
Multi-stream Architecture with Symmetric Extended Visual Rhythms for
Deep Learning Human Action Recognition
Hemerson Tacon
1
, Andr
´
e de Souza Brito
1
, Hugo de Lima Chaves
1
, Marcelo Bernardes Vieira
1
,
Saulo Moraes Villela
1
, Helena de Almeida Maia
2
, Darwin Ttito Concha
2
and Helio Pedrini
2
1
Department of Computer Science, Federal University of Juiz de Fora (UFJF), Juiz de Fora, MG, Brazil
2
Institute of Computing, University of Campinas (UNICAMP), Campinas, SP, Brazil
{helena.maia, darwin.ttito}@liv.ic.unicamp.br, helio@ic.unicamp.br
Keywords:
Deep Learning, Human Action Recognition, Data Augmentation, Visual Rhythm, Video Analysis.
Abstract:
Despite the significant progress of Deep Learning models on the image classification task, it still needs en-
hancements for the Human Action Recognition task. In this work, we propose to extract horizontal and verti-
cal Visual Rhythms as well as their data augmentations as video features. The data augmentation is driven by
crops extracted from the symmetric extension of the time dimension, preserving the video frame rate, which
is essential to keep motion patterns. The crops provide a 2D representation of the video volume matching
the fixed input size of a 2D Convolutional Neural Network. In addition, multiple crops with stride guarantee
coverage of the entire video. We verified that the combination of horizontal and vertical directions leads do
better results than previous methods. A multi-stream strategy combining RGB and Optical Flow information
is modified to include the additional spatiotemporal streams: one for the horizontal Symmetrically Extended
Visual Rhythm (SEVR), and another for the vertical one. Results show that our method achieves accuracy
rates close to the state of the art on the challenging UCF101 and HMDB51 datasets. Furthermore, we assessed
the impact of data augmentations methods for Human Action Recognition and verified an increase of 10% for
the UCF101 dataset.
1 INTRODUCTION
In the last years, revolutionary advances were accom-
plished in the Computer Vision field. This progress
is due to the development of Deep Learning (DL)
methods, driven by the technological enhancements
of GPU. The major DL breakthrough was the Con-
volutional Neural Network (CNN) architecture and
many architectures for image classification were de-
veloped. All of them benefited from the emergence of
large image datasets, such as ImageNet (Deng et al.,
2009). A natural consequence of this success was
the exploitation of these achievements in the field of
video classification. In this domain, the problem of
Human Action Recognition (HAR) consists in recog-
nizing the main action being represented by a person
along a video. A solution to this problem is crucial
to automate many tasks and it has outstanding appli-
cations: video retrieval, intelligent surveillance and
autonomous driving (Kong and Fu, 2018).
In most datasets, the actions are simplistic, last-
ing for only a few seconds. However, due to scene
dynamics, the challenge of HAR relies on detect-
ing the action under different viewpoints, light condi-
tions, pose orientations and in spite of significant dif-
ferences in manner and speed that a video can present.
This work presents a method for HAR taking ad-
vantage of a DL architecture for classification. We
propose the usage of VR (Ngo et al., 1999; Concha
et al., 2018) obtained from two directions: horizon-
tal and vertical. The VR is a 2D video representa-
tion which combines 1D RGB information varying
over time. The specific feature used in this work to
classify videos is called Symmetric Extended Visual
Rhythm (SEVR). We propose to use horizontal and
vertical SEVRs in conjunction, instead of only using
the horizontal (Tacon et al., 2019). The two VRs are
combined to increase the performance. The results
corroborate for the usage of the combination of the
two directions instead of choosing the best direction
as proposed by (Concha et al., 2018).
Furthermore, we assess the employment of con-
ventional data augmentation for image classification
in the context of HAR with VR. We show that the
Tacon, H., Brito, A., Chaves, H., Vieira, M., Villela, S., Maia, H., Concha, D. and Pedrini, H.
Multi-stream Architecture with Symmetric Extended Visual Rhythms for Deep Learning Human Action Recognition.
