
CAD-based Learning for Egocentric Object Detection in Industrial
Context
Julia Cohen
1,2
, Carlos Crispim-Junior
1
, C
´
eline Grange-Faivre
2
and Laure Tougne
1
1
Univ. Lyon, Lyon 2, LIRIS, F-69676 Lyon, France
2
DEMS, Saint Bonnet de M
ˆ
ure, France
Keywords:
Egocentric, Database Generation, Object Detection.
Abstract:
Industries nowadays have an increasing need of real-time and accurate vision-based algorithms. Although the
performance of object detection methods improved a lot thanks to massive public datasets, instance detection
in industrial context must be approached differently, since annotated images are usually unavailable or rare.
In addition, when the video stream comes from a head-mounted camera, we observe a lot of movements and
blurred frames altering the image content. For this purpose, we propose a framework to generate a dataset of
egocentric synthetic images using only CAD models of the objects of interest. To evaluate different strategies
exploiting synthetic and real images, we train a Convolutional Neural Network (CNN) for the task of object
detection in egocentric images. Results show that training a CNN on synthetic images that reproduce the
characteristics of egocentric vision may perform as well as training on a set of real images, reducing, if not
removing, the need to manually annotate a large quantity of images to achieve an accurate performance.
1 INTRODUCTION
Object detection in images is an interesting challenge
with a wide range of applications. Video surveillance,
autonomous driving or robotics are examples of the
domains that need to recognize objects, in order to au-
tomate tasks or perform quality control (Agin, 1980;
Malamas et al., 2003). We are interested in detecting
objects for augmented reality (AR) applications. Re-
cently, AR technologies have spread out to our every-
day lives (Van Krevelen and Poelman, ), overlaying
virtual content onto the reality with wearable and mo-
bile devices. This is particularly useful for industrial
tasks, since it enables to visualize additional infor-
mation during maintenance or assembly tasks (Gav-
ish et al., 2015; Evans et al., 2017). Smartphones
and tablets used as AR displays occupy the hands of
the user and require to move repeatedly ones attention
from the screen to the workstation. On the contrary,
head-mounted displays such as AR glasses or head-
sets enable to visualize virtual objects at eye-level,
hands-free. Head-mounted displays usually embed
one or several cameras following the worker’s head
movements, showing fast changes in the image con-
tent and illumination, as well as motion blurring (Fig-
ure 1). These challenges, specific to the domain of
egocentric vision, are already being investigated by
researchers, especially for the automatic analysis of
daily activities (Nguyen et al., 2016; Damen et al.,
2018).
While these works focus on the relationship be-
tween daily objects and actions in egocentric videos,
we are interested in specific objects in an industrial
context, in order to project the adequate virtual con-
tent onto the head-mounted display. Unlike existing
solutions, we need a system that adapts to different
indoor environments, objects materials and shapes.
Also, there is no possibility to adjust the working
area with artificial markers, leaving out of the scope
marker-based AR methods. Several works tackle this
problem, but they usually rely on specific conditions,
e.g., a planar surface and static scene (Klein and Mur-
ray, 2007). Given the recent success of deep learning
in many vision tasks, we use a Convolutional Neu-
ral Network (CNN) for the task of object detection in
egocentric images. Using large databases, CNNs are
able to recognize objects with varying shape, pose,
texture or material. However, in industrial context,
target objects are industrial pieces manufactured for
specific products, for which it is difficult to acquire
and annotate a large number of data. In this work,
we exploit the 3D CAD models of the objects of in-
terest to automatically generate an egocentric syn-
thetic database. Although using CAD models to de-
644
Cohen, J., Crispim-Junior, C., Grange-Faivre, C. and Tougne, L.
CAD-based Learning for Egocentric Object Detection in Industrial Context.
