
Multi-stream Deep Networks for Vehicle Make and Model Recognition
Mohamed Dhia Elhak Besbes
1
, Yousri Kessentini
2
and Hedi Tabia
1
1
IBISC, Univ. Evry, Universit
´
e Paris-Saclay, 91025, Evry, France
2
Digital Research Center of Sfax, Sfax, Tunisia
Keywords:
Fine-grained Vehicle Recognition, Convolutional Neural Network, Multi-stream Fusion.
Abstract:
Vehicle recognition generally aims to classify vehicles based on make, model and year of manufacture. It
is a particularly hard problem due to the large number of classes and small inter-class variations. To handle
this problem recent state of the art methods use Convolutional Neural Network (CNN). These methods have
however several limitations since they extract unstructured vehicle features used for the recognition task. In
this paper, we propose more structured feature extraction method by leveraging robust multi-stream deep
networks architecture. We employ a novel dynamic combination technique to aggregate different vehicle part
features with the entire image. This allows combining global representation with local features. Our system
which has been evaluated on publicly available datasets is able to learn highly discriminant representation and
achieves state-of-the-art result.
1 INTRODUCTION
Vehicle Make and Model Recognition (VMMR) is
both coarse and fine-grained classification problem.
On one hand, vehicles can have unconstrained poses
when taken under multiple view points. Classification
under such condition can be seen as coarse grained
problem. On the other hand, the unique hierarchical
structure starting from mark, model to year of man-
ufacture makes vehicle categories very similar with a
subtle inter-class variation.
In the literature, only few papers have addressed
the above-mentioned problems. Most of the ear-
lier vehicle identification research focuses on license
plate recognition (Li et al., 2017; Cheang et al., 2017;
Li and Shen, 2016; Masood et al., 2017; Du et al.,
2013; Gou et al., 2016; Hsu et al., 2013) and vehicle
make recognition (Gao and Lee, 2015; Khan et al.,
2010; Wei Wu et al., 2001; Lai et al., 2001; Xiaoxu
Ma and Grimson, 2005; Yishu Peng et al., 2014; Psyl-
los et al., 2010).
Early works on vehicle model recognition focused
on low level features representation: (Psyllos et al.,
2009) uses Scale Invariant Feature Transform (SIFT
(Lowe, 2004; Lowe, 1999; Lowe, 2001)) to describe
make-model instances. This method is computation-
ally expensive. To overcome this issue Speeded Up
Robust Features (SURF (Bay et al., 2008)) and His-
togram Oriented Gradients (HOG) have been used
by (Hsieh et al., 2014a) for more robustness and
speed. The SURF method which uses the Hessian
matrix approximation to detect key points gives more
robust results while being faster than the SIFT based
methods (Psyllos et al., 2009). Several variations of
SURF descriptor have also been used. These varia-
tions include (1) Features from Accelerated Segment
Test(FAST) which is a key-points detection method
designed for real-time applications, (2) Binary Ro-
bust Independent Elementary Features (BRIEF) and
(3) Oriented FAST which uses FAST detector for key-
points detection and BRIEF as descriptor.
The majority of these methods only rely on low
level features without any structured information.
This makes them very sensitive to different types of
noise, especially occlusions and the presence of sev-
eral vehicles in a single image.
Unlike the conventional feature extraction algo-
rithms (e.g. SIFT, HOG), Convolutional Neural Net-
works (CNN) uses several hidden layers to hierar-
chically learn high level representation of the image.
Convolving filters (or kernels) on the image allows the
network to extract more relevant features. Activation
functions and pooling layers allow the network to be
more robust to scaling, translation and rotation vari-
ations. Moreover, high level feature representations
are less sensitive to noise. Due to this fact CNNs be-
came very popular tools extensively used by the com-
puter vision community (Sam et al., 2017; Luvizon
et al., 2018; Paumard et al., 2018). In particularly
in vehicle model and make recognition, CNN based
Besbes, M., Kessentini, Y. and Tabia, H.
Multi-stream Deep Networks for Vehicle Make and Model Recognition.
DOI: 10.5220/0008975404130419
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
413-419
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
413
approaches are achieving impressive results. Works
such as proposed in (He et al., 2015) recognize vehi-
cle make and model from surveillance camera by first,
detecting frontal view components such as the grilles,
the plate or the lights. Then, specialized CNNs clas-
sify each part of the vehicle, before a global car clas-
sification. While this method achieves high perfor-
mance, it is limited to frontal view points only.
Another part-based vehicle recognition method
proposed by (Biglari et al., 2018) attends to find rel-
evant parts for each vehicle class. The method uses
one classifier per class and a cascade of classifiers are
applied to the input image.
(Hsieh et al., 2014b) uses SIFT-like local descrip-
tors to train weak classifiers over a grid of vehicle
parts. (Hu et al., 2017) propose Spacial Weighted
Pooling (SWP) instead of the standard pooling in the
CNN. SWP layer feds the fully connected layer with
robust feature representation by magnifying features
corresponding to the discriminant parts of the image.
