
SOANets: Encoder-decoder based Skeleton Orientation Alignment
Network for White Cane User Recognition from 2D Human Skeleton
Sequence
Naoki Nishida
1
, Yasutomo Kawanishi
1
, Daisuke Deguchi
2
, Ichiro Ide
1
, Hiroshi Murase
1
and Jun Piao
3
1
Graduate School of Informatics, Nagoya University, Aichi, Japan
2
Information Strategy Office, Nagoya University, Aichi, Japan
3
Data Science Research Laboratories, NEC Corporation, Kanagawa, Japan
{ide, murase}@i.nagoya-u.ac.jp, j-piao@cw.jp.nec.com
Keywords:
Skeleton Orientation Alignment, Skeleton Representation Sequence, White Cane User Recognition.
Abstract:
Recently, various facilities have been deployed to support visually impaired people. However, accidents caused
by visual disabilities still occur. In this paper, to support the visually impaired people in public areas, we aim
to identify the presence of a white cane user from a surveillance camera by analyzing the temporal transition
of a human skeleton in a pedestrian image sequence represented as 2D coordinates. Our previously proposed
method aligns the orientation of the skeletons to various orientations and identifies a white cane user from
the corresponding sequences, relying on multiple classifiers related to each orientation. The method employs
an exemplar-based approach to perform the alignment, and heavily depends on the number of exemplars
and consumes excessive memory. In this paper, we propose a method to align 2D skeleton representation
sequences to various orientations using the proposed Skeleton Orientation Alignment Networks (SOANets)
based on an encoder-decoder model. Using SOANets, we can obtain 2D skeleton representation sequences
aligned to various orientations, extract richer skeleton features, and recognize white cane users accurately.
Results of an evaluation experiment shows that the proposed method improves the recognition rate by 16%,
compared to the previous exemplar-based method.
1 INTRODUCTION
In recent years, various kinds of facilities have been
deployed to support visually impaired people. There-
fore, they have become able to go out on their
own actively. For example, braille blocks can be
found around cities and public facilities to guide vi-
sually impaired people (e.g. low-vision and partially
sighted). However, accidents involving them still oc-
cur, such as, falling on a railway track from a station
platform. To prevent such accidents, platform screen
doors are installed at stations. However, as their in-
stallation is limited to major stations, social support
is still necessary to prevent accidents.
Therefore, necessity to identify visually impaired
people in the public space is increasing. Information
from surveillance cameras installed in public places
can be used for this purpose. For example, Tanikawa
et al. proposed a method to automatically recog-
nize and track wheelchair users in security camera
footages (Tanikawa et al., 2017), and then to notify
personnel to support them promptly.
Usually, it is not necessary to provide sighted peo-
ple with notifications intended for visually impaired
people. Therefore, it is essential to distinguish sighted
and visually impaired people to provide support only
for the latter.
Visually impaired people usually employ a white
cane to search for obstacles. It also serves as a
medium that helps other people recognize their im-
pairment. Therefore, a white cane detector can be
used to identify visually impaired people in images
from surveillance cameras. However, even state-of-
the-art object detectors (He et al., 2017; Redmon
and Farhadi, 2018; Cai and Vasconcelos, 2018) may
mis-detect objects with appearances similar to a white
cane, such as a white umbrella.
To overcome this issue, it is preferable to recog-
nize them not only by the presence of a white cane,
but also by unique actions peculiar to persons walk-
Nishida, N., Kawanishi, Y., Deguchi, D., Ide, I., Murase, H. and Piao, J.
SOANets: Encoder-decoder based Skeleton Orientation Alignment Network for White Cane User Recognition from 2D Human Skeleton Sequence.
DOI: 10.5220/0008988204350443
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
435-443
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
435

Figure 1: Walking actions of a white cane user and a sighted
person. The difference is mainly seen in the movement of
their arms. The sighted person swings his arms back and
forth. In contrast, the arm of the white cane user holding
his cane is fixed forward.
ing with a white cane. It is evident that there are dif-
ferences between the actions of a white cane user and
a sighted person as shown in Figure 1. Therefore, in
this paper, we focus on recognizing a white cane user
analyzing only the motions typical to pedestrians.
Various studies have been performed to propose
an efficient way to recognize actions of human skele-
tons (Le et al., 2018; Baptista et al., 2019; Wang et al.,
2016). As it is difficult to create a 3D representation
of a skeleton using the data from a monocular camera,
a sequence of 2D skeleton representations is usually
considered for estimating human actions. However,
as the appearance of a 2D skeleton varies widely ac-
cording to the skeleton’s orientation as shown in Fig-
ure 2, the performance of action recognition may be
deteriorated depending on the orientation. Therefore,
it is desirable to align a skeleton orientation in the in-
put for a white cane user recognition to a specific ori-
entation. However, since there may be several orien-
tations that work effectively for user recognition, not
only a single orientation but also several orientations
combined together can be effective. Hence, to achieve
more accurate recognition, it is required to obtain sev-
eral human skeleton representation sequences aligned
to different orientations.
We have previously proposed a skeleton orienta-
tion alignment method based on exemplar-based 2D
skeletons for white cane user recognition (Nishida
et al., 2019). We prepared a database with 2D skele-
tons in various orientations and aligned the input
2D skeletons to various orientations by finding suit-
able skeletons in this database. The performance
of the method depended on the number of skele-
ton exemplars contained in the database. Using this
method, slightly different skeletons could be con-
verted to the same skeleton, as the dictionary is dis-
crete. Therefore, unnatural skeleton representation
sequences could be generated.
