
Investigating Synthetic Data Sets for Crowd Counting in Cross-scene
Scenarios
Rita Delussu, Lorenzo Putzu and Giorgio Fumera
University of Cagliari, Piazza D’Armi, Cagliari, Italy
Department of Electrical and Electronic Engineering, Piazza D’armi, 09123 Cagliari, Italy
Keywords:
Cross-scene, Crowd Analysis, Crowd Density Estimation, Synthetic Data Sets, Texture Features, Regression.
Abstract:
Crowd counting and density estimation are crucial functionalities in intelligent video surveillance systems but
are also very challenging computer vision tasks in scenarios characterised by dense crowds, due to scale and
perspective variations, overlapping and occlusions. Regression-based crowd counting models are used for
dense crowd scenes, where pedestrian detection is infeasible. We focus on real-world, cross-scene application
scenarios where no manually annotated images of the target scene are available for training regression models,
but only images with different backgrounds and camera views can be used (e.g., from publicly available data
sets), which can lead to low accuracy. To overcome this issue, we propose to build the training set using
synthetic images of the target scene, which can be automatically annotated with no manual effort. This work
provides a preliminary empirical evaluation of the effectiveness of the above solution. To this aim, we carry
out experiments using real data sets as the target scenes (testing set) and using different kinds of synthetically
generated crowd images of the target scenes as training data. Our results show that synthetic training images
can be effective, provided that also their background, beside their perspective, closely reproduces the one of
the target scene.
1 INTRODUCTION
The use of computer vision tools to automatise crowd
monitoring and analysis tasks, or to support human
operators involved in such tasks, is becoming increas-
ingly relevant in many applications, such as crowd
behaviour analysis and intelligent video surveillance,
given the nowadays pervasive deployment of CCTV
systems. One prominent example is the use of CCTV
systems by Law Enforcement Agencies to monitor
and guarantee the security of mass gathering events,
which is one of the issues addressed by the EU H2020
LETSCROWD project
1
our research group is work-
ing on. In particular, crowd counting and density es-
timation are potentially very useful functionalities of
crowd monitoring systems. These are however very
challenging tasks in practical applications due to is-
sues such as illumination changes, severe occlusions
due to objects in the scene or by other people (see
Fig. 1), and distortions caused by the camera view,
which make the size and perspective of people in
the scene change considerably according to the dis-
1
https://letscrowd.eu/
Figure 1: Example of a static (left) and dynamic (right) oc-
clusion, where a person is almost totally occluded by a palm
and by another person, respectively. (Images taken from the
Mall and PETS2009 data sets – see Sect- 3.3).
tance from the camera. In this work, we focus on
the most challenging scenario of dense crowd scenes
(see Fig. 2), where crowd counting and density esti-
mation cannot rely on pedestrian detection. For dense
crowd scenes, the so-called counting by regression
approach is widely used in the literature (Loy et al.,
2013). It consists of estimating the number of people
using a regression model trained on low-level image
Delussu, R., Putzu, L. and Fumera, G.
Investigating Synthetic Data Sets for Crowd Counting in Cross-scene Scenar ios.
DOI: 10.5220/0008981803650372
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
365-372
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
365
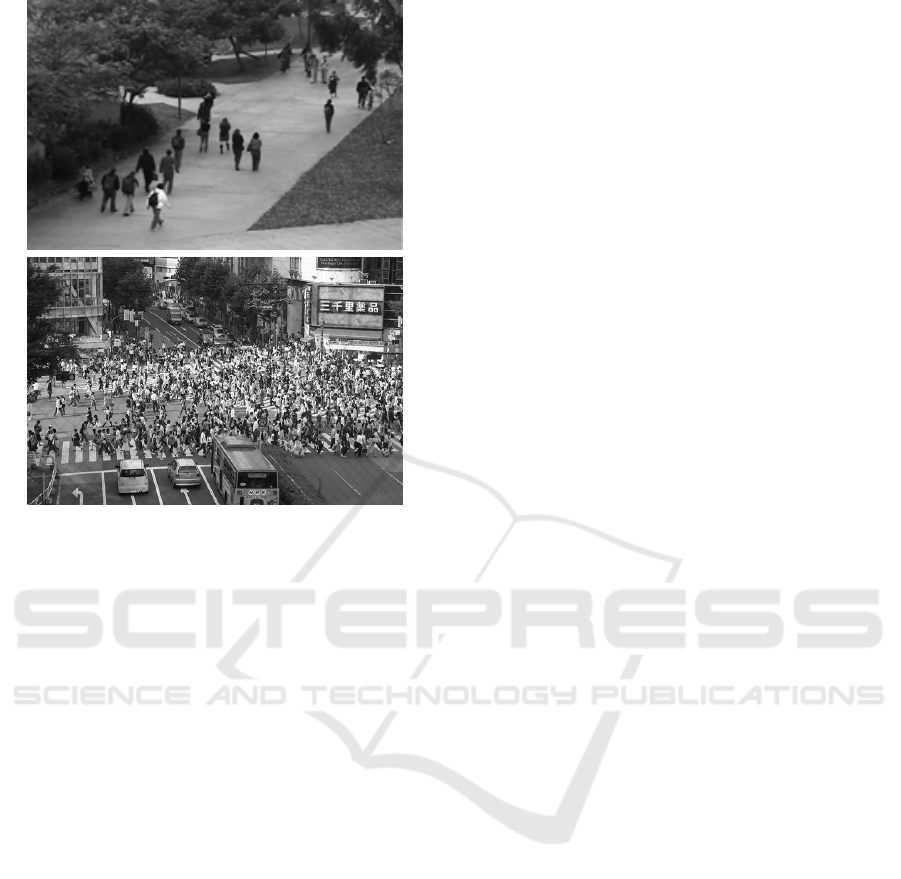
Figure 2: Examples of a non-crowded scene (top) and of
a crowded scene (bottom). (Images taken from the UCSD
and ShanghaiTech data sets – see Sect- 3.3).