However, it has been shown that the performance of
the SWP layers decreases with large variations in the
scale and the position of the vehicle. (Ghassemi et al.,
2018) propose a deep convolutional architecture built
upon multi-scale attention windows. Through those
windows the most discriminative parts of the vehi-
cle are aggregated over different scales. The model
uses Residual Networks (He et al., 2015) with Spatial
transformer networks(STN) (Jaderberg et al., 2015)
to improve resilience to affine transformations. How-
ever, in an STN with multiple feed-forward alignment
modules, the output image of the previous alignment
module is directly fed into the next. This is problem-
atic as it can create unwanted boundary effects as the
number of geometric prediction layers increase.
In this work, we propose a robust dynamic multi-
stream model that is able to extract vehicle feature
parts, as well as vehicle global features from the entire
image. This allows to jointly detect fine grained fea-
tures related to each part and the global vehicle rep-
resentation. We introduce a new network architecture
which combines the local and the global representa-
tions. This architecture enables dynamic input fea-
tures to fed into a fully connected layer. Our experi-
ments conducted on a publicly available dataset show
the superiority of our method compared to state-of-
the-art ones.
2 THE PROPOSED APPROACH
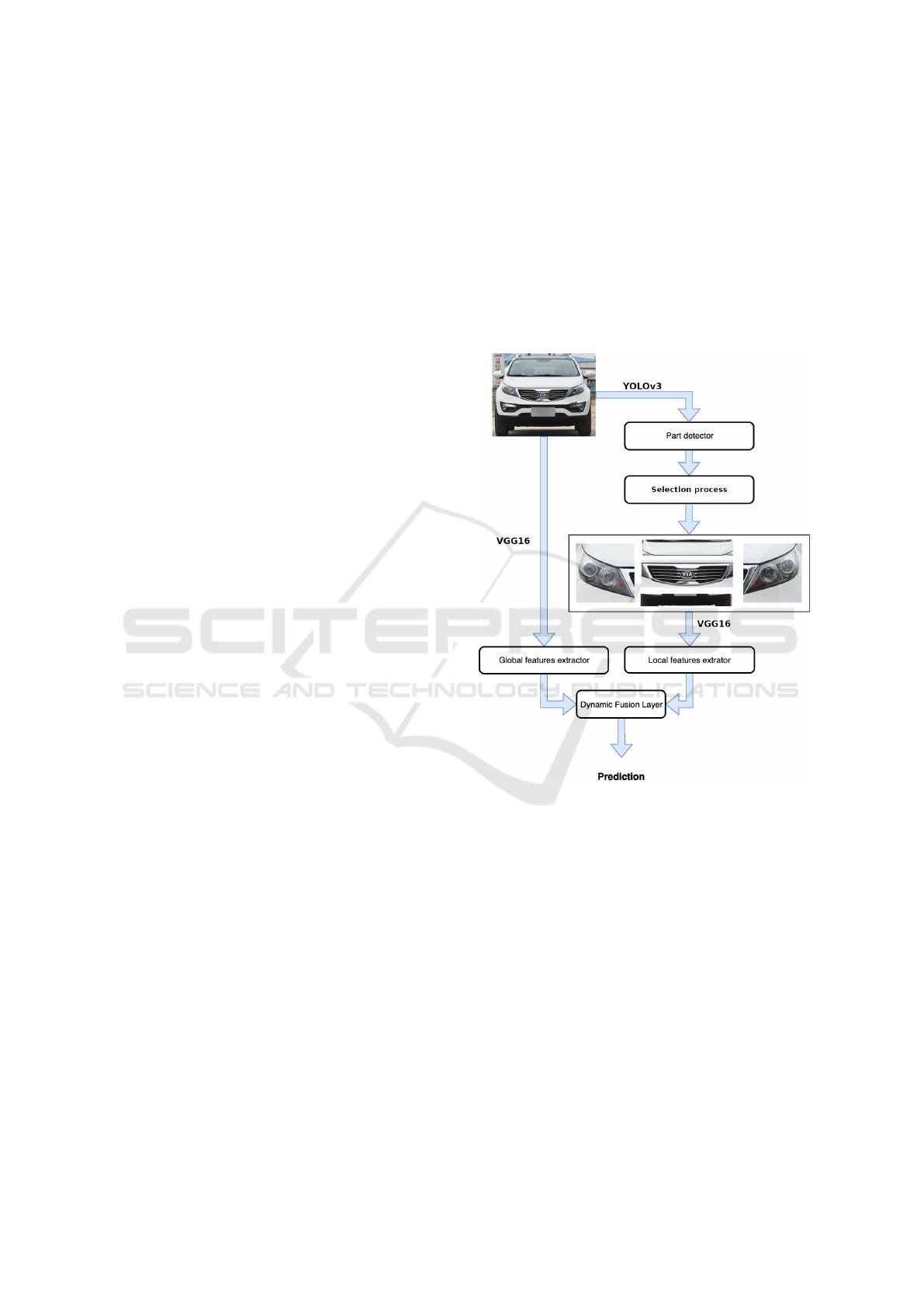
We propose a multi-stream robust architecture to ex-
tract and combine both local and global features rep-
resentations for VMMR. First, given a vehicle image,
a pre-trained CNN detector finds vehicle parts. The
number of detected parts may vary from one image to
another. Moreover, a selection process is applied to
only keep relevant parts from all detected ones (see
Section 2.2). Then, each part goes, through the multi-
stream architecture, into a specialized feature extrac-
tor which allows the system to detect subtle inter-class
variations. Finally, all extracted features are aggre-
gated using a novel fusion technique described in Sec-
tion 2.4. An overview of the main steps of our system
are depicted in Figure 1.