To tackle this problem, we propose an encoder-
decoder model named Skeleton Orientation Align-
ment Networks (SOANets) for skeleton orientation
alignment, as an alternative to the above exemplar-
based approach. Each SOANet corresponding to a
target orientation aligns an arbitrary orientation of an
Front
Right
Left
Human skeletons depending on skeleton’s orientations
Figure 2: Difference in skeletons depending on their orien-
tations.
input 2D skeleton representation to the target orien-
tation. As a result, we can obtain skeletons in mul-
tiple orientations corresponding to a single input 2D
skeleton. Unlike in the exemplar-based approach, we
can obtain a continuous skeleton representation and
achieve natural skeleton representation sequences ow-
ing to the fact that a skeleton representation is re-
gressed directly by SOANets.
The process of recognizing a white cane user is
similar to that of the exemplar-based approach. By
using aligned skeleton representation sequences ob-
tained through SOANets, identification of whether
each skeleton representation sequence corresponds to
a white cane user or not is performed for all orien-
tations independently. Finally, a classification result
is obtained by applying weight to the classification
results corresponding to each orientation of the con-
sidered input skeleton representation sequences and
aggregating the classification results.
Contributions of the present paper are summarized
as follows:
• We introduce SOANets based on an encoder-
decoder model to align an orientation of a 2D
skeleton representation to multiple orientations.
As the proposed method can output a skeleton rep-
resentation in a form of continuous sequence, the
output will be much natural than that of our previ-
ously proposed exemplar-based approach.
• We achieve more accurate classification of white
cane users by replacing the skeleton orientation
alignment of the exemplar-based approach with
the proposed SOANets.
• Through performance evaluation using the images
collected in several real environments, we demon-
strate that the proposed method achieves the high-
est accuracy for white cane user recognition.
The rest of this paper is organized as follows. In sec-
tion 2, we describe related research works. In section
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
436

3, we present the proposed method to classify pedes-
trian’s 2D skeleton representation sequences by the
orientation alignment of a 2D skeleton representation
sequence. In section 4, we describe the conducted ex-
periments and discuss their results. In section 5, we
conclude this paper and discuss the future directions.
2 RELATED WORK
Considering the task of human action recognition, it
is necessary to extract the temporal transition of hu-
man features. To address this, Recurrent Neural Net-
work (RNN) is often used to recognize continuous se-
quences such as sentences and videos. In particular,
Long Short-Term Memory (LSTM) (Hochreiter and
Schmidhuber, 1997), a type of RNN, is employed to
handle long-term sequences, and methods based on
this approach have achieved high accuracy for action
recognition (Sun et al., 2017; Si et al., 2019).
Recently, representation of human skeletons is
often used as a feature to recognize human ac-
tions. Convolutional pose machine (Wei et al., 2016)
and OpenPose (Cao et al., 2017) are mentioned as
well-known methods for human skeleton estimation.
These methods are used to estimate 2D coordinates of
each body joint that composes a human body by the
Convolutional Neural Network (CNN).
It is desirable that a skeleton is represented in 3D
rather than in 2D, as a 2D skeleton greatly differs
depending on the skeleton’s orientation. Therefore,
some researchers have used a 3D skeleton for action
recognition (Le et al., 2018; Baptista et al., 2019;
Wang et al., 2016). However, in these research works,
3D skeletons are prepared in advance or are estimated
based on images captured from multiple cameras. In
a real scene, as it is difficult to install multiple cam-
eras for capturing people simultaneously everywhere,
it is more efficient if a skeleton is estimated from a
single image. Recently, a method to estimate a 3D
skeleton from a 2D skeleton was proposed (Martinez
et al., 2016), but it is still inaccurate.
To realize recognition of human actions, we have
proposed a 2D skeleton orientation alignment method
by an exemplar-based method (Nishida et al., 2019).
The alignment is performed by obtaining skeleton
representations from the skeleton database prepared
in advance. Using the skeleton orientation alignment,
richer features of a 2D skeleton with various orienta-
tions can be obtained compared to methods based on
a single skeleton orientation.
3 WHITE CANE USER
RECOGNITION FROM
VARIOUS ORIENTATIONS BY
SOANets
When recognizing a white cane user based on a skele-
ton representation sequence, there is a problem that
the appearance of a skeleton greatly varies depend-
ing on the skeleton’s orientation. To address this
problem, we basically follow the framework pro-
posed in our previously proposed exemplar-based
method (Nishida et al., 2019). However, this method
has a deficiency in the skeleton alignment process, as
described in the previous section. To overcome this
deficiency, we propose the SOANets method regress-
ing the orientation-aligned 2D skeleton instead of per-
forming exemplar-based skeleton orientation align-
ment.
The procedure of the white cane user recogni-
tion framework is shown in Figure 3 (The part pro-
posed in this paper is indicated by a double-lined
box). First, a pedestrian image sequence is used as
an input, and 1) the skeleton of the pedestrian in each
frame is estimated. Then, 2) for each frame, 2D
skeleton representation sequences with various orien-
tations are obtained from the 2D skeletons by the pro-
posed SOANets. Finally, 3) the aligned 2D skeleton
representation sequences are classified by a classifier
corresponding to their orientation, and the results are
integrated to output the final decision for the input se-
quence.
Here, we propose the SOANets procedure dis-
cussed in point 2). In this method, we align the orien-
tation of a 2D skeleton to various orientations. We
use an encoder-decoder model for a target orienta-
tion to align an input 2D skeleton. Each SOANet
regresses the 2D skeleton aligned to a certain ori-
entation. We obtain 2D skeletons of various orien-
tations by encoder-decoder models corresponding to
each orientation. The collection of these encoder-
decoder models are named as SOANets.
