
Image-quality Improvement of Omnidirectional Free-viewpoint
Images by Generative Adversarial Networks
Oto Takeuchi
1
, Hidehiko Shishido
1
, Yoshinari Kameda
1
, Hansung Kim
2
and Itaru Kitahara
1
1
University of Tsukuba, Tsukuba, Ibaraki, Japan
2
University of Surrey, Guildford, Surrey, U.K.
h.kim@surrey.ac.uk
Keywords: Free-viewpoint Image, Omnidirectional Image, Image-quality Improvement, Generative Adversarial
Networks.
Abstract: This paper proposes a method to improve the quality of omnidirectional free-viewpoint images using gener-
ative adversarial networks (GAN). By estimating the 3D information of the capturing space while integrating
the omnidirectional images taken from multiple viewpoints, it is possible to generate an arbitrary omnidirec-
tional appearance. However, the image quality of free-viewpoint images deteriorates due to artifacts caused
by 3D estimation errors and occlusion. We solve this problem by using GAN and, moreover, by focusing on
projective geometry during training, we further improve image quality by converting the omnidirectional
image into perspective-projection images.
1 INTRODUCTION
Image shooting with an omnidirectional camera (360-
camera) is an effective technique for observations
around an environment. In recent years, this tech-
nique has attracted more attention for its ability to
achieve immersive observations in combination with
a head-mounted display. In Google Street View
(Google, 2007), multi-directional observation with a
moving viewpoint is possible by properly choosing
omnidirectional images shot from multiple view-
points.
By applying a 3D estimation process such as
Structure from Motion (SfM) to the omnidirectional
multi-viewpoint images, it is possible to estimate the
position and rotation of the omnidirectional camera
and the 3D shape of the target space. We proposed the
Bullet-Time video generation method to smoothly
switch the viewpoint while gazing at the point to be
observed using the estimated information (Takeuchi
et al., 2018). In this method, omnidirectional obser-
vation is possible only at the captured viewpoint, not
at non-captured positions. When the interval between
the multi-viewpoint cameras becomes wider, the
smoothness of viewpoint movement is degraded.
Moreover, another serious problem is the complete
inability of the viewer to move the viewpoint from the
capturing viewpoint.
Free-viewpoint image generation with the aim of
reproducing an appearance from an arbitrary view-
point is one of the most active research fields in com-
puter vision (Agarwal et al., 2009; Kitahara et al.,
2004; Kanade et al., 1997; Shin et al., 2010; New-
combe et al., 2011; Orts-Escolano et al., 2016; Seitz
et al., 1996; Levoy et al., 1996; Tanimoto et al., 2012;
Matusik et al., 2000; Hedman et al., 2016), but arti-
facts due to 3D reconstruction errors (caused by an
error in correspondence search) and occlusion, which
degrade the image quality, are still important research
issues. It is possible to improve 3D reconstruction ac-
curacy by using devices that acquire depth infor-
mation, such as RGB-D cameras (Newcombe et al.,
2011; Orts-Escolano et al., 2016; Hedman et al.,
2016), but this reduces the simplicity of the capturing
system, making it more difficult for use in practical
applications. We attempt to solve this issue by using
an omnidirectional camera. Among multiple omnidi-
rectional images, there are many overlapping areas
due to the wide field of view. As a result, the same
region in the 3D space is observed from various view-
points, and thus the accuracy of the correspondence
search can be improved.
Research has been conducted to recover the de-
graded image quality by using an image reconstruc-
tion technique (Barnes et al., 2009). In recent years,
methods using deep learning have been proposed
Takeuchi, O., Shishido, H., Kameda, Y., Kim, H. and Kitahara, I.
Image-quality Improvement of Omnidirectional Free-viewpoint Images by Generative Adversarial Networks.
DOI: 10.5220/0008959802990306
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
299-306
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
299

(Pathak et al., 2016; Iizuka et al., 2017), and more
natural image-quality improvement has been
achieved. However, these methods are based on the
assumption that the region to be complemented is
known. On the other hand, in free-viewpoint video
generation, it is difficult to identify regions of low im-
age quality, since this depends on the capturing con-
dition. This makes it difficult to apply the conven-
tional image reconstruction technique to solving im-
age-quality degradation.
