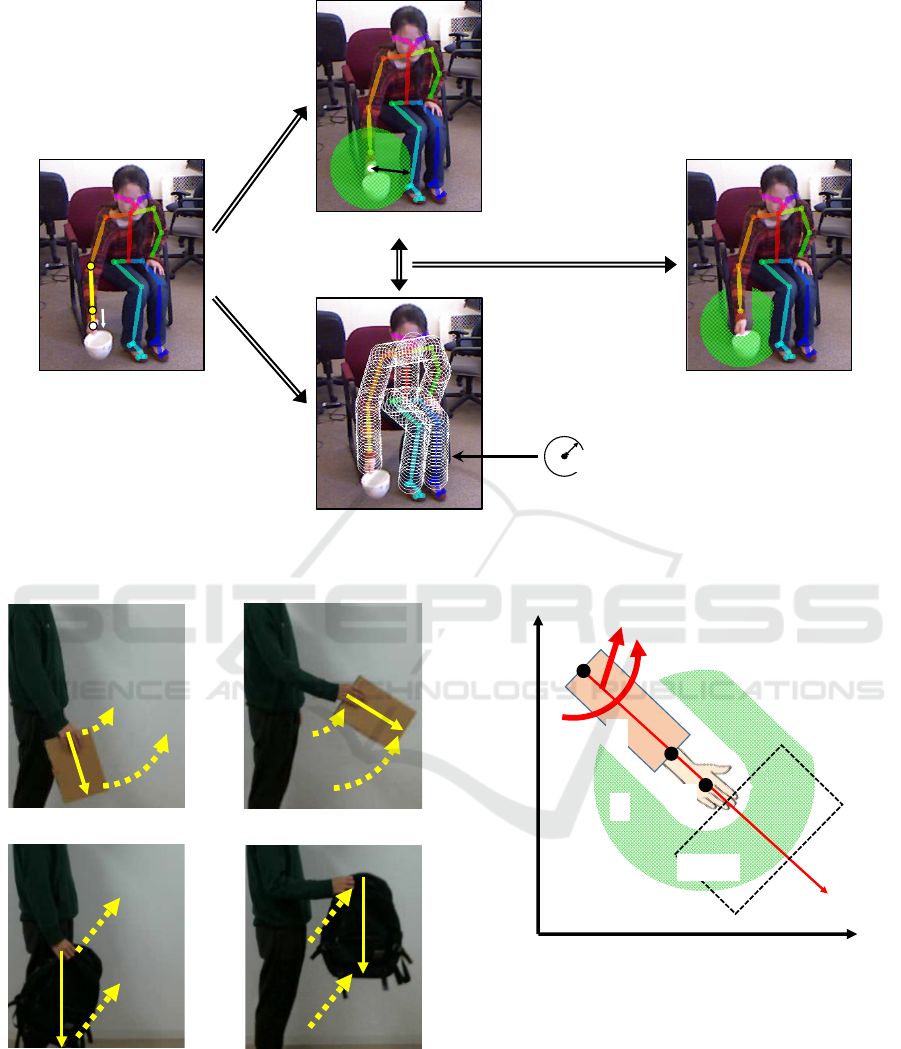
Figure 1: Overview of the proposed method. (a) extracting the skeleton of each person from every input video frame, (b) set-
ting an individual area surrounding each visible and moving hand, (c) analyzing the motion distribution in each surrounding
area. Red parts represent regions where movements similar to those of the hand are concentrated.
2 RELATED WORK
Various methods have been proposed for detecting
human-object interaction in 2D images and/or depth
images. Their aims vary widely, e.g., monitoring of
daily activities in rooms (Meng et al., 2018), observa-
tion of customer behavior in retail environments (Li-
ciotti et al., 2014), detection of stealing luggage (Roy
and Chalavadi, 2018) and abandoning suspicious ob-
jects (Lin et al., 2015; Ghuge and Dhulekar, 2017) in
public spaces, and analysis of sport images (Leo et al.,
2008; Shih, 2018). To detect human-object interac-
tion, most existing methods extract object and person
regions from input images, and recognize the rela-
tions between the extracted regions. Since the region
extraction of unknown objects and the relation recog-
nition between object and person regions are still dif-
ficult, such human-object relation based methods can-
not easily adapt to the situations where several per-
sons individually move unknown objects in a scene.