Details of each procedure is presented in the rest
of this section.
3.1 Skeleton Estimation of a Pedestrian
We define a human skeleton using a set of 2D coor-
dinates of body joints such as wrists, elbows, knees,
etc. Assuming that the number of body joint points
is J, a 2D skeleton with a certain orientation can be
represented as p ∈ R
2J
. Here, a 2D skeleton of the n-
th frame in a pedestrian image sequence is estimated
as p
n
= (x
1
n
,y
1
n
,...,x
j
n
,y
j
n
,...,x
J
n
,y
J
n
)
T
, x
j
n
,y
j
n
∈ R. The
SOANets: Encoder-decoder based Skeleton Orientation Alignment Network for White Cane User Recognition from 2D Human Skeleton
Sequence
437

L
S
T
M
2
Pedestrian
image sequence
White-cane user or not
Skeleton estimation of
a pedestrian
C
lassification of the pedestrian sequence
by selected classifiers
Skeleton orientation
alignment by SOANets
2.
1.
Skeleton
sequence
Aligned skeleton
sequences
3.
Front
Right
Left
L
S
T
M
1
Aggregation of the outputs
L
S
T
M
3
L
S
T
M
4
L
S
T
M
5
L
S
T
M
6
L
S
T
M
7
L
S
T
M
8
Figure 3: Procedure of the white cane user recognition fol-
lowing the exemplar-based approach. The double-lined box
indicates the part proposed in the present paper.
sequence I = {I
1
,...,I
n
,...,I
N
} consists of N color
images obtained by tracking pedestrians, whose size
is w × h [pixels].
We use OpenPose (Cao et al., 2017) for 2D skele-
ton estimation. For each frame I
n
, the method esti-
mates heat maps indicating probabilities of all body
joints, and part affinity fields indicating the connec-
tion between each body joint pair. These maps and
image features are used as input, and a 2D skeleton
representation p
n
and its probability o
n
are the output.
From the estimated 2D skeleton representation se-
quence P = {p
n
}
N
n=1
, we construct a 2D skeleton rep-
resentation sequence S as the input for the next pro-
cess (Skeleton orientation alignment). Here, we elim-
inate the frames of low-confident estimations, and
construct S from P as follows:
S = {p
n
|∀n,o
n
≤ τ}, (1)
where o
n
is the probability of p
n
. For the estimated
coordinates (x
j
q
,y
j
q
) of each body joint, their value
range is normalized as follows:
x
0
j
q
=
x
j
q
− min
i
(x
i
q
)
max
i
(x
i
q
) − min
i
(x
i
q
)
θ
x
, (2)
y
0
j
q
=
y
j
q
− min
i
(y
i
q
)
max
i
(y
i
q
) − min
i
(y
i
q
)
θ
y
, (3)
where θ
x
and θ
y
are the constants to adjust the width
and height of a skeleton. Examples of the estimated
2D skeletons are shown in Figure 4.
Figure 4: Examples of estimated 2D skeletons.
In addition, we expand body joint coordinates
p
n
and skeleton representation sequence S to clarify
whether the coordinates of body joints can be esti-
mated:
p
0
n
= (x
0
1
n
,y
0
1
n
, f
1
n
,...,x
0
j
n
,y
0
j
n
, f
j
n
,...,x
0
J
n
,y
0
J
n
, f
J
n
), (4)
S
0
= {p
0
n
|∀n,o
n
≤ τ}, (5)
f
j
n
=
1 (Success f ully detected)
0 (Misdetected)
(6)
3.2 Skeleton Orientation Alignment
using SOANets
Using SOANets, a 2D skeleton representation p
0
n
is
transformed to a set of 2D skeleton representations
{
˜
p
nd
}
D
d=1
viewed from D different orientations. Here,
the function T (p
0
n
) performing this transformation is
defined as follows:
T (p
0
n
) = {
˜
p
n1
,...,
˜
p
nd
,...,
˜
p
nD
}, (7)
We perform the skeleton orientation alignment
by encoder-decoder models. Each encoder-decoder
model transforms an input 2D skeleton into an ar-
bitrary orientation to the aligned 2D skeleton repre-