Figure 1: System’s main steps. The image is first processed
by YOLO to detect the vehicle parts. Global and local fea-
tures are then extracted from the full vehicle image and the
selected parts using VGG. The global and the local repre-
sentations are then fed to the dynamic fusion layer to per-
form the final classification.
2.1 Vehicle Part Detection
Our approach starts by extracting a set of parts
{P
1
, P
2
, . . . , P
n
} from a given image I. Since vehicle
pose may vary across images, we do not assume that
all parts appear in I. Conventional detection meth-
ods learn classifiers to perform detection. Classifier
rules are generally evaluated on a sliding window and
a binary output is computed in the corresponding lo-
cation. More recent deep learning based architectures
get around the sliding window techniques and pro-
duced higher performance while being faster.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
414
Following this advance, we choose to use
YOLO (Redmon and Farhadi, 2018) to detect each
vehicle part. Thanks to the encoded context informa-
tion, YOLO detector provides robust results in all our
experiments.
2.2 Selection Process
Usually different combinations of vehicle parts leads
to different performance. We show in the experimen-
tal section that the front bumper, for instant, combined
with the entire image yields better results than com-
bining the front bumper, front left light, front right
light and the entire image (see Table 4). To allevi-
ate this problem, we introduce a selector which filters
out the best performing set of parts from all possible
combinations.
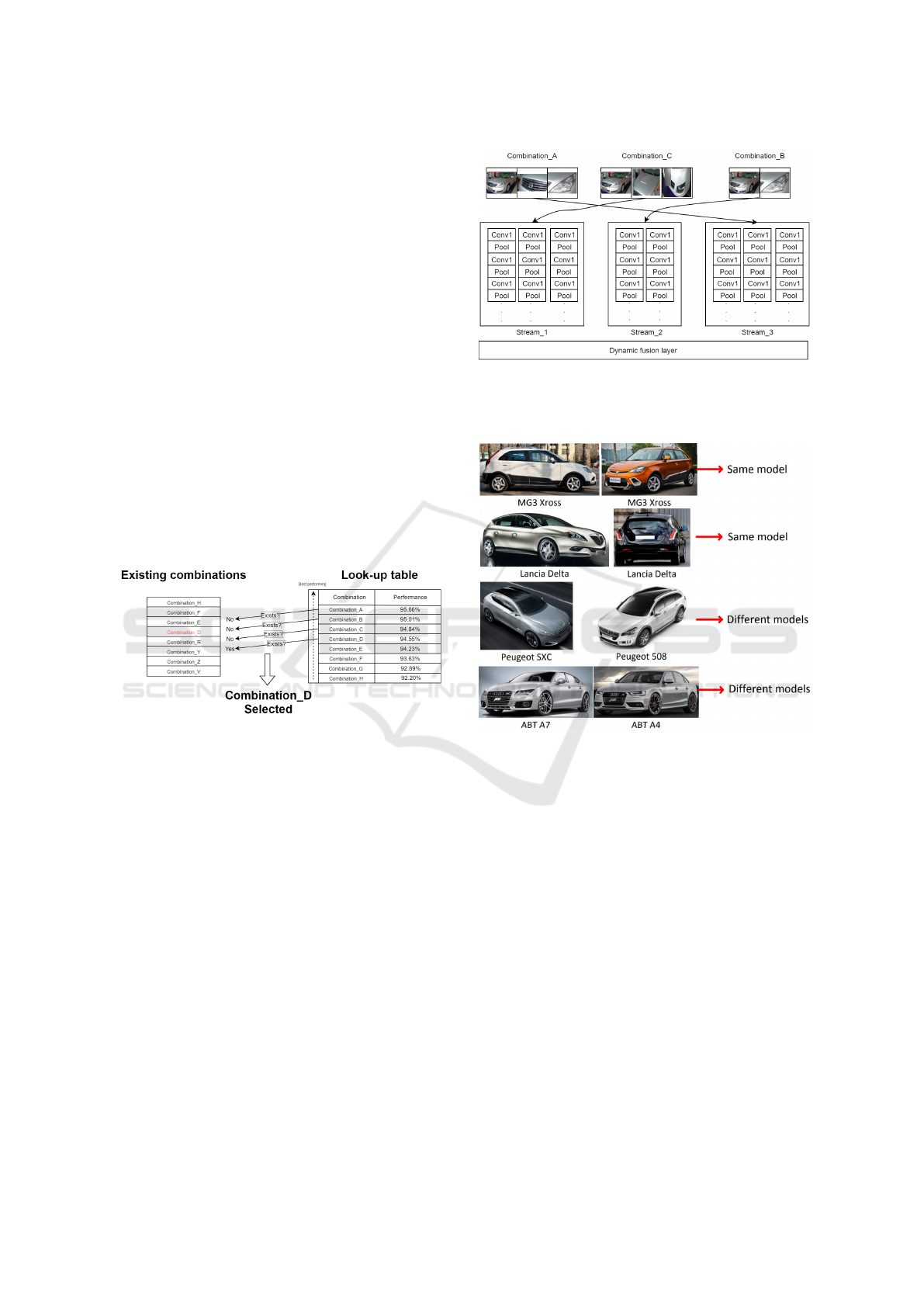
The selection process is based on a look-up table
memorising the combination rates from the best to the
worst performance, computed on the validation set.