In this paper, we employ deep learning by gener-
ative adversarial networks (GAN) to learn the rela-
tionship in appearance between generated omnidirec-
tional free-viewpoint (OFV) images and captured im-
ages. By using the learning results (Generator of
GAN), a method to improve the image quality of
OFV images has been developed. It is well known
that the variation in training data affects the efficiency
of deep learning. The appearance of an omnidirec-
tional image is significantly distorted by a unique op-
tical system. Therefore, when the viewpoint of the
omnidirectional camera changes, the appearance of
the same region is also drastically changed. In other
words, the same region is observed with various ap-
pearances. We reduce changes in appearance due to
lens distortion to improve the learning efficiency of
deep learning. In particular, we divide an omnidirec-
tional image into multiple perspective projection im-
ages to reduce the variation in appearance.
2 RELATED WORKS
2.1 Display of Multi-viewpoint
Omnidirectional Images
In Google Street View (Google, 2007), it is possible
to observe the surrounding view by using omnidirec-
tional images. By switching omnidirectional images
shot from multiple viewpoints according to the view-
point movement specified by the observer, it is possi-
ble to grasp the situation in more detail while looking
around the scene. By combining image-blending pro-
cessing and image-shape transform, the observer gets
the sensation that he/she is moving around the scene.
We also estimate the position and rotation of the om-
nidirectional camera and the 3D shape of the captur-
ing space by applying 3D reconstruction processing
to the multi-viewpoint omnidirectional images. Using
the estimated 3D information, we developed the Bul-
let-Time video generation method to switch the view-
point while gazing at the point to be observed
(Takeuchi et al., 2018). However, the omnidirectional
image-switching method has the problem of allowing
the viewer to move only at the capturing position.
2.2 Free-viewpoint Images
There has been much research on free-viewpoint im-
ages. Model-based rendering (MBR) (Agarwal et al.,
2009; Kitahara et al., 2004; Kanade et al., 1997; Shin
et al., 2010; Newcombe et al., 2011; Orts-Escolano et
al., 2016) reproduces a view from an arbitrary view-
point using a 3D computer graphics (CG) model re-
constructed from multi-viewpoint images of the cap-
turing space. Image-based rendering (IBR) (Seitz et
al., 1996; Levoy et al., 1996; Tanimoto et al., 2012;
Matusik et al., 2000; Hedman et al., 2016) synthesizes
the appearance directly from the captured multiple
viewpoint images.
In MBR, the quality of the generated free-view-
point images depends on the accuracy of the recon-
structed 3D CG model. For this reason, when captur-
ing a complicated space where a 3D reconstruction
error is likely to occur, an artifact may occur in the
generated view. Furthermore, the occlusion inherent
in observations with multiple cameras makes it chal-
lenging to reconstruct an accurate 3D shape, thus de-
grading the quality of generated images (Shin et al.,
2010).
Since IBR does not explicitly reconstruct the 3D
shape but applies a simple shape, it is possible to gen-
erate free-viewpoint images without considering the
complexity of the capturing space. However, when
the applied shape of the capturing space is largely dif-
ferent from the actual shape, the appearance of the
generated view is significantly distorted by the image
fitting error. To reduce this distortion and generate an
acceptable view, it is necessary to increase the num-
ber of capturing cameras.
2.3 Image-quality Improvement
Research on image-quality improvement has been
conducted actively. There is a method that comple-
ments the appearance of the image by finding the cor-
responding image information using peripheral image
continuity (Barnes et al., 2009), and this method has
also been applied to complement free-viewpoint
video (Shishido et al., 2017). However, this method
cannot reconstruct information that is not observed in
the image. Various approaches of using convolutional
neural networks and GAN to reconstruct information
not included in the image have been proposed, but
these methods assume that the missing region is
known (Pathak et al., 2016; Iizuka et al., 2017). By
applying reconstruction utilizing GAN to transform
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
300
the entire image (Isola et al., 2017), we propose a
method to reproduce an appearance that is equivalent
to the captured image by compensating for the image-
quality degradation due to movement of the view-
point.