Compared to those, based on the observation that
important interaction between persons and objects are
made mainly through their hands, several methods
have been proposed for detecting a person’s hand
which moves an object by the states around the hand.
The depth image based method in (Ubalde et al.,
2014) detects such type of human-object interaction
by the depth changes around a hand. The 2D im-
age based method in (Mitsuhashi et al., 2014) detects
human-object interaction by the motion (optical flow)
distribution around a hand. Since these methods need
not explicitly extract object regions and recognize
their relations, the problems in the human-object rela-
tion based methods are expected to be solved. How-
ever, in these methods, procedures for setting the area
around a hand, acquiring states from the area, and an-
alyzing the acquired states have not been investigated
adequately. Consequently, these methods cannot pro-
P
E
P
W
L
L/4
F
Figure 2: Forearm region F.
duce intended effects on detecting the human-object
interaction in diverse situations.
3 PROPOSED METHOD FOR
DETECTING HUMAN-OBJECT
INTERACTION
Figure 1 shows the overview of our proposed method
for detecting human-object interaction. In the pro-
posed method, (a) the skeleton of each person is ex-
tracted from every input video frame, (b) an individ-
ual area surrounding each visible and moving hand is
set, and (c) the motion distribution in each surround-
ing area is analyzed. According to the analysis result
for each hand, our method decides whether or not the
hand moves an object by whether or not its surround-
ing area contains regions where movements similar to
those of the hand are concentrated. In the following,
we explain the proposed method details.
A Method for Detecting Human-object Interaction based on Motion Distribution around Hand
463

3.1 Extracting Skeleton of Each Person
In recent years, human detection technology has made
great progress and it allows to extract accurately body
parts from images. We obtain the skeleton of each
person (a set of human body keypoints) from every
input video frame (image) by OpenPose (Cao et al.,
2017). Hands whose skeletons are not extracted from
the image are ignored as invisible, and moreover,
hands at rest are also ignored in subsequent processes.
To decide whether or not a hand moves, as shown
in Figure 2, a forearm region F is set along the fore-
arm skeleton (a line between the elbow P
E
and the
wrist P
W
keypoints). The size of F is L/4 by L,
where L is the length of the forearm skeleton in the
image. At each pixel p
m
in F, the observed move-
ment vo(p
m
) is obtained as optical flow. If the aver-
age of movement norms kvo(p
m
)k in F is large, the
proposed method decide that the hand moves. This
condition is expressed by
∑
p
m
∈F
kvo(p
m
)k
L × N
F
> T
F
, (1)
where N
F
is the number of pixels p
m
in F and T
F
is
a given threshold. Since the values of optical flow
are affected by the size of a target in the image, the
movement norm kvo(p
m
)k in Eq. (1) is normalized
by the forearm length L.
3.2 Setting Individual Area
Surrounding Each Hand
Based on the extracted skeletons, an individual area
is set for each visible and moving hand. Each area
surrounds the corresponding hand and excludes the
hand and the other body part region.
As shown in Figure 3 (a), for each forearm, a
straight line from the elbow P
E
to the wrist P
W
is ex-
tended by ∆L, where the extended portion is set as
∆L = 0.35 × L by referring to the standard body part
proportion (Drillis et al., 1964). The end of the ex-
tended line is regarded as the center O of the hand.
As shown in Figure 3 (b)-1, a circle centered at O with
radius R1 is set as a neighborhood area S
0
of the hand.
As shown in Figure 3 (b)-2, a circle with radius R2
is moved along the skeleton including the extended
line from P
E
to O, and its locus is determined as the
person’s body part region B. By excluding B from S
0
,
as shown in Figure 3 (c), the area S surrounding the
hand is obtained. In these procedures, R1 and R2 are
determined according to the forearm length L in the
image by R1 = α
1
L and R2 = α
2
L, where α
1
and α
2
are given parameters.
3.3 Analyzing Motion Distribution in
Each Surrounding Area
The individual area S surrounding each hand excludes
the hand and the other body part region B, thus if S
contains regions where movements similar to those
of the hand are concentrated, then these regions are
highly likely to correspond with an object moved with
the hand. To conduct such analysis, the proposed
method observes the movement at every pixel in S, es-
timates the movement expected to be observed at the
pixel when it corresponds with the moved object, and
acquires the distribution of the normalized differences
between the observed and the expected movements.