features, using images of a crowd manually annotated
with the number of people in the scene. Recently,
several regression-based methods that use Convolu-
tional Neural Networks (CNNs) have been proposed
(Sindagi and Patel, 2017a); most of them directly
estimate the density map and then obtain the peo-
ple count from it. However, CNNs require massive
amounts of training data, which may not be avail-
able in real applications. Moreover, using the den-
sity map as the ground truth requires the position of
each pedestrian in the scene to be manually annotated
(Liu et al., 2019), which requires a much higher effort
than providing only the people count. Furthermore,
CNN-based approaches may require several seconds
to compute the density map for a single video frame,
which makes them not yet suitable for real-time ap-
plications. For all the reasons above in this work, we
focus on earlier regression-based approaches that do
not use CNNs.
Two issues that affect the performance of
regression-based methods are the fact that the features
typically used are significantly affected by the image
background, and that in some application scenarios it
may be unfeasible to collect and manually annotate
crowd images of the target scene to build a represen-
tative training set. In such a case one faces a chal-
lenging cross-scene scenario characterised by train-
ing images exhibiting different perspective (camera
views) and background from the target scene where
the crowd counting system has to be deployed: as a
consequence its accuracy can be very low. This is the
application scenario we focus on in this work.
Inspired by some recent works that used synthetic
training images to improve the performance of crowd
counting approaches based on pedestrian or body part
detection (Courty et al., 2014; Schr
¨
oder et al., 2018),
as well as in other computer vision tasks, in this
work we propose to address the issues of regression-
based crowd counting methods mentioned above by
building a training set of synthetic images of the tar-
get scene. This would allow, e.g., to create scene-
specific regression models on the fly for new camera
installations. This work aims to empirically investi-
gate whether and to what extent the above solution
can improve the cross-scene effectiveness of existing
regression-based crowd counting methods in dense
crowd scenes. To this aim, we carry out experiments
using three real, benchmark data sets of dense crowd
images as the target scenes (testing set) and using dif-
ferent kinds of synthetically generated crowd images
of the same target scenes as training data.
The remainder of the manuscript is structured
as follows. Related works are first summarised in
Sect. 2. Sect. 3 describes the features and the regres-
sion models considered, the real and the synthetic data
sets used in our experiments, and the accuracy mea-
sures used for performance evaluation. The experi-
mental set-up and the results are presented in Sect. 4.
Sect. 5 summarises the conclusions of this work.
2 RELATED WORK
Several crowd counting approaches have been pro-
posed so far. They can be divided into counting by
detection, counting by clustering and counting by re-
gression (Loy et al., 2013). Counting by detection is
based on pedestrian detection from still images, either
full-body (Leibe et al., 2005; Dollar et al., 2011) or
body part detection (Lin et al., 2001; Tu et al., 2008).
The latter aims at overcoming the presence of occlu-
sions and attempts to locate head and shoulders (Ge
and Collins, 2009), as these are among the most im-
portant and most visible cues for typical camera loca-
tions (Tu et al., 2008). However counting by detection
is effective only under very limited occlusion, i.e., for
non-crowded scenes (see Fig. 2, left), whereas it is
unable to deal with dense crowds (see Fig. 2, right).
Counting by clustering is based on people track-
ing, and assumes that coherent feature trajectories can
be grouped together to approximate the number of
people; this approach is ineffective as well on dense
crowd scenes (Loy et al., 2013).
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
366

The counting by regression approach, which we
focus on in this work, aims at mapping from low-
level image features to the number of people or to
the density map of a scene by supervised training of
a regression model. The earliest methods estimate
the number of people using holistic scene descriptors
such as foreground segment (Ma et al., 2004), edge
(Kong et al., 2005), texture and gradient (Wu et al.,
2006; Ojala et al., 2002), shape (Dong et al., 2007),
intensity (Lempitsky and Zisserman, 2010) and mo-
tion (Benabbas et al., 2010). The main regression
models used in such methods are Linear Regression,
Random Forests and Support Vector Regression (Loy
et al., 2013). More recently, a variety of methods
based on CNNs, mostly regression-based, have been
proposed (Sindagi and Patel, 2017a). Such methods
estimate the density map directly and obtain the peo-
ple count from it. Most of them exploit specifically-
devised CNN architectures, although they often share
several layers with generic architectures and then fine-
tune them on a specific training set (Sindagi and Patel,
2017b).
