Regression-based 3D Hand Pose Estimation using Heatmaps
Chaitanya Bandi and Ulrike Thomas
Robotics and Human-Machine-Interaction Lab, Chemnitz University of Technology, Reichenhainer str. 70,
Chemnitz, Germany
Keywords: Convolutional Neural Networks, Pose, Heatmaps, Regression.
Abstract: 3D hand pose estimation is a challenging problem in human-machine interaction applications. We introduce
a simple and effective approach for 3D hand pose estimation in grasping scenarios taking advantage of a low-
cost RGB-D camera. 3D hand pose estimation plays a major role in an environment where objects are handed
over between the human and robot hand to avoid collisions and to collaborate in shared workspaces. We
consider Convolutional Neural Networks (CNNs) to determine a solution to our challenge. The idea of
cascaded CNNs is very appropriate for real-time applications. In the paper, we introduce an architecture for
direct 3D normalized coordinates regression and a small-scale dataset for human-machine interaction
applications. In a cascaded network, the first network minimizes the search space, then the second network is
trained within the confined region to detect more accurate 2D heatmaps of joint’s locations. Finally, 3D
normalized joints are regressed directly on RGB images and depth maps can lift normalized coordinates to
camera coordinates.
1 INTRODUCTION
In a Human-Machine Interaction (HMI) environment,
3D pose of the hand is significant. When handing over
objects between machines like robots and humans, it is
important to recognize and track the human hand in
order to avoid collisions and collaboration. For
grasping objects, in addition to tracking the hand it is
also important to track the objects. The aim is to find
free space on the surface of the object to grasp it. Thus,
the most important information is the position of
fingers. The robot should not grasp where humans hold
the object as shown in Figure 1. 3D hand pose tracking
has many such applications, including sign language,
virtual reality, and gesture recognition but the building
blocks of this paper have been motivated for robotics
applications.
In the past few years, pose estimation has gained
significant attention and has been improved, but in a
human-robot collaboration scenario, high dexterity and
self-occlusion of the human hand increase the
complexity of 3D hand pose estimation. It still is a
challenging issue. Due to high self-occlusion and
dexterity, sensing equipment is preferred like markers,
data-gloves or motion capture sensors to communicate
with robots and to acquire the dataset. Most of the
state-of-the-art techniques rely completely on depth
information to estimate the 3D hand pose. The sensors
like Kinect and Intel Realsense provide both RGB and
depth information. With the information from low-cost
RGB-D cameras, Convolutional Neural Networks
(CNNs) have become the norm for pose estimation
techniques.
In this paper, we introduce a complete pipeline for
tracking the upper body pose and 3D hand pose in
human-robot collaborated workspace. Due to
integration flexibility, the Intel Realsense D435
camera will be considered for hand over applications
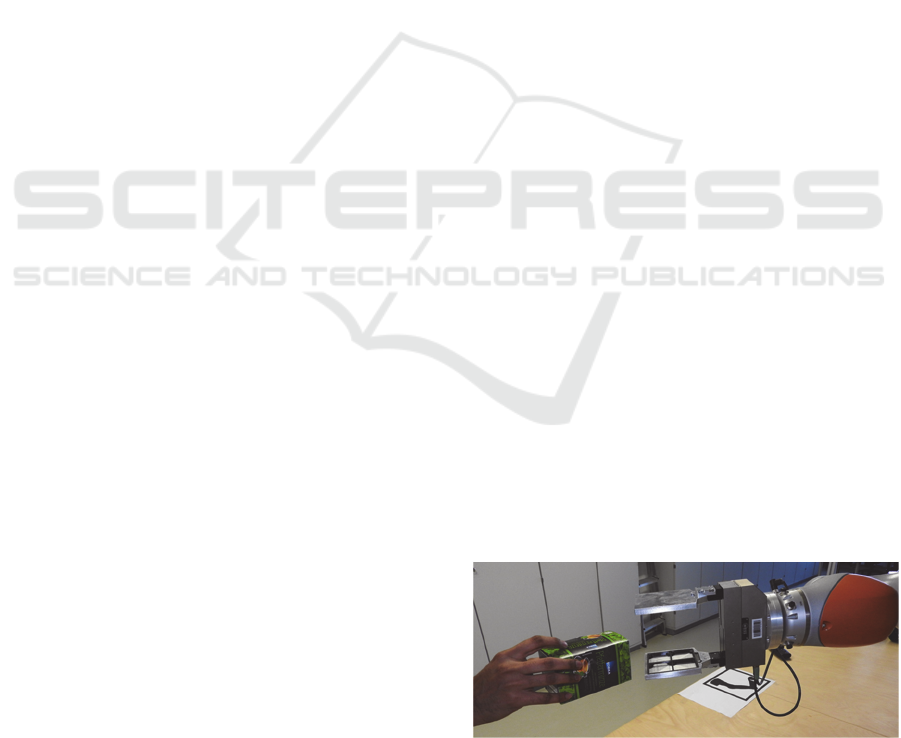
in HMI environments as shown in Figure 1. Our goal
is to estimate 3D human upper body poses and 3D hand
poses in RGB images, given the respective aligned
depth maps. Our approach consists of cascaded CNNs,
post-processing to extend 2D heatmaps to 3D pose, and
direct regression of the 3D pose from the network. The
first network localizes the upper body and hand in the
scene.
