
Bee2Fire: A Deep Learning Powered Forest Fire Detection System
Rui Valente de Almeida
1,2 a
, Fernando Crivellaro
1 b
, Maria Narciso
1 c
, Ana Isabel Sousa
1 d
and Pedro Vieira
1 e
1
Physics Department, FCT NOVA, Campus de Caparica, 2829-516 Caparica, Portugal
2
Compta, S.A., Alameda Fern
˜
ao Lopes 12, 10
th
floor, 1495-190 Alg
´
es, Portugal
Keywords:
Forest Fire Detection, Deep Learning, PyTorch, FastAI, IBM Watson.
Abstract:
Bee2Fire is a commercial system for forest fire detection, inheriting from the Forest Fire Finder System.
Designed in Portugal, it aims to address one of Southern Europe’s main concern, forest fires. It is a well
known fact that the sooner a wildfire is detected, the quicker it can be put out, which highlights the importance
of early detection. By scanning the landscape using regular cameras and Deep Artificial Neural Networks,
Bee2Fire searches for smoke columns above the horizon with a image classification approach. After these
networks were trained, the system was deployed in the field, obtaining a sensitivity score between 74% and
93%, a specificity of more than 99% and a precision of around 82%.
1 INTRODUCTION
Bee2Fire is the new commercial name of the Forest
Fire Finder (FFF) system, a forest fire detection sys-
tem developed in 2007 by NGNS-IS, Lda (Valente de
Almeida and Vieira, 2017). It was designed in a team
effort between FCT-NOVA and Compta, S.A., as a
stand-alone commercial AI-based forest fire detection
device as a complement to its already deployed spec-
troscopic capabilities, that used a chemical analysis
and traditional machine learning techniques (in par-
ticular Support Vector Machines) to infer on the pres-
ence of smoke in the atmosphere. This first paper rep-
resents an initial effort in developing this system.
In Portugal, southern of Europe and most other
warm weather regions on the globe, wildfires are one
of the most significant concerns, especially when con-
sidering global warming tendencies and what it en-
tails in terms of extreme phenomena. The stage in
which a forest fire is detected is a critical factor for
its extinction, and the sooner the better (Valente de
Almeida and Vieira, 2017). Bee2Fire aims to tackle
this issue by employing deep learning models for the
classification of images in which there may or may
a
https://orcid.org/0000-0002-2269-7094
b
https://orcid.org/0000-0002-7534-9149
c
https://orcid.org/0000-0001-5079-9381
d
https://orcid.org/0000-0003-2980-4742
e
https://orcid.org/0000-0002-3823-1184
not be a smoke plume in a remote area.
In this paper, we have used a portion of our image
dataset to train deep learning PyTorch (Paszke et al.,
2017) models using FastAI (Howard et al., 2018) as
a ”proxy platform”, which were complemented by
an IBM Watson Visual Recognition instance, trained
with the same dataset. In the field, our combined
classifier obtained a Sensitivity of between 74% and
93% and a Specificity of more than 99%, also scor-
ing around 82% on its Precision value. All in all, and
especially considering this was only a first approach,
our system was very effective in detecting daytime
smoke plumes. Future developments include increas-
ing the dataset, changing to an object detection strat-
egy and introducing reinforcement learning.
This paper is structured as follows: Section 2
briefly touches upon the theoretical concepts that
were used for the development of this project; Sec-
tion 3 discusses how these concepts were applied to
the particular problem we were trying to solve; Sec-
tion 4 presents the results that were obtained through
the discussed methods; and finally Section 5 ad-
dresses what could be concluded through our efforts
and most important future developments.
Valente de Almeida, R., Crivellaro, F., Narciso, M., Sousa, A. and Vieira, P.
Bee2Fire: A Deep Learning Powered Forest Fire Detection System.