As for all supervised methods, the effectiveness
of regression-based crowd counting methods relies on
a representative training set of crowd images manu-
ally annotated with the people count (or the density
map). However, in some application scenarios, it may
be unfeasible to collect and manually annotate crowd
images to build a training set representative of the
target scene where a crowd counting system has to
be deployed. If a training set made up of images of
different scenes (e.g., taken from publicly available,
benchmark data sets), one faces a cross-scene sce-
nario where the mismatch in image background and
perspective (camera view) can severely affect the ac-
curacy of the resulting model. We shall provide clear
empirical evidence of this issue in Sect. 4. In fact, fea-
tures typically used by regression-based methods are
significantly affected by the image background. Ex-
isting background subtraction and segmentation ap-
proaches are not sufficient under frequent illumina-
tion changes or, even worse, when a background im-
age is not available. Moreover, regression models
are affected by perspective distortions (objects in the
background appear smaller than foreground ones).
Several data sets of crowd images have been col-
lected so far (see Sect. 3.3), which however exhibit
several limitations: most of them contain only non-
dense crowd scenes with limited occlusion, and are
also relatively small in size. This can further af-
fect the cross-scene performance of regression-based
models. Domain adaptation methods have been pro-
posed to mitigate the cross-scene issue (Change Loy
et al., 2013), but they nevertheless require images of
the target scene for fine-tuning, which is not feasible
in the application scenario considered in this work.
In some computer vision tasks, including crowd
counting by detection, the use of synthetic data sets
built using computer graphics tools has been proposed
to overcome the limits of data sets made up of real im-
ages. This solution can be potentially useful also for
regression-based crowd counting in the above appli-
cation scenario since it would allow to generate syn-
thetic images of the target scene, and to automatically
control every parameter of interest such as the num-
ber and location of pedestrians and the scene perspec-
tive, background and illumination. A similar solution
has already been proposed in (Wang et al., 2019), but
in the context of a domain adaptation method which
requires crowd images of the target scene for fine-
tuning, which is not feasible in the application sce-
nario considered in this work.
3 EXPERIMENTAL SETTING
In this section, we describe the methods, the data sets
and experimental setting used in this work. Since we
focus on the counting by regression approach, we first
describe the features and regression models, that are
mainly based on the ones described in the surveys of
(Loy et al., 2013; Ryan et al., 2015).
3.1 Feature Extraction
Several kinds of features have been proposed so far
for regression-based crowd counting, and often dif-
ferent complementary features are combined together.
We consider here segment and edge features, which
are among the most common foreground ones, as well
as the Grey-Level Co-occurrence Matrix (GLCM)
and Local Binary Patterns (LBP) texture features.
Foreground features can be obtained through back-
ground subtraction. Segment features (Ma et al.,
2004) aim at capturing global properties of the im-
age regions, such as area and perimeter; edge features
(Kong et al., 2005) focus on complementary informa-
tion about local image properties, such as the number
of edge pixels and edge orientation. Texture features
analyse the spatial relationships among image pixels
(Loy et al., 2013) instead. In particular, GLCM is ob-
tained in the form of a matrix by computing how often
pairs of pixels with a certain value and in a specified
spatial relationship occur. From the GLCM several
global statistical information can be extracted (Har-
alick et al., 1973). The LBP descriptor is capable to
characterise the local structure of the image, as it is
rotation invariant and robust to grey-scale changing
Investigating Synthetic Data Sets for Crowd Counting in Cross-scene Scenarios
367

(Ojala et al., 2002). All the mentioned feature sets
have been combined together, using a simple concate-
nation, to create a single and stronger feature set.
3.2 Regression Models
Regression-based methods can be divided into global
and local (Loy et al., 2013). Global methods
learn a single regression function for the whole im-
age, whereas local methods subdivide an image into
patches and estimate the total people count by per-
forming regression on each patch. Local methods can
handle efficiently different kinds of scenes in which
the density is not the same over the whole image but
can be too complex for real-world applications. For
this reason, we focus on global methods.
Several global regression models have been pro-
posed in the literature (Loy et al., 2013). The sim-
plest one is linear regression, which estimates the
people count finding a linear relationship with a D-
dimensional feature vector that describes the image.
Since the feature space size D can be very high, to
address the issue of feature collinearity partial least
squares (PLS) regression has been used (Abdi, 2010).
Non-linear models have also been proposed for crowd
counting, such as Gaussian process regression (GPR).
