
Robust Perceptual Night Vision in Thermal Colorization
Feras Almasri
a
and Olivier Debeir
b
LISA - Laboratory of Image Synthesis and Analysis, Universit
´
e Libre de Bruxelles
CPI 165/57, Avenue Franklin Roosevelt 50, 1050 Brussels, Belgium
Keywords:
Colorization, Deep learning, Thermal images, Nigh Vision.
Abstract:
Transforming a thermal infrared image into a robust perceptual colour visual image is an ill-posed problem due
to the differences in their spectral domains and in the objects’ representations. Objects appear in one spectrum
but not necessarily in the other, and the thermal signature of a single object may have different colours in its
visual representation. This makes a direct mapping from thermal to visual images impossible and necessitates a
solution that preserves texture captured in the thermal spectrum while predicting the possible colour for certain
objects. In this work, a deep learning method to map the thermal signature from the thermal image’s spectrum
to a visual representation in their low-frequency space is proposed. A pan-sharpening method is then used to
merge the predicted low-frequency representation with the high-frequency representation extracted from the
thermal image. The proposed model generates colour values consistent with the visual ground truth when the
object does not vary much in its appearance and generates averaged grey values in other cases. The proposed
method shows robust perceptual night vision images in preserving the object’s appearance and image context
compared with the existing state-of-the-art.
1 INTRODUCTION
Humans have reasonable night vision with poor ca-
pabilities given improper environments. They have
poor vision in low light conditions but with the ad-
vantage of rich colour vision in better lighting con-
ditions. Human eyes have cone photoreceptor cells
which are colour perception sensitive and rod pho-
toreceptor cells which are receptive to brightness. The
cones are unable to adapt well in low lighting condi-
tions.
Colour vision is very important to the human
brain. It helps to identify objects and to understand
the surrounding environment. Studies (Cavanillas,
1999) (Sampson, 1996) have shown that human brain
interpretation with colour vision improves the accu-
racy and the speed of object detection and recognition
as compared to monochrome or false-colour visions.
Due to this biologically limited interpretability, arti-
ficial night vision has become increasingly important
in military missions, pharmaceutical studies, driving
in darkness, and in security systems.
The use of thermal infrared cameras has seen an
important increase in many applications, due to their
a
https://orcid.org/0000-0001-9321-6828
b
https://orcid.org/0000-0002-6461-1551
long wavelength which allows capturing the objects
invisible heat radiation despite lighting conditions.
They are robust against some obstacles and illumina-
tion variations and can capture objects in total dark-
ness. However, the human visual interpretability of
thermal infrared images is limited, and so transform-
ing thermal infrared images to visual spectrum images
is extremely important.
The mapping process from monochrome visual
images into colour images is called colorization,
which has been broadly investigated in computer vi-
sion and image processing (Isola et al., 2017) (Zhang
et al., 2016) (Larsson et al., 2016) (Guadarrama et al.,
2017). However, it is an ill-posed problem because
the two images are not directly correlated. A single
object in the grayscale domain has a single represen-
tation while it might have different possible colour
values in its true colour image counterpart. This is
also true in the thermal images with additional chal-
lenging problems. For instance, a single object with
different temperature conditions will have different
thermal signature that can correspond to a single-
colour value, while the thermal signature of two iden-
tical material objects at the same temperature condi-
tions will look identical in the thermal infrared im-
ages, but have different colour values in their visual
image counterpart.
348
Almasri, F. and Debeir, O.
Robust Perceptual Night Vision in Thermal Colorization.
DOI: 10.5220/0008979603480356
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
348-356
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
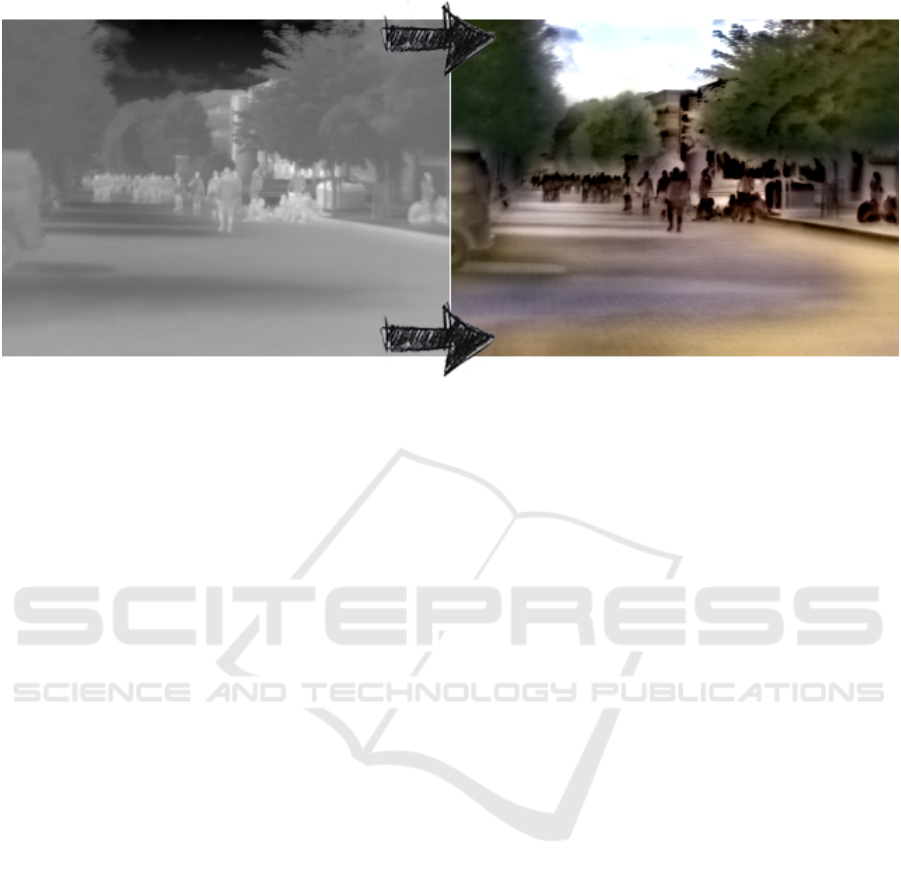
Figure 1: An example of mapping a thermal image to a color visual image is presented. (left): a thermal image from the
ULB17-VT.V2 test set, and, (right): its colorized counterpart. This approach generates color values consistent with the color
visual ground truth and preserves objects’ textures from the thermal representation.