Figure 1: Human-Robot interaction.
636
Bandi, C. and Thomas, U.
Regression-based 3D Hand Pose Estimation using Heatmaps.
DOI: 10.5220/0008973206360643
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
636-643
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Localization drastically reduces the search space and
further passed through the second cascaded network
that estimates the heatmaps of keypoints in 2D images
and then regresses the 3D normalized pose. Finally, the
3D normalized coordinates are transformed into
camera coordinates or world coordinates. In addition to
the unique pose network, we introduce a new small-
scale multiview hand pose dataset (SSMH) for HMI
applications.
2 RELATED WORKS
3D hand pose estimation is a very challenging task due
to the high dexterity of the human hand (i.e., 21 degrees
of freedom). We briefly review the state-of-the-art of
2D and 3D pose estimation methods that were
successful over the past few years. The successful
breakthrough in pose estimation was related to human
pose estimation as in (Tompson et al., 2014) and
(Toshev and Szegedy., 2014). The idea of belief maps
was mentioned by (Wei et al., 2016) for 2D human
pose estimation applying convolutional pose
machines. Many papers were published based on this
idea of heatmaps to improve the accuracy and to
provide further extensions to 3D (Garcia-Hernando et
al., 2018). (Tompson et al., 2014) presented the idea of
hand pose recovery implementing CNNs in real-time
inferring intermediate heatmap features to extract
accurate 3D pose with the help of an inverse kinematic
model on depth datasets. (Wan et al., 2017) proposed a
deep 3D hand pose estimation approach that uses depth
images. In this approach, depth feature maps from
CNNs were divided into regions to form a tree-
structured region ensemble network, these regions are
passed through fully connected layers for 3D
coordinate regression and for better accuracy.
Later, 3D hand pose estimation in single RGB
images was proposed by (Zimmermann and Brox,
2017). A three-network structured approach consisting
of HandSegNet for hand segmentation, PoseNet for 2D
keypoints and lifting to 3D pose. (Zimmermann and
Brox, 2017) created synthetic 2D and 3D hand pose
datasets where the inference model cannot generalize
well on real test data. Although the proposed network
is efficient, it cannot be applicable in real-time. An
extension to this is introduced in (Mueller et al., 2018).
(Mueller et al., 2018) is one of the best state-of-the-art
RGB only based 3D hand pose estimation
architectures. One of the best state-of-the-art
techniques for heatmap generation is mentioned in
(Newell, Yang, and Deng, 2016). The authors use a
stacked hourglass network to retain 2D heatmap
information. (Wan et al., 2017) also worked on a
similar idea of heatmaps on depth images for 2D and
3D, in addition to 3D directional vectors for 3D
regression of hand pose. The further extensions to
stacked hourglass network can be observed in (Zhou et
al., 2017). The 2D CNNs are trained to infer heatmaps
and the authors extend the network to output the 3D
pose by adding a regression network. The unique
pipeline presented in this paper is developed based on
(Zhou et al., 2017).
To train the pose estimation architectures, the
datasets are the key. There are many hand datasets
available for research purposes, and most of them are
captured for certain application. The most widely used
open-source datasets are the NYU hand dataset
(Tompson et al., 2014), ICVL (Tang et al., 2014), and
the First-Person Hand Action Benchmark (Garcia-
Hernando et al., 2018). The datasets consist of depth
images with respective keypoints in 2D and 3D as the
labeled dataset. The first-person action database is a
large-scale dataset with depth maps, and it is annotated
using motion capture sensors and kinematics. The
available RGB datasets are the GANerated dataset
(Mueller et al., 2018) and Large-Scale Multiview hand
pose dataset (LSMH) (Gomez-Donoso, Orts-Escolano,
and Cazorla, 2017). GANerated dataset is a hybrid
dataset that builds a bridge between real and synthetic
data for better generalization of trained network, but
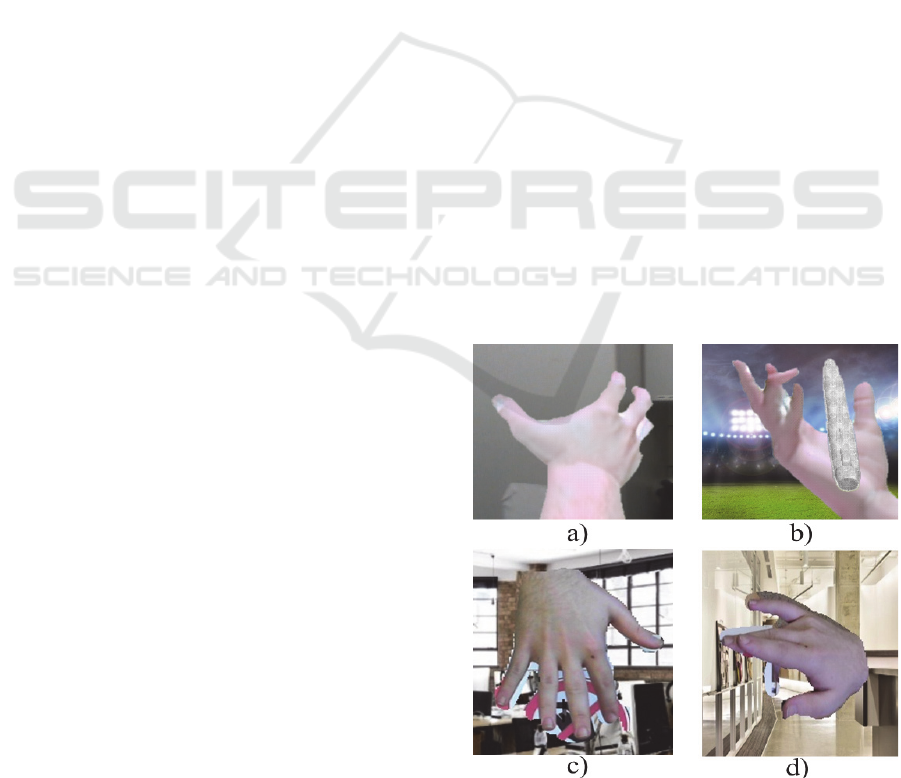
the data is egocentric. GANerated images are shown in
Figure 2a and 2b. The LSMH pose dataset is captured
with a leap motion sensor calibrated with 4 RGB
cameras with distinct views, the dataset has many
outliers. Few sample images can be seen in Figures 2c
and 2d.