DOI: 10.5220/0008966106030609
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 603-609
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
603

2 THEORETICAL BACKGROUND
2.1 Artificial Neural Networks
Bee2Fire is a Deep Learning (DL) enabled applica-
tion, which is comprised of an image classifier trained
to recognise a smoke column that might indicate a fire
event. DL is a branch of Machine Learning (ML),
powered by deep Artificial Neural Networks (ANN),
which are an ML concept developed during the twen-
tieth century and are loosely based on the way biolog-
ical neurons work (Rosenblatt, 1958). These math-
ematical structures are capable of learning to per-
form specific tasks by being exposed to a large num-
ber of examples. There are several types of ANN,
and their usage depends on the type of task at hand.
For instance, while Convolutional Neural Networks
(CNN - see (Lecun et al., 1998)) are widely used for
Computer Vision (CV) applications, Recurrent Neu-
ral Networks (RNN - see (Sherstinsky, 2018)) are
more used for language translation or tabular data
evaluation.
Input #1
Input #2
Input #3
Input #4
Output
Hidden
layer
Input
layer
Output
layer
Figure 1: An Artificial Neural Network with one hidden
layer.
ANN (see schematic representation in Figure 1)
are comprised of a series of neurons, connected in
layers through what are called edges (equivalent to
biological synapses). Edges have weights attached to
them, which determine how much they influence the
neurons activation and consequently how they influ-
ence the whole network. Neurons themselves hold a
real value (an activation), which is calculated by ap-
plying a non-linear function (the activation function)
to a linear operation calculated over the values of the
previous layer’s neurons, the edges and the bias for
each neuron. The bias is a numerical value that deter-
mines how easy (or difficult) for a neuron to be acti-
vated (Dreyfus, 1990; Goodfellow et al., 2016).
The process by which a Neural Network learns is
called training. The goal of this process is to minimise
a certain function, the cost function, which compares
the output of the network with the desired outcome
(i.e., the correct classification). Training an ANN
is an iterative process that encompasses two major
stages. The first stage is the feed forward stage. In
it, all the activation values are calculated using the
weights and biases, through the linear and non-linear
operations embedded into the network (in the very
first stage, weights are randomly initialised). The
second stage is called BackPropagation (BP) and up-
dates the weights in order to minimise the cost func-
tion by minimising its gradient (its partial derivatives
with respect to the weights and biases in the net-
work) (Nielsen, 2015).
Artificial Neural Networks play an important role
in modern day society. From the keyboard appli-
cation in our smartphone (Swiftkey, 2016) to the
self driving capabilities of a rising number of our
cars (Tesla, 2019), their application is almost ubiq-
uitous. This small introduction to ANN and how one
can work with them was not ever meant to be exhaus-
tive, but rather a starting point. More curious readers
are redirected to Michael Nielsen’s online interactive
book (Nielsen, 2015), for a much more in depth de-
scription.
2.2 Relevant Particularities of Deep
Learning
DL is nothing more than the field of study, within ma-
chine learning, that addresses development and appli-
cation of deep ANN, i.e., ANN with more than one
hidden layers. It would therefore be reasonable to
include the following discussion in the ANN discus-
sion. However, even if there is no formal distinction
between the two, the rate of development to which DL
has been subject to in the last decade is vertiginous.
By itself, this development would justify the division,
but there is more. There are a series of particular tech-
niques (coming from this prodigious growth of Deep
Learning) that were born (and only make sense) in
this context. In this subsection, we will approach the
several that were found useful in the implementation
of this project.
Although DL systems had been around for
decades, the term Deep Learning was popularised
from 2006 forward, when a group of researchers from
Canada and the USA figured that one could efficiently
train a deep model, something that was considered
impossible. Deep learning architectures and training
algorithms were at this time old creations, but they
have two important requirements, which were diffi-
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
604

cult to get in times prior to the 21
st
century (Goodfel-
low et al., 2016):
Computational Power One of the reasons why deep
neural networks have become so powerful in the
last years is the increase in their size, but this in-
troduces an amount of calculations that was sim-
ply impossible to manage before;
Data Deep Learning is able to ”learn” complex pat-
terns through the hierarchy of learned features
(line to curve to circle to wheel). For this, mod-
els need enormous amounts of data, and this was
something for which there was no capable infras-
tructure.