sentation in a specific orientation as shown in Fig-
ure 5. This set of encoder-decoder networks is used
to regress the 2D skeleton that is aligned to the in-
put skeleton orientation. We can obtain skeletons in
various orientations from a single input skeleton as
shown in Figure 6. All encoder-decoder models have
the same architecture as presented in Figure 7. The
collection of these the encoder-decoder models are
named as SOANets. The function T
d
(p
0
n
) consists of
several SOANets, and each SOANet is defined as fol-
lows:
T
d
(p
0
n
) = Decoder
d
(Encoder
d
(p
0
n
)) =
˜
p
nd
. (8)
Therefore, T (p
0
n
) also can be defined as follows:
T (p
0
n
) = {T
1
(p
0
n
),...,T
d
(p
0
n
),...,T
D
(p
0
n
)}. (9)
Next, we describe the details on inputs and outputs
of SOANets. To realize the skeleton orientation align-
ment from input skeletons in various orientations, we
prepare 2D skeletons in D orientations as the training
input.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
438
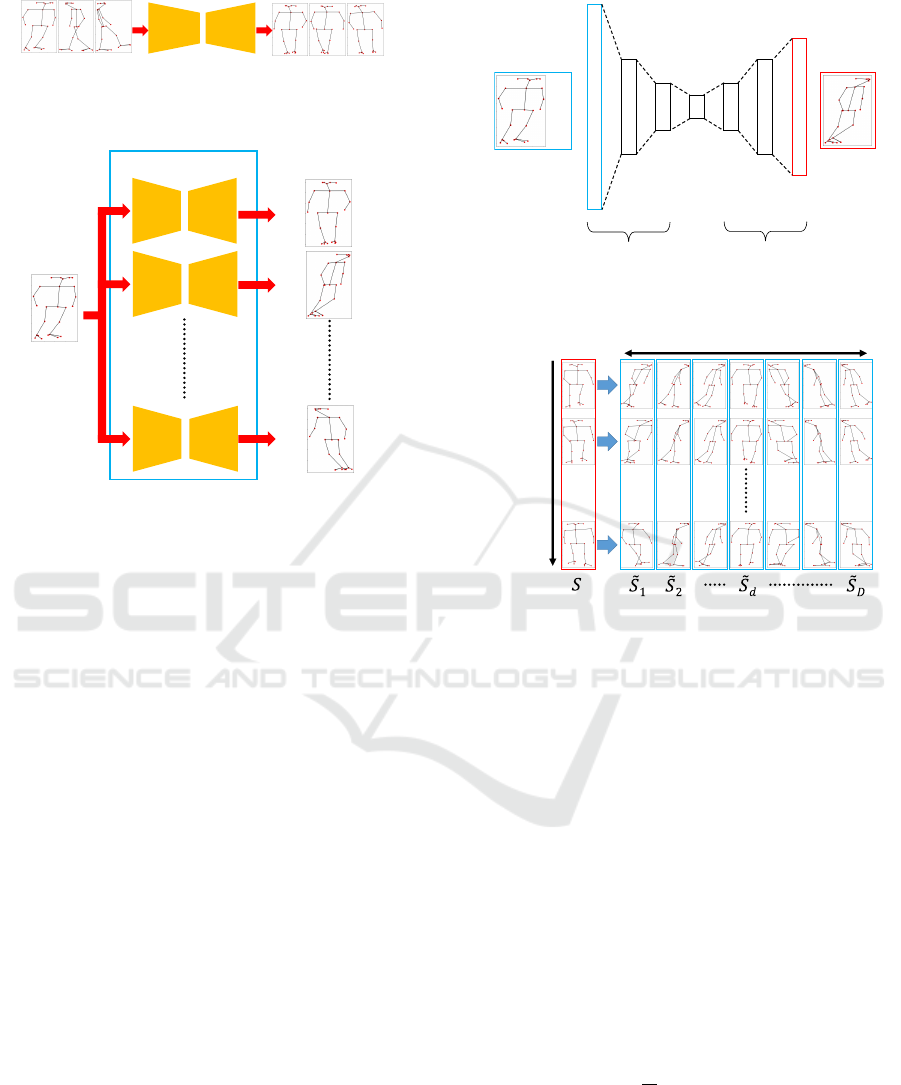
Inputs
Aligned skeletons
Encoder
Decoder
SOA Net
Figure 5: Skeletons in any orientation is aligned to a single
orientation using SOANet.
Encoder
1
Decoder
1
Input
Aligned skeletons
SOANets
Encoder
2
Encoder
D
Decoder
2
Decoder
D
Figure 6: Skeleton orientation alignment using SOANets.
It is difficult to obtain a representation of the body
joints of a skeleton due to occlusion, distance from
cameras, etc. Therefore, misdetection of some body
joints affects not only the skeleton orientation align-
ment, but also classification using aligned skeleton
representation sequences. To solve this issue, we use
skeleton representations with missing values of body
joint coordinates as the input, and the complete skele-
ton representations as the output.
Using the training data, SOANets are trained
to regress the complete 2D skeleton representation
˜
p
nd
= ( ˜x
1
nd
, ˜y
1
nd
,..., ˜x
J
nd
, ˜y
J
nd
) in the aligned orientation
d from an input skeleton representation sequence p
0
n
∈
R
3J
. As all missing values corresponding to body
joints are supposed to be restored, f
j
n
indicating the
existence of the missing value of body joints is ex-
cluded from
˜
p
n
∈ R
2J
.
Finally, orientations of all 2D skeletons in the in-
put skeleton representation sequence S
0
∈ R
3JN
are
aligned by SOANets. The aligned skeleton represen-
tation sequences {
e
S
d
}
D
d=1
to D orientations are de-
noted as follows:
{
e
S
d
}
D
d=1
= {(
˜
p
1d
,...,
˜
p
nd
,...,
˜
p
Nd
)}
D
d=1
. (10)
Each
e
S
d
is used as the input for classification to
identify, whether a pedestrian is a white cane user or
not. An example of aligned 2D skeletons obtained by
the proposed SOANets from an input 2D skeleton is
shown in Figure 8.
Fully connected layer
75
32
16
8
32
16
50
݂
ൌ
Input
ൌ
Output
Encoder
Decoder
Figure 7: Encoder-decoder architecture of each SOANet.
Frames
Orientations
Skeleton
sequence
͛
Figure 8: Examples of aligned 2D pseudo-skeletons.
3.3 Classification of a Pedestrian
Sequence
Each 2D skeleton representation sequence
e
S
d
ob-
tained by SOANets is classified, whether it corre-
sponds to a white cane user or not according to
the classifier corresponding to each skeleton orien-
tation. We prepare D individual classifiers C =
{C
1
,...,C
d
,...,C
D
} for D different skeleton orienta-
tions obtained using the methods based on LSTM net-
work and the exemplar-based approach.