Figure 2: a) GANerated Hands with self-occlusion, b) with
object occlusion, c) and d) LSMH dataset.
Regression-based 3D Hand Pose Estimation using Heatmaps
637
3 PROPOSED METHOD
The goal of the new efficient approach is to infer 3D
joints of the human hand and the pose of the upper
body. We tackle this problem using two-staged CNNs.
Given a color image 𝐼∈𝑅
𝑁𝑥𝑀𝑥3, the first network
localizes the persons and their respective hands in the
image. The localization reduces the search space for
the 2D pose estimation network. Object localization
has gained many research advancements since the
introduction of CNNs. In this paper, we experiment
with an architecture to estimate the 3D pose of the hand
on the frame level. Cascaded CNNs are extremely
helpful in multi-feature tracking applications (i.e.,
human, face and hand pose tracking). To work in a
collaborated environment, human tracking and hand
pose tracking is the key task to avoid collisions and to
work as a team. In this approach, two-staged cascaded
networks seem feasible for tracking hands and the
upper body. The localized result from the first network
can be connected to the distinct branches as described
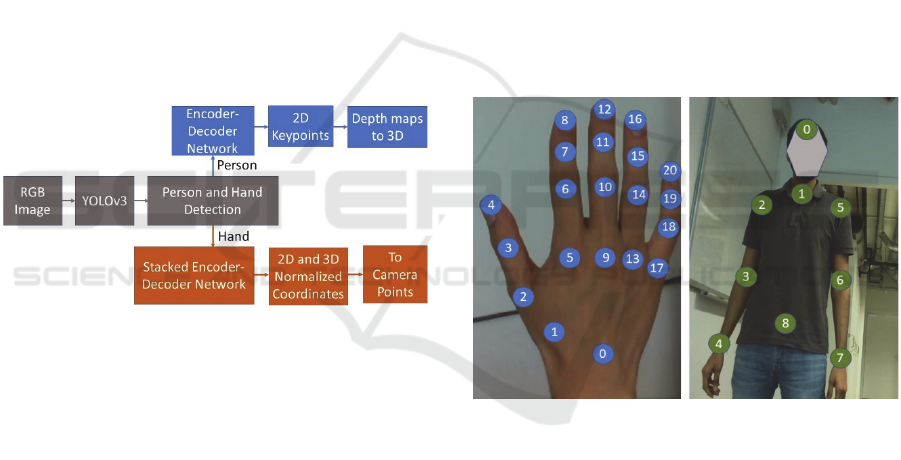
in Figure 3 to obtain 3D hand poses and/or body poses.
Figure 3: Proposed architecture, the gray blocks represent
localization network, the blue blocks represent upper body
pose estimation network, and the orange blocks represent the
hand pose network.
3.1 Localization Network
In the localization network, object detection technique
is used to obtain the region of interests (i.e., body and
hands) as a bounding box and its score threshold. Since
object detection is a highly researched topic, a
significant number of architectures are built for object
detection (e.g., ResNet (He et al., 2015), MobileNet
(Howard et al., 2017), Darknet (Redmon et al. 2018).
You only look once (YOLO) is one of the state-of-the-
art real-time object detection system that uses the
Darknet architecture. The more recent YOLOv3
(Redmon and Farhadi, 2018) architecture is fast and
accurate compared to its predecessors and other
available architectures. In this work, frame-based
person and hand detection are trained by applying
transfer learning on YOLOv3 darknet-53 architecture
using the MPII Human Pose dataset (Andriluka et al.,
2014). Leveraging the 2D keypoints extrema,
bounding boxes were extracted from the MPII dataset.
Since the dataset does not provide bounding box
locations of the hands, hands were trained with a
custom dataset and ego-hands dataset (Bambach et al.,
2015). The network is retrained with these datasets.
3.2 Pose Network
Once the persons and hands are localized, the image
containing hand is passed through the second network
to detect heatmaps of 2D keypoints of respective hands
in given RGB images. To estimate 3D coordinates, one
could use the depth map to extend the 2D keypoints to
3D using calibration parameters. Another possibility is
to train an encoder-decoder architecture to detect
heatmaps and to directly regress 3D joints on RGB
images. For training the network, the joint order must
be preserved for visualization and further processing.