Transforming thermal infrared images to visual
images is a very challenging task since they do not
have the same electromagnetic spectrums and so their
representations are different. In grayscale image col-
orization, the problem is to transform the luminance
values into only the chrominance values, while in
thermal image colorization, the problem requires esti-
mating the luminance and the chrominance given only
the thermal signature. Accordingly, a delivered solu-
tion should consider all of these challenges and also
provide a method for preserving the representation of
the objects in the thermal spectrum, while predicting
the possible colour of known relatively fixed in space
and time objects, such as the sky, tree leaves, street,
traffic signs.
This paper addresses the problem of transform-
ing the thermal images to consistent perceptual vi-
sual images using deep learning models. Our method
predicts the low-frequency information of the visual
spectrum images and preserves the high-frequency in-
formation from the thermal infrared images. A pan-
sharpening method is then used to merge these two
bands and creates a plausible visual image.
2 RELATED WORKS
Earlier grayscale image colorization required human
guidance to manually apply colour strokes to a se-
lected region or to give a reference image with the
same colour palette. This should help the model to
assume the similar neighborhood intensity values and
assign them a similar color, e.g. Scribble (Levin et al.,
2004), or Similar images (Welsh et al., 2002), (Ironi
et al., 2005). Recently, the successful applications
of convolutional neural networks (ConvNet) have en-
couraged researchers to investigate automatic end-to-
end ConvNet based model on the grayscale coloriza-
tion problem (Cao et al., 2017), (Iizuka et al., 2016),
(Cheng et al., 2015), (Guadarrama et al., 2017).
A few researchers have investigated the coloriza-
tion of near-infrared images (NIR) (Zhang et al.,
2018), (Limmer and Lensch, 2016) and have shown a
high performance, due to the high correlation between
the NIR and RGB images. Their two wavelengths dif-
fer only slightly in the red spectrum and thus they
have similar visual light representation correlated in
the red channel. In contrast, thermal images taken
from the long-wavelength infrared spectrum (LWI) do
not correlate with the visual images since they are
measured by the emitted radiation linked to the ob-
jects’ temperature. Therefore, predicting the colour
of an object in its thermal signature requires a local
and global understanding of the image context.
Recently Berg et al. (Berg et al., 2018) and Ny-
berg et al. (Nyberg, 2018) presented a fully automatic
ConvNet on a thermal infrared to RGB image col-
orization problem using different objective functions.
Their models illustrated a robust method against im-
age pair misalignment. However, the generated im-
ages suffer from a high blur effect and artefacts in
different locations in the images, e.g. missing objects
from the scene, object deformations and some failure
images. Kuang et al. in (Kuang et al., 2018) used a
conditional generative adversarial loss to generate a
realistic visual image, with the perceptual loss based
on the VGG-16 model, the TV loss to ensure spatial
Robust Perceptual Night Vision in Thermal Colorization
349
smoothness, and the MSE as content loss. Their work
presented better realistic colour representations with
fine details but also suffered from the same artefacts,
missing objects and object deformations.
The previous works were trained on the KAIST-
MS dataset (Hwang et al., 2015) which consists of
95,000 thermal-visual images captured from a device
mounted on a moving vehicle. Images were captured
during day and night by a thermal camera with an out-
put size of 320x256 and interpolated to have the same
size as the visual images (640x512) using an unknown
method and normalized using an unknown histogram
equalization method. The procedure used to train the
models in previous work reduces the size of the ther-
mal images to their original size and then trains the
models only on day time images. The frames were
extracted from the video sequence, so it should be
considered that, several subsequent images are very
similar in most of the sets and it is possible to over-
fit the dataset. It is also possible that the equalization
coupled with the rescaling methods changed the ther-
mal value distribution. Therefore, the proposed model
is also trained on the ULB17-VT dataset (Almasri and
Debeir, 2018) which contains raw thermal images.