DOI: 10.5220/0008975506440651
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
644-651
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
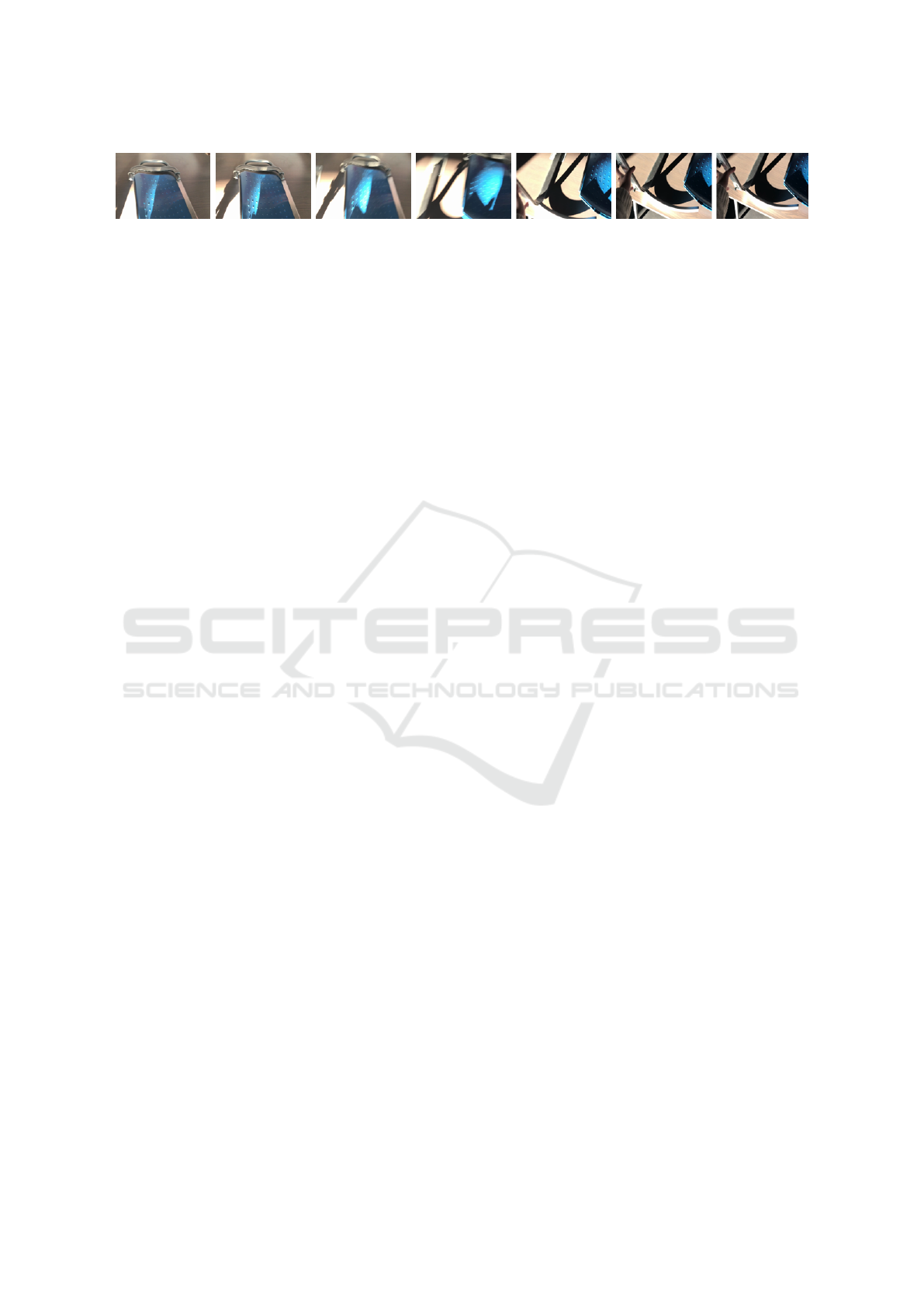
Figure 1: Consecutive frames extracted from an egocentric video (30fps) where a bus seat is being assembled.
tect or classify objects in images is not a new ap-
proach (B
¨
ohm et al., 2000; Ulrich et al., 2001; Toshev
et al., 2009; Langlois et al., 2018), only few methods
combine deep learning methods and 3D models for
the task of instance detection (detection of a specific
object instead of a class), and without real images.
To the best of our knowledge, no prior work has been
done to detect industrial object instances from an ego-
centric point of view and using only synthetic images.
Building on previous works presented in Sec-
tion 2, we propose a method to generate a synthetic
dataset using CAD models as the only input, and we
study different learning strategies (Section 3). We
tailor our approach towards images from an egocen-
tric viewpoint where hand-held objects are truncated
and head motion contributes to blur the images. Af-
ter generating a synthetic dataset, we train the CNN
YOLOv3 (Redmon and Farhadi, 2018) and evaluate
its ability to detect objects in real images. Especially,
we compare the performance of training on a large
dataset of synthetic images and a small dataset of real
images, and we study the contribution of motion and
Gaussian types of blur in the synthetic dataset, to re-
duce the gap between synthetic and real domains. Ex-
periments are described in Section 4, and results in
Section 5. Section 6 concludes this work.