In CV, the most important year for DL has
been 2012. In this year, the AlexNet image clas-
sifier (Krizhevsky et al., 2012) shattered the previ-
ous record in the ImageNet competition (Deng et al.,
2009) and achieving errors of around 16%, when in
2011 the winning classifier had achieved 26%. This
was the first year a deep learning model had won this
competition, but it set the trend. In 2015, a mere 3
years after DL models had started leaving their mark
on the competition, ResNet (He et al., 2015) achieved
an error of 3.6%, 1.4% below human error. For the
first time a computer was scoring higher than a human
on a large scale image classification task (Goodfellow
et al., 2016).
Bee2Fire’s local detection engine is built upon a
ResNet18 (18 layer ResNet) model. Their introduc-
tion by He and his team marked the appearance of
one of the most important DL innovations, the con-
cept of residual learning. In their paper, the authors
have addressed the known problem of training error
degradation appearing for deeper models by using a
series of identity mapping shortcut connections skip-
ping over one or more layers, and adding this data
to the values that have undergone the linear and non-
linear transformations of the skipped layers (He et al.,
2015).
As stated above, the training process of this kind
of architecture demands access to enormous amounts
of data. Unfortunately, it is many times impossible to
compile such a dataset. One could expect this to be
an insurmountable obstacle for Deep Learning practi-
tioners, but indeed this is not the case. The hierarchic
nature of the learnt features in deep models allows an
immensely powerful ”trick” called Transfer Learning
(TL) (Tan et al., 2018), that leverages the fact that
whether one is trying to classify fish according to their
species or houses according to their style, the basic
image components are the same (lines, curves, cir-
cles, etc.). Therefore, if we train a network (e.g., a
ResNet18) on one of these huge datasets, such as Im-
ageNet’s, we can then adapt the last few layers of the
model and train them with our own, much smaller,
data. The process of working with pre-trained models
which are then adapted to the task at hand is usually
called fine-tuning.
Another particular method for working with deep
neural models is one called data augmentation. The
process is once again based on the learning capabil-
ities of this kind of ANN, and is extremely useful
for cases in which one can only access very small
datasets. The training process aims to make the neu-
ral model learn abstract features about the dataset, and
some of these abstract features are not related to the
way in which the data is presented. Therefore, the
same image can be fed multiple times into the dataset,
and one can introduce small variations of every image
(rotations, flips, noise, etc.). This can make a small
dataset workable from a DL perspective (Mikolajczyk
and Grochowski, 2018; Goodfellow et al., 2016).
Finally, we would like to discuss implementation
methods. Deep Learning and ANN in general can, on
a simple level, be easily implemented by hand, since
they can be reduced to a series of successive algebraic
operations. The problems come when one wants to
ensure a high level of performance, which is an abso-
lute requirement when one is dealing with deep mod-
els. The number of operations involved in training a
reasonably deep neural model goes easily into the tens
of millions (ResNet50 has 25.6 million parameters),
so every microsecond counts in terms of operational
computation time. Fortunately, the last few years
have seen the appearance of several software plat-
forms, mainly written in Python and leveraging GPU
capabilities, designed to perform deep model training
(and inference) with exceedingly high performance
levels. Some of the most famous are Google’s Ten-
sorflow (Abadi et al., 2016), Caffe (Jia et al., 2014) or
Facebook’s PyTorch (Paszke et al., 2017). Bee2Fire
is the result of the application of many of the theo-
retical concepts that we have presented in this section
through PyTorch via FastAI (Howard et al., 2018), a
popular library used for the automation of many of
PyTorch’s features. The next section details how this
was achieved.
