
Assessing the Usability of Different Virtual Reality Systems for
Firefighter Training
Fabrizio Corelli, Edoardo Battegazzorre, Francesco Strada, Andrea Bottino and Gian Paolo Cimellaro
Department of Control and Computer Engineering, Politecnico di Torino, Corso Duca degli Abruzzi 24, 10129 Torino, Italy
Keywords:
VR Training, Serious Games, Locomotion, Usability, User Study.
Abstract:
The use of Virtual Reality (VR) based learning environments for training firefighters is becoming more and
more common. The key advantages of these approaches is that they allow the development of experiential
learning environments, where trainees can be involved into and interact with complex emergency scenarios,
including those that cannot rely for the training on real world systems and environments due to costs or
security concerns. Despite that, current VR training systems are still affected by a number of weaknesses,
mainly related to usability and to the (limited) sense of presence conveyed by the virtual environment (VE),
which can negatively affect the expected learning outcomes. To this end, in order to gain further insight into
this problem, this work aims at assessing the usability of a firefighter training application deployed in three VR
systems and exploiting serious games in the educational approach. The VR systems under analysis provide
different levels of immersion and offer different approaches to manage interaction and locomotion inside
the VE. Experimental results, obtained through a user study, show differences among the three systems. In
particular, the devices and metaphors used to manage locomotion in VR seem to be the most critical parameters
with respect to usability and learners’ achievements.
1 INTRODUCTION
Current VR technologies are providing fire services
with new and compelling opportunities for transform-
ing the way firefighters are trained. According to (En-
gelbrecht et al., 2019), the key advantages of VR-
based firefighter training can be summarized as fol-
lows. First, firefighters need to learn how to address
critical situations where they can risk their life, and
VR provides a safe training environment where emer-
gencies can be simulated without putting trainees in
any real danger. Second, a VR application allows
trainees to experience different scenarios and emer-
gency procedures and the same application can be
used to train different categories of personnel. Third,
VR training can be also delivered remotely, thus help-
ing reduce costs and overall training times, and it
can even support collaborative activities, which are
beneficial for learning (Rojas-Drummond and Mer-
cer, 2003). Then, VR offers compelling experien-
tial learning environments that improve the learner’s
engagement and, ultimately, the learning outcomes.
Another advantage is that VR promotes repetition
(i.e., users can repeat the training session at their own
pace), which, in turns, improves content retention. Fi-
nally, training sessions can be logged and reviewed
in a debriefing sessions, where learners can critically
analyze what they did, get insights from their experi-
ence and analyze mistakes and explore alternative so-
lutions. Thus, debriefing sessions enhance the trans-
fer of knowledge and skills from virtual to real world,
and promote active learning (Garris et al., 2002).
The idea of using VR for firefighter training is
not a new concept. Several works have been pre-
sented in the literature. The VR systems used to
support the training sessions can vary from desktop
VR (Lee et al., 2010) to immersive systems, such
as those based on Head Mounted Displays (HMDs),
(Argasinski et al., 2018), (Tate et al., 1997) or on
CAVE environments (Backlund et al., 2007). Simu-
lations can also exploit dynamic and physics based
systems for recreating the correct behaviour of fire
and smoke (Cha et al., 2012). This is a crucial el-
ement in this context, especially when training tar-
gets emergency procedures inside buildings or tun-
nels. Some attempts have been even made to increase
the sensory spectrum of these simulations by imple-
menting odor (Cater, 1994) and heat radiance genera-
tors (Lee et al., 2010) to improve the sense of immer-
sion into a fiery environment. Given the relevance of
146
Corelli, F., Battegazzorre, E., Strada, F., Bottino, A. and Cimellaro, G.
Assessing the Usability of Different Virtual Reality Systems for Firefighter Training.
DOI: 10.5220/0008962401460153
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 2: HUCAPP, pages
146-153
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the decision-making aspect in the emergency manage-
ment, VR environment have been used as well to an-
alyze the relationships among firefighter experience
and the decision-making processes (Bayouth et al.,
2013).
Despite the many advantages, there are a number
of weaknesses that still affect current VR systems in
this specific context (Engelbrecht et al., 2019). One
relevant issue is that, despite the many efforts, actu-
ally there are no devices or interaction metaphors that
allow natural movements in large VR spaces, such as
those that are typical in firefighter training scenarios.