2 RELATED WORK
CAD models were first used for classification and lo-
calization tasks by matching hand-crafted feature vec-
tors from the model or its 2D projection to a range or
color image (Qin et al., 2014; B
¨
ohm et al., 2000; Ul-
rich et al., 2001; Toshev et al., 2009). Then, CNNs
were fed directly with 3D data as a grid of voxels
(Maturana and Scherer, 2015; Wu et al., 2015) or
as an octree (Wang et al., 2019). Encouraged by the
availability of large databases such as ModelNet (Wu
et al., 2015) and PASCAL3D+ (Xiang et al., 2014),
these CNNs serve as feature extractors for any vision-
based task, or they are tailored towards a specific task
as classification or pose estimation. A different ap-
proach is to render the CAD models to obtain a collec-
tion of 2D views with known pose to feed the CNN,
for pose estimation or refinement for example (Su
et al., 2015; Kehl et al., 2017; Sundermeyer et al.,
2018; Langlois et al., 2018). These views can be used
as a form of data augmentation to complement a small
or imbalanced dataset (Peng et al., 2015), or as the
only source of data. We focus on this approach to train
an object detector using only RGB images, removing
the need to reconstruct a 3D scene. On the same line
as (Sarkar et al., 2017), we perform instance detection
with real images unavailable or in reduced number,
with a training set built entirely from one CAD model
per object. Unlike them, our objects are being manip-
ulated from an egocentric viewpoint and not lying on
a table.
The domain gap between synthetic and real im-
ages is another challenge: a CAD model has sharp
edges and visible details, while a real image quality
depends a lot on the camera characteristics. While
we can learn from a small set of real images the best
parameters to generate synthetic images (Rozantsev
et al., 2015), we still need images from the target
domain. Several works (Massa et al., 2016; Inoue
et al., 2018; Planche et al., 2019) proposed to bridge
the gap between real and synthetic data by giving the
real images a synthetic aspect, whereas our approach
is to make synthetic images similar to real ones. To
tackle the challenge of cross-domain transfer learn-
ing, (Chu et al., 2016) proposed to take advantage of
networks pre-trained on massive datasets such as Im-
ageNet (Deng et al., 2009), showing experimentally
the performance improvement. However, their source
and target domains both contain real images.
In this work, we generate synthetic images from
CAD models with a special attention on egocentric
characteristics. Then, we compare different learning
strategies with or without real and synthetic data, pre-
trained weights, blur and shadows.
3 PROPOSED METHOD
First, we introduce our method to generate an egocen-
tric synthetic dataset, simulating visual cues represen-
tative of real egocentric images. Then, we present the
different training strategies evaluated.
3.1 Synthetic Images Generation
We create images containing variability in viewpoint,
illumination, truncation and blurring. Although we
CAD-based Learning for Egocentric Object Detection in Industrial Context
645

Figure 2: Synthetic dataset generation. Details in Section 3.1.
focus on instance detection, the generated dataset can
be used for other vision-based tasks.
3.1.1 Rendered Views
For each object of interest, a textureless CAD model
is rendered at the origin of a 3D scene. A virtual
camera is placed at several positions, with its opti-
cal axis pointing at the object, without varying the
camera parameters or simulating artifacts as in other
works (Klein and Murray, 2009). To obtain equally
distributed camera positions, we apply the method
introduced in (Hinterstoisser et al., 2008), in which
the viewpoints are sampled from an icosahedron: the
initial triangular faces are iteratively subdivided into
4 smaller triangles in the refinement step, providing
a finer sampling of the 3D space (Figure 2-A). The
model does not need resizing at this point. While
thousands of poses are required for pose estimation,
(Wohlhart and Lepetit, 2015; Kehl et al., 2017), much
less poses are necessary for object detection. With
this sampling method, we can obtain 12, 42 or 162
poses with 0, 1 or 2 levels of refinement (level 0 cor-
responding to the initial icosahedron vertices). We
render the scene with the camera placed at each of
the viewpoints. The resulting ”views” cover two out-
of-plane rotation angles; the third one is obtained
by in-plane rotation in a subsequent step. We add
visual variations by changing the color of our non-
textured models: we empirically defined 12 colors,
from which 5 are randomly selected for each camera
pose (Figure 2-B). The lighting is a simple point light,
emitting in all directions and creating reflections for
certain colors and camera positions.
3.1.2 Background Compositing
Previous works (Peng et al., 2015; Sarkar et al., 2017)
have shown better results when the synthetic images
have a real background. We apply this strategy by
adding the synthetic views into images of real scenes.
The annotation is automatically created during this
step. In previous works, the background images are
retrieved from large databases with constraints such
as ”indoor location” and removing images with ob-
jects similar to the target objects. Since usual datasets
do not contain images from our target domain, we
manually retrieved 50 images from online databases
corresponding to keywords like ”industrial”, ”manu-
facturing”, or ”workplace” (Figure 2-D).