3 IMAGE-QUALITY
IMPROVEMENT OF OFV
IMAGE
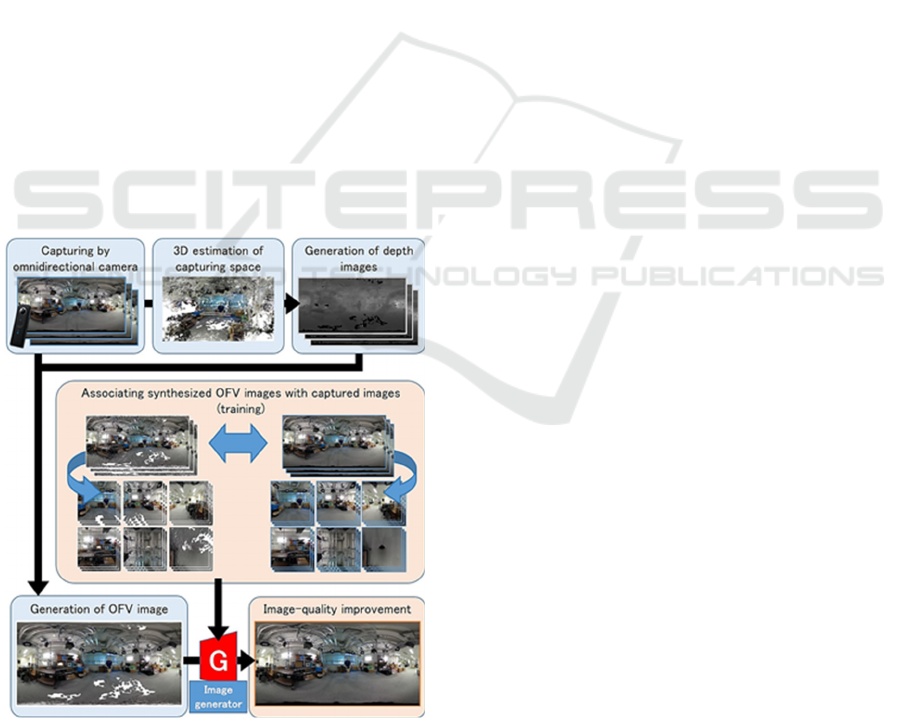
Figure 1 shows an overview of our proposed method.
By applying SfM to multi-viewpoint omnidirectional
images capturing the target space, the position and ro-
tation of each omnidirectional camera and the 3D
point cloud of the target space are estimated. Based
on the estimated camera parameters, the 3D point
cloud is projected onto each omnidirectional image
plane to generate sparse depth images. By interpolat-
ing the gap among the projected points, dense omni-
directional depth images are generated at each view-
point. It is possible to synthesize an omnidirectional
image at any viewpoint by using the omnidirectional
depth image and the captured omnidirectional image
as the texture. As a result, we obtain a dataset of ac-
tually captured omnidirectional images and synthe-
sized omnidirectional images at the same viewpoints.
Figure 1: Image-quality improvement of OFV images.
We apply the dataset to GAN, which learns a way to
generate the appearance of an image from the synthe-
sized image. By using the results of deep learning
(image generator) provided by GAN, the image-qual-
ity of the synthesized OFV image can be improved.
4 GENERATION METHOD FOR
OFV IMAGES
4.1 Capturing Multiple
Omnidirectional Images and
3D Estimation
Multiple omnidirectional images are captured at var-
ious viewpoints surrounding a target object. Due to
the active research and development on 3D infor-
mation estimation from multi-viewpoint images,
some excellent SfM libraries (Wu, 2011; Schönberger
et al., 2016; Sweeney et al., 2015) have become avail-
able. However, these libraries are usually based on
perspective projection, which is different from the
projective geometry of an omnidirectional image.
Therefore, in our method, we divide an omnidirec-
tional image into perspective images (i.e., virtually
setting cameras using perspective geometry) and ap-
ply an SfM library to each perspective projection im-
age captured by a virtual camera. As a result, the cam-
era parameters of the images and sparse 3D point
clouds are estimated. The position and orientation of
the omnidirectional camera can be calculated from
the estimated camera parameters of the virtual cam-
eras (Takeuchi et al., 2018). Based on the estimated
camera parameters and sparse 3D point cloud, multi-
view stereo processing (Seitz et al., 2006) is carried
out to obtain a dense 3D point cloud.
4.2 Generation of Omnidirectional
Depth Images
By calculating the distance from each viewpoint of
multiple omnidirectional cameras to the 3D point
cloud estimated in Section 4.1, we generate the sparse
omnidirectional depth image shown in Figure 2(a).
We calculate the color difference between the pro-
jected 3D point cloud and the pixel of the captured
image at the viewpoint where the depth information
is generated. The color difference is calculated as the
Euclidean distance between the two colors described
in the CIELAB color space. This color difference in-
creases when the 3D information of the point cloud is
estimated incorrectly. In order to reduce the error of
3D information, we apply threshold processing to the
color difference. When the color difference is 20.0 or
more, the depth value is not calculated.