3 METHODS
As stated in Section 1, this paper details the imple-
mentation for a first approach to forest fire detec-
tion using deep learning methods. As a result, the
number of images used is relatively small for this
kind of application, including only 2378 images, la-
belled as ’clean’ (1526) for clean skies, ’clouds’ (571)
for cloudy skies and ’smoke’ (281) for a smoke col-
Bee2Fire: A Deep Learning Powered Forest Fire Detection System
605
umn, acquired by several FFF systems deployed in
the North of Portugal. Since this device aimed to de-
tect smoke plumes above the horizon, it is only natu-
ral that this is reflected in our dataset, which consists
exclusively of images with a very clear sky line (ex-
cept in some cases of thick clouds). The problem we
are trying to solve with our Deep Learning approach
is one of single label classification (one image, one
category). Before training, images are manually sepa-
rated into three different folders, according to their la-
bel. Dataset division into training and validation sets
is performed at training time.
For training, inference and neural network han-
dling in general, we have used the FastAI li-
brary (Howard et al., 2018). FastAI is a python li-
brary developed with the purpose of automating many
of PyTorch’s (Paszke et al., 2017) parametrisation
requirements for neural network training. This au-
tomation results in a dramatic decrease in develop-
ment times without compromising accuracy or per-
formance in general, although resulting in a small and
acceptable loss of flexibility in comparison with pure
PyTorch.
For our application, we have trained a Resnet (He
et al., 2015) model with 18 layers, pre-trained on
the ImageNet (Deng et al., 2009) dataset. We used
transfer learning to complete the training and fine-
tune the network outputs to the three categories in
which we are interested, as illustrated by Figure 2.
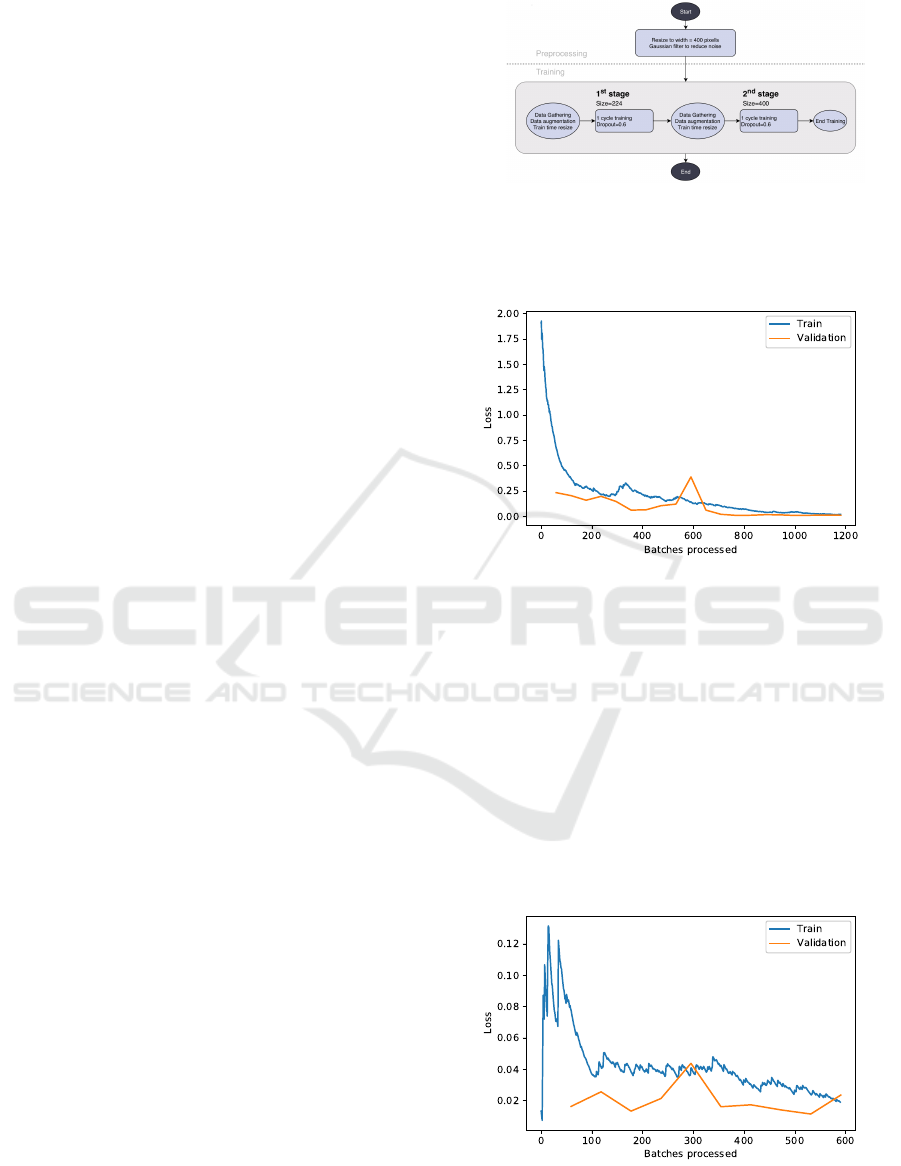
Pre-processing consists in a simple resizing and the
application of a Gaussian filter, which reduces high-
frequency noise. Training starts by loading the data
into a specific PyTorch structure called a databunch.