Body joints and hand joints order used for training can
be observed in Figure 4.
Figure 4: Hand and body joint annotation order.
3.2.1 SSMH Pose Dataset
In this work, the GANerated dataset and the LSMH
pose dataset are considered for the experimentation
with an RGB pipeline. Both datasets provide 2D and
3D joint locations of fingers and they have certain
limitations. In addition to the available public datasets,
we introduce a SSMH pose dataset. The dataset was
captured using Intel Realsense D435 cameras in
distinct settings. In the first setting, hand images and
the respective aligned depth images are captured
without self-occlusions. In the second set, two cameras
are placed orthogonal to each other and calibrated
together. The simultaneous frames with respective
RGB and aligned depth information are captured.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
638
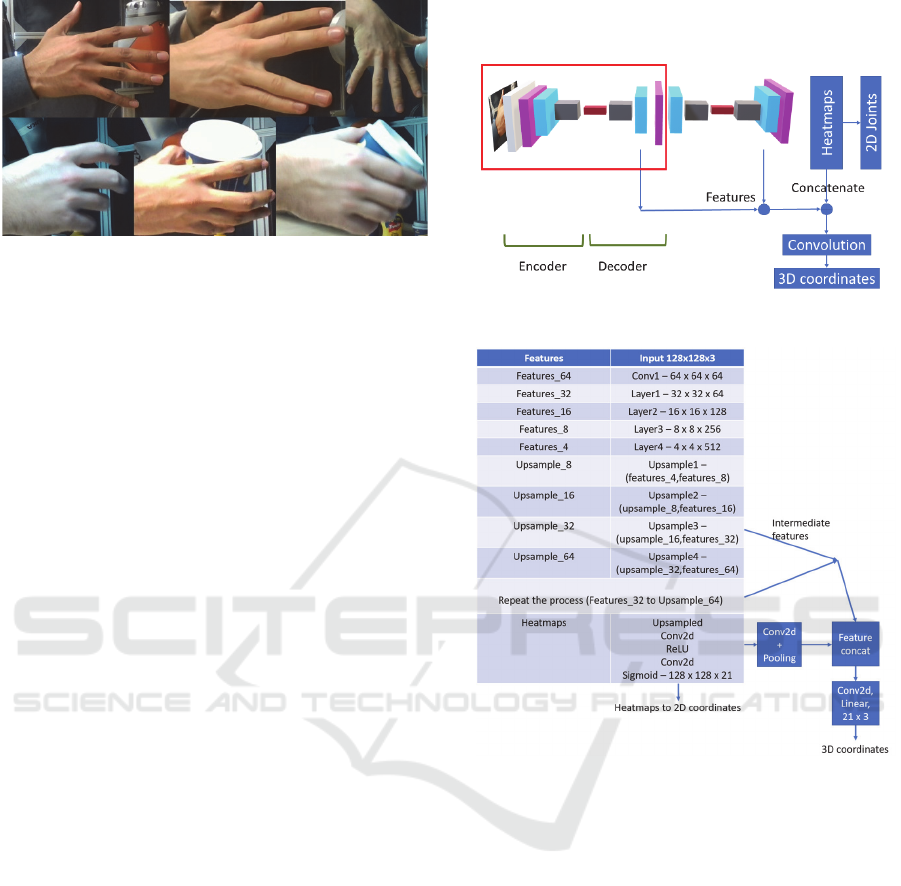
Figure 5: top: Single camera setting without self-occlusions,
bottom: Two camera calibrated orthogonal to each other with
self-occlusions.
The transformations are used to convert keypoints
from one camera to another. The keypoints are labeled
manually. In two camera settings, the visible points in
each image are labeled. Then the visible 2D keypoints
are extended to 3D using the depth map and the
intrinsic parameters. The images from dataset can be
observed in Figure 5. In Figure 5, bottom, images are
captured using two views and based on keypoint
visibility all 21 joints are manually annotated. The
advantage of this dataset is that both RGB images and
depth images are available for experimentation unlike
available dataset.
3.2.2 Stacked Encoder-decoder Architecture
One of the successful approaches to regress 3D joints
are implemented on human pose estimation as
described in (Zhou et al., 2017). In this work, we
consider encoder-decoder architecture as the ratios of
input and output images must be kept constant. The
outputs of such architecture are 2D heatmaps of the
joints. To create encoder-decoder architecture
ResNet34 blocks are used. Instead of single encoder-
decoder architecture, a stacked encoder-decoder
network is designed for better generalization of data.
Heatmaps of 21 joints are considered for training. To
this network, we add a regressor block to train the 3D
coordinates of normalized joints, the simple overview
of the architecture is mentioned in Figure 6. In this
architecture, images with three channels (i.e., RGB)
are passed as input features. The input images of size
3x128x128 pixels and with convolution, features are
extracted from 64x64x64 to as low as 512x4x4. Then
the features are again upsampled using bilinear
interpolation from 512x4x4 to 64x64x64.
The process is repeated for one more stage and the
output heatmaps are processed and concatenated with
intermediate features and passed through
convolutional block. Finally, features are linearized to
get 3D normalized joint coordinates. The complete
feature representation architecture can be understood
from Figure 7.