However, its processing cost at the prediction phase is
too high and therefore, not suitable for real-time ap-
plications. For this reason, we do not consider it in
this work, preferring others non-linear models, such
as the Random Forests (RF) (Criminisi et al., 2012),
which has the advantage of being scalable and less
sensitive to parameter selection, and the Support vec-
tor regression (SVR) (Basak et al., 2007) with a radial
basis function (RBF) kernel, which is one of the most
popular regression models.
3.3 Real Data Sets
As stated above, in this work we focus on crowd
counting systems to be deployed on a specific target
scene (i.e., camera view), with a dense crowd. To our
knowledge, only three publicly available data sets can
be considered representative of dense crowd scenarios
(Zhang et al., 2016; Zhang et al., 2019; Sindagi and
Patel, 2017a), namely ShanghaiTech, UCF-QNRF
and World Expo Shanghai 2010. However, they do
not contain images (in a significant number) from a
same scene. On the contrary, to evaluate the effec-
tiveness of a crowd counting system data sets charac-
terised by the whole videos (or at least a significant
number of frames) from a same scene with a dense
crowd are required. Unfortunately, there are very few
publicly available data sets manually annotated with
the crowd count that exhibit all the above features.
For this reason, we used only three real data sets of
non-dense crowd scenes (less than 60 persons per im-
age), that are Mall, UCSD and PETS. [Mall] has 2000
frames collected using a publicly accessible camera in
a shopping mall (Loy et al., 2013). It contains several
crowd densities from 13 to 53 people per frame (on
average 31) for a total of 62,325 pedestrians. This is a
challenging data set with severe perspective distortion
and several occlusions caused by static objects or by
other people. UCSD contains a total of 70 videos ac-
quired from a low-resolution camera (frames of size
238×158) installed in a pedestrian walkway at the
UCSD campus (Chan et al., 2008). It contains a to-
tal of 49,885 pedestrians, with an average number of
people per frame of around 25. For these data sets, we
used the same setting as in (Loy et al., 2013), where
2000 frames were extracted from the original data set.
[PETS2009] was built to test several visual surveil-
lance tasks (Ferryman and Shahrokni, 2009), includ-
ing people counting (S1 part). It is a multi-view data
set, and each sequence has been acquired with a dif-
ferent camera, but the frames belonging to the same
camera view can be used to create some single-scene
data set. To this aim, we used only the images from
the first camera as a single-scene data set, using the
ground truth provided in (Zhang and Chan, 2019).
Fig. 3 shows some examples of frames from all the
above data sets.
3.4 Synthetic Data Sets
Building and evaluating crowd counting models in
real-world application scenarios is a very complex
task, especially when no annotated images of the tar-
get scene are available to train regression models.
Synthetic images can be very useful to this aim, since
the exact number of pedestrians shown in such images
is exactly known and no manual counting is required.
Synthetic data sets are therefore a potentially useful
solution to build the training set of a regression model.
To this aim, in this work we evaluated the effective-
ness of using as a training set synthetic crowd images
which reproduce the target scene (the background, the
perspective or both) of the testing set, where the latter
is obtained from a real data set.
We collected three different data sets of syn-
thetic images. The first two data sets have been
created using a commercial crowd modelling and
simulation software developed by a member of the