3 METHOD
For this work, the target is to transform the thermal in-
frared images from their temperature representations
to colour images. For this reason, this work builds
on existing works that have looked at the thermal col-
orization problem and uses the proposed network ar-
chitecture by Berg et al. (Berg et al., 2018) with small
modifications adapted to our outputs.
Preprocessing steps are assumed necessary when
the ULB17-VT dataset is used. Images are normal-
ized to [0− 1] using instance normalization in contrast
with the KAIST-MS dataset which used histogram
equalization. Spikes that occur with sharp low/high
temperatures are detected and smoothed using a con-
volution kernel.
The method proposed here is to transform the ther-
mal image to low-frequency (LF) information in the
colour visual image space in a match with the LF in-
formation in the ground truth visual image. The fi-
nal colourized image is acquired by applying a post-
processing pansharpening step. This process is done
by merging the predicted visual LF information with
the high-frequency (HF) information extracted from
the input thermal image. This step is assumed nec-
essary to maintain an object’s appearance from the
thermal signature and to preserve it in the predicted
colourized images. It also helps avoid high artefact
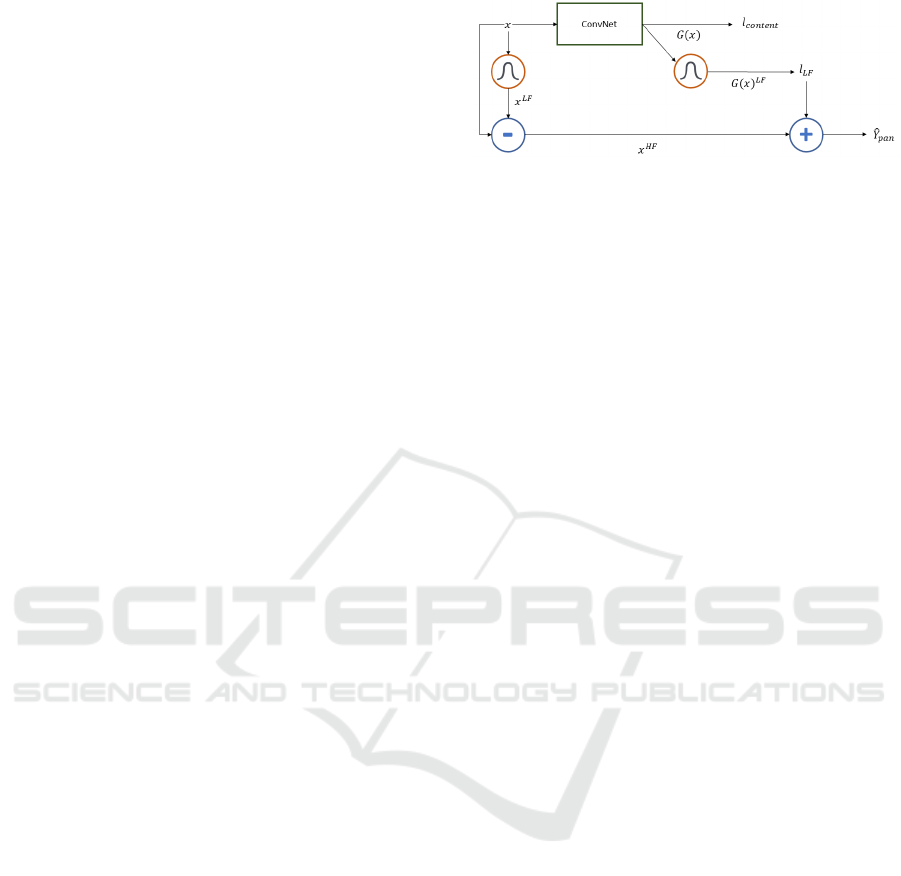
Figure 2: Proposed Model. Model (G) in orange is the
Gaussian layer.
occurrences when object representations are different
between the two spectrums.
3.1 Proposed Model
The proposed model, as illustrated in Fig. 2, takes the
thermal image as input and generates a fully colour-
ized visual image. For this generated output, L1 con-
tent loss l
content
is used as an objective function to
measure the dissimilarities with the ground truth vi-
sual image. The low-frequency information is then
obtained from the generated colourized image G(x)
LF
and from the ground truth visual image Y
LF
by ap-
plying a Gaussian convolution layer with a kernel of
width 25 x 25 and σ = 12. The dissimilarities between
the LF information of the two images is measured us-
ing the objective function l
l f
which is the MSE loss.