Figure 6: Stacked encoder-decoder architecture.
Figure 7: Feature representation of encoder-decoder
architecture.
3.3 Pose Estimation
3.3.1 Upper Body Pose Estimation
From a localization network, a person and their
respective hands are detected. The results of the
localized network can be seen in Figure 8 left. The
localized person is passed through single encoder-
decoder architecture. As the 3D joints information of
the MPII pose dataset is not available, 2D pose
information is trained with the single model. The
applied single encoder-decoder can be seen in Figure 6
(i.e., in red block). The images are scaled to similar size
for batch normalization during training process. 20k
images and their respective heatmaps are used for
training.
Figure 8 right represents the detection of 2D
keypoints of a person. Once 2D keypoints are
Regression-based 3D Hand Pose Estimation using Heatmaps
639

estimated, joints are extended to 3D using depth maps
and camera calibration parameters.
Figure 8: left: Bounding box, right: 2D Pose.
3.3.2 Hand Pose Estimation
The architecture mentioned in section 3.2.2 can be
trained for 3D hand pose estimation. Since the LSMH
pose dataset, the SSMH dataset introduced in this
paper and the GANerated hands dataset contains 3D
and 2D joint locations, we experiment with stacked
encoder-decoder architecture for 3D pose regression.
To train the network, images must be pre-processed
(i.e., resizing the image and generating the heatmaps
before passing through the training loop). Closely
cropped hands from the localized network are first
resized to 128x128 pixels and respective gaussian
heatmaps of joints are generated with the size
21x128x128. The 3D joints are normalized with
respect to the position of middle finger joint or joint
number 9 in Figure 4 left for LSMH dataset and SSMH
dataset. For GANerated dataset, 3D joints provided are
normalized with respect to joint 9 and normalized
distance from joint 0 to joint 9 is 1. This normalization
assumes that the most constant values are joint 0 and
joint 9.
Once the 2D heatmaps are estimated, the depth map
of the respective RGB image with calibration
parameters can be used to extend 2D joint positions to
3D coordinates. This technique can be implemented in
an application where the average coverage area of
fingers is adequate instead of accurate fingertips or in
an application where self-occlusion is neglected. The
spatial error due to conversion from 2D to 3D can be
fixed with the help of the kinematic chain model.
3.3.3 Pose Estimation on LSMH Data,
GANerated Data and SSMH Data
The LSMH pose dataset contains real images, the
regressor architecture is trained with the dataset. Figure
9a contains images from the validation dataset. The 2D
keypoint detections can be observed in Figure 9a. It
might be seen that the detections have a slight error in
2D, but it is, in fact, an error in the dataset. The ground
truth keypoints from leap motion sensor were not post-
processed.
Later, the architecture is trained with GANerated
hands dataset. This dataset contains over 300k
synthetic images with and without objects. The
GANerated dataset is highly egocentric and the hands
have high self-occlusion. The output of the network
with 2D keypoints can be seen in Figure 9b. We can
observe that the detected 2D keypoints are almost error
free even for high self-occlusion.
Finally, encoder-decoder architecture is trained
with SSMH dataset introduced in this paper. The
dataset consists of 5000 images with and without self-
occlusions for training. Once the joints are normalized,
coordinates are in lower dimension and they can
converge faster to minima during the training process.
2D keypoint detection can be seen in Figure 9c. 3D
hand pose estimation of all the dataset can be observed
in Figure 10.
Figure 9: 2D detections, a) detection on LSMH dataset, b)
detections on GANerated dataset, and c) detections on SSMH
dataset.
4 EXPERIMENTS
4.1 Training Parameters
The proposed pipeline is implemented in Python using
the Pytorch library. We opted to Pytorch as it is faster
compared to Tensorflow and supports easy integration
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
640
with the Numpy library. For the localization network,
approximately 22k images were considered for
training. For estimating the upper body pose, the
complete MPII dataset was trained for 1000 epochs
with a batch size of 32 and 8 parallel workers on Nvidia
1080 Ti 12 GB memory.
From LSMH pose dataset, only 35k images with
minimal error were considered for training with
stacked encoder-decoder architecture. The weights for
training the network were randomized and the
complete architecture was trained from scratch. Since
the GANerated hands dataset is synthetic, images
contain a wide range of occlusions. Over 300k images
were considered for training. Weights were
randomized for SSMH dataset for training, only 5k
labeled images were considered for training. The
datasets were trained with multiple optimizers to test
the accuracy. The optimizer used for this network is the
RMSprop. Variable learning rates were implemented
based on the number of epochs, varying from 0.005 to
0.00025. All datasets were trained for over 1000
epochs with 16 to 32 images per batch and
approximately 8 to 12 parallel workers. Since the
output is image coordinates or 3D coordinates, the
Mean Squared Error (MSE) loss is the best fit for
regression applications.
L
=
1
n
predicted−actual
(1)
MSE is calculated for both 2D keypoints and 3D
keypoints. All the models were trained using Nvidia
1080 Ti 12 GB GPU and tested on Nvidia 1050 Ti 4
GB GPU memory.
4.2 Evaluation
We evaluated our approach with multiple experiments
to achieve the best possible solution. As mentioned in
section 3.2, we considered the bounding box approach
to localize hands and persons in a single RGB image.