This step not only gathers all the data but also han-
dles dataset division and label separation. In addition,
it can also apply some data augmentation, which in
this case consisted only in small random transforms
like rotation, zoom and jitter, besides resizing each
image to a 224 pixels wide square. The final dataset
that goes into training has 1903 training images and
475 validation images. The second stage is the actual
training, which goes on for 20 epochs (training results
in Figure 3).
The second stage of the model consists in reload-
ing the data again, but this time resizing the image
to a 400 pixels wide square. This technique, of start-
ing the training with a smaller-sized image and then
progressing onto larger images is called Progressive
Resizing, and it is recommended by FastAI’s authors
for increasing the network’s performance (Howard
et al., 2018). This stage of the training went on for
10 epochs and results are visible in Figure 4.
As already stated, Bee2Fire combines two types
of classifiers for forest fire detection. The last few
Figure 2: Dataset training workflow. Note that the images
are re-dimensioned into two different pixel sizes immedi-
ately before training. This procedure was empirically found
to retrieve better results, and is recommended by FastAI au-
thors (Howard et al., 2018).
Figure 3: Loss plot for training the 224 pixel model after 20
training epochs.
paragraphs have been describing one of them, which
was built by us using a FastAI/PyTorch approach. The
other classifier was trained using IBM Watson’s Vi-
sual Recognition platform. For this classifier, and
since we do not know what are the preprocessing
steps applied by the platform itself, we chose not to
do anything with the images other than resizing them
to 640 pixels wide (for dataset size restrictions only),
respecting the original aspect ratio. While the chosen
dataset was precisely the same used to train our own
classifiers, this and uploading the data onto IBM’s
Figure 4: Loss plot for training the 400 pixel model after
10 epochs. Training loss has a clear downward trend, but
there is no improvement in the validation loss, indicating
the model is not learning with training.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
606
servers was the only thing we had to do, since every
other aspect of building the network is automatically
run by the platform.