LETSCROWD consortium,
2
which is based on the
computer graphic engine Unity
3
. This software al-
2
Crowd Dynamics, https://www.crowddynamics.com/
3
https://unity.com/
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
368
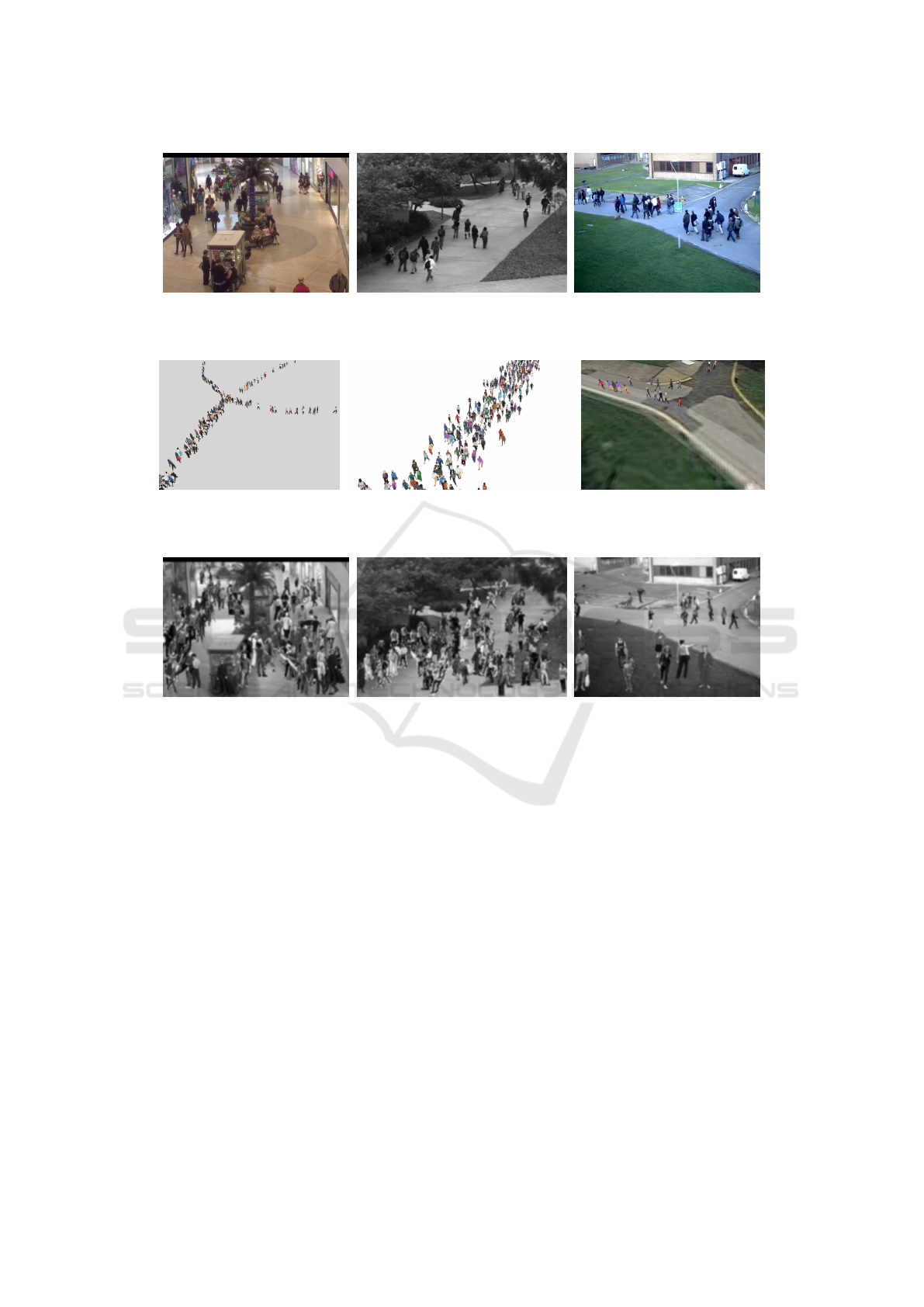
(a) (b) (c)
Figure 3: Example of frames from real data sets: (a) Mall, (b) UCSD, (c) PETS 2009.
(a) (b) (c)
Figure 4: Example of frames from our CG-sets: (a), (b) uniform background; (c) PETS2009-like background.
(a) (b) (c)
Figure 5: Examples of frames from our PNG-sets, using background from the real data sets: (a) Mall, (b) UCSD, (c) PETS
2009. (Images are slightly blurred in this figure for privacy reasons.)
lows to generate synthetic crowd scenes by choosing
a background image, the number of pedestrians and
their paths. In the first data set, we reproduced the
camera views and perspectives of the three real data
sets, but not the corresponding people flow and crowd
size, nor the background. We collected in total 15000
frames from videos of pedestrians walking in differ-
ent directions on a uniform background; the number
of pedestrians in each frame ranges from 1 to 1000.
Since the features used to train global regression
models are significantly affected by the image back-
ground, in the second set of synthetic images, we tried
to simulate also the background of the target, real test-
ing scenes. However, this turned out to be much more
complex, and therefore we only reproduced the sin-
gle view extracted from the PETS2009 real data set.
Fig. 4 shows some frames of the first two synthetic
data sets above obtained by a computer graphic tool,
which will be denoted from now on by CG-sets.
In the third data set of synthetic images, we sim-
ulated the real testing scene by superimposing pedes-
trian images to a real background image of that scene,
to increase the realism of synthetic images. First, for
each real (testing) data set we picked an image where
no pedestrians appeared (if any), or obtained a back-
ground image by background subtraction; then we de-
fined the region of interest (ROI) and the perspective
map. The perspective map is necessary to estimate
the pedestrian scales (Zhang et al., 2015), and is com-
puted by linear interpolation from the measurements
of several pedestrians randomly selected in the im-
ages, assuming that all the adult pedestrians present a
standard height. This map allows one to easily com-
pute the height in pixels of a pedestrian in each lo-
cation of the ROI. Then we collected from the web a
set of images with a transparent background (in PNG
format) showing a single person. The synthetic im-
ages were finally obtained by superimposing a given
Investigating Synthetic Data Sets for Crowd Counting in Cross-scene Scenarios
369

number of randomly selected pedestrian images over
the background image at randomly chosen locations
in the ROI, by resizing pedestrian images according
to the perspective map. Overlapping between pedes-
trians was controlled by drawing first the one farthest
from the camera. For each target (test) scene, we
built 1000 synthetic images containing a number of
pedestrians ranging from 1 to 100. Fig. 5 shows some
examples of these images, that from now on will be
denoted by PNG-sets. We point out that this latter
kind of synthetic images may not present a realistic
perspective distortion nor real human poses. Never-
theless, such images respect the scale and the camera
view, which are the most relevant features for the con-
sidered task; this is also a straightforward procedure
to create synthetic images that reproduce a given tar-
get scene. In particular, it also allows to automatically
annotate each image with the number of pedestrians
inside it.