Moreover, some of these navigation approaches might
even induce cybersickness (Rebenitsch and Owen,
2016), with a negative effect on learning. A second
weakness is that technology still needs a leap forward
to maximize the sense of presence, which ultimately
is one of the main factors that help transfer the learned
skills from virtual space to real life. Finally, since
trainees’ acceptance of the technology is essential to
achieve the desired learning outcomes (Heldal et al.,
2016), the usability of the system and the overall user
experience should be maximized as well. However,
achieving this result is not trivial and involves a care-
ful selection of the interaction devices/metaphors and
an ad-hoc design of the application.
The goal of this work is to assess the usability of
three different VR systems (using different hardware
configurations) in a firefighter training context. In de-
tails, these systems are a desktop VR, and two im-
mersive environments, both leveraging an HMD for
visualization and hand-held controllers for interaction
but exploiting two different locomotion techniques:
a gaze-directed-steering metaphor (Bowman et al.,
1997) and an active re-positioning technique (Nils-
son et al., 2018) that allows trainees to naturally walk
through large VEs leveraging an omni-directional
treadmill. The training scenario used in the exper-
iments reproduces a fire-following-earthquake event
in a school. The educational path of the application
comprises a learning mode (where trainees are in-
structed step-by-step on the sequence of actions they
have to perform in the emergency procedure), and an
evaluation mode (which leverages a serious game to
assess the learned skills).
The three VR system have been compared by
means of an user-evaluation study that involved 45
volunteers divided in three separate groups (each us-
ing a different system). Experimental results showed
differences in the usability of the three system un-
der analysis, highlighting that the way locomotion is
managed is the most critical parameter that affects
both usability and users’ achievements in terms of
learning outcomes.
The rest of the paper is organized as follows. Sec-
tion 2 details the design of the training application and
the characteristics of the different VR systems under
analysis. Section 3 introduces the experimental pro-
tocol and Section 4 presents and discusses the results.
Finally, Section 5 draws the conclusions of this work.
2 APPLICATION AND SYSTEM
DESIGN
The firefighter training programs, irrespective of the
actual simulation scenario addressed, require to carry
out certain actions in a specific order. The comple-
tion of an action involves navigation in the VE and
interaction with virtual places, objects and avatars in-
side the environment. That said, the application de-
sign should be flexible enough to support different
scenarios and procedures. To this end, we modeled
action dependencies as a directed graph, where nodes
represent individual actions and edges correspond to
dependency requirements. The control of the node
execution flow leverage context awareness (i.e., envi-
ronment state, user’s interaction, internal and external
events). Composite nodes can be used to orchestrate
various sub-nodes (according to different algorithms,
such as sequential or parallel execution and loop man-
agement), thus allowing the definition of complex ac-
tion inter-dependencies.
As another constraint, the design should sup-
port the application deployment on different hardware
configurations. This has been done by leveraging de-
sign patterns specific for multi-platform applications
and exploiting the cross-platform features offered by
the Unity engine for the development.
2.1 Learning Path Design
The learning path of the application is organized in
two different parts: a learning and an evaluation ses-
sion. In the learning session, users are guided step-
by-step through the correct sequence of actions they
have to perform. For each individual action, visual
and audio clues instruct trainees on what they have to
do (and why) and on the sequence of steps required to
complete the activity. During task accomplishment,
users are supported by prompt and clear feedback that
inform them when an interaction is available (such as
adding a glow to interactable objects) and notify the
success/failure in performing an action.
The evaluation session is envisioned as a seri-
ous game, where users can freely perform any ac-
tion involved in the procedures learned in the previ-
ous phase, but they cannot benefit from any of the
Assessing the Usability of Different Virtual Reality Systems for Firefighter Training
147

cognitive aids available in the learning mode. The
game design leverages two main elements. A timer
enforces a time limit for completing a given task.
A score value translates the player’s success in the
game into a numerical representation, which is then
used as an automatic assessment of the learned skills.
The current score and timer values are displayed in
the VE and audio and visual cues highlight specific
events associated to them (e.g., timer expiration, new
points obtained). At the end of the game, players re-
ceive a summary report of their achievements and can
see their placement in the overall ranking. This fea-
ture aims at fostering competitive behaviors (i.e., by
challenging players to beat their colleagues’ scores),
which ultimately are beneficial to learning (Cagiltay
et al., 2015).
2.2 VR Environments
For the evaluation, the application was deployed in
the three types of VR environments depicted in Fig-
ure 1, whose main differences consist in the interac-
tion techniques and the level of immersion offered.
The first is a desktop VR system (referred to as
DVR in the following), where the VE is displayed
on a large monitor. The mouse movements control
camera orientation, while the player’s spatial move-
ments are handled with the keyboard arrow keys. The
behaviour associated to an interactable object can be
triggered by first selecting the object (pointing the
camera at it) and then pressing a mouse button.
