
Revisiting End-to-end Deep Learning for Obstacle Avoidance:
Replication and Open Issues
Alexander K. Seewald
Seewald Solutions, L
¨
archenstraße 1, A-4616 Weißkirchen a.d. Traun, Austria
Keywords:
Deep Learning, Obstacle Avoidance, Autonomous Robotics.
Abstract:
Obstacle avoidance is an essential feature for autonomous robots. It is usually addressed with specialized
sensors and Simultaneous Localization and Mapping algorithms (SLAM, Cadena et al. (2016)). Muller et al.
(2006) have demonstrated that it can also be addressed using end-to-end deep learning. They proposed a
convolutional neural network that maps raw stereo pair input images to steering outputs and is trained by a
human driver in an outdoor setting. Using the ToyCollect open source hardware and software platform, we
replicate their main findings, compare several variants of their network that differ in the way steering angles
are represented, and extend their system to indoor obstacle avoidance. We discuss several issues for further
work concerning the automated generation of training data and the quantitative evaluation of such systems.
1 INTRODUCTION
Obstacle avoidance is an essential feature for au-
tonomous robots, the lack of which can make the es-
timation of the robot’s intelligence drop dramatically.
As benchmark task it has been known from the be-
ginning of autonomous robotics and is usually solved
with specialized sensors and Simultaneous Localiza-
tion and Mapping algorithms (SLAM, Cadena et al.
(2016)).
An intriguing but less well researched way to im-
plement obstacle avoidance is using end-to-end deep
learning to capture the obstacle avoidance skill of a
human operator. One advantage here is the ability fo
use cheap and power-efficient cameras – or in fact ar-
bitrary sensors – for obstacle avoidance rather than
more commonly used laser-range sensors. This is the
approach by Muller et al. (2006) and Muller et al.
(2004) almost fifteen years ago. They used a convolu-
tional neural network with six layers that directly pro-
cesses YUV input frames from a stereo camera pair
and outputs a steering angle to control the robot. Their
network has around 72,000 tunable parameters and
about 3.15 million multiply-add operations (MAC).
Here, we revisit deep learning for obstacle avoid-
ance to determine whether it is possible to replicate
their main findings. Contrary to other fields such
as biological, medical or psychological research, the
need for replication studies as a tool for validating
existing research approaches has not yet been ade-
quately understood for Deep Learning.
1
However, the
complexity of Deep Learning systems are such that to
determine more exactly what makes a certain com-
bination of data, network structure and training/test-
ing methodology reliably work for a certain well-
defined task is of utmost importance to better under-
stand these systems and their limitations. In fact we
found that although the original paper is quite opti-
mistic and states “Very few obstacles would not have
been avoided by the system” (Muller et al. (2006):
caption of Fig. 3), much later one of the original
authors states that “DAVE’s mean distance between
crashes was about 20 meters in complex environ-
ments” (Bojarski et al. (2016): Introduction, last sen-
tence of paragraph 5) both of which cannot be easily
true. Our results strongly support the latter.
Improvements in hardware and software have
made several optimizations feasible. Firstly, it is no
longer necessary to send the stereo camera images to
another machine for processing. Even small embed-
ded platforms such as Raspberry Pi (RPi) 4 can now
run such small deep-learning networks in real-time.
Secondly, due to miniaturization it is now feasible
to build small robots (< 10x10x10cm) with similar
capabilities and test the same approach on indoor ob-
stacle avoidance, which has specific challenges and
issues that differ from outdoor obstacle avoidance.
Thirdly, the general availability of stable and fast
deep-learning frameworks such as Torch, Tensorflow
1
This can be inferred from some reviewers’ comments.
652
Seewald, A.
Revisiting End-to-end Deep Learning for Obstacle Avoidance: Replication and Open Issues.
DOI: 10.5220/0008979706520659
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 652-659
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Robot Hardware Overview.
Type Robot Base Motors
Motor
controller
Camera Controller Chassis Power LocalDL
v1.3
(K3D)
Pololu Zumo
(#1418)
2x Pololu 100:1
brushed motors
(#1101)
Pololu Qik
2s9v1 Dual
Serial (#1110)
1x RPi Camera Rv1.3
w/ K
´
ula3D Bebe
Smartphone 3D lens
2
1x RPi 3B+
Modified
transparent
chassis
3
4x 3.7V 14500 LiIon
Yes
8fps
v1.21
(R2X)
Pololu Zumo
(#1418)
2x Pololu 100:1
brushed motors
(#1101)
Pololu Qik
2s9v1 Dual
Serial (#1110)
2x RPi Camera Rv2.1 2x RPi ZeroW
Three-part
3D-printed
chassis
4
4x 3.7V 14500 LiIon or
4x 1.5V AA Alkaline or
4x 1.2V AA NiMH
No
<1fps
v2.2
(OUT)
Dagu Robotics
Wild Thumper
4WD (#RS010)
4x 75:1 brushed
motors (included)
5
Pololu Qik
2s12v10 Dual
Serial (#1112)
2x RPi Camera Rv2.1
1x RPi CM3
on official
eval board
None
(open
case)
1x 7.2V 2S 5000mAh LiPo
Yes
8fps
and TensorflowLite (for RPi platforms) has made it
much easier to train such networks now. In 2012 it
was far more difficult to train convolutional neural
networks such as LeNet for handwritten digit recogni-
tion (see Seewald (2012)). Now, a simplified version
of LeNet is part of the sample code for Tensorflow.