3.1.3 Framework
To create synthetic images, we apply the framework
in Figure 2. First, we randomly select and augment a
background image with domain randomization tech-
niques: we crop and resize the image, modify the
pixel values, apply random contrast normalization,
horizontal and vertical flipping, and motion blur (Fig-
ure 2-E). Then, a view is selected, resized, and its lo-
cation on the background image is randomly defined
(Figure 2-C). We allow a third of the object width and
height to fall outside the boundaries of the image, in
order to simulate truncated objects as they appear in
egocentric images (Figure 2-F). The view is also aug-
mented with random rotation and pixel multiplication,
and it is projected onto the background image, before
adding Gaussian noise to smooth the object contours
(Figure 2-G). Finally, to bridge the gap between syn-
thetic and real images, we simulate movements with
either Gaussian or motion blur (Figure 2-H). Gaus-
sian blur is applied with a zero-mean and a standard
deviation between 5 and 12, motion blur with a ker-
nel of size between 10 and 80, random angle and di-
rection of motion. We simulate shadows with semi-
transparent black shapes blended on top of the images
(Figure 2-I). Although the shadows do not look real-
istic, they add variability in the objects colors.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
646

3.2 Learning Strategies
Typically, a CNN for object detection is composed
of a feature extractor and a detection head. When
trained on ImageNet, the feature extractor is powerful
for a wide range of tasks and enables transfer learning
to different domains (Razavian et al., 2014). On the
contrary, the detection head is specific to the applica-
tion and dataset at hand. Several training strategies
result from this decomposition: training the feature
extractor and the detection head jointly, training them
with different data or parameters, training only the de-
tection head or specific layers.
According to (Chu et al., 2016), an optimal learn-
ing strategy with few images from the target domain is
to use as many pre-trained layers as possible and fine-
tune the whole network with the target data. With
only synthetic data available, (Hinterstoisser et al.,
2018) achieved the better performance keeping the
feature extractor pre-trained on ImageNet and train-
ing only the detector head. On the contrary, the au-
thors from (Tremblay et al., 2018) obtained better re-
sults fine-tuning the whole CNN with synthetic im-
ages. To identify the best strategy in our case, we an-
alyze the following experiments: training the full net-
work or only the detection head, using only synthetic
data, only real data or a combination of both. Finally,
to replicate common perturbations in egocentric im-
ages, we evaluate the influence on the performance of
including blur and shadows in the training set.
4 EXPERIMENTS
In this section, we present first the real dataset ac-
quired and the synthetic dataset built following the
framework in Section 3.1. Second, we detail the train-
ing strategies applied. Finally, we introduce the eval-
uation metrics. We use in our experiments a bus seat,
for which 5 CAD models and the real non-assembled
objects are available. With the real objects, we ac-
quired images to evaluate the performance of our ap-
proach. Notice that the framework can be easily ap-
plied on any dataset with CAD models available.
4.1 Real Dataset
We acquired images of the real objects to evaluate
the detection task. We also used them to train a
CNN and compare the performance. The acquired
images are photos and videos shot from three dif-
ferent smartphones (Figure 3), and even more, and
egocentric videos shot from one of the smartphones
mounted into an augmented reality headset. This
Figure 3: (Top) Pictures acquired with a smartphone. (Bot-
tom) A. Full bus seat model (1), backrest (2), handle (3),
seat (4), left profile (5), right profile (6). B. Bad model.
headset allows the user to manipulate the objects with
both hands. Therefore, the videos show characteris-
tics similar to an industrial application with an AR
head-mounted device: objects fall partially outside
the image when held at arm’s length, many frames are
blurred, and lots of shadows and reflections appear.
These elements make detection challenging, as they
modify the visual appearance of the objects, espe-
cially in video recordings (Figure 1). From the videos,
we manually extracted a portion of their frames to re-
duce annotation time, selecting a large variety of ob-
ject positions, illumination and blurring conditions.
However, it is worth noting that these images do
not show an exhaustive set of poses, and their back-
grounds are very similar.
A total of 392 annotated images is used to form
the real dataset, with one or several objects per im-
age. All classes appear within the same proportions
(about 20%), except for the backrest (about 30%) and
the seat (about 10%). Most images contain several
objects occluding each other or truncated. Some ob-
jects are very similar (backrest and seat, left and right
profiles) and hardly distinguishable in some images,
e.g., when only a part of the object is visible, making
our target domain very challenging.
4.2 Synthetic Dataset
The bus seat has 5 main parts: handle, backrest, left
profile, right profile, and seat (Figure 3-A). First, we
process the CAD models with poor quality (Figure 3-
B). Using the framework of Section 3.1, we generate
2D views with 162 camera viewpoints and 5 colors
per viewpoint, leading to 810 images per class. Ex-
perimentally, we selected 162 camera poses because
many objects were missed in our first experiments
with only 42 viewpoints. On the contrary, more cam-
era poses lead to similar and redundant views. Each
view appears with 15 in-plane rotations as most CNNs
are not rotation-invariant. For the experiments pre-
sented here, we focused on images with only one ob-
ject, leaving the simulation of occlusions for future
work. To compose the synthetic dataset, we randomly
CAD-based Learning for Egocentric Object Detection in Industrial Context
647

selected 2000 images per class, leading to 10 000 syn-
thetic images with balanced classes. For some exper-
iments, this dataset is modified with blur or shadows
on half of the images.