3.5 Performance Measures
We evaluated crowd counting accuracy using two
common metrics that are defined over a single im-
age: the absolute error (AE) and the root squared er-
ror (RSE). We shall report their average values com-
puted across all testing images of a given target scene,
i.e., the mean absolute error (MAE) and the root mean
squared error (RMSE):
MAE =
1
N
N
∑
i=1
|η
i
−
ˆ
η
i
| , (1)
RMSE =
s
1
N
N
∑
i=1
(η
i
−
ˆ
η
i
)
2
, (2)
where N is the total number of testing images, η
i
is
the ground truth (pedestrian number) and
ˆ
η
i
is the es-
timated pedestrian number for the i-th frame. The
MAE computes the average absolute difference be-
tween the actual and the estimated count. The second
RMSE, as a result of the squaring of each difference,
penalises large errors more heavily than small ones,
instead. We point out that in many recent works (Liu
et al., 2019; Wang et al., 2019; Ryan et al., 2015) the
metric RMSE was used, but it was called MSE; how-
ever, the MSE metric does not include the square root
(Loy et al., 2013). We prefer to use the RMSE metric
to be aligned with the most recent works in this area,
and also because it is expressed in the same unit of
measurement as MAE.
Table 1: Crowd counting accuracy (MAE and RMSE) in
a same-scene scenario (training and testing images come
from the same scene) using different regression models (RF,
SVR and PLS), on each real data set (Mall, UCSD and
PETS).
Data set
RF SVR PLS
MAE RMSE MAE RMSE MAE RMSE
Mall 3.66 4.53 5.53 6.98 3.03 3.83
UCSD 2.85 3.45 6.79 8.35 2.32 2.82
PETS 7.51 9.49 8.66 10.34 5.46 7.1
4 EXPERIMENTS
We performed three different experiments whose goal
is to verify if and to what extent using synthetic im-
ages of the target scene in the training set can pro-
vide an effective, scene-specific regression model for
people counting tasks in dense crowd scenes. To
create a baseline for comparison, in the first exper-
iment we evaluated the performance on each of the
three real data sets of Sect. 3.3 by using in the train-
ing and test set only real images from the same data
set. To average the influence of training/testing data
splits we performed a 10-fold cross-validation, where
the training and test sets are made up respectively of
80% and 20% disjoint subset of images. The results
are reported in Table 1. The second experiment sim-
ulates a real-world cross-scene application scenario,
e.g., when a camera is installed in a new place and
no annotated crowd images of the same target scene
are available for training a scene-specific regression
model; in this case the regression model has to be
trained using a previously available data set which
may be not representative of the target scene. To this
aim we trained a regression model on training data
belonging to one or two of the three real data sets,
and tested it on the other data set, which is consid-
ered as the target scene. Our aim is to evaluate the
amount of performance decrease with respect to the
use of training data from the same target scene, as in
the first experiment above. The results are reported
in Table 2. As it can be expected, a comparison be-
tween tables 1 and 2 shows that the performance on
the target scene always decrease when training data
come from different scenes, which can be due to the
difference in the background and in the perspective.
We also point out that using the perspective correc-
tion described in (Loy et al., 2013) we observed a fur-
ther performance decrease: this may be because the
perspective maps used are not invariant to scale.
The third experiment aims at evaluating whether
using synthetic training images of the target scene im-
proves the crowd counting accuracy with respect to
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
370

Table 2: Crowd counting accuracy (MAE and RMSE) in
a cross-scene scenario (training and testing images come
from different scenes) using different regression models
(RF, SVR and PLS). Each group of three rows corresponds
to a single real data set used as the target scene (Mall, UCSD
and PETS); the rows in each group correspond to the other
two data sets used for training, either alone or together.
Train Set
RF SVR PLS
MAE RMSE MAE RMSE MAE RMSE
Mall
UCSD 17.16 18.51 6.39 8.09 15.57 16.75
PETS 16.26 17.21 8.87 10.71 19.38 20.08
UCSD-PETS 18.32 19.47 6.89 8.65 14.49 15.83
UCSD
Mall 10.92 12.49 9.44 10.62 10.53 13.05
PETS 12.39 14.02 20.97 21.42 50.76 51.37
Mall-PETS 13.08 14.86 19.97 20.23 19.78 19.99
PETS
Mall 18.26 20.97 13.27 15.51 23.84 26.29
UCSD 10.11 12.79 10.75 12.46 10.36 13.11
Mall-UCSD 13.77 15.82 12.18 15.08 16.51 18.52
Table 3: Crowd counting accuracy attained by training the
regression models RF, SVR and PLS on synthetic images
reproducing the target (testing) scene. Synthetic images
come from the CG-set: ‘Blank-CG’ and ‘PETS-CG’ denote
respectively images with no background, and images which
reproduce the PETS data set background.