We have built compatible robots within our Toy-
Collect open-source hardware and software plattform,
and used them to collect training data for this task
and deploy the trained models in the field. We ported
the original deep learning network from Muller et al.
(2006) to Tensorflow as precisely as possible
6
and ran
several learning experiments to determine how to best
represent steering angles. Lastly, we deployed the
trained models on two different robots and analyzed
their obstacle avoidance behaviour qualitatively in a
variety of settings.
Finally we compared our results and experiences
with those mentioned in the original paper and techni-
cal report, and discuss relevant issues for future work,
then conclude the paper.
2 RELATED RESEARCH
Muller et al. (2006) describe a purely vision-based
obstacle avoidance system for off-road mobile robots
that is trained via end-to-end deep learning. It uses
a six-layer convolutional neural network that directly
processes raw YUV images from a stereo camera pair.
For simplicity’s sake we will henceforth refer to this
network (resp. our as-precise-as-possible approxima-
tion) as DAVE
7
-like. They claim their system shows
the applicability of end-to-end learning methods to
off-road obstacle avoidance as it reliably predicts the
bearing of traversible areas in the visual field and is
2
A double periscope that divides the camera optical path
into two halves and moves them apart using mirrors, effec-
tively creating a stereo camera pair from one camera.
3
Sadly, no longer available
4
Can be plotted as one part for perfect alignment.
5
Left two and right two are connected.
6
Some ambiguity remains, see Section 5.
7
Named after the DARPA Autonomous VEhicle project.
robust to the extreme diversity of situations in off-
road environments. Their system does not need any
manual calibration, adjustments or parameter tuning,
nor selection of feature detectors, nor designing ro-
bust and fast stereo algorithms. They note some im-
portant points w.r.t. training data collection which we
have also noted for our data collection.
Muller et al. (2004) extend the previously men-
tioned paper with additional experiments, a much
more detailed description of the hardware setup, and
a slightly more detailed description of the deep learn-
ing network. A training and test environment is de-
scribed. An even more detailed description of how
training data was collected is given. They found that
using just information from one camera performs al-
most as good as using information from both cameras,
which is surprising. Modified deep learning networks
which try to control throttle as well as steering angle
and also utilize additional sensors performed disap-
pointingly.
Bojarski et al. (2016) describe a system similar to
Muller et al. (2006) that is trained to drive a real car
using 72h of training data from human drivers. They
note that the distance between crashes of the original
DAVE system was about 20m which is roughly com-
parable to what we observed in our tests. They add ar-
tificial shifts and rotations to the training data – some-
thing we also could have done. They report an au-
tonomy values of 98%, corresponding to one human
intervention every 5 minutes. However, their focus
is on lane following and not on obstacle avoidance.
They used three cameras – left, center, right – and a
more complex ten layer convolutional neural network.
It could still be interesting to test their network on our
task of obstacle avoidance, however their network is
about ten times bigger, precluding real-time perfor-
mance on the smaller RPi platforms.
8
Pfeiffer et al. (2016) describe an end-to-end mo-
tion planning system for autonomous indoor robots.
It goes beyond our approach in also requiring a target
position to move to, but uses only local information
(similar to our approach). However, their approach
uses a 270
◦
laser range finder and cannot be directly
8
Except possibly RPi4 pending further testing.
Revisiting End-to-end Deep Learning for Obstacle Avoidance: Replication and Open Issues
653

Figure 1: Robots K3D, R2X, OUT (left to right, ruler units: cm).
Figure 2: FOV comparison between robot R2X and K3D.
applied to stereo cameras. Their model is trained
using simulated training data and as such has some
problems navigating realistic office environments.
Hartbauer (2017) describes a system for colli-
sion detection inspired by the known function of the
collision-detecting neuron (DCMD) of locusts. No
machine learning takes place. The necessary com-
putational power for applying this algorithm is very
low compared to our trained network and of course no
training data must be collected. His approach can be
used with a single camera and even computes avoid-
ance vectors. One disadvantage of this approach is
that it can only be applied once the robot is moving.