On the contrary, the immersive VR system (IC)
uses an HMD for the visualization and hand-held con-
trollers for managing interaction and locomotion. The
head movements (captured by the HMD tracking sys-
tem) are used to control camera position and orien-
tation. As for the navigation, the active area of the
HMD trackers is not large enough to let user explore
the VR by physical walking. Therefore, locomo-
tion is managed by using the joystick included within
the controllers to translate the user in the current
gaze yaw direction. Interaction with objects leverages
the virtual hand metaphor (Poupyrev and Ichikawa,
1999), where the controller movements are mapped
into that of two virtual hands that players can use to
grab or activate interactable objects in the VE, thus
providing a natural and immediate interaction tool.
The last system (KAT) is similar to IC, since it
leverages HMD as display system and hand-held con-
trollers for interaction with objects, but uses a KAT-
Walk treadmill to manage locomotion. Treadmills are
“body-centric” re-positioning systems (Nilsson et al.,
2018) that translate physical gestures (e.g. walking
or running) into virtual movements. With the KAT-
Walk, the user is strapped into a harness, attached to
a supporting structure and slightly lifted over a con-
cave platform (Figure 1). The platform has a low fric-
tion surface that prevents the forces generated during
each step from physically moving forward the user.
The walking gestures are captured by two inertial sen-
sors that are placed on special overshoes, while a third
sensor, placed on the back of the harness, tracks the
movement direction and triggers the locomotion input
when the user tilts forward or backward.
Figure 1: VR environments considered in this study: desk-
top VR (DVR, left), immersive VR (IC, center) and tread-
mill based immersive VR (KAT, right).
3 EXPERIMENTS
The scenario selected for our experiments is a fire-
following-earthquake event in a school. In order to
make it as realistic as possible, the emergency sce-
nario is set into a real building (the Mascagni mid-
dle school of Melzo, Italy), which was recreated in
the VE importing its Building Information Model
(BIM). In the emergency scenario under analysis, a
short circuit caused by an earthquake generates a fire
inside a classroom, located in the first floor of the
school. Some students in the classroom are wounded
or trapped by fallen debris and, thus, they need to be
assisted and rescued, while the remaining students es-
cape from the classroom and evacuate through the ex-
ternal emergency stairs. The activities of the emer-
gency procedure trainees are supposed to learn, as
well as their completion times, have been defined with
the help of expert firefighter trainers according to the
characteristics of the building where the procedure
takes place. These activities are the following. The
firefighter should enter the main building, identify
the fire location by analyzing the smoke propagation
and the screams coming from the classroom. Since
the operator is likely to enter the school for the first
time, he/she must observe an evacuation plan chart
hanging on the wall in order to orient himself/herself
into the unfamiliar environment. Then, he/she must
find his/her way to the first floor (navigating corri-
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
148

Figure 2: Snapshot of the VR training scenario (from left to right): the main entrance of the school, the computer room where
the fire started, the evacuation meeting point seen from the emergency stairs and the fire-extinguishing step.
dors and using internal stairs). When the operator has
reached the classroom, he/she should first indicate to
the unharmed students the closest emergency exit so
that they can promptly evacuate the building. Then,
he/she must provide first aid to the injured students
and help them evacuate to a safe area. Subsequently,
the learner has to go back in the classroom and op-
erate a fire extinguisher (available in the building).
Once the fire is extinguished, the operator should re-
turn to the safe area where the evacuated students are
waiting for him. Some snapshot of the procedure ac-
tions can be seen in Figure 2. We underline that the
scenario taken in consideration allows us to stress the
interaction in general and the locomotion interfaces
in particular, since users had to (virtually) walk for
long distances and move inside narrow spaces (thus
requiring a fine-grained and detailed control of their
movements) in order to complete the assigned tasks.
In order to compare the different setups described
in Section 2.2, we performed a user study that in-
volved 45 volunteers (35 men and 10 women, aged
between 29 and 30) selected among students and
personnel of our University. Six of them are fre-
quent users of VR, 24 have had a previous experience
with VR and the remaining 15 had never experienced
VR before. Users were divided in three groups of
15 people, each experiencing the training application
through a different system. The experimental proto-
col applied was the following. First, since users are
likely to have low familiarity with the VR devices to
be used, the learning experience started with an in-
teraction training session in a test environment where
users could get acquainted with the interaction and lo-
comotion modalities available. This preliminary step
aimed at reducing barriers related to VR technologies
(especially for novices). When users felt confident
with the system, they were invited to repeat twice
the learning session and, finally, to perform twice the
evaluation session.