The encoder-decoder architecture was developed
based on the idea of hourglass but with ResNet
architecture. The prior mentioned datasets are trained
with stacked encoder-decoder architecture. The results
can be observed in Figure 10.
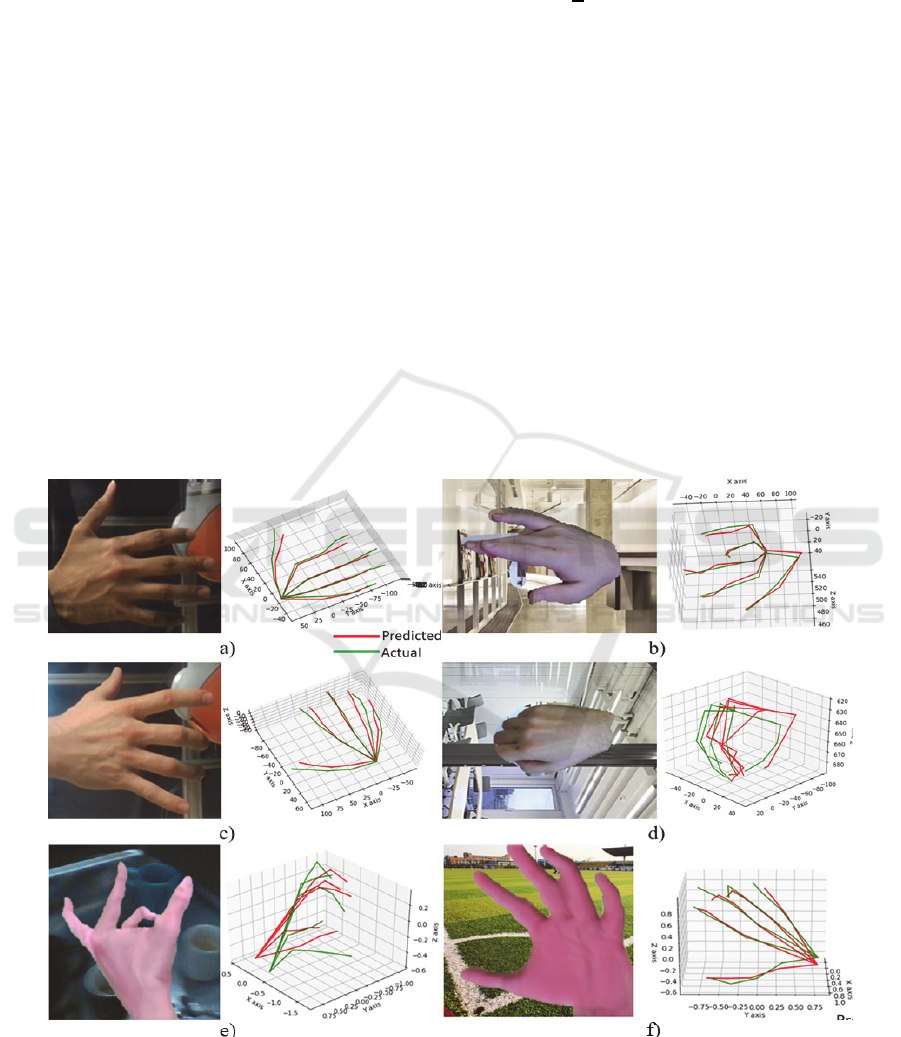
Figure 10: 3D hand pose, a) and c) are images from SSMH dataset, b) and d) are images from LSMH dataset, e) and f) are from
GANerated dataset, a) Open hand without occlusions and respective 3D hand pose, c) 3D hand pose on closed hand with low
self-occlusion. b) Self-occluded fingers and respective 3D hand pose of LSMH dataset, d) and f) high self-occluded detections,
predicted values are plotted in red color and actual values are plotted in green color.
Regression-based 3D Hand Pose Estimation using Heatmaps
641
The performance of the LSMH dataset can be
observed in Table 1. With encoder-decoder
architecture, the performance of images is very
acceptable. 3D detections on all datasets can be
observed in Figure 10. Figure 10a does not contain any
self-occlusion and the MSE was as low as 20 mm. In
Figure 10b, there is a slight self-occlusion between
three fingers and the MSE was around 27 mm. In
Figure 10d, the fingers are completely closed, and the
network failed to generalize in such situations. Figure
10e and f represents the GANerated hands 3D hand
pose output.
(
Gomez-Donoso et al., 2018
)
utilized
LSMH dataset for 2D applications and the
improvement in MSE error can be seen in Table 1.
Table 1: Performance of the validation set.
Large-scale
Multiview hands
Mean 3D Pose
error (mm) over
5000 images
Mean 2D Pose
error (px) over
5000 images
(Gomez-Donoso
et al., 2018)
- 10
Proposed metho
d
20-65 8.58
The performance of the GANerated Hands dataset
can be observed in Figure 11. MSE of all joints is
represented in the bar graph. We can clearly observe
that the error is high with respect to visibility. Joint
numbers 4, 8, 12, 16, 20 are the fingertip locations and
there exists high error compared to other joints due to
self-occlusion and/or object occlusion. Since the
dataset consists of normalized 3D joint coordinates,
comparison with (Mueller et al., 2018) was not
possible. (Mueller et al., 2018) preferred a different
metric to evaluate the performance of their architecture
on GANerated dataset.