The total loss is a weighted sum of the L1 and MSE
multiplied by α = 10 since the MSE loss value is
smaller than L1.
l
total
= l
content
+ α · l
l f
(1)
3.2 Representation and Pre-processing
The pansharpening method is used as shown in Fig. 2
as a final post-processing step. The thermal low-
frequency information x
LF
is first obtained by ap-
plying a Gaussian layer on x. The thermal high-
frequency information x
HF
is then extracted by sub-
tracting x
LF
from x. The thermal image is represented
with three channels in order to add them to the visual
RGB images. The final colourized thermal image
ˆ
Y
pan
is obtained by adding the input x
HF
weighted by λ to
the generated low-frequency information G(x)
LF
as:
ˆ
Y
pan
= G(x)
LF
+ λx
HF
(2)
The pansharpening method is first applied on the
ground truth visual images to experience and visual-
ize the pan-sharped colourized images before training
the model. The thermal signature of the sky in the
thermal images is very low with respect to other ob-
jects, while humans and other heated objects have a
higher thermal signature. The normalization process
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
350

Figure 3: Boxplot of PSNR for λ = 0, 1, 2, 3, 4, 5 on ULB17-
VT.V2 test set and on KAIST-MS set00-V000 set.
(a) λ = 0 (b) λ = 1
(c) λ = 2 (d) λ = 3
Figure 4: Pansharpening visualization from KAIST-MS
dataset on S6V0I00000 with λ = 0, 1, 2, 3.
makes the sky values very close to zero, while in the
visual images this value should be around one. For
this reason, the thermal infrared images are inverted
before any processing which results in a value around
one for the sky in the thermal images.
The proposed method relies on maintaining the
high-frequency information taken from the thermal
images, as this can reduce the evaluation results com-
pared to the state-of-the-art when the pixel-wise mea-
surement is used. For validation purposes, the PSNR
between
ˆ
Y
pan
and y with λ = 0, 1, 2, 3, 4, 5 was mea-
sured as shown in Fig. 3. This gives an idea of the
maximum validation value that can be achieved us-
ing the proposed model. The synthesised images are
represented as a perceptual visualization quality as
shown in Fig. 4. The value λ = 3 was chosen as
a trade-off between better perceptual image quality
and a reasonable PSNR with the average of 14.5 for
ULB17-VT.V2 and 12.31 for KAIST-MS. If λ is de-
creased the PSNR value increases, but with less plau-
sible perceptual images.
When the weighted thermal HF information is
added to the visual LF information, the synthesized
image could have values out of the band [0 − 1] in
some areas. This results in a black or white color ef-
fect when the image is clipped to the range [0 − 1] as
shown in the red rectangle in Fig. 4. Re-normalizing
the image instead of clipping can reduce the image
contrast or affect the true colour values since the low
frequency information on the three RGB channels
is being obtained and added. This problem can be
solved by exploring different normalization methods
in the pre-processing step and different merging pro-
cedures in the post-processing step.
De-spiked thermal images are obtained using a
convolution kernel of width 5 x 5, which replaces the
centre pixel with the median value if the pixel value is
three times greater than the standard deviation of the
kernel area.
3.3 Networks Architecture
The network architecture proposed in (Berg et al.,
2018) from their repository was used.
1
. Two mod-
els were trained as follows:
• TICPan-Bn The proposed method using the net-
work architecture in (Berg et al., 2018).
• TICPan The proposed method using the same net-
work architecture, and replacing the batch nor-
malization layer with the instance normalization
layer. It shows better enhancement in colour rep-
resentations and in the metric evaluations.
4 EXPERIMENTS
4.1 Dataset
For this work the ULB17-VT dataset (Almasri and
Debeir, 2018) which contains 404 visual-thermal im-
age pairs was used. The number of images was in-
creased to 749 visual-thermal images using the same
device and 74 pairs were held for testing. Thermal
images were extracted in their raw format and logged
in with 16-bit float per-pixel. This new dataset, ULB-
VT.v2, is available on
2
.
The KAIST-MS dataset (Hwang et al., 2015) was
also used and the exiting works on thermal coloriza-
tion problem were followed. Training was only done
on day time images and resized the thermal images to
their original resolution of 320 x 256 pixels. The im-
ages in KAIST-MS were recorded continuously dur-
ing driving and stopping the car. This results in a high
1
https://github.com/amandaberg/TIRcolorization
2
http://doi.org/10.5281/zenodo.3578267
Robust Perceptual Night Vision in Thermal Colorization
351

number of redundant images and explains the over-
fitting behaviour and the failure results in previous
work. For this reason, only every third image is taken
in the training set to yield a set with 10,027 image
pairs, while all of the images in the test set are used.
4.2 Training Setup
All experiments were implemented in Pytorch and
performed on an NVIDIA TITAN XP graphics card.
TIR2Lab (Berg et al., 2018) and TIC-CGAN (Kuang
et al., 2018) were re-implemented and trained as ex-
plained in the original papers.
The proposed model, TICPan, trained using
ADAM optimizer with default Pytorch parameters
and weights were initialized with He normal initial-
ization (He et al., 2015). All experiments were trained
for 1000 epochs and the learning rate was initial-
ized with 8e
−4
with decay after 400 epochs. The
LeakyReLU layers parameter was set to α = 0.2 and
the dropout layer was set to 0.5.