4 RESULTS
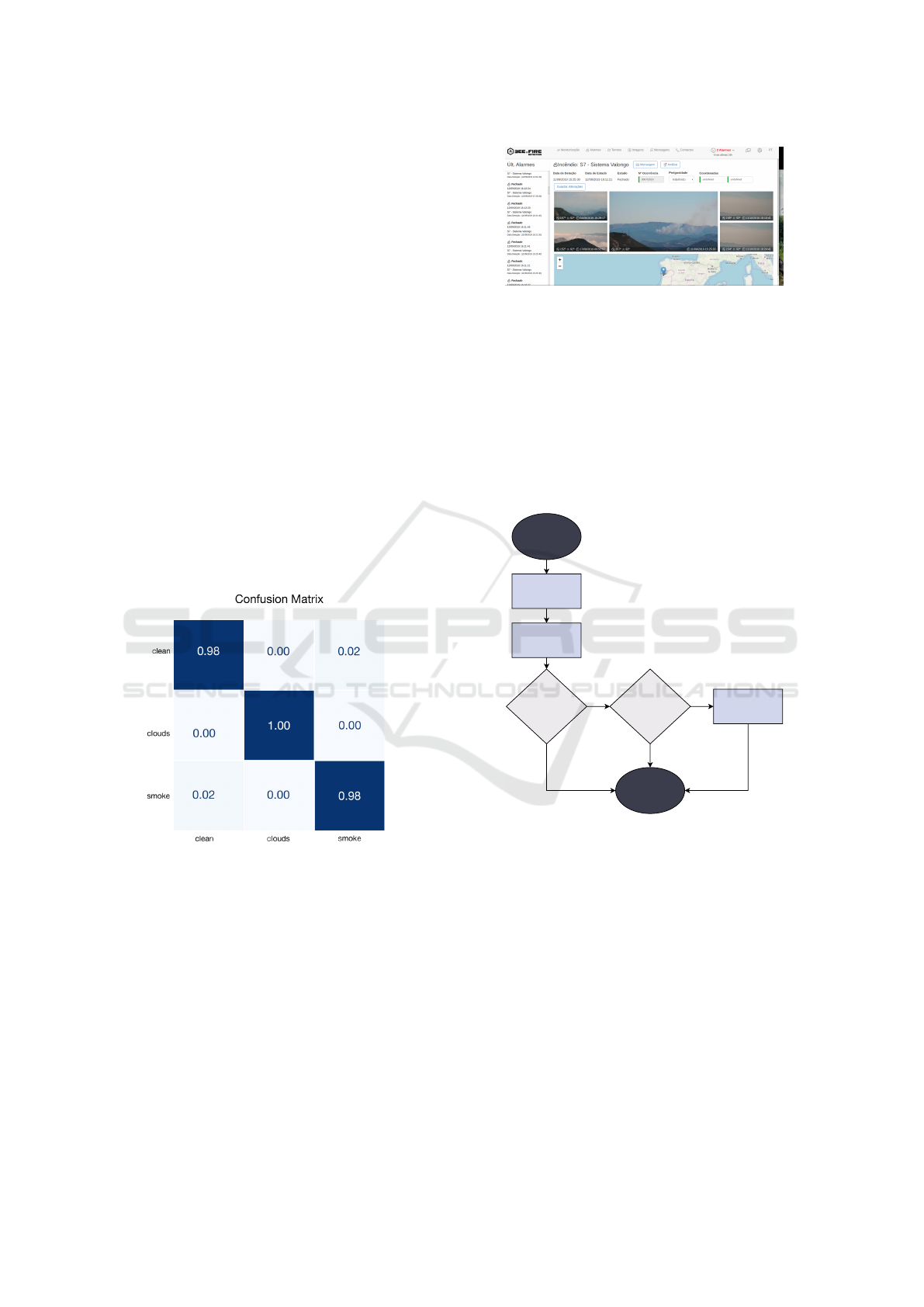
Figure 5 depicts the confusion matrix for the classifier
trained using the methods described in Section 3. As
one can see both from the matrix itself and also by the
loss plots of Figure 3, the chosen model has clearly
learned some pattern from the provided data.
What these results do not establish in any way is
that the trained model can be applied to any other real-
ity other than that in which the images were captured.
Since the goal of this study was to develop a first ap-
proach to a commercially viable solution for fire de-
tection using proprietary and publicly available clas-
sification engines, field testing was necessary. With
this in mind, the team assembled a prototype device
which was deployed in one of Compta’s commercial
partner’s facilities, in Valongo, northern Portugal (see
Figure 6 for a screenshot of the prototype’s interface).
Figure 5: Normalised confusion matrix for Bee2Fire’s clas-
sifier, trained using data from previous installations. The
matrix shows that the model performs very well with the
selected dataset, achieving at least 98% of accuracy for all
labels.