Following the exemplar-based approach, all clas-
sification scores of each class (a white cane user or
a sighted person) are weighted and integrated as fol-
lows:
g
`
(
e
S ) =
1
D
D
∑
d=1
w
d
g
`
d
(
e
S ), (11)
w
d
=
1 a(C
d
) ≥ δ,
0 a(C
d
) < δ,
, (12)
where g
`
(
e
S ) is the integrated classification score of
class `; g
`
d
(
e
S ) is the classification score of C
d
; w
d
is
SOANets: Encoder-decoder based Skeleton Orientation Alignment Network for White Cane User Recognition from 2D Human Skeleton
Sequence
439

the weight for g
`
d
(
e
S ) of all classes; a(C
d
) is the accu-
racy of the classifier C
d
for the training dataset; and
δ is a threshold. Finally, the class
˜
` = argmax
`
g
`
(
e
S )
with the highest score is output as the classification
result.
4 EVALUATION
In this section, we introduce two experiments: 1)
evaluation of the skeleton orientation alignment per-
formed by SOANets, and 2) confirmation of the ef-
fectiveness of the proposed method in terms of pedes-
trian classification.
4.1 Dataset for Training SOANets
For training SOANets, we captured images of pedes-
trians using three calibrated cameras. We captured
the data at one specific location, and the same partici-
pant performed both the roles of a sighted and a visu-
ally impaired person. We estimated their 3D poses
by OpenPose and obtained M (= 4, 616) complete
3D skeleton representations. The skeleton’s orienta-
tion that faces the front is labeled as 0
◦
, and the other
orientations are set by rotating the skeleton counter-
clockwise with the step of 10
◦
around the vertical
axis. As a result, using a 3D skeleton representation,
D (= 36) sets of 2D complete skeletons in D orienta-
tions are obtained. Finally, training data for SOANets
is composed of MD (= 166,176) 2D complete skele-
ton representations.
4.2 Dataset for Classification
For training and testing data, we prepared a dataset
by capturing sequences of several walking white cane
users and sighted pedestrians in the same manner as
in our previous study (Nishida et al., 2019). In the ex-
periment, seventeen sighted participants played both
roles, and five visually impaired people also partici-
pated as white cane users. The sequences were cap-
tured at five different locations including both indoors
and outdoors. We composed pedestrian sequences by
selecting frames where pedestrians existed, resulting
in 266 pedestrian sequences. The details of the pre-
pared dataset are summarized in Table 1, and exam-
ples of the images at each location are presented in
Figure 9.
Table 1: Number of pedestrian image sequences in the
dataset.
Location 1 2 3 4 5 All
#White-cane user 23 12 12 10 76 133
#Non user 26 6 25 0 76 133
#All sequences 49 18 37 10 152 266
1
5
43
2
Figure 9: Examples of images at each location.
4.3 Experiment 1: Evaluation of the
Skeleton Orientation Alignment
4.3.1 Settings
In this experiment, we evaluate the performance
of the skeleton orientation alignment by SOANets.
As a metric for evaluation we use Root Mean
Squared Error (RMSE) computed from sets of E
aligned skeletons {p
a`
e
= (x
a`
e1
,y
a`
e1
,...,x
a`
eJ
,y
a`
eJ
)} and
E corresponding ground-truth skeletons {p
GT
e
=
(x
GT
e
1
,y
GT
e
1
,...,x
GT
e
J
,y
GT
e
J
)}. Here, RMSE is defined as
follows:
RMSE =
1
E
E
∑
e=1
v
u
u
t
1
J
J
∑
j=1
{(x
GT
e
j
− x
a`
e
j
)
2
+ (y
GT
e
j
− y
a`
e
j
)
2
}
(13)
We considered two to five random body joints
from the input skeleton as the misdetected body
joints. This pseudo-misdetection is applied iteratively
ten times for each input to augment the data. There-
fore, the number of skeleton data for SOANets is
10MD (= 1,661,760), where 1,600,000 skeletons are
used for training, and 61,760 skeletons are used for
testing.