Image-quality Improvement of Omnidirectional Free-viewpoint Images by Generative Adversarial Networks
301
Since we cannot estimate the depth value of the
pixels where the 3D point cloud is not projected, as
shown in Figure 2(a), there are vast missing regions
in a depth image. We interpolate these regions using
a cross bilateral filter (Chen et al., 2012). The cross
bilateral filter uses two different modal images (e.g.,
a color image and the depth image). It filters one of
the images based on the other one that has smaller ob-
servation noise. In our case, depth images having
much observation noise are filtered using captured
color images having smaller observation noise. The
following filter equations are applied:
∑
,
,
∈
∑
,
,
∈
,
,
‖
‖
,
,
,
(1)
where is the pixel coordinate of interest, is the
reference pixel coordinate, is the depth value, is
the luminance value, is the set of reference pixel
coordinates, and σ is a constant.
,
and
,
are weights for distance and color difference, respec-
tively. We calculate the depth value by weighting the
distance between the pixel position of interest and the
reference pixel position as well as the color difference
on the captured image. As a result, as shown in Figure
2(b), it is possible to interpolate the depth image
while maintaining the contour of the captured image.
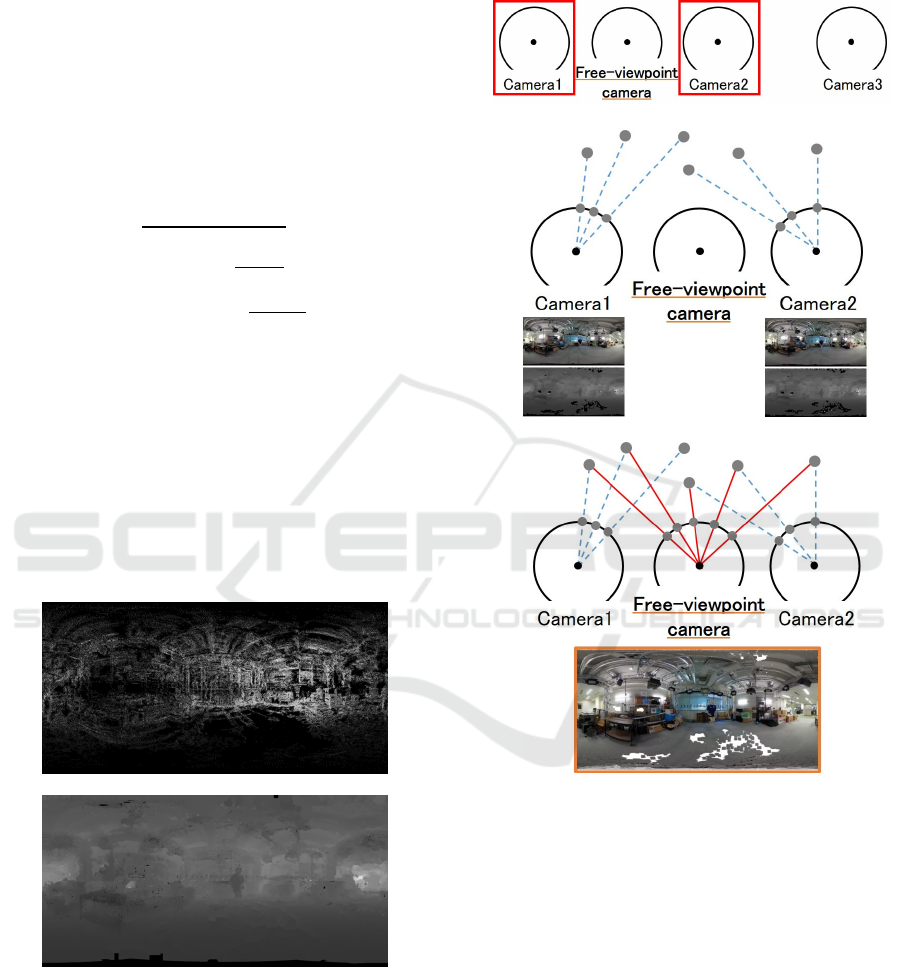
(a)
(b)
Figure 2: Generated omnidirectional depth image. (a): Be-
fore interpolation processing. (b): After interpolation pro-
cessing.
4.3 Generation of OFV Image
As shown in Figure 3, an OFV image at an arbitrary
viewpoint is generated from the omnidirectional im-
age captured in Section 4.1 and the omnidirectional
depth image created in Section 4.2.
(a)
(b)
(c)
Figure 3: Generation method for an OFV image. (a): Select
multi-view cameras to be used for free-viewpoint image.
(b): By referring to the depth information, every pixel value
(color information) of the captured multiple omnidirec-
tional images is projected onto a 3D space. (c): The OFV
image is generated by back-projecting these 3D point
clouds onto the omnidirectional image plane.