Wang et al. (2019) describe a convolutional neu-
ral network that learns to predict steering output from
raw pixel values. Contrary to our approach, they use
a car driving simulator instead of real camera record-
ings, and they use three simulated cameras instead of
our two real cameras. They propose a slightly larger
network than the one we are using and explicitly ad-
dress overfitting and vanishing gradient which may
reduce the achievable performance also in our case.
9
They note several papers on end-to-end-learning for
autonomous driving including Muller et al. (2006) –
however it should be noted that most of the mentioned
9
Especially for the smaller outdoor dataset.
papers are concerned with car driving and lane fol-
lowing, and not with obstacle avoidance, which are
overlapping but different problems.
Khan and Parker (2019) describe a deep learn-
ing neural network that learns obstacle avoidance in
a class room setting from human drivers, somewhat
similar to our system. As starting point they use a
deep learning network that has been trained on an im-
age classification task and reuse some of the hidden
layers for incremental training. However, their ap-
proach used only one camera and cannot be directly
applied to stereo cameras. Still, their results seem
promising and will be considered for future experi-
ments.
3 ToyCollect PLATFORM
All experiments were conducted with our ToyCol-
lect robotics open source hardware/software platform
(https://tc.seewald.at). A hardware overview of the
three utilized robots can be found in Table 1 while
Fig.1 shows robot images.
While OUT and K3D need only a single main con-
troller and have sufficient computational power to run
a DAVE-like model at interactive frame rates (around
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
654
TCserver
TCcontrol
Camera(s)
Motors
Software
Hardware
Bluetooth
Controller
Robot
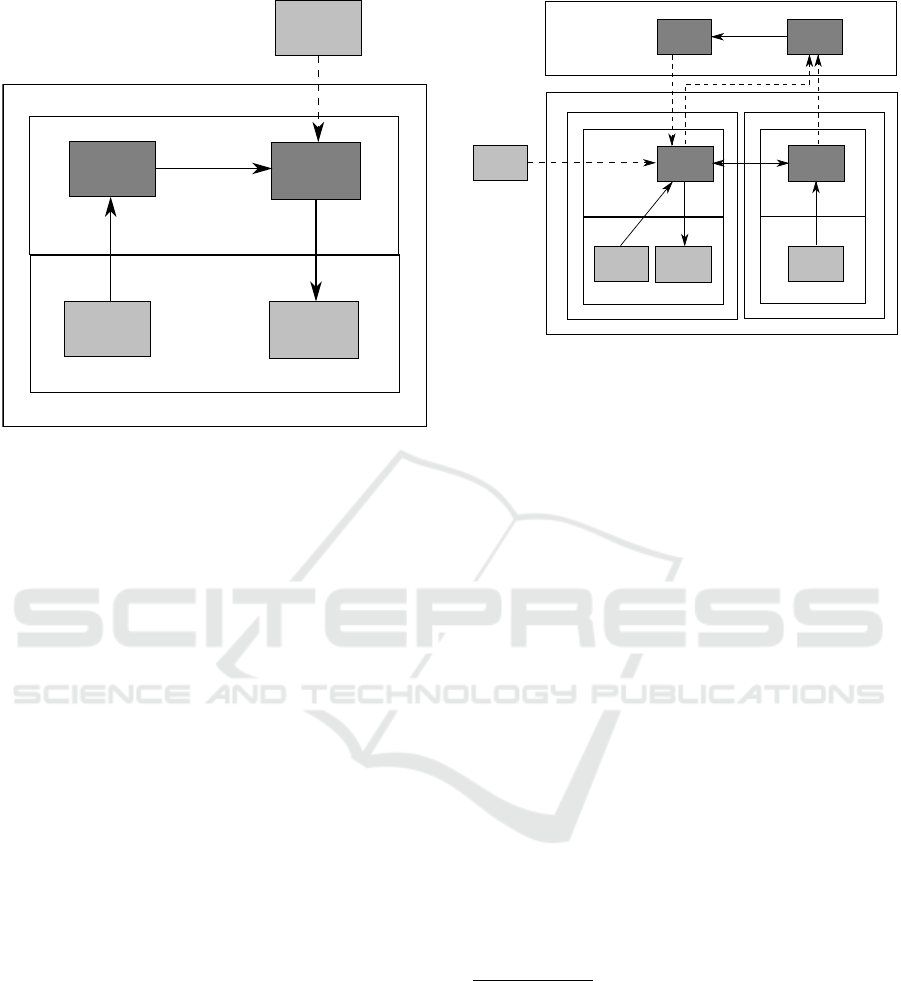
Figure 3: Local Deep Model processing (robots K3D,
OUT).