Figure 11: 3D coordinates MSE of GANerated dataset.
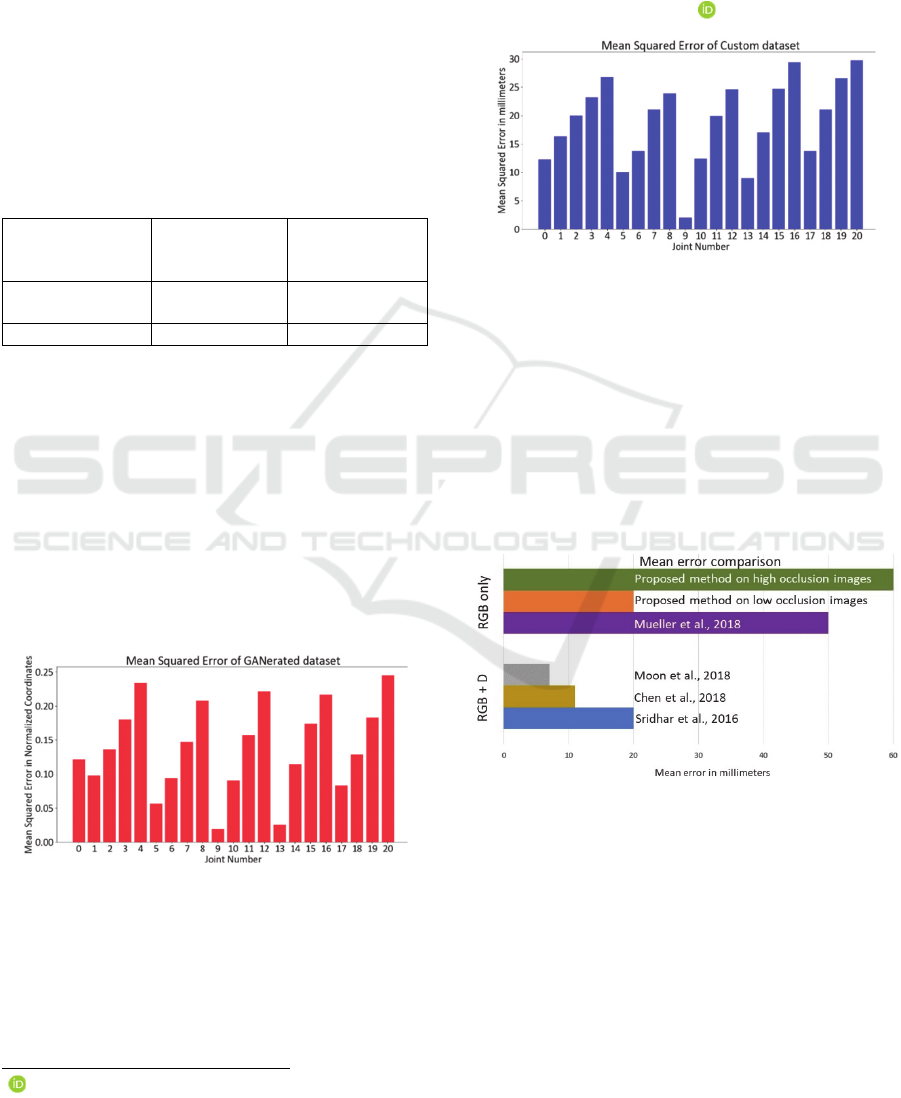
Similarly, SSMH dataset is evaluated using MSE.
The dataset has keypoints with respect to camera
coordinates and is normalized with respect to joint 10.
The MSE error was estimated in millimeters. Figure 12
represents the error of 21 joints individually. From the
1
https://orcid.org/0000-0001-7339-8425
Figure 12, we can observe that the pose estimation of
fingertips has an error as high as 30 mm. Overall MSE
achieved is as low as 19 mm. The MSE was estimated
strictly on 500 images. Images with high self-occlusion
achieved MSE over 60 mm. We work on adding more
images to SSMH dataset. Once the dataset is refined, it
will be released as open source for researchers and
further information found in
1
.
Figure 12: 3D coordinates MSE of our dataset.
There exist algorithms for 3D keypoint regression
but most of the algorithms work with RGB image
localization and regression on direct depth maps or
pointcloud. The state-of-the-art depth-based methods
like (Chen et al., 2018), and (Moon et al., 2018)
achieved MSE less than 7 mm as in Figure 13. Figure
13 represents the mean error of hand joints between
RGB based and RGB-D based methods. (Mueller et al.,
2018) achieved a mean error as low as 50 mm with
high occlusion datasets.
Figure 13: Mean error of hand joints in comparison to state-
of-the-art RGB and RGB-D architectures.
We estimated the mean error for both low
occlusion and high occlusion images and mean error is
as low as 20 mm and as high as 60 mm respectively on
SSMH dataset. We can observe that, the depth-based
methods have low mean error compared to RGB only
architectures. Nevertheless, RGB based methods have
high potential to be improved further. In HMI
applications highly occluded data is necessary and if
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
642

the data is specifically captured in that workspace, then
the performance of the network can be improved
further.