The assessment of the different systems encom-
passed the analysis of both the learning outcomes and
the usability of the system. In the human-computer
interaction (HCI) field, usability is defined as “the
extent to which a product can be used by specified
users to achieve specified goals with effectiveness, ef-
ficiency, and satisfaction in a specified context of use”
(Iso, 1998). Following this definition, we assessed
usability by measuring effectiveness in terms of cor-
rectness of the performed procedures, efficiency from
time on task and paths navigated inside the environ-
ment (where both effectiveness and efficiency met-
rics using objective in-game analytics), and satisfac-
tion through standardized questionnaires (i.e., lever-
aging subjective measurements) that users were re-
quired to fill after they completed the experience. The
proposed questionnaire is organized in different sec-
tions aimed to collect (i) information about usability
in broad terms (by considering the System Usability
Scale, SUS (Brooke, 2013), and the five attributes de-
fined by Nielsen (Nielsen, 1993), i.e., learnability, ef-
ficiency, memorability, possibility to recover from er-
rors and satisfaction), (ii) ergonomic aspects of the
proposed system (through statements derived from
the ISO 9241-400 standard (iso, 2007)) and (iii) de-
tailed usability information on the VR system (on the
basis of the VRUSE questionnaire (Kalawsky, 1999)).
All questionnaire items had to be scored by users ex-
pressing their agreement on a five point Lickert scale
(1, totally disagree; 5, totally agree).
As for the expected learning outcomes, since
trainees should learn how to execute the various steps
of the procedure in the correct order and within a pre-
defined time interval, their assessment was based on
the analysis of users’ behaviour in terms of comple-
tion time, correctness of the performed procedures
and learning progresses.
4 RESULTS AND DISCUSSION
In this section, we will first discuss the results con-
cerning usability of the VR systems under analysis
(Section 4.1. Then, we will assess the learning out-
comes achieved with these systems and with the help
of the serious game used during the evaluation phase.
In the following, both subjective and objective re-
sults obtained from the three volunteers groups were
analyzed with a One-Way ANOVA test with post-hoc
Tukey’s test to eventually identify groups showing
statistically significant differences.
Assessing the Usability of Different Virtual Reality Systems for Firefighter Training
149

4.1 Usability Assessment
A first indication of the usability of the three environ-
ments comes from the SUS normalized results in the
0–100 range (with odd items reverted). According to
(Brooke, 2013), a score above 68 shall be considered
as above average. As shown in Fig. 4, the KAT SUS
score is significantly lower than that of the other two
systems (DVR 86.0, IC 81.7, KAT 68.3, p = 0.00002)
and, thus, its usability can be considered as barely ac-
ceptable. Similar conclusions can be drawn by con-
sidering Nielsen’s attributes (second section of the
questionnaire). The three systems did not show any
significant difference in the learnability, memorabil-
ity and satisfaction attributes. However (Figure 3),
the KAT had significantly lower values than DVR and
IC (DVR 4.7, IC 4.5, KAT 4.1, p = 0.001) regard-
ing efficiency and was also perceived as having lower
possibilities to recover from errors than IC (DVR 3.9,
IC 4.4, KAT 3.7, p = 0.03).
These efficiency results are confirmed by the ob-
jective results collected. As a matter of fact, if we
consider the average distances travelled with the three
systems in the first and second run of the evaluation
session (Figure 6), we can observe a large difference
between the KAT and the other systems (DVR 262.2,
IC 241.5, KAT 284.4, p = 0.01 for the first run; DVR
254.8, IC 213.6, KAT 277.2, p = 0.001 for the second
run, where all measurements are expressed in meters).
Similar differences between KAT and DVR/IC are
obtained from the analysis of the percentage of ac-
tions completed in time (first run: DVR 95.0%, IC
90.08%, KAT 75.8%, p = 0.02; second run: DVR
97.5%, IC 96.4%, KAT 83.0%, p = 0.01; see Fig-
ure 6). This result highlights as well the negative ef-
fect of the lower KAT usability on the learning out-
comes. Trainees should not only learn to perform all
the actions required (and in the correct order), but they
should also learn to complete them in a suitable time,
since (for some actions) time is a critical parameter
(e.g., in our case, the room where fire started should
be reached as soon as possible in order to provide im-
mediate first-aid to the people in that place).
A possible explanation of this last result is pro-
vided by both direct observations and analysis of the
path traveled. Observations highlighted that KAT
users were less capable than others to exert a fine-
grained control of their movements. As a result, they
were not always in the condition of following an “op-
timal” path to reach their destination. These difficul-
ties in controlling small and detailed movements in
narrow spaces
1
are probably the main reason that led
1
In our simulation, this is, for instance, the situation
trainees are faced with when they have to operate in the
to increase the completion times of individual actions
and, thus, of the full procedure.