In each training batch, 32 cropped images of size
160 x 160 were randomly extracted. For each iter-
ation, a random augmentation was applied by flip-
ping horizontally or vertically and rotating in the
[−90
◦
, 90
◦
]. Since the number of training images in
KAIST-Ms is 14 times more than ULV-VT.v2, the
number of iterations for the model to train on the
ULV-VT.v2 was increased to match the model trained
on KAIST-MS.
For validation, the peak signal-to-noise ratio
(PSNR), structural similarity (SSIM) and root-mean-
square error (RMSE) were used between the gener-
ated colorized images and the true images.
4.3 Quantitative Evaluation
The proposed model was evaluated on transforming
thermal infrared images to RGB images compared
with the state-of-the-art using the measurement met-
rics shown in Table 1.
The proposed model evaluation was performed on
the full colorized thermal image, which is the result
of the fusion of the predicted visual LF information
and the input thermal HF information. This resulted
in a higher pixel-wise error compared to other models
since the HF content of the image was taken from the
thermal domain. However, our method achieved com-
parable results with the synthesized images as shown
in Fig. 3.
It is believed that the pixel-wise metrics are not
suitable for the colorization problem where the per-
ception of the image has an important role. The
TIR2Lab achieved higher evaluation values while
their generated images are uninterruptable. TIC-
CGAN has 12.266 million parameters that explain
the overfitting behaviour in its generated images.
TICPan-BN was excluded because it has the lowest
evaluation values and less comparable quality images.
4.4 Qualitative Evaluation
Four examples are presented in Fig. 8 on the ULB17-
VT.v2 dataset. The TIR2Lab model generated ap-
proximated good colour representations for trees with
blur effect but failed to produce fine textures and to
preserve the image content. On the hand, the TIC-
CGAN model generated better image colour quality
with fine textures and were more realistic. This is
very recognizable, as an over-fitting behaviour, when
the test image comes from the same distribution as the
densely represented images in the training set such as
image number (650).
TICPan generates images that have strong true
colour values for objects that are relatively fixed in