4.3 Model Training and Evaluation
We use as object detector a Darknet implementation
of YOLOv3 (Redmon et al., 2019). YOLOv3 is ca-
pable of real-time inference, which makes it adequate
for mobile object detection as in an AR headset. The
feature extractor network is Darknet-53, and we use it
in all experiments its weights pre-trained on the Im-
ageNet dataset of the 1000-class classification task.
The detection head is always randomly initialized.
Training is performed with the default parameters:
stochastic gradient descent with mini-batches of 64
images, momentum of 0.9, weight decay of 0.0005,
initial learning rate of 0.001 (divided by 10 when the
validation performance stops improving). Data aug-
mentation (saturation, hue and exposure variations) is
used for real and synthetic training images, as well as
in-plane rotation for real images only (since already
included in the synthetic dataset).
As a baseline, we train the full network end-to-
end with real images (Net Real), and only the de-
tector head with real images (Det Real). We re-
peat these experiments with synthetic images with-
out any blur or shadows (Net Synth, Det Synth). To
evaluate the importance of egocentric cues, we train
the detector head only with shadows (Det Shadows),
only with blur (Det Blur) and both (Det BS). Fi-
nally, we study the effect of using a small amount
of real data: added to the synthetic images during
training (Det SynthReal), or fine-tuning the detector
head in a final step (Net Synth+FT, Det Synth+FT,
Det Blur+FT).
All experiments are tested on real images. Net-
works trained on synthetic data are also tested on syn-
thetic images. All experiments follow a 3-fold cross-
validation scheme. For synthetic data, we subdivide
the 10000 images into 3 equal subsets: two are used
as training set (average of 6650 images), and the third
one is subdivided equally for validation and test (aver-
age of 1675 images each). We repeat each experiment
3 times with a different subset for validation and test,
and we report the average results. Real images from
videos were treated carefully: since frames within a
video have similar illumination, background and ob-
ject poses, they cannot be distributed among training,
validation and test set. As the videos do not show
all 5 objects, we carefully distribute the videos into
the training, validation and test set, to make sure that
each object appears in every set of the 3 splits. Then,
we balance the number of objects and images in each
set by distributing the remaining pictures. In average,
293 objects appear in the training set for 131 images,
322 objects in the validation set for 125 images, and
302 objects in the test set for 136 images.
4.4 Evaluation Metrics
As an object detector, YOLOv3 outputs for each im-
age a series of bounding box coordinates and their
corresponding class labels, along with a confidence
level. At test time, detections with confidence higher
than 0.25 are kept. However, the performance is eval-
uated for all detections with the mean Average Preci-
sion (mAP) and Intersection over Union (IoU), as they
are defined for the Pascal VOC challenge (Evering-
ham et al., 2010). The mAP metric index is the mean
Average Precision (AP) over all classes. For each
class, AP is the area under the interpolated precision-
recall curve, computed as the mean precision corre-
sponding to 11 equally spaced recall values. The IoU
measures the overlap of the predicted and ground-
truth bounding box of an object. A detection is posi-
tive if its bounding box overlaps with the ground-truth
by 50% or more (denoted IoU@50). We also report
the standard deviation on the 3 cross-validation exper-
iments, to illustrate the variation in performance with
different training sets.
5 RESULTS AND DISCUSSION
In this section, we present the results obtained with
the different learning strategies in Section 4.3. We
also analyze the effect on learning of different types of
blur in the synthetic training set. Finally, we propose
a qualitative analysis of the results.
5.1 Baselines
Table 1 shows the results of the baseline experiments
on synthetic images. When YOLOv3 is trained end-
to-end on synthetic images without blur and shadows
(Net Synth), the mAP is 88.6% and the IoU is 76.9%.
When the feature extractor is fixed after being pre-
trained on ImageNet (Det Synth), the mAP decreases
to 63.4% and the IoU drops to 49.5%. These results
suggest that the features learned on real images do not
correspond to features in synthetic images, which is
consistent with the domain gap. From all the classes,
the only exception is the handle, which is detected
almost as well in both cases.
Table 2 shows the results of the same experiments
on real images. As expected, the metrics drop for both
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
648
Table 1: Detailed results for training and test on synthetic images: AP per class, mAP, IoU (%).