Another element that contributes to highlight the
navigation issues with KAT is the analysis of the trav-
elled paths, which are summarized in the heatmaps
shown in Figure 5. In each heatmap, colors on the
floor correspond to different traffic intensities (red
areas are the ones lots of people walked in, while
green regions had lower traffic). It can be seen that
user tracks for DVR and IC are much more compact
than the KAT’s one (despite few outliers that took
“bizarre” paths to reach their targets).
As for ergonomics (third section of the question-
naire), learners were asked to evaluate the interaction
with the VR systems according to the four statements
summarized in Figure 3. It can be seen that three out
of these four statements underline the low KAT er-
gonomics. In details, the locomotion device is more
cumbersome than the ones provided by DVR and IC
(DVR 1.4, IC 1.6, KAT 2.4, p = 0.005) and, to be op-
erated, it requires a higher mental effort than DVR
(DVR 1.7, IC 1.8, KAT 2.5, p = 0.03) and higher
physical efforts than both DVR and IC (DVR 1.1, IC
1.5, KAT 3.8, p = 5.53e − 13).
The fourth questionnaire section (VRUSE) under-
lines again the lower user appreciation received by
KAT. The VRUSE is divided into different subsec-
tions (related to the analysis of functionality, loco-
motion, interaction with objects, flexibility, error cor-
rection/handling, simulation fidelity, and sense of im-
mersion and presence). Each subsection is then con-
cluded by a closing summary question aimed at cap-
turing from users an overall evaluation on the aspects
investigated by the subsection. If we start analyzing
these closing questions, it can be observed that the an-
swers are similar for all the systems
2
, exception made
for the question corresponding to the locomotion sec-
tion, where the KAT had significant lower values than
DVR and IC (DVR 4.1, IC 3.9, KAT 3.2, p = 0.04).
Thus, in order to gain further understanding about
the issues encountered by users, we deemed interest-
ing to discuss in details the questions of this subsec-
tion and their answers (which are summarized, again,
in Figure 3). A first negative comment is that the KAT
classroom where the fire started, or when they have to climb
staircases.
2
As a note, the fact that the level of immersion and pres-
ence delivered by DVR was similar to the one offered by
IC and KAT was quite a surprising finding. A possible ex-
planation is that each user group experienced a single VR
system (thus, volunteers had no possibilities to make com-
parisons among them) and DVR group was experiencing
the VE through large monitors, which probably helped mit-
igate the “through the window” effect inherent in desktop
VR systems.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
150
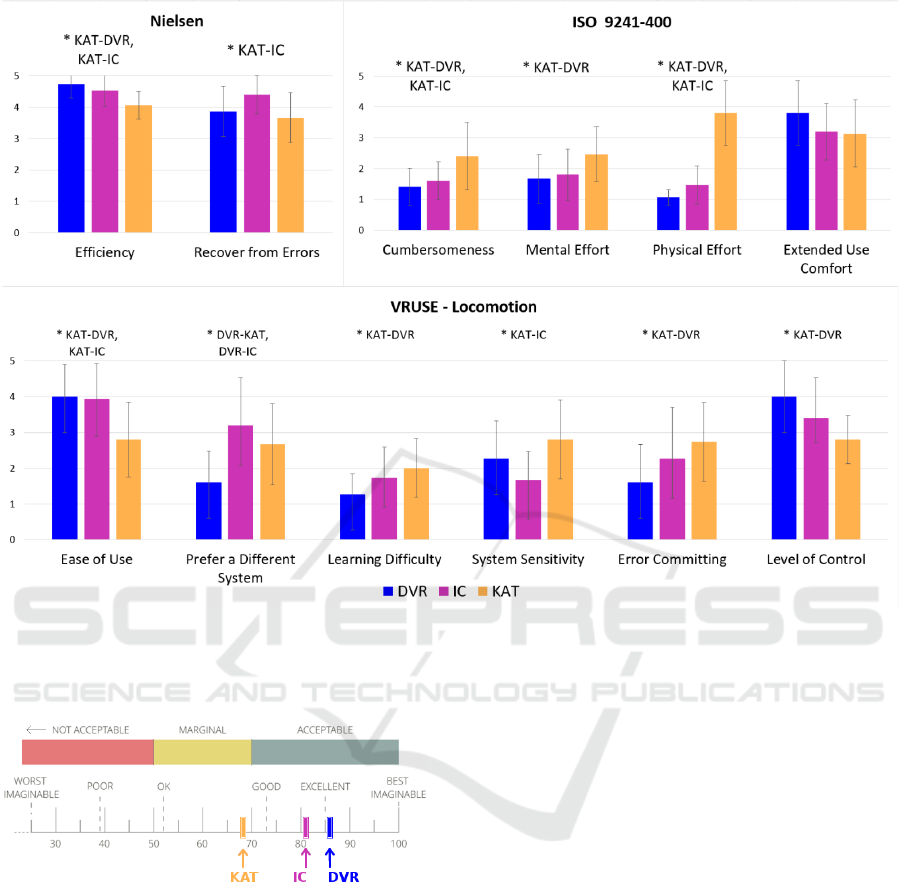
Figure 3: Excerpt of the subjective evaluation results. Top row: overall scores for the most significant Nielsen attributes (Left)
and the ISO 9241-400 properties (Right). Bottom row: usability factors regarding the locomotion system for which we found
a significant difference among systems (questions adopted from the VRUSE questionnaire). For all graphs, the “*” symbol
indicates a statistically significant difference and standard deviations are expressed through error bars.