When the free viewpoint for generating a new om-
nidirectional image is determined, the distance from
the free viewpoint to each multi-view camera is cal-
culated. Then, a certain number of multi-view cam-
eras are selected in order from the closest one (Figure
3(a)). By referring to the depth information, every
pixel value (color information) of the captured multi-
ple omnidirectional images is projected onto a 3D
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
302
space to generate a dense 3D point cloud model (Fig-
ure 3(b)). The OFV image is generated by back-pro-
jecting these 3D point clouds onto the omnidirec-
tional image plane at the free-viewpoint. When dif-
ferent point clouds are projected on the same pixel of
a free-viewpoint image, the closer point cloud from
the free viewpoint is adopted to remove the hidden
surface (Figure 3(c)).
With the same processing, it is possible to gener-
ate a free-viewpoint image at the viewpoint where
multiple omnidirectional images are actually cap-
tured. We prepare a learning dataset (a pair of synthe-
sized free-viewpoint images and captured images) for
GAN used in image-quality improvement, which is
described in the next section.
5 IMAGE-QUALITY
IMPROVEMENT
Some artifacts are observed in the OFV images gen-
erated in Section 4.3. Typical causes of these artifacts
include 3D shape estimation errors and missing 3D
information due to occlusion. This section describes
how to reduce these problems using GAN. In this re-
search, we employee Pix2Pix (Isola et al., 2017) as a
way to implement GAN. Pix2Pix is a type of condi-
tional GAN that learns the correspondence between
two images of different styles, such as line-drawn im-
ages and photos or aerial photos and maps, and then
converts one to the other. In this research, Pix2Pix is
applied to image conversion between a free-view-
point image and a captured image to improve the
quality of free-viewpoint images.
Pix2Pix consists of two networks: an image gen-
erator and a discriminator. A pair of pre-conversion
and post-conversion images are prepared as training
data, the pre-conversion image is input to the image
generator, and either the image generated by the im-
age generator or the prepared post-conversion image
is input to the discriminator. The discriminator deter-
mines which image is input. Learning is done while
the images compete with each other, so the image
generator can deceive the discriminator, while the
discriminator can make an accurate decision. After
learning, image conversion is achieved by using an
image generator.
As the training data, the OFV image synthesized
at the capturing viewpoint in Section 4.3 is prepared
as the pre-conversion image, and the omnidirectional
image captured in Section 4.1 is prepared as the post-
conversion image. After the image generator is
trained using the training data, an OFV image at the
virtual viewpoint is given as an input to the learned
image generator to generate a highly realistic image
with reduced image-quality degradation.
We focus on the projective geometry of learning
images to achieve learning efficiency. The diversity
of appearance among learning samples increases,
making learning difficult because omnidirectional
images based on equirectangular projections cause a
significant change in appearance due to the move-
ment of the viewpoint based on their projection char-
acteristics. Therefore, we reduce the diversity of ap-
pearance by dividing the omnidirectional images into
multiple perspective projection images and then per-
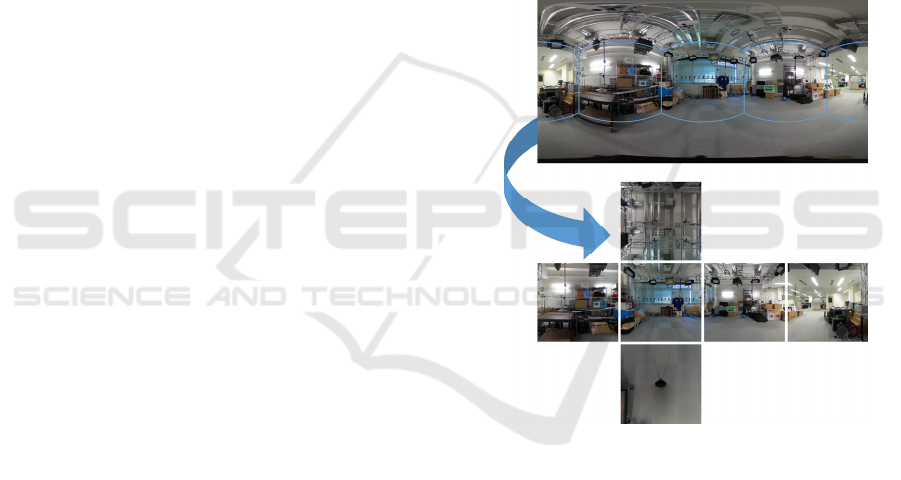
form efficient GAN learning. In this paper, as shown
in Figure 4, we adopt cube mapping to divide an om-
nidirectional image into six image planes and con-
struct an image generator using perspective projec-
tion images on each plane.