8 frames-per-second) thus enabling onboard process-
ing, the need for two cameras on R2X necessitates the
usage of two controllers, each connected to one cam-
era, and each streaming the frames independently to a
processing server.
OUT and R2X each use two cameras with a field-
of-view of 62.2
◦
horizontal and 48.8
◦
vertical, how-
ever for K3D we used the older camera which has
only 54
◦
horizontal and 41
◦
vertical field-of-view and
the horizontal viewing angle is approximately halved
again by the 3D smartphone lens. Fig.2 shows the dif-
ference in field-of-view between K3D and R2X. Be-
cause of the high spatial distortion of K3D when scal-
ing to 149x58 we only ran preliminary experiments
but excluded this robot from the final evaluation. In
Muller et al. (2006), cameras with FOV of 110
◦
were
used. However the nearest equivalent would have
been 160
◦
cameras which we could only have used on
OUT as their flat ribboncable connectors are rotated
by 180
◦
which would have necessitated a complete
redesign of R2X.
OUT also includes a depth camera, GPS module,
a 10-DOF inertial measurement unit including an ac-
celerometer, gyroscope, magnetometer and a barome-
ter for attitude measurement as well as a thermometer,
and four ultrasound sensors. However these were not
used for our experiments.
R2X includes two high-power white LEDs to al-
low operation in total darkness and whose brightness
can be controlled in 127 steps. However these also
were not used for our experiments.
Fig.3 shows the overall architecture for local pro-
cessing. TCserver denotes the robot control program
TCserver
TCcontrol
Camera
Motors
Software
Hardware
Bluetooth
Controller
Master
TCserver
Camera
Software
Hardware
Slave
Robot
TCmerge
Deep Learning Processing Server (RPi 4)
Figure 4: Remote Deep Model processing (robot R2X).
which is responsible for driving the motors, accepting
commands
10
and optionally streaming uncompressed
video to the respective controller. It also allows to
collect uncompressed video and steering direction
for deep learning training data. TCcontrol starts the
camera(s) (configured to output uncompressed YUV
video), processes camera input via TensorflowLite
and a locally stored model, and sends appropriate
commands to TCserver using a simple socket-based
3-byte command interface.
11
The Bluetooth Con-
troller implements an override that allows to control
the robot manually, overriding TCcontrol commands,
in order to move the robot to an uniform starting po-
sition or stop it before it crashes into an undetected
obstacle.
12
Unfortunately it is not possible to connect two
cameras to a RPi controller since the necessary con-
nections are only available on the chip and not on
the PCB. Only the ComputeModule allows to directly
connect two cameras; however the official evaluation
boards for the RPi compute module are too large to
fit on the small robot. So for robot R2X we integrated
two RPi Zero Ws into a single robot chassis and con-
nected each to a separate camera.
13
However since
the RPi Zero W is based on the original RPi 1, it is
10
We have implemented touch-based controls on Android
mobile phones (using one or two fingers); using foot gas
pedal, brake and steering wheel; using head-movements
from Google Cardboard; and using Bluetooth gaming con-
trollers. Here we used only the last option.
11
Basically, speed, direction and a sychronization byte.
12
Bluetooth was already available on K3D and R2X and
has lower latency than Wi-fi. Also this way the control
would not interfere with video streaming where necessary.
We paired each robot to a specific Bluetooth controller for
easy testing.
13
In the meantime other options have become available,
e.g. StereoPi, which we are currently evaluating.
Revisiting End-to-end Deep Learning for Obstacle Avoidance: Replication and Open Issues
655

much too slow for online deep learning model pro-
cessing and achieves less than 1 frames per second.
So for this robot we must stream the video frames to
a second more powerful plattform.
14
Fig.4 shows the overall architecture for remote
processing. On each of the two RPi Zeros runs TC-
server. One of them, Master, is connected to the mo-
tors and controls them as well as to one camera. The
other, Slave, is just connected to the camera and via
two logic-level GPIO lines to the Master. Master TC-
server detects the motor controller
15
and is the only
one receiving commands via Bluetooth or Wi-fi from
external sources. When receiving the start command
from TCcontrol, both TCserver processes start their
cameras and send the uncompressed YUV frames via
Wi-fi to TCmerge on the processing server. TCmerge
is responsible for combining the frames and analyz-
ing timestamps to ensure synchronization, throwing
away combinations of frames that are temporally too
far apart. The combined frames are then sent locally
via Linux pipe to TCcontrol, where they are processed
exactly in the same way as in the local processing sce-
nario and the computed commands are sent back via
Wi-fi. A slightly higher latency is observed, however
as long as both robot and deep learning processing
server are in the same Wi-fi network, frame rates of
up to 8 fps at 416x240 resolution
16
can be achieved
using this approach. The main limitation is the Wi-fi
transfer rate for uncompressed YUV frames. Accord-
ing to our measurements, the RPi4 can achieve up to
30 fps on DAVE-like deep learning models and up to
8 fps on MobileNet v2.