DOI: 10.5220/0008958003510358
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
351-358
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
351

usage of classic data augmentation methods (zoom
and horizontal and vertical flips) together with spe-
cific data augmentation for video (symmetric exten-
sion) increase the UCF101 dataset accuracy by 10%.
Moreover, the VRs were combined with RGB images
and Optical Flow (OF) in a multi-stream architecture
to achieve competitive results.
The main contributions of this work are: the
extension of the concepts of the Weighted Visual
Rhythm (WVR) and Symmetrically Extended Visual
Rhythm (SEVR) to the vertical direction of the spa-
tial dimension of videos, the combination of vertical
and horizontal SEVR to other streams to form a four-
stream architecture, and an ablation study about the
impact of data augmentation methods for HAR. Ex-
periments were performed on two well-known chal-
lenging datasets, HMDB51 and UCF101, to evaluate
our method.
2 RELATED WORK
The recent approaches to learning automatic features
are mostly based on DL architectures. They can be
viewed as single or multi-stream models. Since the
success of the AlexNet (Krizhevsky et al., 2012) in
the image classification problem, CNNs have become
state of the art for this task. Since the 3D counterpart
of an image is a video, the emergence of methods us-
ing 3D CNNs to address the video classification prob-
lem was a natural consequence. However, the transi-
tion from 2D to 3D CNNs implies an exponential in-
crease of parameters, making the network more prone
to overfitting. A successful architecture based on a
3D-like method is the Two-Stream Inflated 3D Con-
vNet (I3D) (Carreira and Zisserman, 2017). The Two-
Stream I3D was built upon on the inflation of CNNs
by the expansion of kernels to a 3D space, making the
network capable of learning spatiotemporal features.
The main contribution of that work was the transfer
learning from pre-training on both ImageNet (Deng
et al., 2009) and a larger HAR dataset named Kinet-
ics.
Simonyan and Zisserman (Simonyan and Zisser-
man, 2014) proposed to exploit and merge multiple
features in a multi-stream method. They used RGB
and Optical Flow (OF). The RGB representation is
basically the usage of one colored frame to represent
the whole video sample. The OF is a method for es-
timating and quantifying a pixel motion between sub-
sequent frames (Zach et al., 2007). Essentially, the
OF is a 2D displacement vector of the apparent ve-
locities of brightness patterns in an image (Horn and
Schunck, 1981). As a major contribution, they pro-
posed to stack the OF from ten consecutive frames.
Since the horizontal and vertical components of the
OF vector fields were computed individually, the em-
ployed CNN architecture was modified to have an in-
put layer with 20 channels (224×224×20). The tem-
poral stream by itself outperformed the spatial one,
which conferred importance to the specific motion in-
formation.
Since the two-stream method achieved state of the
art results, recent works have proposed to explore 2D
representations of videos to use image-based CNNs
for the HAR problem. Wang et al. (Wang et al.,
2015b) used the ten frame approach to train a tempo-
ral network. They observed that the usage of the Ima-
geNet dataset (Deng et al., 2009) to pre-train the tem-
poral stream could increase its performance. Their
improved temporal stream is used in our work.
Derived from the OF definition, the Optical Flow
guided Feature (OFF), introduced by (Sun et al.,
2018), aimed to represent compactly the motion for
video action recognition. This method consisted of
applying the OF concepts to the difference of feature
maps of consecutive frames. One of the main pur-
poses of this work was to avoid the expensive run-
time in the classical OF computation. However, it
only achieved state of the art comparable results when
combined with a temporal stream based on the OF.
Multi-stream methods have the problem of not al-
lowing communication between the streams. This
lack of interaction hinders the models from learn-
ing spatiotemporal features (Kong and Fu, 2018).
Choutas et al. (Choutas et al., 2018) proposed a rep-
resentation, named Pose moTion (PoTion), to encode
motion of some video key points. In every frame, heat
maps for human joints were acquired by human pose
estimation. The heat maps were summed to obtain the
final PoTion representation, with the same dimension
of a frame. This representation is the input of a shal-
lower CNN that predicts the final class. The PoTion
representation alone was not able to achieve good re-
sults. However, combined with the Two-Stream I3D
ConvNet (Carreira and Zisserman, 2017), it slightly
improved the state of the art accuracy on the UCF101
dataset.