Test Train
RF SVR PLS
MAE RMSE MAE RMSE MAE RMSE
Mall Blank-CG 5.74 7.16 5.52 6.97 5.62 7.0
UCSD Blank-CG 5.9 7.47 6.99 8.37 7.24 12.17
PETS Blank-CG 9.25 11.66 9.31 10.9 7.56 9.39
PETS PETS-CG 7.39 9.28 8.55 10.31 7.62 9.24
the ones attained by using real training images from
different scenes. The set-up is similar to the second
experiment, with the only difference that, for each real
data set used as the target scene (testing set) each re-
gression model is now trained using one of the data
sets of synthetic images (see Sect. 3.4) that reproduce
the same target scene. The results are reported in
Table 3 for CG-set images and in Table 4 for PNG-
set images. As expected, the crowd counting perfor-
mances on the target scene are better when training
data come from synthetic images, instead of from real
images of a different scene, as in Table 2. This mainly
depends on the background and perspective that could
differ a lot between two real scenes, while using the
synthetic images we can reproduce, with a certain ac-
Table 4: Crowd counting accuracy attained by training the
regression models RF, SVR and PLS on synthetic (PNG-
set) images reproducing the target (testing) scene.
Test Train
RF SVR PLS
MAE RMSE MAE RMSE MAE RMSE
Mall Mall-PNG 4.73 5.84 5.99 7.63 5.65 7.14
UCSD UCSD-PNG 4.08 4.95 11.04 13.35 2.76 3.5
PETS PETS-PNG 7.42 9.07 14.77 17.94 8.11 10.31
curacy, both features. Nevertheless, the performances
of the regression models exploiting synthetic images
are still lower than the ones obtained from models
exploiting real images of the same scene (reported
in Table 1), even if the gap in performances become
smaller with the presence of more realistic (accurate)
images. This is also confirmed by comparing the re-
sults in Table 3 and in Table 4, where the regres-
sion models trained with the PNG-set images demon-
strated better performances than the ones obtained
with the CG-set images. In general, the presence of
the real scene background in the synthetic images is
crucial to create strong regression models. Indeed,
even using the CG-set which reproduce the PETS data
set background, the performances increase compared
to the images presenting a blank background. This
shows that also fully synthetic images could be effec-
tive to some extent, but they would require a back-
ground and a perspective view closer to the images of
the target scene.
5 CONCLUSIONS
In this work, we considered a challenging, cross-
scene application scenario for crowd counting in
dense crowd scenes, where no manually annotated
images of the target scene are available for training a
regression-based model. To improve the accuracy of
regression models under this scenario, we proposed to
build the training set using synthetic images of the tar-
get crowd scene, characterised by the same perspec-
tive (view) and possibly by the same background. We
empirically evaluated the effectiveness of this solu-
tion using several real data sets of crowd images as the
target scenes (testing set) and different kinds of syn-
thetically generated images of the target scene as the
training set. Preliminary results provide evidence that
using synthetic images can be an effective solution,
provided that they closely reproduce the background
and the camera perspective of the target scene.
The use of synthetic images may also be useful
in the same application scenario considered here for
regression-based methods that use CNNs, which have
not been considered in this work due to their still too
high processing time during inference. Accordingly,
our ongoing efforts are devoted to investigating the
performance of CNN-based crowd counting methods
using synthetic images for training or fine-tuning.
Investigating Synthetic Data Sets for Crowd Counting in Cross-scene Scenarios
371

ACKNOWLEDGEMENTS
This work has been partially supported by the
LETSCROWD project, funded by the European
Union Horizon 2020 research and innovation pro-
gramme under grant agreement No 740466, and
by the project ODIS - Optimisation of DIstributed
systems in the Smart-city and smart-grid settings,
CUP:F72F16003170002, funded by Fondazione di
Sardegna. The authors also thank the LETSCROWD
partner Crowd Dynamics for providing some of the
synthetic data sets.
REFERENCES
Abdi, H. (2010). Partial least squares regression and pro-
jection on latent structure regression (pls regression).
Wiley interdisciplinary reviews: computational statis-
tics, 2(1):97–106.
Basak, D., Pal, S., and Patranabis, D. C. (2007). Support
vector regression. Neural Information Processing-
Letters and Reviews, 11(10):203–224.
Benabbas, Y., Ihaddadene, N., Yahiaoui, T., Urruty, T., and
Djeraba, C. (2010). Spatio-temporal optical flow anal-
ysis for people counting. In AVSS, pages 212–217.
Chan, A. B., Liang, Z.-S. J., and Vasconcelos, N. (2008).
Privacy preserving crowd monitoring: Counting peo-
ple without people models or tracking. In CVPR,
pages 1–7.