The prototype has been working since mid June
with little to no intervention on behalf of the project’s
team (with some minor maintenance work as an ex-
ception). The system’s mode of operation is similar to
the one detailed in FFF’s paper (Valente de Almeida
and Vieira, 2017), in which the camera is continu-
ously rotating, and an image is captured every 10 sec-
onds. Considering a period of 10 hours (this system
only works during the day, for now), this gives us a
Figure 6: Bee2Fire’s control interface. Although tempo-
rary, this is the basis of the commercial interface that will
be made available to clients in the near future.
total of 3600 classified images per day. These fig-
ures, and the fact that IBM’s visual recognition ser-
vice is paid on a per-call basis, dictate we only consult
the external service when our local classifier is ”con-
vinced” the image it is analysing is a smoke column.
The classification process is better explained through
a schematic representation, which the reader can find
in Figure 7.
Start
Image Acquisition
Preprocessing
PyTorch
Smoke > 0.8
IBM Watson
Smoke > 0.8
Alarm Generated
End
Figure 7: Schematic representation of the analysis process.
The system uses a normal surveillance camera to acquire
pictures of the landscape in which the device is deployed.
Each image is analysed by the PyTorch routine and then,
if the smoke probability is higher than a given threshold
(typically 0.8), also by the IBM Watson classifier. If the
threshold is surpassed in both classifiers, the system issues
an alarm.
Given multiple software changes, which are ex-
pected in a prototype product, the deployed system
has only been able to save alarms (images which trig-
ger a classification score of more than 0.8 for the
smoke category) since the beginning of September.
Let’s assume, for quantification purposes, the (par-
ticularly wildfire-ridden) week of September 9 - 15.
During this period, there were 19 wildfires, of which
14 generated one or more detection alarms in the first
Bee2Fire: A Deep Learning Powered Forest Fire Detection System
607

10 minutes. In addition, the system issued 3 false
alarms. These numbers allow us to calculate sensitiv-
ity, specificity and precision values for this test. Re-
sults are displayed in Table 1.
The obtained results must be carefully analysed,
in light of the intended specifications of this type of
device. It is this analysis that generates two differ-
ent sensitivity values (see Table 1). Direct account-
ing of detected and undetected events can lead one to
conclude the prototype has had a sensitivity of around
74% (during the testing period), which is quite unfair:
4 out of the 5 false negative predictions (system said
there was no smoke, but there was a smoke column)
are completely outside of what the device is supposed
to see (see Figure 8 as an example). If one takes this
into account, the sensitivity figure is rather more com-
fortable, of about 93%.
Figure 8: Example of an image depicting a smoke col-
umn that the classifier was not meant to detect, falling com-
pletely outside Bee2Fire’s distance specifications.
Now consider that no compensation is made, and
one evaluates the system’s performance solely on
whether it was or not able to ”see” a smoke column.
The low specificity value that our classifier has ob-
tained indicates that it cannot successfully identify
every positive occurrence. At first glance this might
seem very negative, but one must remember that it
is very rare for a smoke column to appear in only
one image in each scanning movement of the system.
Moreover, the low sensitivity is also offset by the fact
that a single fire can easily produce more than 15 pos-
itive images (although quantifying this is very diffi-
cult).
Table 1: Specificity and sensitivity values for Bee2Fire’s
classifier. Field test results.
Raw Sens. Adapted
Sens.
Specificity Precision
73.68% 93.33% 99.99% 82.35%
5 CONCLUSIONS
This study describes the development and implemen-
tation of a first approach to automatic fire detection
through Deep Learning methods. We have developed
our own classifier using open source methods (Py-
Torch / FastAI) and combined it with a publicly avail-
able classifier from IBM. Results were very positive,
and the system has achieved a sensitivity of between
74% and 93% for a specificity of more than 99% and
a precision of around 82%. Although the first value
may be considered on the low side, it is important
to have in mind that even if one does not take into
account the system’s specification requirements, the
problems that may come from this low value are off-
set by the nature of wildfires and the operation mode
of the system.
Regarding future developments, the most impor-
tant of these is the inclusion of a greater number of
images from our dataset into the training process.