Figure 4: Division of an omnidirectional image into six im-
age planes by cube mapping.
6 EXPERIMENTS
6.1 Experimental Environment
We conducted demonstration experiments on the ef-
fect of improving the image quality of OFV images
by deep learning and on the impact of image division
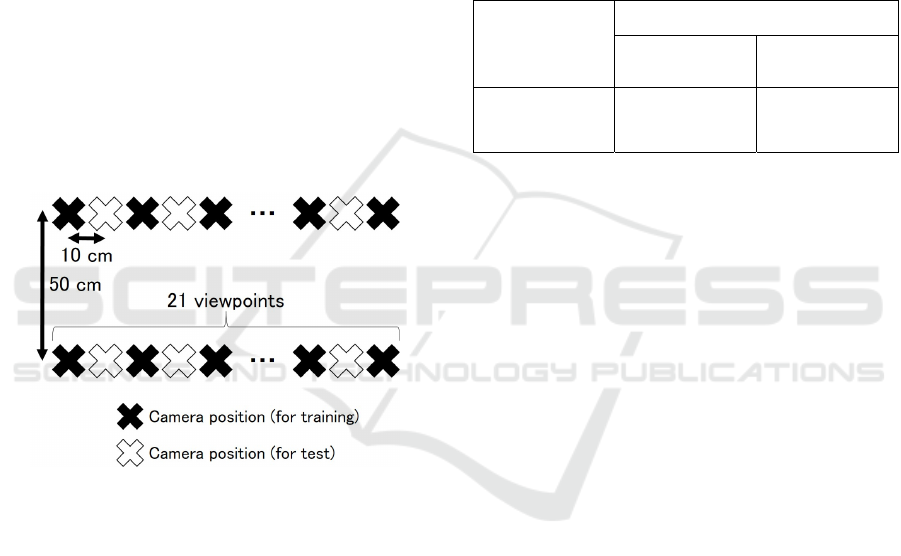
on learning efficiency. As shown in Figure 5, we in-
stalled a tripod with an omnidirectional camera
(RICOH THETA S) at 42 viewpoints in the indoor
environment (University of Tsukuba) and captured
multi-view omnidirectional images. For the pro-
cessing, we used a notebook PC with the following
specifications: CPU: Intel Core i7-7700HQ 2.8 GHz,
Image-quality Improvement of Omnidirectional Free-viewpoint Images by Generative Adversarial Networks
303
GPU: NVIDIA GeForce GTX 1060, Memory: 16 GB
RAM. SfM was executed using VisualSFM (Wu,
2011). We generated 42 OFV images at the capturing
viewpoints using the method described in Section 4.3.
Of these, we used 22 OFV images, as well as images
shot from the same viewpoint as these images, as the
Pix2Pix training data.
To verify the learning effect of GAN by the image
division described in the previous section, we trained
the image generator for the case of using an
equirectangular image as is and for the case of using
a perspective projection image divided by cube map-
ping. The OFV image based on equirectangular pro-
jection was 2,048 1,024 pixels, each perspective
projection image was 512512 pixels, and the num-
ber of learning steps was 1,000 epochs. For evalua-
tion, we input the 20 OFV images that were not used
for training to the image generator and observed the
generated images. Moreover, the image quality was
quantitatively evaluated using the peak signal-to-
noise ratio (PSNR), which is one of the image-quality
evaluation indexes.
Figure 5: Arrangement of omnidirectional cameras in cap-
turing experiments (viewed from above).
6.2 Results
Figure 6 compares examples of the images generated.
Figure 6(a) is an OFV image (before image-quality
improvement) made by the method described in Sec-
tion 4. Figures 6(b, c) are OFV images with improved
image quality: Figure 6(b) is the case where the di-
vided image is input, and Figure 6(c) is the case where
the omnidirectional image of the equirectangular pro-
jection is input. Figure 6(d) shows the captured image
(correct image). Comparing Figure 6(a) with (b, c),
we can confirm that the image generator constructed
by deep learning improves the missing regions in the
image. Comparing Figure 6(b) with (c), the former,
which uses the divided images as input, produces a
more precise image with fewer artifacts and less blur.
Using the average value of PSNR calculated from
OFV images at 20 viewpoints, we perform a quanti-
tative evaluation on the effect of image-quality im-
provement and the presence or absence of image di-
vision. Table 1 shows the evaluation results.
Table 1 shows that PSNR is improved and the im-
age generator constructed by deep learning improves
the image quality. In addition, the image-dividing
method produces a higher PSNR value than the non-
dividing method, thus confirming the effectiveness of
image division.