Figure 4: SUS summary results. The scales displayed are
taken from (Brooke, 2013) and show that while IC and DVR
score as good/excellent, KAT can be only considered as
marginally acceptable.
ease of use is sensibly lower than that of the other two
locomotion approaches (DVR 4.0, IC 3.9, KAT 2.8,
p = 0.003). Both locomotion systems in immersive
environments (IC and KAT) are not highly appreci-
ated by their users, since they expressed their pref-
erence to use a different locomotion system with a
sensibly higher strength than that used by DVR users
(DVR 1.6, IC 3.2, KAT 2.7, p = 0.002). Then, learn-
ing how to use the KATWalk appears to be more dif-
ficult than the mouse and keyboard controls offered
by DVR (DVR 1.3, IC 1.7, KAT 2, p = 0.04) and
the KAT sensitivity is higher than that of IC (DVR
2.3, IC 1.7, KAT 2.8, p = 0.02). Finally, the proba-
bility of committing errors with KAT is higher than
with DVR (DVR 1.6, IC 2.3, KAT 2.7, p = 0.04) and
the level of control is lower with KAT than with DVR
(DVR 4.0, IC 3.4, KAT 2.8, p = 0.005). These level
of control values confirm the difficulties experienced
by KAT users in the (fine) control of the navigation.
4.2 Learning Outcomes
As we already observed, the VR application was ef-
fective in producing the expected learning outcomes.
The percentage of actions completed in the correct
order in the second evaluation run was 100% for all
users except one volunteer of the DVR group who
made a single mistake. The percentage of actions
completed in the correct order and in a timely fash-
ion (Figure 6, second run) was close to 100% for all
groups, except for KAT where this value was only
83% (and significantly different from that of the other
groups). This result, as we discussed before, was
mainly due to the issues with the locomotion device.
Assessing the Usability of Different Virtual Reality Systems for Firefighter Training
151
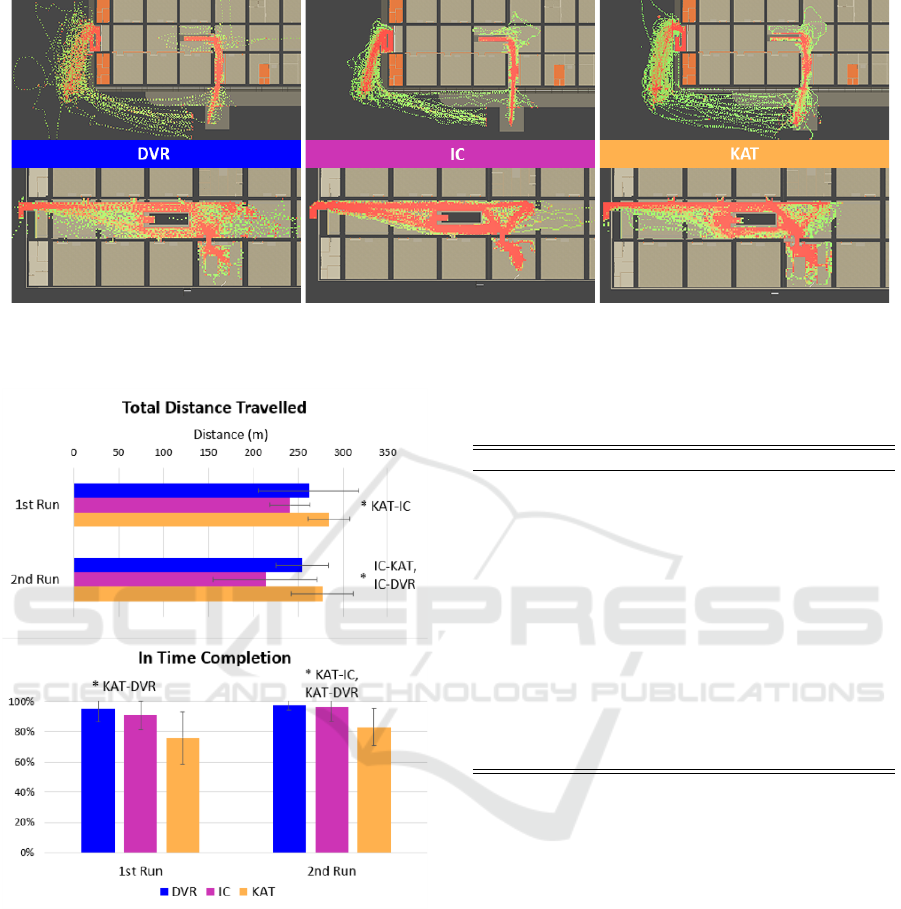
Figure 5: Heatmaps indicating users’ movements in the virtual environment. Images are color coded (green: less frequently
travelled paths, red: more frequent ones) and are divided for group (from left to right: DVR, IC and KAT) and floor (for each
group, top image shows the ground floor and bottom image the first floor).
Figure 6: Total distances traveled (up) and percentage of
activities completed in time (down) for the two runs of the
evaluation session.
Figure 6 allows to appreciate as well that, despite
small inter-session differences, all volunteer groups
benefits from repetition learning. The percentage of
correct action completion increased between the two
runs by 1.7% for both DVR and IC and 8.3% for KAT,
and that of correct and timely completion of 2.5% for
DVR, 5.6% for IC and 7.2% for KAT. Despite that, the
lack of follow-up studies does not allow to infer the
effects of repetition on users’ knowledge retention.
Finally, we can analyze the contribution provided
to the learning outcomes by game mechanics intro-
Table 1: Statements used to assess users’ appreciation of the
serious game (mean values and standard deviations).
Statement Score (SD)