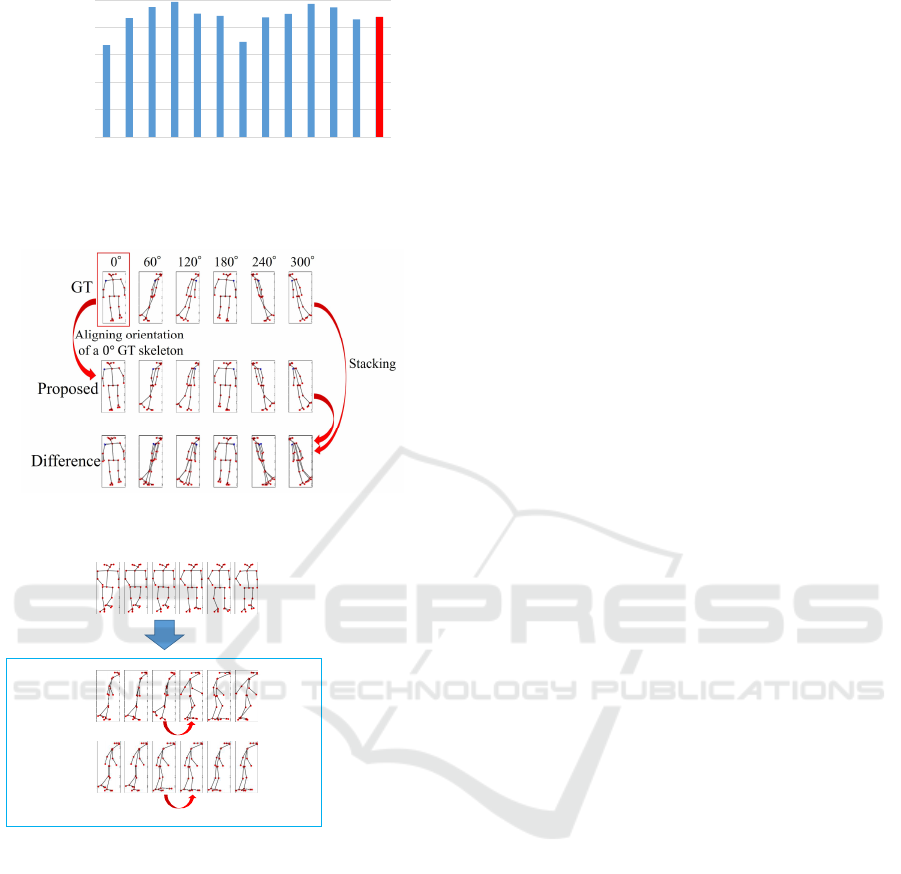
4.3.2 Result
The results of applying the proposed method based
on SOANets for all considered aligned skeleton ori-
entations are shown in Figure 10. Examples of the
skeleton orientation alignment using SOANets are
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
440
Ϭ
Ϭ͘Ϭϭ
Ϭ͘ϬϮ
Ϭ͘Ϭϯ
Ϭ͘Ϭϰ
Ϭ͘Ϭϱ
Ϭ͘Ϭϲ
Ϭ ϯϬ ϲϬ ϵϬ ϭϮϬ ϭϱϬ ϭϴϬ ϮϭϬ ϮϰϬ ϮϳϬ ϯϬϬ ϯϯϬ ϯϲϬ
RMSE
Skeleton orientations after alignment
ave
Figure 10: Results of the skeleton orientation alignment
evaluation.
Figure 11: Examples of the skeleton orientation alignment.
Input
Sequence
Exemplar
based
SOANets
1 2 6543
Unnatural transition
Smooth transition
Aligning to 90° (right orientation)
Figure 12: Examples of the skeleton orientation alignment
by the exemplar-based approach and SOANets (proposed).
presented in Figure 11, and comparison of the skele-
ton orientation alignment results by SOANets and the
exemplar-based approach is shown in Figure 12.
4.3.3 Discussion
In this section, we discuss the results of the skeleton
orientation alignment. From Figure 10, we can see
that RMSE is the lowest when the aligned orienta-
tions are 0
◦
and 180
◦
corresponding to the front and
back orientations, respectively. In contrast, when the
aligned orientations are 90
◦
and 270
◦
corresponding
to right and left orientations, respectively, RMSE is
the highest. The depth of arm and leg body joints is
considered to be the cause of this difference of RMSE.
For a 2D skeleton in the front or back orientations,
it is difficult to estimate the depth of limbs. However,
for a 2D skeleton in the side orientation, the limbs
appear clearly. Therefore, we consider that the align-
ment error becomes larger due to the lack of informa-
tion on the limb depth, when a front or back skeleton
representation sequence is aligned to the side orien-
tation skeleton. As we can see in the bottom figure
of Figure 11, the error related to the limb joints is
larger than that of other joints. To address this prob-
lem, it is necessary to obtain information on the limb
depth from a front or back skeleton representation se-
quence. For example, we can consider the use of mul-
tiple frames for input of SOANets and to obtain more
features than a single frame.
From Figure 12, we can see that the aligned skele-
ton representations obtained using the previously pro-
posed exemplar-based method change greatly from
the third to the fourth frame. As it aligns the skele-
ton orientation by obtaining skeleton representations
from the database, this alignment is limited to the
number of skeleton patterns available in the database.
Therefore, in Figure 12, the exemplar-based approach
aligns the skeleton representation sequence with un-
natural transition. On the other hand, since the pro-
posed SOANets regress the aligned skeleton directly
from an input skeleton, it has no such limitation and
was able to align the skeleton orientation more natu-
rally.
4.4 Experiment 2: Evaluation of
Pedestrian Classification
4.4.1 Settings
In this experiment, we evaluate the accuracy of clas-
sifying pedestrian sequences.
For evaluation, the length of each 2D skeleton
representation sequence is set to 64 frames, and
each sequence is divided into overlapping five se-
quences, which is re-composed of 32 frames of the
input skeleton representation sequence with the step
of eight. The total number of skeleton representation
sequences (before applying the skeleton orientation
alignment) is 266 × 5 = 1, 330. The number of de-
tected body joints for each 2D skeleton is J = 25, and
the value range of coordinate values of body joints is
[−1.0, 1.0] in the horizontal and vertical directions
with θ
x
= 1.0 and θ
y
= 1.0. For evaluation, five-fold
cross-validation is performed on the dataset obtained
at each of five locations considered for evaluation, and
the dataset of other four locations is used for training
the SOANets.