At each pixel p
n
= (x
n
,y
n
) in S, the observed
movement vo(p
n
) and the expected movement ve(p
n
)
are obtained as optical flow. The normalized differ-
ence ndv(p
n
) between vo(p
n
) and ve(p
n
) is computed
by
ndv(p
n
) =
kvo(p
n
) − ve(p
n
)k
kve(p
n
)k
. (2)
To estimate ve, we consider two types of typical ob-
ject movements.
Type 1 (ve
1
) : As shown in Figure 4 (a), when an
object is held tightly with a hand, it is not only
translated but also rotated. In this case, the move-
ment ve
1
(p
n
) at each pixel p
n
in the moved object
region is modeled as shown in Figure 5, where
T = (t
x
,t
y
) and ω are the translation and the rota-
tion components of a forearm movement, respec-
tively. Thus, ve
1
(p
n
) at p
n
in S is represented by
ve
1
(p
n
) = (−ωy
n
+t
x
, ωx
n
+t
y
). (3)
Type 2 (ve
2
) : When an object is held loosely with a
hand, as shown in Figure 4 (b), the object is al-
most entirely translated. In this case, the move-
ments at all pixels in the moved object region can
be assumed to be the same movement as ve
1
at the
center O of the hand. Thus, ve
2
(p
n
) at any pixel
p
n
in S is represented by
ve
2
(p
n
) = ve
1
(O). (4)
For computing ve
1
by Eq. (3), the translation compo-
nent T = (t
x
,t
y
) and the rotation component ω of a
forearm movement are required. To determine these
components, the optical flow vo(p
m
) is observed at
each pixel p
m
in a forearm region F, which is de-
scribed in Section 3.1. The components T
∗
and ω
∗
minimizing the square sum E
2
(T,ω) of the difference
between vo(p
m
) and ve
1
(p
m
) are computed by
E
2
(T,ω) =
∑
p
m
∈F
k
vo(p
m
) − ve
1
(p
m
)
k
2
, (5)
E
∗2
(T
∗
,ω
∗
) = min
T,ω
E
2
(T,ω), (6)
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
464
(a) Center O of hand (c) Area S surrounding hand
(b)-2 Body part region B
R2
(b)-1 Neighborhood area S’ of hand
P
E
P
W
O
ΔL
R1
O
S’
S
Excluding B from S’
Figure 3: An individual area surrounding each hand.
→
(a) Type 1 (ve
1
) : Holding object tightly.
→
(b) Type 2 (ve
2
) : Holding object loosely.
Figure 4: Two types of object movements.
and used for the components T and ω in Eq. (3). An
actual object movement is likely to be a combination
of Type 1 and 2 movements. Consequently, for com-
puting ndv(p
n
) at each p
n
, an expected movement
ve(p
n
) is expressed as a mixture of both type move-
S
T = (t
x
, t
y
)
ω
F
x
y
0
object
O
Figure 5: Object movement model (ve
1
).
ments ve
1
(p
n
) and ve
2
(p
n
) by
ve(p
n
) = β×ve
1
(p
n
) + (1 − β) × ve
2
(p
n
), (7)
where β ranges from 0 to 1. The value of β for each
p
n
is set as the one which minimizes the difference
between vo(p
m
) and ve(p
n
) by
min
β
kvo(p
n
) − ve(p
n
)k
2
. (8)
In the distribution of ndv(p
n
), when ndv(p
n
) show
low values at a sufficient number of pixels p
n
, the
A Method for Detecting Human-object Interaction based on Motion Distribution around Hand
465

hand is highly likely to be right in the middle of
moving an object. Accordingly, to detect such type
of human-object interaction, the proposed method
counts the number N
low
of pixels p
n
whose ndv(p
n
)
are lower than a given threshold T
low
as
ndv(p
n
) < T
low
, (9)
and decides that the hand moves an object when the
following condition is met
N
low
> γ × L, (10)
where γ is a given threshold. Eq. (10) means that the
proposed method can detect human-object interaction
if the area of an object moved with the hand is ob-
served more than γ × L pixels in the image.