I had fun using a game to learn intended content 4.56 (0.58)
I would have preferred an instructor-based learning
modality
2.22 (0.94)
I would have preferred a learning modality, based on
books, notes, slides, etc.
1.38 (0.74)
The designed game is a valid learning tool 4.42 (0.61)
The possibility to compare my score with other learn-
ers’ scores made me try to improve my results
4.40 (1.04)
I found the tool more a game than a system suitable for
training
2.78 (1.09)
Trying to improve my results in the game let me learn
intended content better
4.02 (1.02)
The presence of a timer stimulated me to quickly carry
out required actions
4.07 (1.06)
I found the timer a stressful element 1.78 (0.84)
duced in the evaluation session. This analysis is based
on the concluding section of the questionnaire, in
which we asked volunteers to express their level of
agreement with the 9 statements reported in Table 1.
We found that the results have no significant differ-
ences among the three groups and, thus, we reported
them as the cumulative averages among all users of
the three groups. These results can be summarized as
follows. The game features made the learning process
more fun and the approach proposed to deliver the
educational contents was appreciated by users. The
game elements introduced to solicit the competitive-
ness (the score and the leaderboard) were able to im-
prove the learners’ engagement and foster repetition,
and the timer was considered as an effective element
in encouraging users to complete the procedure ac-
tions in time. Finally, volunteers found that there
was a good balance between educational and enter-
tainment elements.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
152

5 CONCLUSIONS
In this work we presented and discussed a user study
aimed at assessing the usability, ergonomics and ef-
fectiveness (in terms of learning outcomes) of three
different VR systems used to deploy a firefighter
training application.
The major takeaways of this work are the follow-
ing. First, the VR training environment was capable
of achieving the expected learning outcomes, in terms
of both precision and timely completion of the emer-
gency procedures. Second, the introduction of the
serious game in the evaluation phase of the applica-
tion was appreciated by learners and was contributing
to support the educational path designed. Third, we
found different levels of usability (as well as different
levels of users’ appreciation) among the different VR
systems analyzed.
In particular, one of the most critical parameters
influencing the evaluations was the quality of the lo-
comotion management provided by the system. As
a matter of fact, locomotion is a relevant task in our
scenario. In order to complete the emergency proce-
dures, users have both to travel long distances and to
exert a fine control on their movements. With respect
to these requirements, when the interaction devices
(or the interaction metaphors) are not capable of sup-
porting the users, the results is a negative effect on
the trainee performances, in terms of both accuracy
and timing of the execution.