Handle Backrest Left profile Right profile Seat mAP IoU@50
Net Synth 90.8 86.7 90 88.8 86.8 88.6 ± 0.3 76.9 ±1
Det Synth 86.5 48.6 69.5 58.3 53.4 63.4 ± 5 49.5± 2.4
Table 2: Detailed results of baseline experiments on real images: AP per class, mAP, IoU (%).
Handle Backrest Left profile Right profile Seat mAP IoU@50
Net Synth 12.1 30 12.8 1.1 39.1 19 ± 8.4 32.1 ± 9
Det Synth 37.3 54.7 18.4 18.3 45.4 34.8 ± 4.8 41.6 ± 3.8
Net Real 51.7 70.3 18.8 25.5 63.8 46 ± 12 44.4 ± 10.8
Det Real 48.3 65.4 15.7 21.2 55.1 41.1 ± 3.8 42.7 ± 13.7
Net Synth and Det Synth, although Det Synth per-
forms much better: the network takes advantage of
the real features learned on ImageNet, even if it has
not seen any real image of the objects. Regarding the
networks trained on real images only, Net Real and
Det Real, objects are not detected very accurately,
with a mAP of 46% and 41.1% respectively. We
observe here the limitations of training with a small
number of real images, and we explore in the next sec-
tions possible directions to improve the performance.
5.2 Using Blur and Shadows
As we observed better results training only the de-
tector head with synthetic images, we carried out the
next experiments with this strategy. Table 3 shows
the results on real images when the synthetic train-
ing set presents: no blur and shadows (Det Synth),
shadows only (Det Shadows), blur only (Det Blur),
both blur and shadows (Det BS) (resulting in a big-
ger training set). While artificial shadows do not im-
prove the accuracy (mAP is the same for Det Synth
and Det Shadows), the IoU increases from 41.6% to
46.1%. We can deduce that shadows make the local-
ization of objects more difficult in real images.With
Det Blur, the mAP and IoU both increased compared
to Det Synth. This experiment shows a better detec-
tion in slightly blurry images where nothing was de-
tected previously, and a more precise localization. Fi-
nally, with Det
BS, the IoU is decreased compared to
Det Blur (although it is still higher than Det Synth),
while the mAP increases to 45.8%. Without any real
image during training, the best strategy for our dataset
seems to be the training of the detector head only with
blur and shadows for a better mAP, or only blur for a
better IoU.
Table 3: Influence of blur and shadows on real images (%).
mAP (%) IoU@50 (%)
Det Synth 34.8 ± 4.8 41.6± 3.8
Det Shadows 34.8± 3.3 46.1 ± 6.5
Det Blur 44 ± 1.4 51.3 ± 5
Det BS 45.8 ± 1.5 46.5 ± 3.7
5.3 Fine-tuning with Real Images
We fine-tune the detection head of YOLOv3 with the
real images used in the baseline experiments Net Real
and Det Real. As Table 4 shows, this fine-tuning step
increases the performance, except for the IoU when
training with blurred images. For all experiments but
Net Synth, using both synthetic and real images dur-
ing training gives better performance than using real
images only. When training with real and synthetic
images at the same time (Det SynthReal), we obtain
better mAP than without any real image, but low IoU.
In conclusion, the detection is improved combining
real and synthetic images, but the localization can be
better without any real image.
Table 4: Influence of using real images during training (%).
mAP IoU@50
Net Synth 19 ± 3.8 32.1 ± 13.7
Det Synth 34.8 ± 4.8 41.6 ± 3.8
Det Blur 44± 1.4 51.3 ± 5
Net Synth+FT 40.7 ± 13.6 44.71 ± 7.6
Det Synth+FT 49.3 ± 10.6 42.7 ± 2.9
Det Blur+FT 52.4 ± 10.3 48.5 ± 7.7
Det SynthReal 48.5± 6.2 41.8 ± 5.3
5.4 Blur Analysis
We studied the influence of the type of blur used in
the training set. In Figure 4, we show the mAP and
IoU@50 of the network trained without any blurred
image (Det Synth), only motion blur, only Gaussian
blur, and both motion and Gaussian blur equally dis-
tributed (Det Blur). We observe that any blur im-
proves the performance, although Gaussian blur is
slightly better. Finally, the best performance is ob-
tained with both types of blur, with 44% of mAP and
51.3% of IoU. This result shows again that more char-
acteristics of real images and variability are key com-
ponents towards generalization to the real domain.
CAD-based Learning for Egocentric Object Detection in Industrial Context
649

IoU@50
mAP
30
40
50
41.6
34.8
39.2
42.5
41.2
44.9
44
51.3
Performance (%)
Det Synth Motion blur
Gaussian blur Det Blur
Figure 4: Comparison of the type of blur during training.