space and time, such as sky, tree leaves, and streets
and buildings. Sky is represented in white or light
blue colour, trees are in different shades of green, and
streets and buildings also represented with approxi-
mated true colour values. However, objects like hu-
mans are represented in grey or in black due to the
clipping effect. Our method assures that the object
thermal signature does not disappear in image trans-
formation or get deformed. The model cannot pre-
dict true colour values for the varying objects but it
predicts an averaged colour value represented in grey
and the final pansharpening process maintains their
appearance in the generated colourized images.
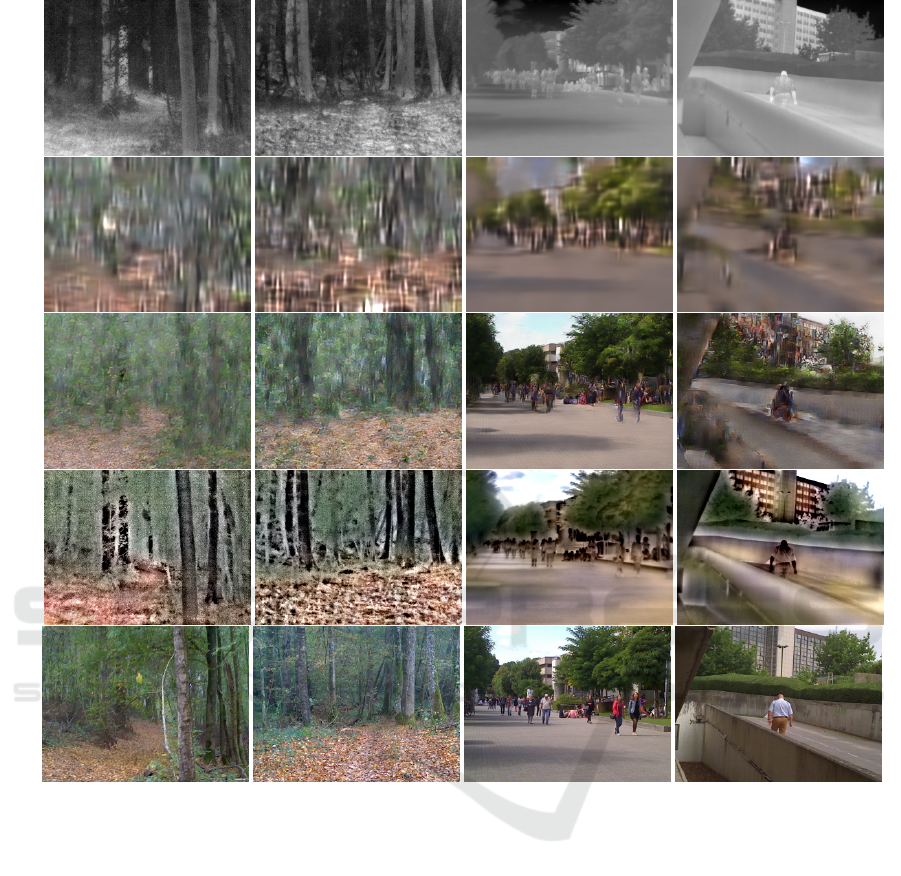
In Fig. 9 four examples are presented on the
KAIST-MS dataset. The TIR2Lab method produced
approximate good true chrominance values but it has
heavily blurred images and suffers from recovering
fine textures accurately. The produced artefacts are
very obvious in the generated images and some ob-
jects, such as the walking person in (S6V3I03016)
are missing in their outputs. The TIC-CGAN model
produced better perceptual colourized thermal images
with realistic textures and fine details, but they suffer
from the same countereffects of missing objects and
objects deformation. This is due to the use of GAN
adversarial loss which learns the dataset distribution
and estimates what should appear in each location,
and also because of the large size of the model and its
over-fitting behaviour. This is seen in (S8V2I01723)
in the falsely generated road surface markings and in
the missing person in (S6V3I03016). In contrast, the
proposed TICPan model does not generate very plau-
sible colour values in the KAIST-MS dataset but it
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
352
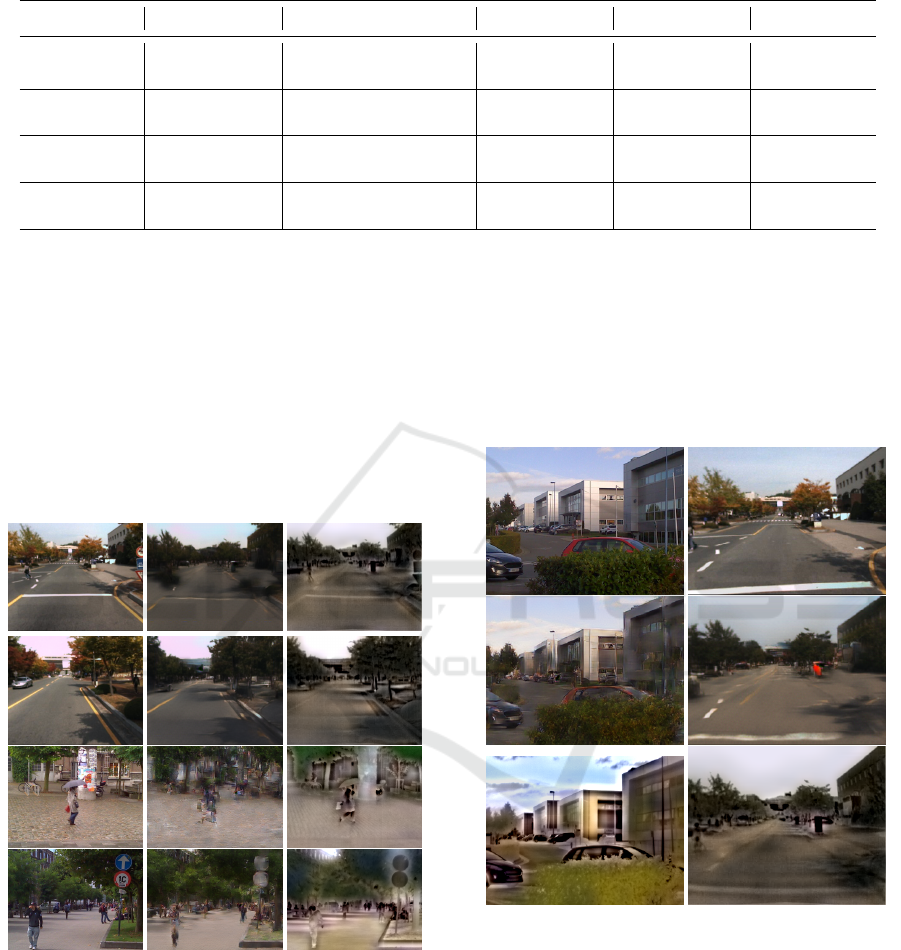
Table 1: Average evaluation results on 74 images in ULB-VT version 2 dataset and 29,179 images in KAIST-MS dataset.
Model Parameters Dataset PSNR SSIM RMSE
TIR2Lab 1.46M
ULB-VT.V2 14.404 0.335 0.194
KAIST-MS 14.090 0.565 0.204
TIC-CGAN 12.266M
ULB-VT.V2 15.475 0.313 0.174
KAIST-MS 16.010 0.552 0.165
TIC-Pan-BN 1.46M
ULB-VT.V2 12.559 0.215 0.239
KAIST-MS 12.944 0.373 0.228
TIC-Pan 1.46M
ULB-VT.V2 13.078 0.228 0.226
KAIST-MS 13.922 0.404 0.205
generates robust perceptual night vision images that
maintain objects’ appearances.