17
4 DATA COLLECTION
The original datasets used to train DAVE are – as
far as we know – not available. We also attempted
14
It would however be feasible to add a Raspberry Pi 4
on top of the robot by adapting the chassis. However, using
StereoPi and a CM3+ would give almost the same perfor-
mance at more managable thermal load. The RPi 4 is quite
hard to keep cooler than 60
◦
C – the temperature at which
the PLA chasiss would melt.
15
I.e. the same progam runs on both Master and Slave
and either role is dynamically detected during startup.
16
This resolution gives the most similar aspect ratio to
the originally collected 640x368.
17
NVidia’s Jetson Nano is far more powerful and could
be switched for the RPi 4 in this setting quite easily. It can
however not easily be used on most of our robots because
1) It only has one camera connector, 2) Even with active
cooling it easily reaches temperatures that melt PLA, so an
ABS or metal chassis would have to be built. However, we
could still put it on robot OUT.
to find other datasets compatible with our robot plat-
forms and focussed on obstacle avoidance – however
because of the non-mainstream task and a focus in
the research community on autonomous car driving
which is concerned mainly with lane following, we
were unable to find any other suitable datasets. So
we finally collected two different types of data (con-
sisting of frames and speed/direction control input
18
)
ourselves for indoor and outdoor obstacle avoidance.
In each case we aimed for a consistent avoidance be-
haviour roughly at the same distance from each ob-
stacle similar to that described in Muller et al. (2006).
However, instead of collecting many short sequences,
we collected large continuous sequences and after-
wards filtered the frames with a semi-automated ap-
proach. All data was collected by students during
summer internships in 2017, 2018 and 2019. The stu-
dents were made aware of the conditions for data col-
lection
19
, and were supervised for about one fifth of
recording time.
For indoor obstacle avoidance (robots R2X, K3D)
we collected 267,617 frames in a variety of indoor
settings. These were collected directly onboard R2X
robots in uncompressed YUV 4:2:2 format on SD
cards in 640x368 resolution at 10fps. Control of the
robot was via paired Bluetooth controller. We first
inspected the recorded sequences manually and re-
moved those with technical issues (e.g. no move-
ment, cameras not synchronized, test runs). Be-
cause of synchronization issues the first minute of
each sequence (up to the point when each MAS-
TER and SLAVE synchronize with an external time
server
20
) had to be removed. Additionally, sequences
with very slow speed and with backward movement
(negative speed) were removed along with 50ms of
context. Since both cameras were independently
recorded, we also removed all frames without a part-
ner frame that is at most 50ms
21
apart. We also re-
moved frames where movement information is not
available within ±25ms of the average timestamp for
the image frames. Lastly, we had to remove 80% of
the frames with straight forward movement as other-
wise these would have dominated the training set. Af-
ter all these filters, 70,745 frames remained which we
distributed into 13,791 (20%) frames for testing and
56,954 (80%) for training.
18
Only direction (steering) is used for training.
19
See Section 2
20
The RPi platform does not offer a realtime clock and
thus suffers from quite significant clock drift. It would how-
ever have been quite simple to synchronize local clock when
MASTER and SLAVE synchronize during startup but we
forgot.
21
I.e. half of 100ms which corresponds to the 10fps
recording frequency.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
656

For outdoor obstacle avoidance (robots OUT) we
collected 66,057 frames in a variety of outdoor set-
tings. These were collected on a mobile phone con-
nected via Wi-fi to an OUT robot. The phone also
translated the phone-paired Bluetooth controller com-
mands to Wi-fi and sent them to the robot. These steps
were necessary since at that time no Compute Mod-
ule with significant onboard memory was available.
22
The frames were collected in 1280x720 resolution in
raw H264 format at 15fps. We used the same filter-
ing as above and obtained 27,368 frames which we
distributed into 5,351 (20%) for testing and 22,017
(80%) for training.
In both cases the frames were downscaled to
149x58 resolution via linear interpolation (ignoring
aspect ratio) and split into equal-sized Y, U, and V
components for left and right camera.
5 RESULTS
For training, we used TensorFlow with AdamOpti-
mizer and a learning rate of 10
−4
. We aimed to re-
produce the original model described in Muller et al.
(2006) and Muller et al. (2004) (p.28, Fig. 34) as pre-
cisely as possible. However there were two points
which we could not find out by reference to the orig-
inal papers.