To estimate the performance of the proposed
SOANets: Encoder-decoder based Skeleton Orientation Alignment Network for White Cane User Recognition from 2D Human Skeleton
Sequence
441
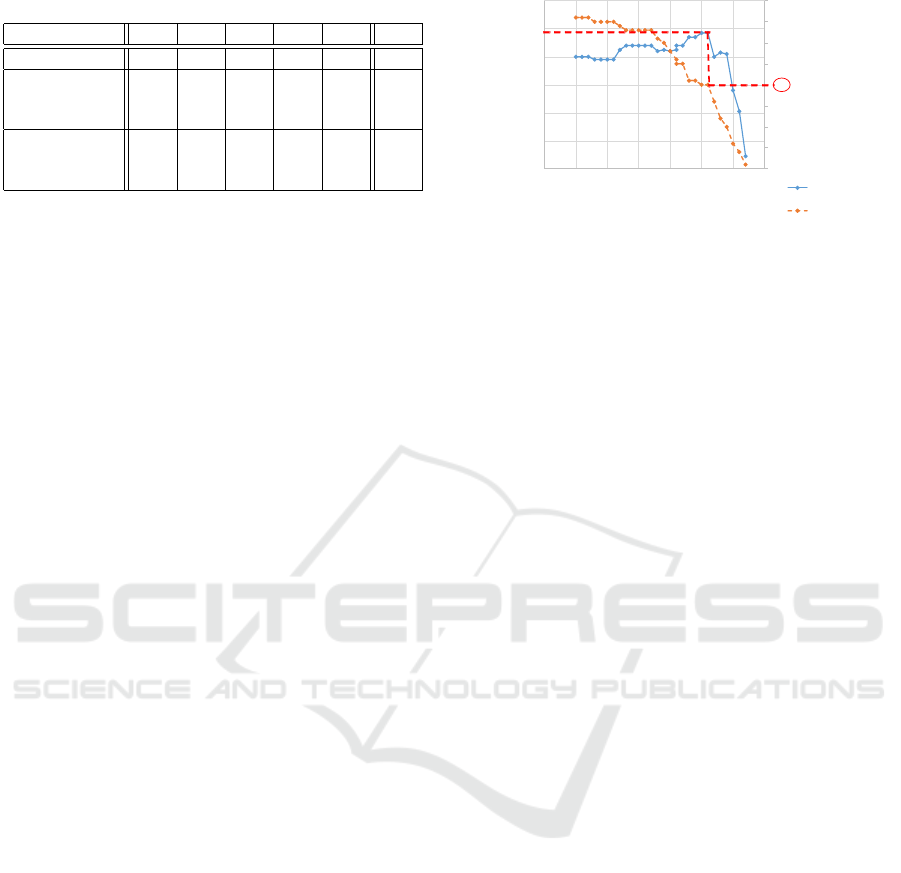
Table 2: Classification results.
Location 1 2 3 4 5 All
No alignment 0.82 0.70 0.55 0.53 0.64 0.66
Exemplar-based
No weighting 0.77 0.70 0.76 0.52 0.80 0.77
Weighting 0.80 0.69 0.75 0.50 0.81 0.78
SOANets
No weighting 0.85 0.84 0.68 0.64 0.82 0.80
Weighting(Ours) 0.87 0.90 0.71 0.70 0.82 0.82
method, we compare the accuracy of the following
five methods:
• No alignment of the skeleton’s orientation for an
input skeleton representation and using a single
classifier (No alignment).
• Aligning the skeleton’s orientation by the
exemplar-based approach and integrating
all results of classifiers without weighting
(Exemplar-based, No weighting).
• Aligning the skeleton’s orientation by the
exemplar-based approach and integrating all
results with weighting (Exemplar-based, Weight-
ing).
• Aligning the skeleton’s orientation by the
SOANets method and integrating all results
without weighting (SOANets, No weighting).
• Aligning the skeleton’s orientation by the
SOANets method and integrating all results with
weighting (Proposed: SOANets, Weighting).
4.4.2 Results
The results are summarized in Table 2. In this ta-
ble, “All” indicates the average of the results in all
considered locations weighted by the number of sam-
ples shown in Table 1. The accuracy of the pro-
posed method improved by 16% compared with the
method without the skeleton orientation alignment.
Moreover, the accuracy of the proposed method was
improved compared with the previously proposed
exemplar-based approach with and without weighting
considering each classifier. As a result, the effective-
ness of the proposed method was confirmed.
4.4.3 Discussion
Here, we discuss the experimental results. We fo-
cused on following two points : 1) locations, where
the data were captured, and 2) weighting of classi-
fiers.
First, we discuss the difference in the results in
terms of the locations, where the data were captured.
As shown in Table 2, for all the considered methods,
the accuracy at location 4 is relatively low. There
Ϭ
ϱ
ϭϬ
ϭϱ
ϮϬ
Ϯϱ
ϯϬ
ϯϱ
ϰϬ
Ϭ͘ϳϮ
Ϭ͘ϳϰ
Ϭ͘ϳϲ
Ϭ͘ϳϴ
Ϭ͘ϴϬ
Ϭ͘ϴϮ
Ϭ͘ϴϰ
Ϭ͘ϵϮ Ϭ͘ϵϯ Ϭ͘ϵϰ Ϭ͘ϵϱ Ϭ͘ϵϲ Ϭ͘ϵϳ Ϭ͘ϵϴ Ϭ͘ϵϵ
Number of classifiers
Accuracy
Thresholds for weighting
ིࣟ
ྪح਼
Accuracy
# Classifiers
Ϭ͘ϴϭϴ
Figure 13: Relation of the number of classifiers and the ac-
curacy.
are two possible reasons for this. One is that un-
like other locations, it contains only white cane users
and no pedestrians without white canes. The other is
that while capturing the data at location 4, the camera
position was relatively higher than that at other loca-
tions, and thereby, the tilt angle was different from the
others. Therefore, we consider that the classification
accuracy deteriorated due to the fact that skeleton pat-
terns were different from those at other locations. To
mitigate this problem, it is necessary to capture data
by changing the camera position, target location, and
subjects multiple times.