4 HUMAN-OBJECT
INTERACTION DETECTION
EXPERIMENTS
4.1 Experimental Environments
To illustrate the effectiveness of our proposed method,
we have conducted experiments in detecting human-
object interaction.
In the current implementation of our proposed
method, the skeleton of each person are extracted
from every input video frame by OpenPose (Cao
et al., 2017), and the end keypoints (Eyes, Ears,
Heels, SmallToes, BigToes) of a human body are ig-
nored. Optical flow in images is obtained by DISOp-
ticalFlow (Kroeger et al., 2016). The thresholds de-
scribed in Sections 3.1 and 3.3 are set as T
F
= 0.02,
T
low
= 0.60, and the parameters described in Sec-
tion 3.2 are set as α
1
= 0.90, α
2
= 0.37, γ = 10.0.
As the input video images in the experiments, we
use 24 video images (640×480pixels RGB image se-
quences), which are chosen from “picking objects”
and “arranging objects” categories in CAD-120 (Kop-
pula et al., 2013). This dataset is open to the public
and widely used in human activity recognition experi-
ments. In each video image, a person moves an object
with his/her hand. Since the movement directions of
hands and the sizes of objects vary among the video
Table 1: Groups of video images used in the experiments.
movement direction object # of videos
to image plane size (# of frames)
Group (a) parallel large 6 (1896)
Group (b) parallel small 6 (1163)
Group (c) perpendicular large 6 (1860)
Group (d) perpendicular small 6 (1321)
images, we classify the video images into four groups
(a), (b), (c), and (d). As shown in Table 1, the direc-
tions of hand movements are roughly parallel to the
image plane in Groups (a), (b) video images, roughly
perpendicular to the image plane in Groups (c), (d)
video images, the sizes of objects are relatively large
in Groups (a), (c) video images, and relatively small
in Groups (b), (d) video images.
We determine visible hand (wrist) positions in
each frame of every video image, and label manu-
ally whether or not each hand moves an object as the
ground truth of human-object interaction. The detec-
tion results (visible and moving hands which hold ob-
jects) by the proposed method are compared with the
ground truth, and the number of True Positives T P,
False Negatives FN, and False Positives FP are cal-
culated. Even if a hand which moves an object is
detected correctly by the proposed method, the de-
tection result is regarded as a False Positive when its
forearm position (elbow and wrist keypoint positions)
is extracted incorrectly. From these values, Recall R,
Precision P, and F-measure F are computed by
R =
T P
T P + FN
, (11)
P =
T P
T P + FP
, (12)
F =
2 × R × P
R + P
. (13)
4.2 Experimental Results
Figure 6 shows examples of the experimental results.
In those images, each flesh-colored square indicates
the forearm region F set along a forearm which is ex-
tracted as visible one by OpenPose, each area com-
posed of green and red parts indicates the area S sur-
rounding a visible and moving hand, where green and
red parts represent regions of movements dissimilar
and similar to those of the hand, respectively, and
each red square indicates detected human-object in-
teraction (a hand which is in the middle of moving an
object) by the proposed method.
The detection accuracy by the proposed method
is listed in Table 2. In these results, False Negatives
and Positives due to hand extraction failures by Open-
Pose are included. As can be seen from these results,
the higher F-measure is attained for Groups (a), (b)
(subtotal F = 0.83) than for Groups (c), (d) (subto-
tal F = 0.54). The higher F is attained for Group (a)
(F = 0.84) than for Group (b) (F = 0.81), and the
higher F is attained for Group (c) (F = 0.57) than for
Group (d) (F = 0.45).