5 CONCLUSIONS
We proposed a cascaded CNN pipeline for the upper
body pose and the 3D hand pose estimation. Heatmaps
and regression techniques are the norms for pose
estimation in direct RGB images. We experimented
with the stacked encoder-decoder architecture for
heatmap based 2D detections and 3D direct regression.
Two large-scale RGB datasets and a new SSMH
custom dataset were considered for training and testing
the performance of the proposed network. We
observed that the network performs well under
occlusions for all the datasets. We achieved the mean
error as low as 20 mm for images containing minimal
or no occlusions and mean error is over 60 mm for
highly occluded images from SSMH dataset. To apply
the proposed pipeline in real-time Human-Machine-
Interaction applications, occlusion dataset must be
extended and retrained. Further improvements like
kinematic fitting and tracking could help in fingertip
refinement.
ACKNOWLEDGEMENTS
This research is supported by Saechsische
AufbauBank (SAB – application no. 100378180).
REFERENCES
Tompson, J., Stein, M., Lecun, Y., Perlin, K., 2014. Real-
Time Continuous Pose Recovery of Human Hands Using
Convolutional Networks. ACM Transactions on
Graphics, 33(5):1– 10.
Wei, S., Ramakrishna, V., Kanade, T., Sheikh, Y., 2016.
Convolutional pose machines. In Proc. of the IEEE Conf.
on Computer Vision and Pattern Recognition (CVPR),
pages 4724–4732.
Toshev, T., Szegedy, C., 2014. Human pose estimation via
deep neural networks. In Proc. of the IEEE Conf. on
Computer Vision and Pattern Recognition (CVPR),
pages 1653–1660.
Wan, C., Thomas, P., Van Gool, L., Yao, A., 2017. Dense 3D
Regression for Hand Pose Estimation.
arXiv:1711.08996v1 [cs.CV].
Garcia-Hernando, G., Yuan S., Baek, S., Kim T.K., 2018.
First Person Hand Action Benchmark with RGB-D
Videos and 3D Hand Pose Annotations.
arXiv:1704.02463v2 [cs.CV].
Zimmermann, C., Brox, T., 2017. Learning to Estimate 3D
Hand Pose from Single RGB Images.
arXiv:1705.01389v3 [cs.CV].
Mueller, F., Bernard, F., Sotnychenko, O., Mehta, D.,
Sridhar, S., Casas, D., and Theobalt, C., 2018.
GANerated Hands for Real-Time 3D Hand Tracking
from Monocular RGB. CVPR 2018.
Gomez-Donoso F., Orts-Escolano, S., Cazorla, M., 2017.
Large Scale Multiview 3D Hand Pose Dataset.
arXiv:1707.03742v3.
Bambach, Sven and Lee, Stefan and Crandall, David, J., and
Yu, Chen, 2015. Lending A Hand: Detecting Hands and
Recognizing Activities in Complex Egocentric
Interactions, The IEEE International Conference on
Computer Vision (ICCV).
Newell, A., Yang, K., Deng, J., 2016. Stacked Hourglass
Networks for Human Pose Estimation
arXiv:1603.06937v2 [cs.CV].
Zhou, X., Huang, Q., Sun, X., Xue, X., Wei, Y., 2017.
Towards 3D Human Pose Estimation in the Wild: a
Weakly-supervised Approach, Shanghai Key Laboratory
of Intelligent Information Processing School of
Computer Science, Fudan University, The University of
Texas at Austin, Microsoft Research
arXiv:1704.02447v2 [cs.CV].
Tang, D., Chang, H.J., Tejani, A., Kim, T.K., 2014. Latent
Regression Forest: Structural Estimation of 3D
Articulated Hand Posture, Proc. of IEEE Conf. on
Computer Vision and Pattern Recognition (CVPR),
Columbus, Ohio, USA.
He, K., Zhang, X., Ren, S., Sun, J., 2015. Deep Residual
Learning for Image Recognition, arXiv:1512.03385v1
[cs.CV]. Microsoft Research.
Howard, G.A., Zhu, M., Chen, B., Kalenichenko, D., Wang,
W., Weyand, T., Andreetto, M., Adam, H., 2017.
MobileNets: Efficient Convolutional Neural Networks
for Mobile Vision Applications, Google Inc,
arXiv:1704.04861v1 [cs.CV].
Redmon, J., Farhadi, A., 2018. YOLOv3: An Incremental
Improvement, University of Washington,
arXiv:1804.02767 [cs.CV].
Andriluka, M., Pishchulin, L., Gehler, P., Schiele, Bernt,
2014. 2D Human Pose Estimation: New Benchmark and
State of the Art Analysis, IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Chen, Xinghao, Wang, Guijin, Guo, Hengkai, Zhang,
Cairong, 2018. Pose Guided Structured Region
Ensemble Network for Cascaded Hand Pose Estimation.
Neurocomputing Journal.
Moon, G., Chang, J.Y., Lee, K.M., 2018. V2V-Posenet:
Voxel-To-Voxel Prediction Network for Accurate 3d
Hand and Human Pose Estimation from a Single Depth
Map, CVPR, arXiv:1711.07399[cs.CV].
Sridhar, S., Mueller, F., Zollhoefer, M., Casas, D., 2016.
Real-time Joint Tracking of Hand Manipulating an
Object from RGB-D Input. ECCV.
Regression-based 3D Hand Pose Estimation using Heatmaps
643