To select a combination the algorithm iterates on
the look-up table until it finds an existing combina-
tion. Figure 2 presents the selection process.
Figure 2: The selection algorithm iterates over the look-up
table testing if the current part combination exists. Once a
relevant combination is found, the algorithm filters out the
chosen parts for the feature extraction module.
2.3 Multi-stream Architecture
Vehicle manufactures copy traits from previous mod-
els to produce new ones. This increases the com-
plexity of the VMMR task, since the model recog-
nition relies on the subtle variations between vehicle
parts. Figure 4 shows the subtle differences between
models. To detect these subtle variations, we employ
a multi-stream architecture to apply specialized fea-
tures extractors for every part and every combination
of parts. Figure 4 also shows same models with differ-
ent variations. In this case a global representation may
benefits the recognition task rather than the part in-
formation. Our multi-stream architecture successfully
combines both a global and local representations. It
also provides a flexible system that can use any avail-
able stream which feds the input. Figure 3 shows the
used multi-stream architecture.
Figure 3: Multi-stream architecture used with different
combinations. The figure shows different streams and how
the selection process finds a combination which is then fed
to the relevant stream.
Figure 4: Examples of subtle differences between vehicle
models. From a global perspective the vehicles seem simi-
lar, yet they belong to different vehicle models. This is due
to very subtle variations.
We set streams as different combination of de-
tected parts. Our selection process (section 2.2) en-
sure that the best performing stream, according to the
validation set, is used. The number of combinations is
empirically fixed bounded by the available memory.
2.4 Dynamic Fusion Layer
The multi-stream architecture provides important ad-
vantages such as robustness and specialized fea-
ture extractors, However, the resulted features will
have different shapes depending on the used streams.
Moreover, a single static classification layer may not
be sufficient for representing all of the variations of
the multi-stream architecture. As a solution we in-
troduce a dynamic fusion layer which only considers
relevant weights that fit the input and swap the others
Multi-stream Deep Networks for Vehicle Make and Model Recognition
415
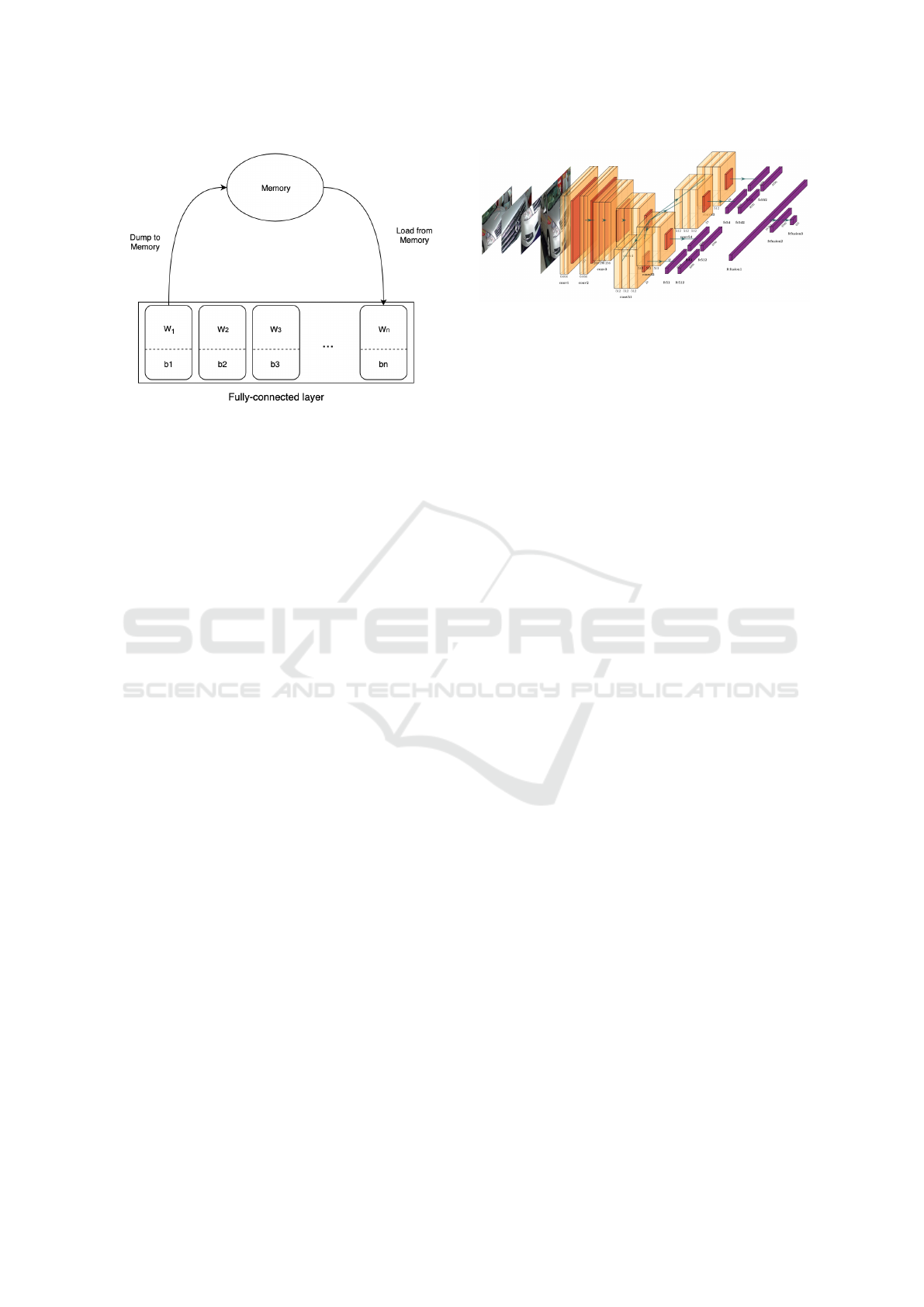
Figure 5: Dynamic fully-connected layer. Depending on
the input, weights w and biases b are dynamically swapped.
Relevant w and b are loaded from the memory while irrele-
vant w and b are dumped to memory. A final weight matrix
W is the result of concatenating all the weights loaded from
memory.
at the run-time. The swapping process is depicted in
Figure 5.
Each part has a weight matrix W of shape 4096 ×