Surely this will represent an increase in the classifier’s
performance and in its ability to generalise. Another
development that should be pursued is the conver-
sion of a classification system onto an object detection
model. Most DL classification tasks are applied to
images in which foreground/background distinction is
obvious. In our case, the smoke column that we aim
to detect can be in any place in the image, and since it
depicts a landscape, one cannot clearly speak of fore-
ground or background. An object detection model,
which can be based on the same ANN, could possibly
improve the ability for the system to understand if an
image contains a smoke plume. Finally, the last fu-
ture development that should be pursued is the inclu-
sion of a reinforcement learning platform, in which
human verification is entered automatically onto the
classifier, which would theoretically result in a con-
stantly improving (learning) model.
ACKNOWLEDGEMENTS
We would like to acknowledge the rest of Compta’s
team, without whom it would have been impossible to
deploy the system or to have an interface with which
to control it.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
608

REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen,
Z., Citro, C., Corrado, G. S., Davis, A., Dean, J.,
Devin, M., Ghemawat, S., Goodfellow, I., Harp, A.,
Irving, G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser,
L., Kudlur, M., Levenberg, J., Mane, D., Monga, R.,
Moore, S., Murray, D., Olah, C., Schuster, M., Shlens,
J., Steiner, B., Sutskever, I., Talwar, K., Tucker, P.,
Vanhoucke, V., Vasudevan, V., Viegas, F., Vinyals,
O., Warden, P., Wattenberg, M., Wicke, M., Yu, Y.,
and Zheng, X. (2016). TensorFlow: Large-Scale Ma-
chine Learning on Heterogeneous Distributed Sys-
tems. arXiv:1603.04467.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In Proceedings of the 2009 IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Dreyfus, S. E. (1990). Artificial neural networks, back
propagation, and the kelley-bryson gradient proce-
dure. Journal of Guidance, Control, and Dynamics,
13(5):926–928.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press.
He, K., Zhang, X., Ren, S., and Sun, J. (2015).
Deep Residual Learning for Image Recognition.
arXiv:1512.03385.
Howard, J. et al. (2018). fastai. https://github.com/fastai/
fastai.
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J.,
Girshick, R., Guadarrama, S., and Darrell, T. (2014).
Caffe: Convolutional Architecture for Fast Feature
Embedding. arXiv:1408.5093.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. In NIPS’12 Proceedings of the 25th In-
ternational Conference on Neural Information, pages
1097–1105.
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P.
(1998). Gradient-Based Learning Applied to Docu-
ment Recognition. proc. OF THE IEEE.
Mikolajczyk, A. and Grochowski, M. (2018). Data augmen-
tation for improving deep learning in image classifica-
tion problem. In 2018 International Interdisciplinary
PhD Workshop (IIPhDW), pages 117–122. IEEE.
Nielsen, M. A. (2015). Neural Networks and Deep Learn-
ing. Determination Press.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang,
E., DeVito, Z., Lin, Z., Desmaison, A., Antiga, L.,
and Lerer, A. (2017). Automatic Differentiation in
{PyTorch}. In NIPS Autodiff Workshop.
Rosenblatt, F. (1958). The perceptron: A probabilistic
model for information storage and organization in the
brain. Psychological Review, 65(6):386–408.
Sherstinsky, A. (2018). Fundamentals of Recurrent Neu-
ral Network (RNN) and Long Short-Term Memory
(LSTM) Network. arXiv:1808.03314.
Swiftkey (2016). Swiftkey debuts world’s first smartphone
keyboard powered by Neural Networks. https:
//blog.swiftkey.com/swiftkey-debuts-worlds-first-
smartphone-keyboard-powered-by-neural-networks.
Tan, C., Sun, F., Kong, T., Zhang, W., Yang, C., and Liu,
C. (2018). A Survey on Deep Transfer Learning.
arXiv:1808.01974.
Tesla (2019). Autopilot — Tesla. https://www.tesla.com/
pt{\ }PT/autopilot?redirect=no. Last accessed in Oc-
tober 14, 2019.
Valente de Almeida, R. and Vieira, P. (2017). Forest
Fire Finder – DOAS application to long-range forest
fire detection. Atmospheric Measurement Techniques,
10(6):2299–2311.
Bee2Fire: A Deep Learning Powered Forest Fire Detection System
609