Change Loy, C., Gong, S., and Xiang, T. (2013). From
semi-supervised to transfer counting of crowds. In
ICCV, pages 2256–2263.
Courty, N., Allain, P., Creusot, C., and Corpetti, T. (2014).
Using the agoraset dataset: Assessing for the quality
of crowd video analysis methods. Pattern Recognition
Letters, 44:161–170.
Criminisi, A., Shotton, J., Konukoglu, E., et al. (2012). De-
cision forests: A unified framework for classification,
regression, density estimation, manifold learning and
semi-supervised learning. Foundations and Trends
R
in Computer Graphics and Vision, 7(2–3):81–227.
Dollar, P., Wojek, C., Schiele, B., and Perona, P. (2011).
Pedestrian detection: An evaluation of the state of the
art. IEEE Trans. on PAMI, 34(4):743–761.
Dong, L., Parameswaran, V., Ramesh, V., and Zoghlami, I.
(2007). Fast crowd segmentation using shape index-
ing. In ICCV, pages 1–8.
Ferryman, J. and Shahrokni, A. (2009). Pets2009: Dataset
and challenge. In PETS, pages 1–6.
Ge, W. and Collins, R. T. (2009). Marked point processes
for crowd counting. In CVPR, pages 2913–2920.
Haralick, R. M., Shanmugam, K., et al. (1973). Textural
features for image classification. IEEE Trans. on sys-
tems, man, and cybernetics, SMC-3(6):610–621.
Kong, D., Gray, D., and Tao, H. (2005). Counting pedes-
trians in crowds using viewpoint invariant training. In
BMVC, pages 1–10.
Leibe, B., Seemann, E., and Schiele, B. (2005). Pedestrian
detection in crowded scenes. In CVPR, pages 878–
885.
Lempitsky, V. and Zisserman, A. (2010). Learning to count
objects in images. In Advances in neural information
processing systems, pages 1324–1332.
Lin, S.-F., Chen, J.-Y., and Chao, H.-X. (2001). Estimation
of number of people in crowded scenes using perspec-
tive transformation. IEEE Trans. on Systems, Man,
and Cybernetics, 31(6):645–654.
Liu, X., Van De Weijer, J., and Bagdanov, A. D. (2019).
Exploiting unlabeled data in cnns by self-supervised
learning to rank. Trans. on PAMI, 41(8):1862–1878.
Loy, C. C., Chen, K., Gong, S., and Xiang, T. (2013).
Crowd counting and profiling: Methodology and eval-
uation. In Modeling, simulation and visual analysis of
crowds, pages 347–382. Springer.
Ma, R., Li, L., Huang, W., and Tian, Q. (2004). On
pixel count based crowd density estimation for visual
surveillance. In CIS, pages 170–173.
Ojala, T., Pietik
¨
ainen, M., and M
¨
aenp
¨
a
¨
a, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans.
on PAMI, 24(7):971–987.
Ryan, D., Denman, S., Sridharan, S., and Fookes, C. (2015).
An evaluation of crowd counting methods, features
and regression models. Computer Vision and Image
Understanding, 130:1–17.
Schr
¨
oder, G., Senst, T., Bochinski, E., and Sikora, T. (2018).
Optical flow dataset and benchmark for visual crowd
analysis. In AVSS, pages 1–6.
Sindagi, V. and Patel, V. M. (2017a). A survey of recent
advances in cnn-based single image crowd counting
and density estimation. Pattern Recognition Letters,
107:3–16.
Sindagi, V. A. and Patel, V. M. (2017b). Cnn-based cas-
caded multi-task learning of high-level prior and den-
sity estimation for crowd counting. In AVSS, pages
1–6.
Tu, P., Sebastian, T., Doretto, G., Krahnstoever, N.,
Rittscher, J., and Yu, T. (2008). Unified crowd seg-
mentation. In ECCV, pages 691–704. Springer.
Wang, Q., Gao, J., Lin, W., and Yuan, Y. (2019). Learning
from synthetic data for crowd counting in the wild. In
CVPR, pages 8198–8207.
Wu, X., Liang, G., Lee, K. K., and Xu, Y. (2006). Crowd
density estimation using texture analysis and learning.
In ROBIO, pages 214–219.
Zhang, C., Li, H., Wang, X., and Yang, X. (2015). Cross-
scene crowd counting via deep convolutional neural
networks. In CVPR, pages 833–841.
Zhang, Q. and Chan, A. B. (2019). Wide-area crowd count-
ing via ground-plane density maps and multi-view fu-
sion cnns. In CVPR, page 8297–8306.
Zhang, Y., Zhou, C., Chang, F., and Kot, A. C. (2019). A
scale adaptive network for crowd counting. Neuro-
computing, 362:139–146.
Zhang, Y., Zhou, D., Chen, S., Gao, S., and Ma, Y. (2016).
Single-image crowd counting via multi-column con-
volutional neural network. In CVPR, pages 589–597.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
372