431, 431 is the number of classes, and a bias vector b
of shape 431. The system stores in memory all of the
weights and biases then, at run-time, depending on
available parts the system dumps unrelated weights
and biases to the memory and load only the weights
and biases of present parts.
This technique allows the fully-connected layer to
have variable input shapes and to store part-specific
features.
3 MODEL ARCHITECTURE
The model architecture for each stream is composed
of three main sections. (1) The shared section: con-
volutional blocks that are common to all parts and the
entire image. (2) specialized feature extractors: con-
volutional blocks and fully-connected layers special-
ized for each of the vehicle parts and the entire im-
age.(3) The dynamic fusing layer for features aggre-
gation and classification. Figure 6 shows the model
architecture of a single stream. The Cross-entropy
loss, or log loss
∑
M
c=1
y
o
c
× log(p
o
, c) were M is the
number of classes , y is a binary indicator (0 or 1) if
class label c is the correct classification for observa-
tion o and p is the predicted probability observation o
is of class c. Log loss is used for all of the training ses-
sions. The loss is back-propagated til the fifth convo-
lutional layer leaving the first four layers unchanged.
Figure 6: Model architecture. Initially, parts are intro-
duced to the model sequentially from a single input. The
batch B is composed of n mini-batches {b
1
, b
2
, . . . , b
n
},n
being the number of parts, each mini-batch contains sim-
ilar parts {p
1
, p
2
, . . . , p
k
} for k ≤ n so the batch size is
k × n. The images are passed through the first four con-
volutional block then the batch B is split into n groups
{{p
1
1
, p
1
2
, . . . , p
1
n
}, {p
2
1
, p
2
2
, . . . , p
2
n
}, . . . , {p
k
1
, p
k
2
, . . . ,
p
k
n
}} each image in the group is passed to a part-specific
fifth convolutional block. Finally, the image and it parts
features are aggregated with the dynamic fully-connected
layer.
3.1 Shared Section
The Shared section is the set of convolutional blocs
that extracts basic features: lines, edge,... the weights
are uploaded from a pre-trained model on a large
dataset. The layers on this section are frozen, the
weights are not updated by back-propagation.
The shared section of the VGG16 based stream is
composed of three convolutional blocs pre-trained on
the ImageNet dataset.
3.2 Specialized Feature Extractors
This section contains layers with unfrozen weights
to learn local features(parts features) and global fea-
tures(entire image features).
For the VGG16 this section is composed of three
convolutional blocs and one fully-connected layer.
The same pooling functions are used as the original
VGG16 however, we added two batch normalisation
layer to speed-up the training process. The learning
rate is initialized at 0.001 with a decay factor of 0.1.