These results show that the proposed method is
more affected by the movement direction of a hand
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
466
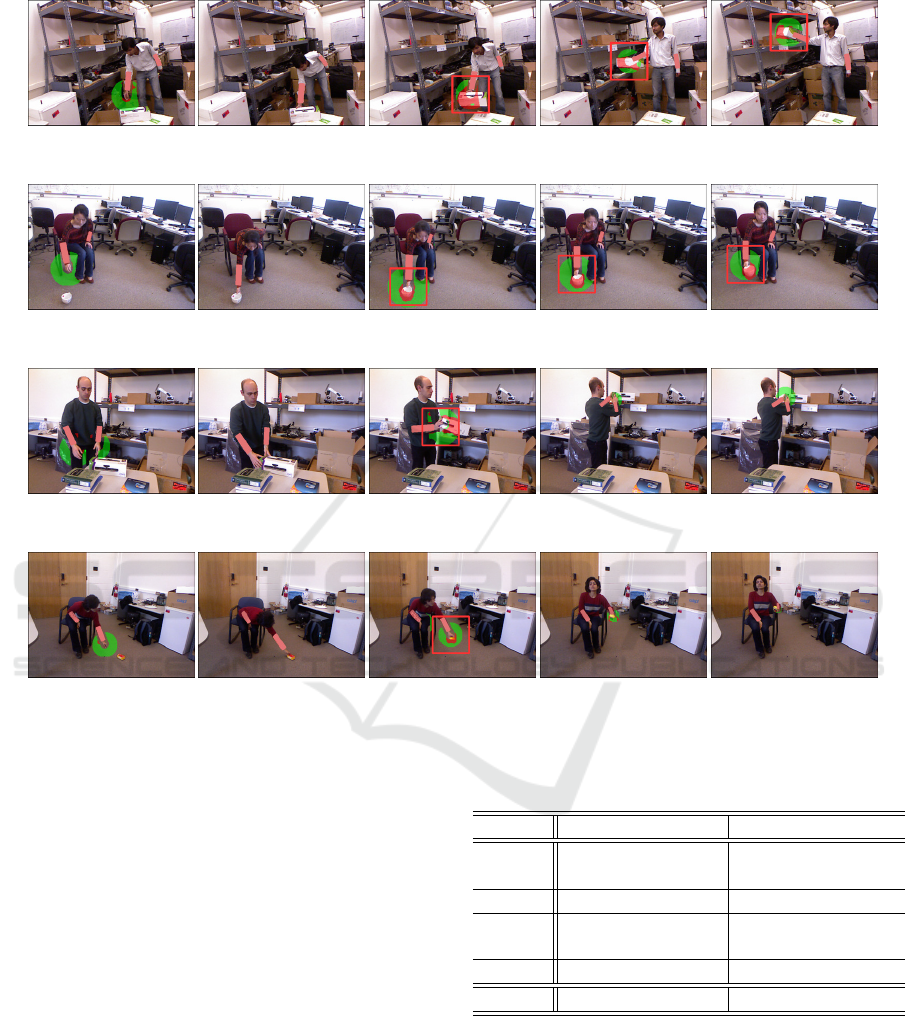
(a) Group (a) example (“arranging objects” category, the right hand moves an object from frame 131 to 230).
frame 60 frame 110 frame 140 frame 180 frame 210
(b) Group (b) example (“picking objects” category, the right hand moves an object from frame 83 to 131).
frame 49 frame 75 frame 86 frame 95 frame 99
(c) Group (c) example (“arranging objects” category, the both hands move an object from frame 80 to 180).
frame 35 frame 61 frame 110 frame 171 frame 180
(d) Group (d) example (“picking objects” category, the left hand moves an object from frame 163 to 220).
frame 70 frame 110 frame 174 frame 186 frame 191
Figure 6: Examples of experimental results on each video image group.
than by the size of a moved object. The reason why
the higher F-measure is attained for Groups (a), (b)
than for Groups (c), (d) is because the optical flow of a
movement parallel to the image plane can be obtained
more accurately than that of a movement perpendicu-
lar to the image plane. The errors in estimating opti-
cal flow cause the decision errors by Eqs. (1), (9), and
(10), which lead to failures in detecting human-object
interaction. The examples of such detection failures
can be seen in Figure 6 (c) and (d), i.e. False Neg-
atives in frames 171, 180 of Group (c) example and
frames 186, 191 of Group (d) example.
The detection accuracy excluding False Negatives
and Positives due to hand extraction failures by Open-
Pose is listed in Table 3. From these results, the same
tendency as Table 2 in F-measure can be seen. Com-
pared to the results in Table 2, F-measure in Table 3
increases for each group, especially for Group (c)
(F = 0.57 in Table 2 and F = 0.64 in Table 3). The
reason for this is that the forearm skeletons cannot be
Table 2: Detection accuracy (including False Negatives and
Positives due to hand extraction failures by OpenPose).