4.4.1 Deformation and Missing Objects
Fig. 9 shows missing objects in the TIC-CGAN gener-
ated images, such as the person in (S0V0I00601) and
the cars in (S0V0I01335). We can also recognize the
object deformation in image number (428) and image
number (598), while in the TICPan model objects are
retained in the generated images.
Figure 5: From left to right: True RGB, TIC-CGAN
and TICPan. From top to bottom: (S0V0I00601) and
(S0V0I01335) form KAIST-MS and (428) and (598) from
ULB-VT.v2.
4.4.2 Overfitting Behavior
Fig. 6 illustrates the over-fitting problem in the TIC-
CGAN model. Because of its size, it has 12M param-
eters and is 12 times bigger than the proposed model.
This makes it very easy for the model to overfit the
dataset and not perform generalisation in the unseen
data. In image number (1250), the model can pre-
dict the exact colour of the two cars because a sim-
ilar image appeared in the training set. In the sec-
ond image number (S0V0I00613), whenever an ob-
ject comes from the left with a size similar to a bus,
the model will predict it as a bus with red colour. The
TICPan model cannot predict the exact colour of cars,
but instead generates an average grey colour.
Figure 6: From left to right: (1250) from ULB-VT.v2 and
(S0V0I00613) from KAIST-MS test set. From top to bot-
tom: True RGB, TIC-CGAN and TICPan.
4.4.3 Night Vision
The TIC-CGAN model failed to generate inter-
pretable images using images that were taken at night,
because the image distribution and the image con-
trast were different from the training images. How-
ever, the TICPan model does not suffer from this fail-
ure thanks to the pansharpenning process as shown in
Fig. 7. In image number (1784), the true RGB image
is completely dark and the TICPan model generates a
Robust Perceptual Night Vision in Thermal Colorization
353

robust perceptual night vision image as compared to
the TIC-CGAN model. This is also illustrated in im-
age number (S9V0I00000), where the TICPan model
generates a night vision image with less artefacts than
the TIC-CGAN model. It should be noted that these
artefacts are due to the histogram equalization method
used in KAIST-MS.
5 CONCLUSIONS
The objective in this study was to address the prob-
lem of transforming thermal infrared images to visual
images with robust perceptual night vision quality. In
contrast to the existing methods that map images auto-
matically from their thermal signature to chrominance
information, our proposed model seeks to maintain
the appearance of objects in their thermal representa-
tion from the thermal images and to predict possible
colour values.
The evaluation showed that the proposed model
has better perceptual images with fewer artefacts and
the best representation for night images. This con-
firms the model generalization capability. The gener-
ated images are robust and reliable enabling users to
better interpret the images while using night vision.
For objects or cases in which missing or deformed
objects can cause dramatic accidents, the pan sharp-
ening process is of critical necessity.
ACKNOWLEDGEMENTS
This work was supported by the European Regional
Development Fund (ERDF) and the Brussels-Capital
Region within the framework of the Operational Pro-
gramme 2014-2020 through the ERDF-2020 project
F11-08 ICITY-RDI.BRU. We thank Thermal Focus
BVBA for their support.
REFERENCES
Almasri, F. and Debeir, O. (2018). Multimodal sensor fu-
sion in single thermal image super-resolution. arXiv
preprint arXiv:1812.09276.
Berg, A., Ahlberg, J., and Felsberg, M. (2018). Generat-
ing visible spectrum images from thermal infrared. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition Workshops, pages 1143–
1152.
Cao, Y., Zhou, Z., Zhang, W., and Yu, Y. (2017). Unsuper-
vised diverse colorization via generative adversarial
networks. In Joint European Conference on Machine
Figure 7: From top to bottom: Thermal image, TIC-CGAN
and TICPan. Left (S9V0I00000) from KAIST-MS and right
(1784) ULB-VT.v2.
Learning and Knowledge Discovery in Databases,
pages 151–166. Springer.
Cavanillas, J. A. A. (1999). The role of color and false color
in object recognition with degraded and non-degraded
images. Technical report, NAVAL POSTGRADUATE
SCHOOL MONTEREY CA.
Cheng, Z., Yang, Q., and Sheng, B. (2015). Deep coloriza-
tion. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 415–423.
Guadarrama, S., Dahl, R., Bieber, D., Norouzi, M., Shlens,
J., and Murphy, K. (2017). Pixcolor: Pixel recursive
colorization. arXiv preprint arXiv:1705.07208.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delv-
ing deep into rectifiers: Surpassing human-level per-
formance on imagenet classification. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 1026–1034.
Hwang, S., Park, J., Kim, N., Choi, Y., and So Kweon, I.
(2015). Multispectral pedestrian detection: Bench-
mark dataset and baseline. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1037–1045.
Iizuka, S., Simo-Serra, E., and Ishikawa, H. (2016). Let
there be color!: joint end-to-end learning of global and
local image priors for automatic image colorization
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
354
Thermal imageTIR2LabTIC-CGANTICPan
Visual image
1508 1476 650 248
Figure 8: Examples of colorized results on ULB-VT.v2 test set. The numbers represent the image names.
with simultaneous classification. ACM Transactions
on Graphics (TOG), 35(4):110.