Although the system is end-to-end trainable we chose
to train every feature extractor separately to speed-
up the training process. First, the detector crops out
the parts from the images. Second, for every fea-
ture extractor, we use a batch of the 70 cropped parts
for training. Than the error is back-propagated using
stochastic gradient descent. Finally, we upload all the
feature extractors weights to the system to train the
dynamic fusion layer.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
416

3.3 Dynamic Fusion Layer
The dynamic fusion layer is the only section we
trained with an end to end fashion. The batch for
the entire system is a multiple of 5 depending on the
number of streams to be used. Every stream receives
a batch of 5 images so the dynamic fusion layer re-
ceives a batch of five images. The learning rate for
the dynamic layer is initialized at 0.001 with a decay
factor of 0.1. Only the dynamic layer weights are up-
dated using stochastic gradient descent.
4 EXPERIMENTAL RESULTS
4.1 CompCars Dataset
The Comprehensive Cars(CompCars) (L. Yang,
2015) is a publicly accessible dataset containing in
web-data a total of 136,727 images of the entire car
and 27,618 capturing the car parts. The database re-
spects the standard hierarchy with a total of 163 car
Marks and 1,716 car models covering most of the
commercial car models from 2005 to 2015. In terms
of view ports there are five: Front-view, Rear-view,
Side-view, Front-Side and Rear-Side. Table 1 shows
the total number of images per view-port and the av-
erage number of view-port images per model. The
Table 1: Quantity distribution in different view ports.
View-port No. in total No.per model
Front 18431 10.9
Rear 13513 8.0
Side 23551 14.0
Front Side 49301 29.2
Rear Side 31150 18.5
dataset is divided into two types (1) The Web dataset:
a collection of vehicle images taken from the web
from different view port.(2) The nature dataset: a
collection of vehicle images taken from surveillance
cameras. only the front view port is available. In this
work we test our model on the web dataset.
The web dataset contains most of the 1716 car models
however the CompCars article (L. Yang, 2015) pro-
poses a train/test split on 431 models. We adopt this
split to compare our work to state-of-the-arts results.
Figure 7 shows different examples of the web dataset.
4.2 Results from Individual Parts
Table 2 and 3 shows the results of the VGG16 with
Batch normalization on their respective cropped parts.
Figure 7: Web dataset.
The results show that some parts are more descriptive
than others. For example, in the front-view-Bumper,
the baseline VGG16 achieves 92.60% while the front-
right-light baseline VGG16 achieves 61.76%.
We can also see that parts that contains the mark logo
or model name like the Trunk and the Grilles achieves
best results.
Table 2: Individual front parts of CompCars’s web data.
Part VGG16 Train Test
Bumper 92.60% 7022 6740
Hood 92.26% 6988 6757
Grilles 93.83% 6622 6385
Left Light 64.72% 5875 5683
Right Light 61.76% 5942 5790
Table 3: Individual rear parts of CompCars’s web data.
Part VGG16 Train Test
Bumper 89.56% 5603 5312
Trunk 93.90% 5225 5221
Left Light 72.89% 5124 4859
Right Light 82.10% 5587 5300
4.3 Multi-stream Dynamic Fusion
In this section we compare different combinations of
parts. Table 4 shows the recognition rate of the best
performing combination per view-port. We divide
CompCars(L. Yang, 2015) dataset into three sections:
(1) Front View, (2) Rear View and (3) Side View. We
train and test different combinations on the three sec-
tions according to detected parts. The absence of a
part in a view-port is considered as falsely recognized.
We notice a drop in the performance on the side view-
port where no parts are used.
Some parts are more descriptive than others like
the Front Bumper for the front view and the Rear