Second, we discuss applying different weights to
classifiers. Let us investigate changes in the num-
ber of classifiers used for evaluation (w
d
= 1) and the
corresponding accuracy based on the results provided
in Figure 13. The graph is drawn by changing the
threshold parameter δ, which controls the number of
classifiers. The accuracy improved when the number
of classifiers used for evaluation decreased observing
that the highest accuracy was obtained with the appli-
cation of twenty classifiers, and δ = 0.972. However,
the accuracy rapidly decreased when the number of
classifiers were less than twenty. Based on this ob-
servation, we can conclude that it is necessary to de-
fine the required number of classifiers corresponding
to each skeleton’s orientation to maintain high accu-
racy. Classifiers that were not used in the evaluation
mainly correspond to the orientations of the front and
the back. The reason for this is that a 2D skeleton rep-
resentation in the front or back orientations provides
less information on the depth of limbs, as described
in 4.3.3. However, if a white cane user employs a
white cane by swinging his/her arm left and right, the
skeleton representations in the front or back orienta-
tions is important to recognize such action. Therefore,
we plan to introduce a mechanism to select important
classifiers according to the action presented in the in-
put skeleton representation sequence.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
442

5 CONCLUSION
In this paper, we aimed to solve the problem of rec-
ognizing white cane users by classifying pedestrians
from the temporal transition of their skeletons. We
proposed a 2D skeleton orientation alignment method
named SOANets. Through experiments, we demon-
strated that the accuracy of analyzing pedestrian im-
age sequences improves by incorporating the skeleton
orientation alignment of an input 2D skeleton, and the
effectiveness of the proposed method was confirmed.
In the future, we plan to train SOANets with more
action patterns. We will also integrate object recogni-
tion methods that can directly detect a white cane.
ACKNOWLEDGMENTS
Parts of this research were supported by MEXT,
Grant-in-Aid for Scientific Research
REFERENCES
Baptista, R., Ghorbel, E., Papadopoulos, K., Demisse,
G. G., Aouada, D., and Ottersten, B. (2019). View-
invariant action recognition from RGB data via 3D
pose estimation. In Proceeding of the 2019 IEEE In-
ternational Conference on Acoustics, Speech and Sig-
nal Processing, pages 2542–2546.
Cai, Z. and Vasconcelos, N. (2018). Cascade R-CNN: Delv-
ing into High Quality Object Detection. In Proceeding
of the 2018 IEEE Conference on Computer Vision and
Pattern Recognition, pages 6154–6162.
Cao, Z., Simon, T., Wei, S. E., and Sheikh, Y. (2017). Real-
time multi-person 2D pose estimation using part affin-
ity field. In Proceeding of the 2017 IEEE Conference
on Computer Vision and Pattern Recognition, pages
7291–7299.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask R-CNN. In Proceeding of the 2017 IEEE In-
ternational Conference on Computer Vision, pages
2961–2969.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9(8):1735–1780.
Le, T. M., Inoue, N., and Shinoda, K. (2018). A fine-to-
coarse convolutional neural network for 3D human ac-
tion recognition. In Proceeding of the 29th British
Machine Vision Conf, pages 184–1–184–13.
Martinez, J., Hossain, R., Romero, J., and Little, J. J.
(2016). A simple yet effective baseline for 3D hu-
man pose estimation. In Proceeding of the 2017 IEEE
International Conference on Computer Vision, pages
2640–2649.
Nishida, N., Kawanishi, Y., Deguchi, D., Ide, I., Murase,
H., and Piao, J. (2019). Exemplar-based Pseudo-
Viewpoint Rotation for White-Cane User Recognition
from a 2D Human Pose Sequence. In Proceeding of
the 16th IEEE International Conference on Advanced
Video and Signal-based Surveillance, number Paper
ID 29.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement. Computing Research Reposi-
tory, (arXiv:1804.02767).
Si, C., Chen, W., Wang, W., Wang, L., and Tan, T. (2019).
An attention enhanced graph convolutional LSTM
network for skeleton-based action recognition. In Pro-
ceeding of the 2019 IEEE Conference on Computer
Vision and Pattern Recognition, pages 1227–1236.
Sun, L., Jia, K., Chen, K., Yeung, D. Y., Shi, B. E., and
Savarese, S. (2017). Lattice long short-term memory
for human action recognition. In Proceeding of the
2017 IEEE International Conference on Computer Vi-
sion, pages 2147–2156.
Tanikawa, U., Kawanishi, Y., Deguchi, D., Ide, I., Murase,
H., and Kawai, R. (2017). Wheelchair-user Detection
Combined with Parts-based Tracking. In Proceed-
ing of the 12th Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Appli-
cations, volume 5, pages 165–172.
Wang, C., Wang, Y., and Yuille, A. L. (2016). Mining 3D
key-pose-motifs for action recognition. In Proceeding
of the 2016 IEEE Conference on Computer Vision and
Pattern Recognition, pages 2639–2647.
Wei, S. E., Ramakrishna, V., Kanede, T., and Sheikh, Y.
(2016). Convolutional pose machines. In Proceeding
of the 2016 IEEE Conference on Computer Vision and
Pattern Recognition, pages 4724–4732.
SOANets: Encoder-decoder based Skeleton Orientation Alignment Network for White Cane User Recognition from 2D Human Skeleton
Sequence
443