23
We did not manage to get the number
of trainable parameters exactly right, however these
differ even between Muller et al. (2006) and Muller
et al. (2004).
Firstly, according to Muller et al. (2006) the third
layer is connected to various subsets of maps in the
previous layer. The paper does not state which sub-
sets, only that there are 24 maps and 96 kernels. Since
the previous layer contains one map depending only
on image data from the left camera (L), one map de-
pending only on image data from the right camera
(R), and four maps depending on image data from
both cameras (4x A), we chose our 24 maps like this:
• L, R and all 2-element subsets from A (6 maps)
• L and all 3-element subsets from A (4 maps)
• R and all 3-element subsets from A (4 maps)
• All four A maps (1 map)
• L and all A maps (1 map)
• R and all A maps (1 map)
• L, R and all 3-element subsets of A maps (4 maps)
22
The RPi ComputeModule evaluation board offers nei-
ther an SD card slot nor Bluetooth and the one available
USB slot was needed for a Wi-fi USB stick.
23
We also did not receive an answer to our personal re-
quest for clarification.
• All 3-element subsets from A which contain the
first A map (3 maps)
This configuration yields the same number of kernels
and maps as in the original paper. Only the last 3
maps are somewhat arbitrarily chosen – for symmetry
we would have added three maps to get all 3-element
subsets from A in the last set.
Secondly, it was unclear how the two outputs for
steering were represented. We assumed a regression
task where each unit encodes the steering angle in
one direction (always positive between 0 and 1) while
the other unit would be set to zero. Straight forward
movement would be represented by both units being
set to zero. This corresponds to Reg2 in the results
table. We also formulated steering as a classification
problem, representing left, right and straight forward
as distinct classes. Left and right were determined at
a steering output of ±65 which corresponds to half
the maximum steering output of ±127. This vari-
ant corresponds to Cl3. For completeness sake we
also added a variant with a regression task and single
output unit that directly predicts the steering output
(±127). This was called Reg1.
Table 2 shows the results of the different variants
Reg1, Reg2 and Cl3 which only differ in the number
and interpretation of output units, on the two datasets
indoor and outdoor. Steering output is measured from
hard left (−127) to hard right (+127) with 0 being
straight forward movement. Columns Acc. ±X show
the corresponding accuracy when using a bin of 0± X
for the center class, and defining left and right class
accordingly. For estimating steering output from the
Cl3, we used a weighted sum of the estimated prob-
abilities for (left, center, right) where each class is
weighted by double the threshold initially used to de-
fined the classes (here 65 ∗ 2 = 130). Even this very
crude method to estimate steering output outperforms
both Reg1 and Reg2 by a large margin on accuracy,
and for indoor even on correlation.
24
Figure 5 shows the predicted steering output for
R2X and OUT versus the human steering output on
the test set. The first 2,000 samples are shown.
6 QUALITATIVE EVALUATION
For simplicity and because the results of the learning
experiments indicated that Cl3 was the best model, we
only deployed Cl3. Because of the very small FOV
24
Center bin size during training of Cl3 was ±65. For
Reg1 and Reg2 – because of the formulation as regression
problem – no bin size was used and raw steering output was
trained (normalized to [0,1] for Reg2 and [-1,1] for Reg1 via
division by 127)
Revisiting End-to-end Deep Learning for Obstacle Avoidance: Replication and Open Issues
657
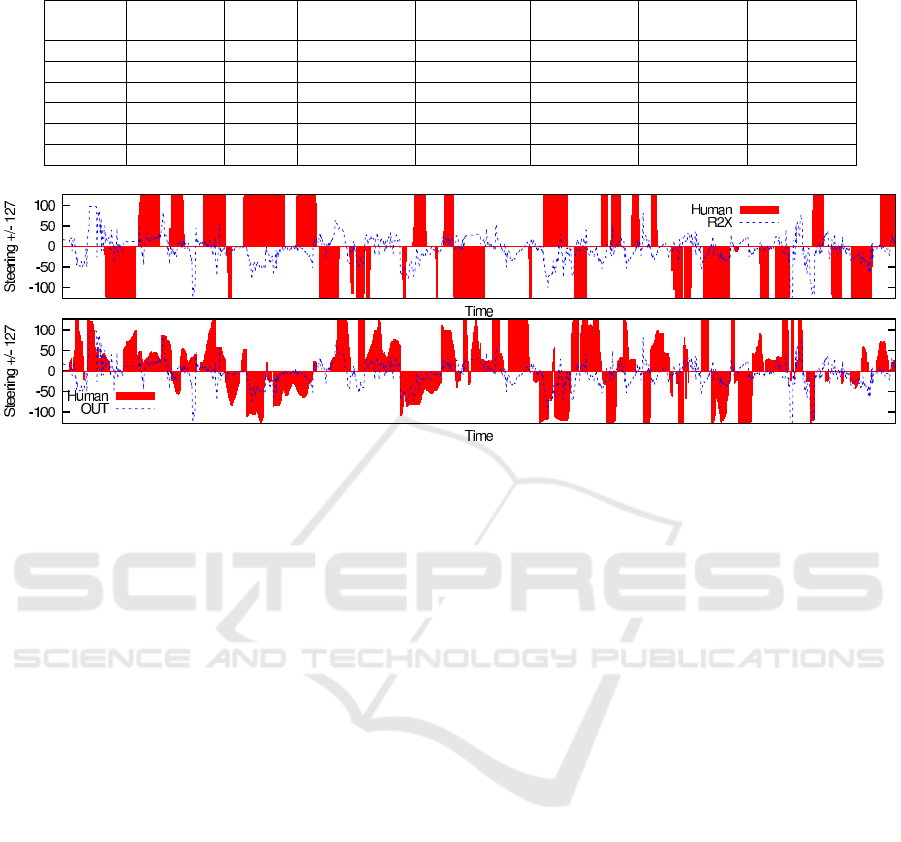
Table 2: Results of learning experiments.