Trunk for rear views. However, a combination of the
Front Bumper and the other parts decreases the accu-
racy to 91%.
We present in table 5 the obtained result of the
baseline recognition method applying the VGG on the
Multi-stream Deep Networks for Vehicle Make and Model Recognition
417
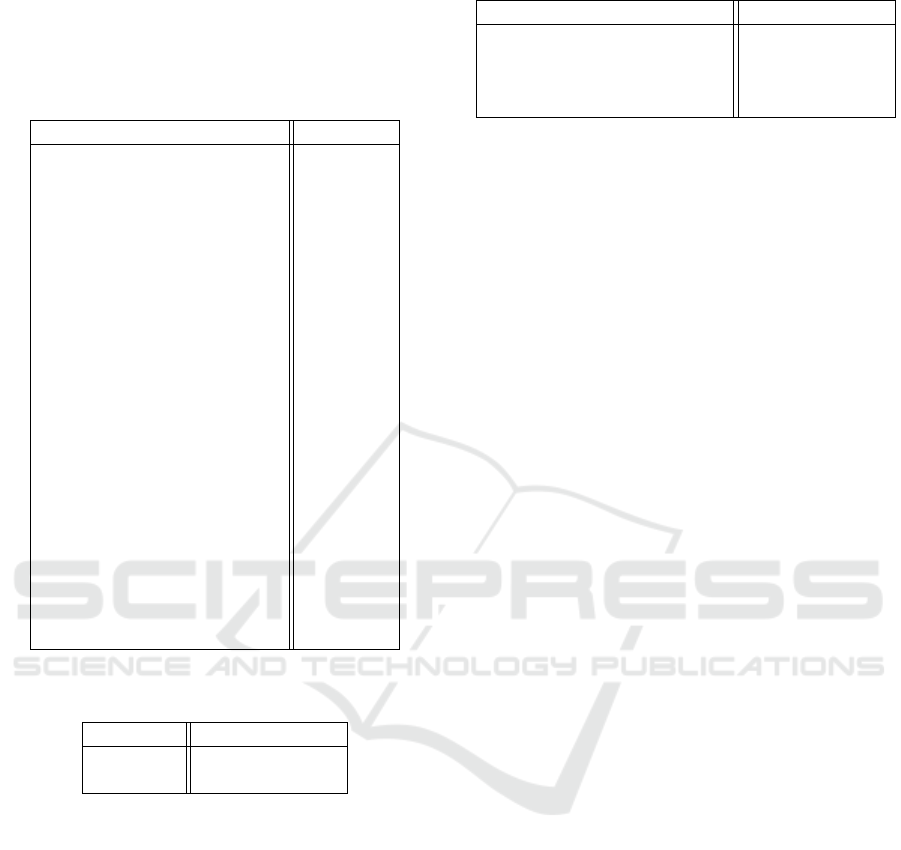
Table 4: Fusion using different combinations on the Comp-
Cars’s web data. The test dataset is divided on three sections
per view port. we test combinations on their respective sec-
tion. FB: Front Bumper, FH: Front Hood, FG: Front Grilles,
FLL: Front Left Light, FRL: Front Right Light, RB: Rear
Bumper, RT: Rear Trunk, RLL: Rear Left Light, RRL: Rear
Right Light.
Combination Compcars
———-Front View———
full image + FB 96.12%
full image + FH 94.33%
full image + FG 92.74%
full image + FLL 45.36%
full image + FRL 46.85%
All Front parts 91.36%
full image + FB + FH + FG 92.65%
full image + FLL + FRL 90.12%
FB + FH + FG + FLL + FRL 84.12%
———-Rear View———
full image + RB 91.11%
full image + RT 94.14%
full image + RLL 68.12%
full image + RRL 65.45%
All Rear parts 88.24%
RB + RT + RLL + RRL 65.26%
full image + RB + RT + RLL 87.26%
full image + RB + RT 89.22%
full image + RLL + RRL 62.25%
———–Side View———
full image 91.23%
Table 5: Comparison of the baseline VGG16 with our ap-
proach.
Approach CompCars(web)
Baseline 92.66%
Ours 95.07%
full image (Baseline) and our proposed approach. It
is clear that the proposed selective multi-stream com-
bination method improves considerably the perfor-
mance with a gain of 2.41%.
Table 6 shows recent results on the CompCars
dataset were approaches with no deep convolutional
networks achieves worst result such as Yang (Yang
et al., 2015). BoxCars (Sochor et al., 2016) and
Baseline VGG16 (Simonyan and Zisserman, 2014)
rely on deep networks for global features represen-
tation. However, best results such as SWP-CNN(Hu
et al., 2017) and WindowResnet(Ghassemi et al.,
2018) used part based approaches. Our approach,
combined both global and local representation allow-
ing the system to be robust.
Table 6: Comparison with our approach.
Approach CompCars(web)
Yang(Yang et al., 2015) 76.7%
BoxCars(Sochor et al., 2016) 84.8%
Ours(VGG16) 95.07%
SWP-CNN(Hu et al., 2017) 97.6%
5 CONCLUSION
In this work, we have proposed a multi-Stream deep
networks for Vehicle Make and Model Recognition.
The proposed approach combines global representa-
tion with local representations using a dynamic fully-
connected layer, the multi-stream architecture allows
the system to use specialized feature extractors to de-
tect subtle inter-class variations. It also allows the
combination of variable number of vehicle part thanks
to the dynamic fusion layer. Our experiments shows
that our model provides efficient results on the pub-
licly available CompCars dataset.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Comput. Vis. Image
Underst., 110(3):346–359.
Biglari, M., Soleimani, A., and Hassanpour, H. (2018). A
cascaded part-based system for fine-grained vehicle
classification. IEEE Transactions on Intelligent Trans-
portation Systems, 19(1):273–283.
Cheang, T. K., Chong, Y. S., and Tay, Y. H. (2017).
Segmentation-free vehicle license plate recognition
using convnet-rnn. CoRR, abs/1701.06439.
Du, S., Ibrahim, M., Shehata, M., and Badawy, W. (2013).
Automatic license plate recognition (alpr): A state-
of-the-art review. IEEE Transactions on Circuits and
Systems for Video Technology, 23(2):311–325.
Gao, Y. and Lee, H. J. (2015). Vehicle make recognition
based on convolutional neural network. In 2015 2nd
International Conference on Information Science and
Security (ICISS), pages 1–4.
Ghassemi, S., Fiandrotti, A., Caimotti, E., Francini, G., and
Magli, E. (2018). Vehicle joint make and model recog-
nitionwith multiscale attention windows. Signal Pro-
cessing: Image Communication, 72.