Future works will address the evaluation of alter-
native locomotion interfaces, simple to use and capa-
ble of guaranteeing a high level of immersion and an
adequate naturalness in the locomotion control. Then,
given the relevance of locomotion in other areas of ap-
plication, we are planning to extend the breadth of this
study beyond the firefighter training domain.
REFERENCES
(2007). ISO 9241-400 Ergonomics of human-system inter-
action – Part 400: Principles and requirements for
physical input devices.
Argasinski, J. K., Wegrzyn, P., and Strojny, P. (2018). Af-
fective vr serious game for firefighter training. In
Workshop on Affective Computing and Context Aware-
ness in Ambient Intelligence, volume 41, page 43.
Backlund, P., Engstrom, H., Hammar, C., Johannesson, M.,
and Lebram, M. (2007). Sidh–a game based firefighter
training simulation. In 2007 11th International Con-
ference Information Visualization (IV’07), pages 899–
907. IEEE.
Bayouth, S. T., Keren, N., Franke, W. D., and Godby, K.
(2013). Examining firefighter decision-making: how
experience influences speed in process and choice. In-
ternational Fire Service Journal of Leadership and
Management, 7:51.
Bowman, D. A., Koller, D., and Hodges, L. F. (1997).
Travel in immersive virtual environments: an evalu-
ation of viewpoint motion control techniques. In Pro-
ceedings of IEEE 1997 Annual International Sympo-
sium on Virtual Reality, pages 45–52.
Brooke, J. (2013). Sus: A retrospective. Journal of Usabil-
ity Studies, 8(2):29–40.
Cagiltay, N. E., Ozcelik, E., and Ozcelik, N. S. (2015). The
effect of competition on learning in games. Computers
& Education, 87:35 – 41.
Cater, J. P. (1994). Smell/taste: odors in reality. In Pro-
ceedings of IEEE International Conference on Sys-
tems, Man and Cybernetics, volume 2, pages 1781–
vol. IEEE.
Cha, M., Han, S., Lee, J., and Choi, B. (2012). A virtual
reality based fire training simulator integrated with fire
dynamics data. Fire Safety Journal, 50:12–24.
Engelbrecht, H., Lindeman, R., and Hoermann, S. (2019).
A swot analysis of the field of virtual reality for fire-
fighter training. Frontiers in Robotics and AI, 6:101.
Garris, R., Ahlers, R., and Driskell, J. E. (2002). Games,
motivation, and learning: A research and practice
model. Simulation & Gaming, 33(4):441–467.
Heldal, I., Wijkmark, H., and Pareto, L. (2016). Simulation
and serious games for firefighter training: Challenges
for effective use. NOKOBIT, 24:12.
Iso, W. (1998). 9241-11. ergonomic requirements for office
work with visual display terminals (vdts). The inter-
national organization for standardization, 45.
Kalawsky, R. S. (1999). Vruse – A computerised diagnostic
tool for usability evaluation of virtual/synthetic envi-
ronment systems. Applied Ergonomics, 30(1):11–25.
Lee, J., Cha, M., Choi, B., and Kim, T. (2010). A
team-based firefighter training platform using the vir-
tual environment. In Proceedings of the 9th ACM
SIGGRAPH Conference on Virtual-Reality Contin-
uum and its Applications in Industry, pages 299–302.
ACM.
Nielsen, J. (1993). Usability Engineering. Academic Press.
Nilsson, N. C., Serafin, S., Steinicke, F., and Nordahl, R.
(2018). Natural walking in virtual reality: A review.
Computers in Entertainment (CIE), 16(2):8.
Poupyrev, I. and Ichikawa, T. (1999). Manipulating objects
in virtual worlds: Categorization and empirical evalu-
ation of interaction techniques. Journal of Visual Lan-
guages & Computing, 10(1):19–35.
Rebenitsch, L. and Owen, C. (2016). Review on cybersick-
ness in applications and visual displays. Virtual Real-
ity, 20(2):101–125.
Rojas-Drummond, S. and Mercer, N. (2003). Scaffolding
the development of effective collaboration and learn-
ing. International journal of educational research,
39(1-2):99–111.
Tate, D. L., Sibert, L., and King, T. (1997). Using vir-
tual environments to train firefighters. IEEE Computer
Graphics and Applications, 17(6):23–29.
Assessing the Usability of Different Virtual Reality Systems for Firefighter Training
153