Group T P FN FP R P F
(a) 556 107 59 0.84 0.90 0.87
(b) 309 67 51 0.82 0.86 0.84
(a)+(b) 865 174 110 0.83 0.89 0.86
(c) 502 499 282 0.50 0.64 0.56
(d) 150 192 170 0.44 0.47 0.45
(c)+(d) 652 691 452 0.49 0.59 0.53
Total 1517 865 562 0.64 0.73 0.68
extracted correctly by OpenPose in many frames in
video images of Group (c). As shown in Figure 6 (c),
a person moves an object roughly perpendicular to the
image plane with his/her both hands in each video
image of Group (c). Consequently, one forearm is
likely to be occluded by the other forearm, and then
the skeleton of the occluded forearm is not extracted
by OpenPose. The example of such forearm extrac-
A Method for Detecting Human-object Interaction based on Motion Distribution around Hand
467

(a) A person moves a chair behind the other persons from the left side to the right side in a scene.
frame 70 frame 130 frame 163 frame 205 frame 255
(b) A person moves a daypack behind the other persons from the left side to the right side in a scene.
frame 100 frame 148 frame 161 frame 178 frame 280
(c) One side person hands a paper bag to the other side person in a scene.
frame 141 frame 180 frame 215 frame 250 frame 280
(d) One person takes an umbrella from the other person in a scene.
frame 87 frame 120 frame 143 frame 195 frame 216
Figure 7: Detection result examples of additional experiments on several different scenes.
Table 3: Detection accuracy (excluding False Negatives and
Positives due to hand extraction failures by OpenPose).
Group T P FN FP R P F
(a) 556 76 49 0.88 0.92 0.90
(b) 309 56 51 0.85 0.86 0.85
(a)+(b) 865 132 100 0.87 0.90 0.88
(c) 502 429 154 0.54 0.77 0.63
(d) 150 166 166 0.47 0.47 0.47
(c)+(d) 652 595 320 0.52 0.67 0.59
Total 1517 727 420 0.68 0.78 0.73
tion failure can be seen in Figure 6 (c), i.e. the left
forearm occluded by the right forearm is not extracted
in frame 110 of Group (c) example.
These experimental results indicate that the pro-
posed method is effective for detecting human-object
interaction in the situation where a hand moves a rela-
tively large object roughly parallel to the image plane.
4.3 Additional Experiments
We conducted additional experiments on video im-
ages of several different scenes. Figure 7 shows ex-
ample frames in these video images (640×480pixels,
30fps) and detection results. In scenes (a) and (b), a
person moves an object (chair or daypack) behind the
other persons from the left side to the right side in the
scene. In scenes (c) and (d), one person hands a paper
bag to the other and takes an umbrella from the other,
respectively.
As can be seen from scenes (a) and (b) in Figure 7,
the proposed method detects a person hand which is in
the middle of moving of an object even though the ob-
ject or the person body is occluded partially (frames
130, 163, 205 of scene (a) and frames 161, 178 of
scene (b)). This is because the proposed method can
work if a moving forearm and a moving object are
visible in a certain extent of each part (it is not nec-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
468

essarily that the entire regions of person body and ob-
ject are visible). As can be seen from scenes (c) and
(d) in Figure 7, when an object is hold by one per-
son’s hand after another, the proposed method detects
such human-object interaction individually and cor-
rectly (frames 180, 250 of scene (c) and frames 143,
195 of scene (d)).
These experiment results shows the effectiveness
of the proposed method in detecting human-object in-
teraction for diverse situations.
5 CONCLUSIONS
In this paper, we have focused on the type of human-
object interaction where a person is in the middle of
moving an object with his/her hand, and proposed a
novel method for detecting such type of human-object
interaction by the motion distribution in an individual
area surrounding each hand. Since our method needs
not explicitly extract object regions from input im-
ages and recognize their correspondence to person re-
gions, the effectiveness in detecting the human-object
interaction is expected to be improved for diverse sit-
uations. Through the experiments on human activity
video images, we confirmed the effectiveness of our
proposed method in the situations where a person is
right in the middle of moving a relatively large object
roughly parallel to the image plane.