Dataset #Samples Model
#Steps until
convergence
Correlation
coefficent
Acc. w/
center ±65
Acc. w/
center ±48
Acc. w/
center ±32
indoor 70,745 Cl3 305.5k 0.3945 59.93% 59.57% 59.05%
indoor 70,745 Reg2 102.0k 0.2353 49.31% 49.51% 47.29%
indoor 70,745 Reg1 118.0k 0.2144 48.29% 47.82% 45.98%
outdoor 27,368 Cl3 69.5k 0.1807 58.10% 50.27% 40.87%
outdoor 27,368 Reg2 193.7k 0.2783 55.97% 49.34% 43.13%
outdoor 27,368 Reg1 219.9k 0.2885 54.68% 47.74% 41.43%
Figure 5: Steering output on test set for robots R2X, OUT (top-to-bottom).
of K3D, we only deployed the indoor model to robot
R2X and the outdoor model to robot OUT.
During testing R2X we found that when directly
driving towards a wall, left and right directions are al-
ternately activated strongly (obviously both directions
are valid in this case) but cancel each other out since
the robot cannot react so speedily to steering com-
mands. Therefore we reduced the frame rate from 8 to
2 fps which improved the issue greatly at cost of less
responsive reactions. Generally the obstacle avoid-
ance performance is fair, however in some cases the
robot steers in the right direction but steers back at the
last moment. This may indicate that the training data
does not include sufficient examples with very near
obstacles. In some cases the steering action comes
far too late and can only be observed by analyzing
the video logs after each run. We also observed that
sometimes only one frame from a sequence of driv-
ing towards a wall shows left or right steering out-
put. Wall following behaviour was sometimes ob-
served – in some cases over prolonged periods. In
several cases complex obstacle avoidance behaviour
sequences were observed (such as driving below an
office chair without touching it) which indicates that
even this simple CNN can learn surprisingly complex
tasks. Still, the system cannot be considered fully au-
tonomous. About once every minute a manual inter-
vention was necessary (autonomy = 90%).
During testing OUT we found the model to per-
form quite well and exhibit fair to good obstacle
avoidance performance in extended test runs. Al-
though trained with a floor of green grass, it worked
as well with half of the floor covered by colorful au-
tumn leaves. The robot showed avoidance at large and
medium distances, however at short distances colli-
sions were quite frequent. Again we speculate that the
way data was collected prevented a sufficient sample
of very near obstacles. Sometimes collisions also hap-
pened when the obstacle was far away initially. Again
the system cannot be considered fully autonomous.
About once every two minutes a manual intervention
was necessary (autonomy = 95%).
We found that obstacle avoidance works better
in the outdoor setting, however this may be because
there are fewer and wider spaced obstacles. Also the
clutter problem (each image shows several levels of
obstacles at different distances) and the less diverse
object textures observed in indoor settings could ex-
plain why the outdoor task is simpler. Finally, the
local processing prevented any significant latency be-
tween frames and between frame recording and send-
ing the new steering output in the outdoor setting.
Surprisingly, we had far less training data for the
outdoor task and all evaluation measures were worse
there, so from this we would have expected the out-
door model to perform worse, which proved not to be
the case.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
658

7 DISCUSSION
One issue that may be limiting was the lack of con-
sistent training data. While human operators will try
their best to consistently drive the robot, boredom and
interindividual differences may yield changes in data
collection. One option would be to use other sen-
sors
25
to implement obstacle avoidance behaviour and
then using this system to collect large datasets for ob-
stacle avoidance training using direct or indirect in-
formation from these sensors. It might not be possible
to make the system completely autonomous, however
even an increased autonomy would help to make data
collection more efficient and more consistent.