In the context of multi-stream video classifica-
tion, data augmentation is often applied to the spatial
stream inputs. At the training phase of the two-stream
method, a randomly selected frame was rescaled to
have the smallest dimension equals to 256. From this
frame, a sub-image matching the employed network
input dimension was randomly cropped and trans-
formed in several ways. Wang et al. (Wang et al.,
2015b) also proposed a multi-scale cropping method.
It consisted of resizing the frame to 256 × 340 and
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
352
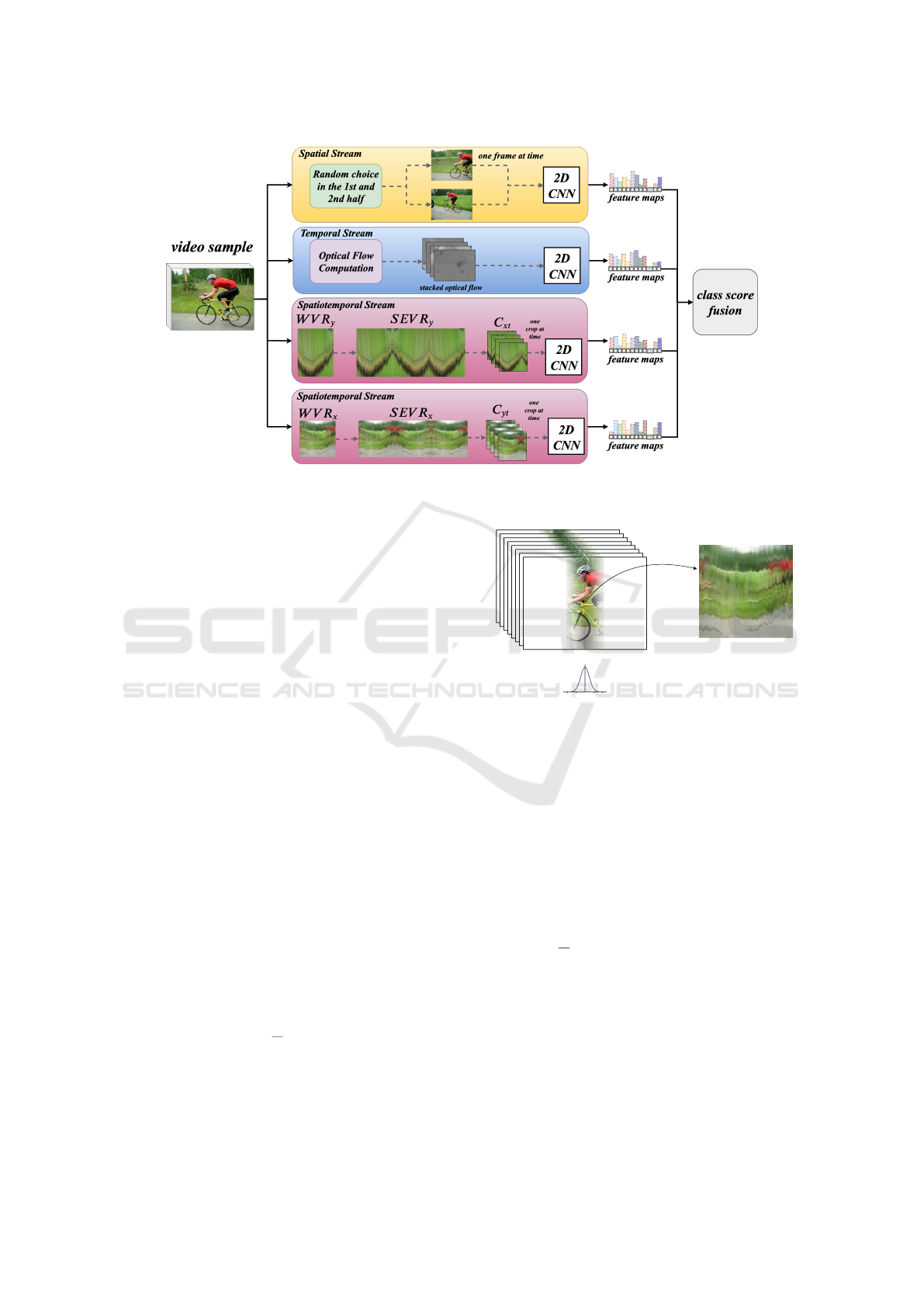
Figure 1: Final multi-stream architecture. The training of each stream is performed individually, and a weighted sum of the
feature maps determines a descriptor utilized in the final classification.