Ironi, R., Cohen-Or, D., and Lischinski, D. (2005). Col-
orization by example. In Rendering Techniques, pages
201–210. Citeseer.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
1125–1134.
Kuang, X., Sui, X., Liu, C., Liu, Y., Chen, Q., and Gu,
G. (2018). Thermal infrared colorization via condi-
tional generative adversarial network. arXiv preprint
arXiv:1810.05399.
Larsson, G., Maire, M., and Shakhnarovich, G. (2016).
Learning representations for automatic colorization.
In European Conference on Computer Vision, pages
577–593. Springer.
Levin, A., Lischinski, D., and Weiss, Y. (2004). Col-
orization using optimization. In ACM transactions on
graphics (tog), volume 23, pages 689–694. ACM.
Limmer, M. and Lensch, H. P. (2016). Infrared coloriza-
tion using deep convolutional neural networks. In
2016 15th IEEE International Conference on Machine
Learning and Applications (ICMLA), pages 61–68.
IEEE.
Nyberg, A. (2018). Transforming thermal images to visible
spectrum images using deep learning.
Sampson, M. T. (1996). An assessment of the impact of
fused monochrome and fused color night vision dis-
plays on reaction time and accuracy in target detec-
tion. PhD thesis, Monterey, California. Naval Post-
graduate School.
Welsh, T., Ashikhmin, M., and Mueller, K. (2002). Trans-
ferring color to greyscale images. In ACM transac-
tions on graphics (TOG), volume 21, pages 277–280.
ACM.
Robust Perceptual Night Vision in Thermal Colorization
355
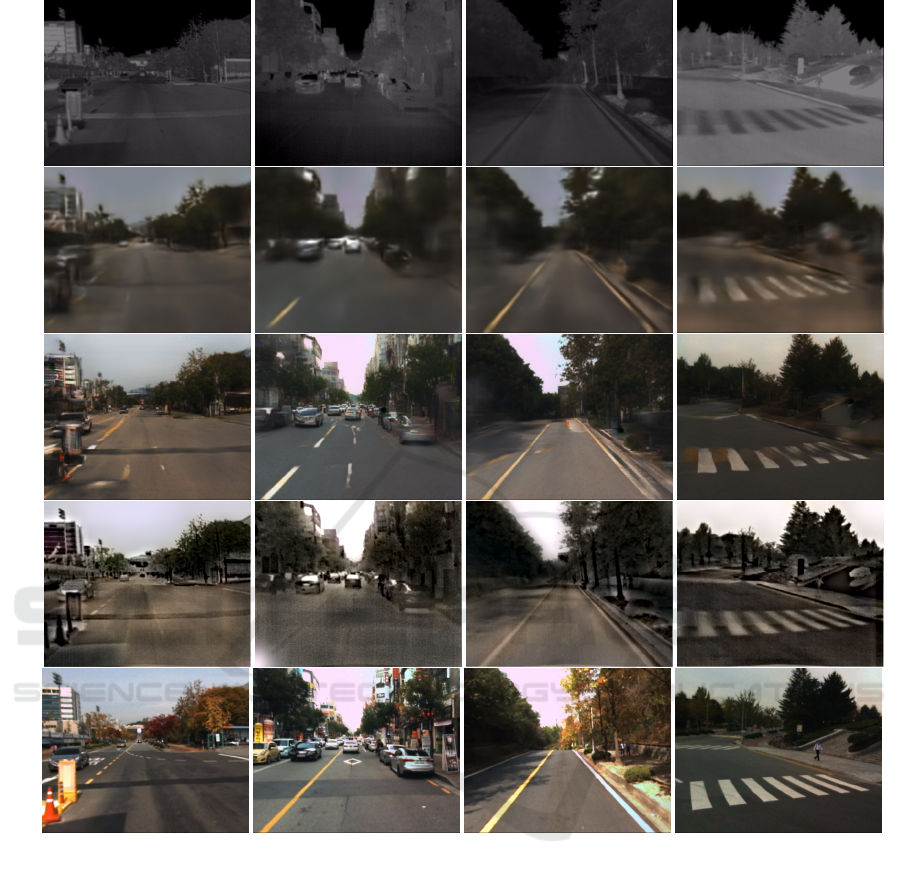
Thermal imageTIR2LabTIC-CGANTICPan
Visual image
S6V0I00000 S8V2I01723 S6V2I00188 S6V3I03016
Figure 9: Examples of colorized results on KAIST-MS test set. The numbers represent the image place and their names.
Zhang, R., Isola, P., and Efros, A. A. (2016). Colorful im-
age colorization. In European conference on computer
vision, pages 649–666. Springer.
Zhang, T., Wiliem, A., Yang, S., and Lovell, B. (2018). Tv-
gan: Generative adversarial network based thermal to
visible face recognition. In 2018 International Con-
ference on Biometrics (ICB), pages 174–181. IEEE.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
356