Another issue is how to evaluate and compare
these systems. We can easily compare performance
of standardized datasets, however this is not always
meaningful (think of a robot driving straight towards
a wall – obviously both left and right steering are cor-
rect). For publicly available datasets it may be pos-
sible to overfit the test set, so the ability to gener-
ate arbitrary amounts of data should always be pre-
ferred. One option for almost autonomous systems
is the number of human interventions over time (Bo-
jarski et al. (2016)’s autonomy measure) – however
this is again dependent on human input or on the
availability of a perfect autonomous systems, which
is only feasible within a simulation setting. Another
way would be to combine a robust simultaneous lo-
calization and mapping system (SLAM, see e.g. Ca-
dena et al. (2016)) that creates a map and localizes
the robot, and using this data to evaluate more com-
plex measures such as average distance driven before
a collision, minimum distance to an obstacle per run
and number of collisions and near-misses.
Finally, larger deep learning networks pretrained
in related contexts (such as described by Khan and
Parker (2019)) may adapted to this task.
8 CONCLUSIONS
We replicated the findings of Muller et al. (2006) and
Muller et al. (2004), and found that they also apply to
some extent to indoor settings. We found that train-
ing the network in a classification setting yields bet-
ter results w.r.t. correlation and accuracy using dif-
ferent bin sizes versus training in a regression set-
ting. However, performance is not yet competitive
although the ability to use arbitrary sensors remains
intriguing. Lastly, we have introduced the ToyCollect
open source hardware and software platform.
25
E.g. ultrasound sensors which are already present on
robot OUT, perhaps augmented with bumper sensors
ACKNOWLEDGEMENTS
This project was partially funded by the Austrian Re-
search Promotion Agency (FFG) and by the Austrian
Federal Ministry for Transport, Innovation and Tech-
nology (BMVIT) within the Talente internship re-
search program 2014-2019. We would like to thank
all interns which have worked on this project, notably
Georg W., Julian F. and Miriam T. We would also
like to thank Lukas D.-B. for all 3D chassis designs
of robot R2X including the final one we used here.
REFERENCES
Bojarski, M., Del Testa, D., Dworakowski, D., Firner,
B., Flepp, B., Goyal, P., Jackel, L.D., Monfort,
M., Muller, U., Zhang, J., et al. (2016). End to
end learning for self-driving cars. Technical Report
1604.07316, Cornell University.
Cadena, C., Carlone, L., Carrillo, H., Latif, Y., Scaramuzza,
D., Neira, J., Reid, I., and Leonard, J. (2016). Past,
present, and future of simultaneous localization and
mapping: Towards the robust-perception age. IEEE
Transactions on Robotics, 32(6):1309–1332.
Hartbauer, M. (2017). Simplified bionic solutions: a simple
bio-inspired vehicle collision detection system. Bioin-
spir. Biomim., 12(026007).
Khan, M. and Parker, G. (2019). Vision based indoor obsta-
cle avoidance using a deep convolutional neural net-
work. In Proceedings of the 11th International Joint
Conference on Computational Intelligence - NCTA,
(IJCCI 2019), pages 403–411. INSTICC, SciTePress.
Muller, U., Ben, J., Cosatto, E., Fleep, B., and LeCun, Y.
(2004). Autonomous off-road vehicle control using
end-to-end learning. Technical report, DARPA-IPTO,
Arlington, Virginia, USA. ARPA Order Q458, Pro-
gram 3D10, DARPA/CMO Contract #MDA972-03-
C-0111, V1.2, 2004/07/30.
Muller, U., Ben, J., Cosatto, E., Fleep, B., and LeCun, Y.
(2006). Off-road obstacle avoidance through end-to-
end learning. In Advances in neural information pro-
cessing systems, pages 739–746.
Pfeiffer, M., Schaeuble, M., Nieto, J. I., Siegwart, R.,
and Cadena, C. (2016). From perception to de-
cision: A data-driven approach to end-to-end mo-
tion planning for autonomous ground robots. CoRR,
abs/1609.07910.
Seewald, AK. (2012). On the brittleness of handwritten
digit recognition models. ISRN Machine Vision, 2012.
Wang, Y., Dongfang, L., Jeon, H., Chu, Z., and Matson, ET.
(2019). End-to-end learning approach for autonomous
driving: A convolutional neural network model. In
Rocha, A., Steels, L., and van den Herik, J., editors,
Proc. of ICAART 2019, volume 2, pages 833–839.
Revisiting End-to-end Deep Learning for Obstacle Avoidance: Replication and Open Issues
659