Gou, C., Wang, K., Yao, Y., and Li, Z. (2016). Vehicle li-
cense plate recognition based on extremal regions and
restricted boltzmann machines. IEEE Transactions on
Intelligent Transportation Systems, 17(4):1096–1107.
He, H., Shao, Z., and Tan, J. (2015). Recognition of car
makes and models from a single traffic-camera image.
IEEE Transactions on Intelligent Transportation Sys-
tems, 16(6):3182–3192.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
418

He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Hsieh, J., Chen, L., and Chen, D. (2014a). Symmetrical surf
and its applications to vehicle detection and vehicle
make and model recognition. IEEE Transactions on
Intelligent Transportation Systems, 15(1):6–20.
Hsieh, J., Chen, L., and Chen, D. (2014b). Symmetrical surf
and its applications to vehicle detection and vehicle
make and model recognition. IEEE Transactions on
Intelligent Transportation Systems, 15(1):6–20.
Hsu, G., Chen, J., and Chung, Y. (2013). Application-
oriented license plate recognition. IEEE Transactions
on Vehicular Technology, 62(2):552–561.
Hu, Q., Wang, H., Li, T., and Shen, C. (2017). Deep cnns
with spatially weighted pooling for fine-grained car
recognition. IEEE Transactions on Intelligent Trans-
portation Systems, 18(11):3147–3156.
Jaderberg, M., Simonyan, K., Zisserman, A., and
Kavukcuoglu, K. (2015). Spatial transformer net-
works. CoRR, abs/1506.02025.
Khan, S. M., Cheng, H., Matthies, D., and Sawhney, H.
(2010). 3d model based vehicle classification in aerial
imagery. In 2010 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
1681–1687.
L. Yang, P. Luo, C. C. L. X. T. (2015). A large-scale
car dataset for fine-grained categorization and verifi-
cation. arXiv:1506.08959.
Lai, A. H. S., Fung, G. S. K., and Yung, N. H. C.
(2001). Vehicle type classification from visual-based
dimension estimation. In ITSC 2001. 2001 IEEE In-
telligent Transportation Systems. Proceedings (Cat.
No.01TH8585), pages 201–206.
Li, H. and Shen, C. (2016). Reading car license plates using
deep convolutional neural networks and lstms. CoRR,
abs/1601.05610.
Li, H., Wang, P., and Shen, C. (2017). Towards end-to-end
car license plates detection and recognition with deep
neural networks. CoRR, abs/1709.08828.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the Seventh IEEE
International Conference on Computer Vision, vol-
ume 2, pages 1150–1157 vol.2.
Lowe, D. G. (2001). Local feature view clustering for
3d object recognition. In Proceedings of the 2001
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition. CVPR 2001, volume 1,
pages I–I.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Luvizon, D. C., Picard, D., and Tabia, H. (2018). 2d/3d
pose estimation and action recognition using multitask
deep learning. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
5137–5146.
Masood, S. Z., Shu, G., Dehghan, A., and Ortiz, E. G.
(2017). License plate detection and recognition using
deeply learned convolutional neural networks. CoRR,
abs/1703.07330.
Paumard, M.-M., Picard, D., and Tabia, H. (2018). Image
reassembly combining deep learning and shortest path
problem. In Proceedings of the European Conference
on Computer Vision (ECCV), pages 153–167.
Psyllos, A., Anagnostopoulos, C.-N., and Kayafas, E.
(2009). Sift-based measurements for vehicle model
recognition. 1.
Psyllos, A. P., Anagnostopoulos, C. E., and Kayafas, E.
(2010). Vehicle logo recognition using a sift-based
enhanced matching scheme. IEEE Transactions on
Intelligent Transportation Systems, 11(2):322–328.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv.
Sam, D. B., Surya, S., and Babu, R. V. (2017). Switching
convolutional neural network for crowd counting. In
2017 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 4031–4039. IEEE.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Sochor, J., Herout, A., and Havel, J. (2016). Boxcars: 3d
boxes as cnn input for improved fine-grained vehicle
recognition. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 3006–
3015.
Wei Wu, Zhang QiSen, and Wang Mingjun (2001). A
method of vehicle classification using models and
neural networks. In IEEE VTS 53rd Vehicular Tech-
nology Conference, Spring 2001. Proceedings (Cat.
No.01CH37202), volume 4, pages 3022–3026 vol.4.
Xiaoxu Ma and Grimson, W. E. L. (2005). Edge-based
rich representation for vehicle classification. In Tenth
IEEE International Conference on Computer Vision
(ICCV’05) Volume 1, volume 2, pages 1185–1192 Vol.
2.
Yang, L., Luo, P., Loy, C. C., and Tang, X. (2015). A large-
scale car dataset for fine-grained categorization and
verification. CoRR, abs/1506.08959.
Yishu Peng, Yunhui Yan, Wenjie Zhu, and Jiuliang Zhao
(2014). Vehicle classification using sparse coding
and spatial pyramid matching. In 17th International
IEEE Conference on Intelligent Transportation Sys-
tems (ITSC), pages 259–263.
Multi-stream Deep Networks for Vehicle Make and Model Recognition
419