We will conduct further experiments on a variety
of environments such as the different angles of cam-
eras, the various types of objects, the different num-
bers of persons, and the diverse conditions of occlu-
sion areas. Currently, our proposed method achieves
several decision processes as thresholding procedures
by Eqs. (1), (9), and (10). We would like to investigate
approaches for achieving these processes as machine
learning based procedures.
In future work, we plan to extend our proposed
method to multiple camera environment. This is be-
cause, we can expect to deal with the decrease in in-
teraction detection accuracy from unsuitable image
condition by the following approach: several images
of the same person are taken from different angles,
unsuitable condition images, where his/her hand is
hard to detect, overlaps considerably with other body
part regions, or moves roughly perpendicular to the
image plane, are excluded from the taken images, and
human-object interaction is detected by using the re-
maining images.
REFERENCES
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017).
Realtime multi-person 2D pose estimation using part
affinity fields. In IEEE Conf. Comput. Vision Pattern
Recognit., pages 1302–1310.
Chao, Y.-W., Wang, Z., He, Y., Wang, J., and Deng, J.
(2015). HICO: A benchmark for recognizing human-
object interactions in images. In Int. Conf. Comput.
Vision, pages 1017–1025.
Drillis, R., Contini, R., and Bluestein, M. (1964). Body
segment parameters: A survey of measurement tech-
niques. Artif. Limbs, 8(1):44–66.
Ghuge, N. and Dhulekar, P. (2017). Abandoned object
detection. Int. J. Mod. Trends Sci.ence Technol.,
3(6):215–218.
Koppula, H. S., Gupta, R., and Saxena, A. (2013). Learn-
ing human activities and object affordances from rgb-
d videos. Int. J. Rob. Res., 32(8):951–970.
Kroeger, T., Timofte, R., Dai, D., and Gool, L. V. (2016).
Fast optical flow using dense inverse search. In Eur.
Conf. Comput. Vision, pages 471–488.
Le, D.-T., Uijlings, J., and Bernardi, R. (2014). TUHOI:
Trento universal human object interaction dataset. In
The 3rd Workshop Vision Lang., pages 17–24.
Leo, M., Mosca, N., Spagnolo, P., Mazzeo, P. L., D’Orazio,
T., and Distante, A. (2008). Real-time multiview anal-
ysis of soccer matches for understanding interactions
between ball and players. In Int. Conf. Content-Based
Image Video Retrieval, pages 525–534.
Liciotti, D., Contigiani, M., Frontoni, E., Mancini, A., Zin-
garetti, P., and Placidi, V. (2014). Shopper analytics:
A customer activity recognition system using a dis-
tributed rgb-d camera network. In Int. Workshop Video
Anal. Audience Meas. Retail Digital Signage, pages
146–157.
Lin, K., Chen, S.-C., Chen, C.-S., Lin, D.-T., and Hung,
Y.-P. (2015). Abandoned object detection via tempo-
ral consistency modeling and back-tracing verification
for visual surveillance. IEEE Trans. Inf. Forensics Se-
curity, 10(7):1359–1370.
Meng, M., Drira, H., and Boonaert, J. (2018). Distances
evolution analysis for online and off-line human ob-
ject interaction recognition. Image Vision Comput.,
70:32–45.
Mitsuhashi, Y., Abe, T., and Suganuma, T. (2014). A detec-
tion method of human-object interactions in crowded
environment based on hierarchical image analysis.
Tech. Rep. IEICE, 114(PRMU2014-77):69–74.
Roy, D. and Chalavadi, K. M. (2018). Snatch theft detec-
tion in unconstrained surveillance videos using action
attribute modelling. Pattern Recognit. Lett., 108:56–
61.
Shih, H.-C. (2018). A survey of content-aware video anal-
ysis for sports. IEEE Trans. Circuits Syst. Video Tech-
nol., 28(5):1212–1231.
Ubalde, S., Liu, Z., and Mejail, M. (2014). Detecting sub-
tle human-object interactions using Kinect. In 19th
Iberoam. Congr. Pattern Recognit., pages 770–777.
Zhang, H.-B., Zhang, Y.-X., Zhong, B., Lei, Q., Yang, L.,
Du, J.-X., and Chen, D.-S. (2019). A comprehen-
sive survey of vision-based human action recognition
methods. Sensors, 19(5):1005.
A Method for Detecting Human-object Interaction based on Motion Distribution around Hand
469