Figure 5: Detections of Net Real, Det Blur and
Det Blur+FT.
5.5 Qualitative Analysis
In this section, we provide examples of correct and
missed detections for a deeper understanding of the
results. As we do not simulate occlusions and multi-
object detections, the CNN is not able to detect many
close or overlapping objects (Figure 5, bottom), and
outputs a small number of bounding boxes.
Training on real images allows to detect all parts
when the bus seat is assembled, as similar composi-
tion exists in the training set (Figure 5, bottom); the
number of detections per image is much higher, in-
cluding more false positive detections (Figure 5, top).
Using synthetic training and real fine-tuning removes
the false positive while detecting all objects. Another
type of error comes from the similarity between the
objects: the left and right handle look very similar,
especially when they do not appear entirely in the im-
age ; the seat and backrest are almost identical ob-
jects except for their length. Indeed, when manually
labelling the real images, we considered the several
consecutive frame, because it is sometimes not pos-
sible to distinguish some objects considering a single
frame, without extra information. It is then under-
standable that the CNN is not able to recognize them
either. Finally, when the training is carried out only on
synthetic images, the CNN detects objects even when
they are slightly truncated by the image borders (Fig-
ure 6), because images of this scenario are generated
by our framework.
Figure 6: Truncated objects correctly detected (Det Blur).
6 CONCLUSION AND FUTURE
WORK
We proposed a framework for the generation of ego-
centric synthetic images given a set of CAD mod-
els. We showed that pre-training the feature extrac-
tor on ImageNet and training the detector head with
synthetic images, enriched with blur and shadows,
enables to reach a similar classification accuracy as
using only real images, and even better localization.
Fine-tuning the resulting network with a small set of
real images further improves the detection, at the cost
of localization precision.
To pursue our effort towards a better detection
in real images, occlusions and multiple objects re-
main to be incorporated. Small objects as screws and
bolts could also be added to the objects to detect.
Finally, discriminating similar objects is a challenge
that needs further investigations.
ACKNOWLEDGEMENT
This work is supported by grant CIFRE n.2018/0872
from ANRT. We also thank DEMS for providing the
3D data and real objects.
REFERENCES
Agin, G. J. (1980). Computer vision systems for industrial
inspection and assembly. Computer, (5):11–20.
B
¨
ohm, J., Brenner, C., G
¨
uhring, J., and Fritsch, D. (2000).
Automated extraction of features from cad models for
3d object recognition. In ISPRS Congress.
Chu, B., Madhavan, V., Beijbom, O., Hoffman, J., and Dar-
rell, T. (2016). Best practices for fine-tuning visual
classifiers to new domains. In ECCV, pages 435–442.
Damen, D., Doughty, H., Farinella, G. M., Fidler, S.,
Furnari, A., Kazakos, E., Moltisanti, D., Munro, J.,
Perrett, T., Price, W., and Wray, M. (2018). Scal-
ing egocentric vision: The epic-kitchens dataset. In
ECCV, pages 720–736.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In CVPR, pages 248–255.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
650

Evans, G., Miller, J., Pena, M. I., MacAllister, A., and
Winer, E. (2017). Evaluating the microsoft hololens
through an augmented reality assembly application.
In Degraded Environments: Sensing, Processing, and
Display, volume 10197.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. IJCV, 88(2):303–338.
Gavish, N., Guti
´
errez, T., Webel, S., Rodr
´
ıguez, J., Peveri,
M., Bockholt, U., and Tecchia, F. (2015). Evaluating
virtual reality and augmented reality training for in-
dustrial maintenance and assembly tasks. Interactive
Learning Environments, 23(6):778–798.
Hinterstoisser, S., Benhimane, S., Lepetit, V., Fua, P., and
Navab, N. (2008). Simultaneous recognition and ho-
mography extraction of local patches with a simple
linear classifier. In BMVC.
Hinterstoisser, S., Lepetit, V., Wohlhart, P., and Konolige,
K. (2018). On pre-trained image features and syn-
thetic images for deep learning. In ECCV Workshops.
Inoue, T., Choudhury, S., De Magistris, G., and Dasgupta,
S. (2018). Transfer learning from synthetic to real im-
ages using variational autoencoders for precise posi-
tion detection. In IEEE ICIP, pages 2725–2729.
Kehl, W., Manhardt, F., Tombari, F., Ilic, S., and Navab, N.
(2017). Ssd-6d: Making rgb-based 3d detection and
6d pose estimation great again. In ICCV, pages 1521–
1529.
Klein, G. and Murray, D. (2007). Parallel tracking and map-
ping for small AR workspaces. In IEEE/ACM Inter-
national Symposium on Mixed and Augmented Reality
(ISMAR).