randomly sampling from specific positions. After
that, the crop was rescaled to match the network in-
put dimension. These data augmentation methods
showed to be helpful to avoid overfitting.
3 PROPOSED METHOD
The proposed method consists of combining two
VRs, extracted from distinct directions, with other
two streams that operate with RGB frames and OF.
To this end, we use the WVR and its augmentation
driven by the symmetric extension as new spatiotem-
poral streams. The streams are combined in a multi-
stream architecture illustrated in Figure 1, where the
WVR instances are depicted in purple.
3.1 Weighted Visual Rhythm
The horizontal Visual Rhythm WVR
y
is defined as:
WVR
y
=
h
∑
r=1
V R
P
r
· g(r − y,σ
y
)
·
"
h
∑
r=1
g(r − y,σ
y
)
#
−1
, (1)
where y is the reference row of the horizontal Visual
Rhythm and g(s,σ) = e
−
s
2
σ
2
is the weighting function
that decays as the video embedded planes goes far
from the reference row y.
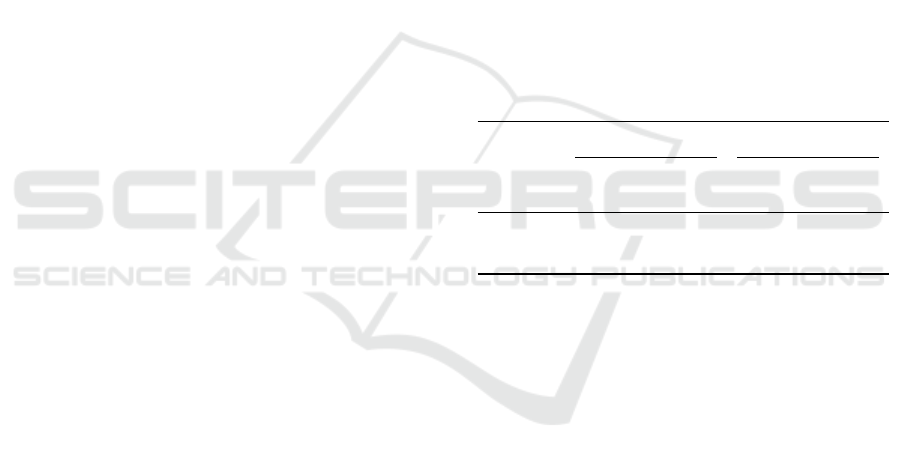
x
σ
x
Figure 2: Vertical WVR of a sample video of the biking
class from the UCF101 dataset: x is the middle column and
σ
x
is equal to 33.
The vertical Visual Rhythm WVR
x
can be defined
in the same way:
WVR
x
=
w
∑
c=1
V R
P
c
· g(c −x,σ
x
)
·
"
w
∑
c=1
g(c − x,σ
x
)
#
−1
, (2)
where x is the reference column of the vertical VR and
g(s,σ) = e
−
s
2
σ
2
is the weighting function that in this
case decays as the other VRs get farther from the ref-
erence column x. Thus, the WVRs used in the present
work are defined by two parameters: the reference
row y and standard deviation σ
y
, for the horizontal
version; and the reference column x and standard de-
viation σ
x
, for the vertical one. In practice, some sim-
plifications are adopted. An interval y ± d
y
is defined
from σ
y
such that outer rows have zero weight. Fur-
thermore, to make the parameter y invariant to video
Multi-stream Architecture with Symmetric Extended Visual Rhythms for Deep Learning Human Action Recognition
353

f 2f 3f 4f
h
CNN
0
s 2s 3s 4s 5s 6s
w
CNN
w
CNN
w
CNN
w
CNN
w
CNN
t
y
Figure 3: Extraction of five squared crops from the symmetric extensions of the vertical VR of a video of the biking class
from UCF101 dataset. The frame width is w = 320 pixels, the frame height is h = 240 pixels, and the corresponding video
length is f = 240 frames. The stride between crops is s = 150 pixels and the crop dimensions are w
CNN
= h
CNN
= 299. The
central area in Y is selected thus the rhythm will be stretched in Y to cover the crop dimensions.