Table 1: Average PSNR with standard deviation in 20 view-
points images.
Before
image-quality
improvement
After image-quality improvement
With image
division
Without image
division
12.68 (±1.37) dB 27.39 (±0.45) dB 23.01 (±0.18) dB
7 CONCLUSIONS
In this paper, we proposed an image-quality improve-
ment method for OFV images using GAN. We recon-
structed the 3D information of the capturing space
from an omnidirectional multi-viewpoint image and
generated the OFV image after interpolation of the
depth information by image processing. By using
deep learning (GAN), we improved the image quality
of artifacts and the missing regions observed in con-
ventional free-viewpoint images. By focusing on the
projective geometry during training, we raised the
performance of image-quality improvement by con-
verting an omnidirectional image into perspective
projection images.
This work was partially supported by JSPS KA-
KENHI Grant Number 17H01772 and by JST
CREST Grant Number JPMJCR14E2, Japan.
REFERENCES
Google, 2007. Google Street View. See: https://www.
google.com/streetview/
Takeuchi, O., Shishido, H., Kameda, Y., Kim, H., and Kita-
hara, I., 2018. Generation Method for Immersive Bul-
let-Time Video Using an Omnidirectional Camera in
VR Platform. Proc. of the 2018 Workshop on Audio-
Visual Scene Understanding for Immersive Multime-
dia, pages 19-26.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
304
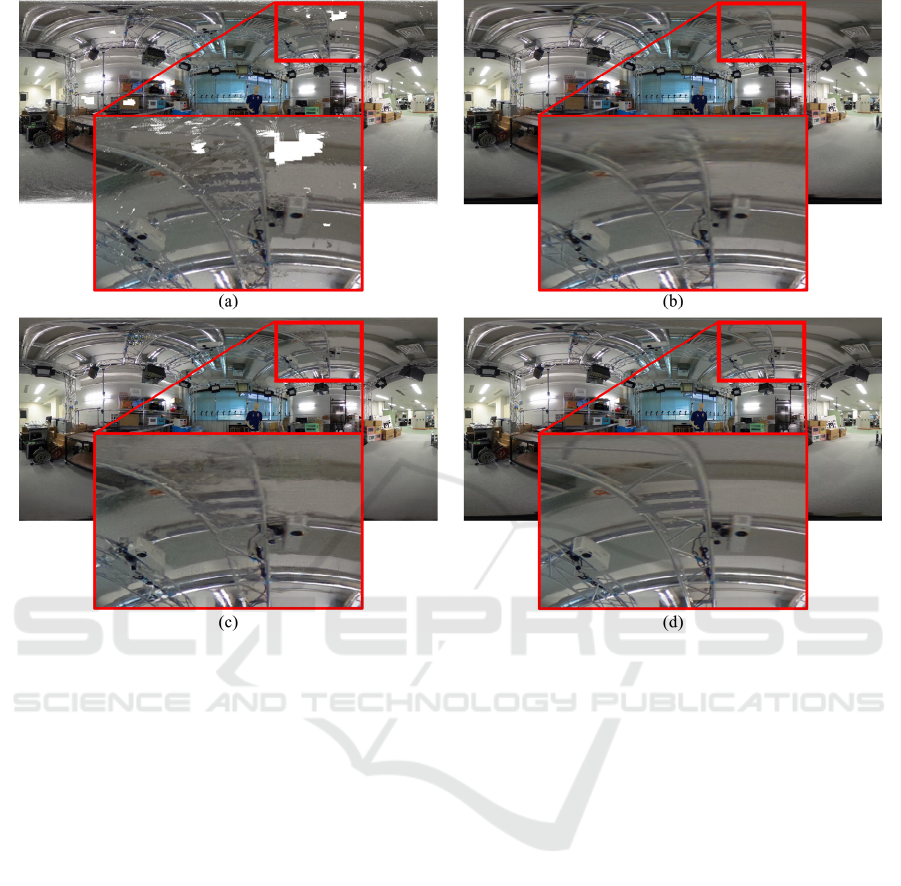
Figure 6: Comparison results (top) and enlarged views (bottom). (a): OFV image (no image-quality improvement). (b): Pro-
posed method using learning by image division (with image-quality improvement). (c): Proposed method using learning with
omnidirectional images (with image-quality improvement). (d): Correct image (captured image).
Agarwal, S., Snavely, N., Simon, I., Seitz, S. M., and
Szeliski, R., 2009. Building Rome in a Day. Interna-
tional Conference on Computer Vision, 8 pages.