Klein, G. and Murray, D. (2009). Simulating low-cost
cameras for augmented reality compositing. IEEE
Transactions on Visualization and Computer Graph-
ics, 16(3):369–380.
Langlois, J., Mouch
`
ere, H., Normand, N., and Viard-
Gaudin, C. (2018). 3d orientation estimation of in-
dustrial parts from 2d images using neural networks.
In ICPRAM, pages 409–416.
Malamas, E. N., Petrakis, E. G. M., Zervakis, M., Petit,
L., and Legat, J.-D. (2003). A survey on industrial vi-
sion systems, applications and tools. Image and Vision
Computing, 21(2):171–188.
Massa, F., Russell, B. C., and Aubry, M. (2016). Deep ex-
emplar 2d-3d detection by adapting from real to ren-
dered views. In CVPR, pages 6024–6033.
Maturana, D. and Scherer, S. (2015). Voxnet: A 3d convolu-
tional neural network for real-time object recognition.
In IROS, pages 922–928.
Nguyen, T.-H.-C., Nebel, J.-C., and Florez-Revuelta, F.
(2016). Recognition of activities of daily living with
egocentric vision: A review. Sensors, 16(1):72.
Peng, X., Sun, B., Ali, K., and Saenko, K. (2015). Learning
deep object detectors from 3d models. In ICCV, pages
1278–1286.
Planche, B., Zakharov, S., Wu, Z., Kosch, H., and Ilic, S.
(2019). Seeing beyond appearance - mapping real im-
ages into geometrical domains for unsupervised cad-
based recognition. In IROS.
Qin, F.-w., Li, L.-y., Gao, S.-m., Yang, X.-l., and Chen, X.
(2014). A deep learning approach to the classifica-
tion of 3d cad models. Journal of Zhejiang University
SCIENCE C, 15(2):91–106.
Razavian, A. S., Azizpour, H., Sullivan, J., and Carlsson,
S. (2014). Cnn features off-the-shelf: an astounding
baseline for recognition. In CVPR Workshops, pages
806–813.
Redmon, J., Bochkovskiy, A., and Sinigardi, S. (2019).
Darknet: Yolov3 - neural network for object detection.
https://github.com/AlexeyAB/darknet.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Rozantsev, A., Lepetit, V., and Fua, P. (2015). On rendering
synthetic images for training an object detector. Com-
puter Vision and Image Understanding, 137:24–37.
Sarkar, K., Varanasi, K., Stricker, D., Sarkar, K., Varanasi,
K., and Stricker, D. (2017). Trained 3d models for cnn
based object recognition. In VISAPP, pages 130–137.
Su, H., Qi, C. R., Li, Y., and Guibas, L. J. (2015). Render
for cnn: Viewpoint estimation in images using cnns
trained with rendered 3d model views. In ICCV, pages
2686–2694.
Sundermeyer, M., Marton, Z.-C., Durner, M., Brucker, M.,
and Triebel, R. (2018). Implicit 3d orientation learn-
ing for 6d object detection from rgb images. In ECCV,
pages 699–715.
Toshev, A., Makadia, A., and Daniilidis, K. (2009). Shape-
based object recognition in videos using 3d synthetic
object models. In CVPR, pages 288–295.
Tremblay, J., Prakash, A., Acuna, D., Brophy, M., Jampani,
V., Anil, C., To, T., Cameracci, E., Boochoon, S., and
Birchfield, S. (2018). Training deep networks with
synthetic data: Bridging the reality gap by domain
randomization. In CVPR Workshops, pages 969–977.
Ulrich, M., Steger, C., Baumgartner, A., and Ebner, H.
(2001). Real-time object recognition in digital images
for industrial applications. In 5th Conference on Op-
tical 3-D Measurement Techniques, pages 308–318.
Van Krevelen, D. W. F. and Poelman, R. A survey of aug-
mented reality technologies, applications and limita-
tions. International Journal of Virtual Reality, 9(2).
Wang, P.-S., Sun, C.-Y., Liu, Y., and Tong, X. (2019). Adap-
tive o-cnn: A patch-based deep representation of 3d
shapes. ACM Transactions on Graphics, 37(6):217.
Wohlhart, P. and Lepetit, V. (2015). Learning descriptors for
object recognition and 3d pose estimation. In CVPR,
pages 3109–3118.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d shapenets: A deep representa-
tion for volumetric shapes. In 2015 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1912–1920.
Xiang, Y., Mottaghi, R., and Savarese, S. (2014). Beyond
pascal: A benchmark for 3d object detection in the
wild. In IEEE Winter Conference on Applications of
Computer Vision, pages 75–82.
CAD-based Learning for Egocentric Object Detection in Industrial Context
651