Kitahara, I. and Ohta, Y., 2004. Scalable 3D Representation
for 3D Video in a Large-Scale Space. Presence: Tele-
operators and Virtual Environments, 13(2):164-177.
Kanade, T., Rander, P., and Narayanan, P. J., 1997. Virtu-
alized reality: Constructing virtual worlds from real
scenes. IEEE MultiMedia, 4(1):34–47.
Shin, T., Kasuya, N., Kitahara, I., Kameda, Y., and Ohta,
Y., 2010. A Comparison Between Two 3D Free-View-
point Generation Methods: Player-Billboard and 3D
Reconstruction. 3DTV Conference, 4 pages.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohli, P., Shotton, J., Hodges,
S., and Fitzgibbon, A., 2011. KinectFusion: Real-time
dense surface mapping and tracking. IEEE International
Symposium on Mixed and Augmented Reality, 10
pages.
Orts-Escolano, S., Rhemann, C., Fanello, S., Chang, W.,
Kowdle, A., Degtyarev, Y., Kim, D., Davidson, P. L.,
Khamis, S., Dou, M., Tankovich, V., Loop, C., Cai, Q.,
Chou, P., Mennicken, S., Valentin, J., Pradeep, V.,
Wang, S., Kang, S. B., Kohli, P., Lutchyn, Y., Keskin,
C., and Izadi, S., 2016. Holoportation: Virtual 3D Tel-
eportation in Real-time. Proc. of the 29th Annual Sym-
posium on User Interface Software and Technology,
pages 741-754.
Seitz, S. M., and Dyer, C. R., 1996. View Morphing. Proc.
of SIGGRAPH, pages 21-30.
Levoy, M. and Hanrahan, F., 1996. Light Field Rendering.
Proc. of SIGGRAPH, pages 31-42.
Tanimoto, M., 2012. FTV: Free-viewpoint television. Sig-
nal Processing: Image Communication, 27(6):555–570.
Matusik, W., Buehler, C., Raskar, R., Gortler, S. J., and
McMillan, L., 2000. Image-Based Visual Hulls. Proc.
of SIGGRAPH, pages 369-374.
Hedman, P., Ritschel, T., Drettakis, G., and Brostow, G.,
2016. Scalable Inside-out Image-based Rendering.
ACM Transactions on Graphics, 35(6):231:1–231:11.
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B., 2009. PatchMatch: A Randomized Correspond-
ence Algorithm for Structural Image Editing. ACM
Transactions on Graphics, 28(3):24:1–24:11.
Shishido, H., Yamanaka, K., Kameda, Y., and Kitahara, I.,
2017. Pseudo-Dolly-In Video Generation Combining
3D Modeling and Image Reconstruction. ISMAR 2017
Workshop on Highly Diverse Cameras and Displays for
Mixed and Augmented Reality, pages 327-333.
Image-quality Improvement of Omnidirectional Free-viewpoint Images by Generative Adversarial Networks
305

Pathak, D., Krahenbuhl, P., Donahue, J., Darrell, T., and
Efros, A. A., 2016. Context Encoders: Feature Learning
by Inpainting. IEEE Conference on Computer Vision
and Pattern Recognition, 9 pages.
Iizuka, S., Simo-Serra, E., and Ishikawa, H., 2017. Globally
and Locally Consistent Image Completion. Proc. SIG-
GRAPH, 36(4)21-30.
Isola, P., Zhu, J., Zhou, T., and Efros, A. A., 2017. Image-
to-Image Translation with Conditional Adversarial Net-
works. IEEE Conference on Computer Vision and Pat-
tern Recognition, 10 pages.
Wu, C., 2011. VisualSFM: A Visual Structure from Motion
System. See: http://ccwu.me/vsfm
Schönberger, J. L. and Frahm, J., 2016. Structure-from-Mo-
tion revisited. IEEE Conference on Computer Vision
and Pattern Recognition, 10 pages.
Sweeney, C., Höllerer, T. H., and Turk, M., 2015. Theia: A
Fast and Scalable Structure-from-Motion Library.
ACM International Conference on Multimedia, 4
pages.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R., 2006. A Comparison and Evaluation of
Multi-View Stereo Reconstruction Algorithms, IEEE
Conference on Computer Vision and Pattern Recogni-
tion, 8 pages.
Chen, L., Lin, H., and Li, S., 2012. Depth image enhance-
ment for Kinect using region growing and bilateral fil-
ter. Proc. of the 21st International Conference on Pat-
tern Recognition, 4 pages.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
306