height h, we define a factor α
y
such that y = α
y
· h.
Those same simplifications also apply for the vertical
VRs. An interval x ± d
x
is defined from σ
x
such that
outer columns have zero weight, and the α
x
factor is
defined as x = α
x
· w to make the x parameter invari-
ant to the video width w. Figure 2 depicts a video of
the biking class from the UCF101 dataset (240 frames
with 320 × 240 pixels), forming a vertical WVR of
240 × 240 pixels.
3.2 Symmetric Extension
The symmetric extension for the WVR
y
is defined as:
SEVR
y
(i,k) =
(
WVR
y
(i, f − m), for bk/ f c odd
WVR
y
(i,m +1), otherwise
(3)
where 1 ≤ i ≤ w, m is the remainder of the integer
division of k by f and k ∈ Z. Analogously, the sym-
metric extension of the WVR
x
as:
SEVR
x
(i,k) =
(
WVR
x
(i, f − m), for bk/ f c odd
WVR
x
(i,m +1), otherwise
(4)
where 1 ≤ i ≤ h, m is the remainder of the integer
division of k by f and k ∈ Z. Thus, the SEVR is
composed of several copies of the VR concatenated
several times along the temporal dimension with the
even occurrences being horizontally flipped. Figure
3 shows the vertical WVR of a video of the biking
class of UCF101 extended three times. The premise
is as follows: the majority of actions are constituted
of symmetrical gestures, e.g. typing, brushing teeth,
drumming, pull ups, playing guitar, etc. Thus, the ac-
tion performed backward in time also represents the
class and can be used to reinforce the CNN training.
The symmetric extension circumvents the temporal
limitation of videos and turns feasible the application
of some data augmentation methods.
3.2.1 Symmetric Extension with Fixed Stride
Crops
A crop C
xt
from the SEVR
y
with lower left coordi-
nates x and t is defined as:
C
xt
(a,b) = SEVR
y
(x + a,t + b), (5)
with x ≤ a < x + h
CNN
and t ≤ b < t + w
CNN
. And a
crop C
yt
from the vertical SEVR with lower left coor-
dinates y and t is defined as:
C
yt
(a,b) = SEVR
x
(y + a,t + b), (6)
with y ≤ a < y + h
CNN
and t ≤ b < t +w
CNN
. The VR
is extended symmetrically until n
c
crops are extracted
using a stride s, i.e., the first crop is taken at t = 0 and
all subsequent n
c
− 1 crops are taken s frames ahead
the previous one. The resulting set of crops for a fixed
column y is {C
yt
| t = js}, for j ∈ {0,1,...,n
c
− 1}.
There is no guarantee that a complete cycle of the
action is portrayed in a single crop since we do not
have any information about its commencement and
conclusion in a video sample. The probability of get-
ting at least one complete cycle of action increases
proportionally with the number of excerpted crops.
Besides that, the stride is helpful for this purpose.
This parameter is an attempt to adjust the temporal
limits of the crop, aiming to comprehend a full action
cycle.
3.3 Spatiotemporal Stream
Classification Protocol
For the spatiotemporal streams, depicted in purple in
Figure 1, a WVR is computed for each video, and
its data augmentation is driven by symmetric exten-
sion. Multiple crops with fixed stride are extracted
from the symmetric extension. At the inference time
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
354
and for video classification, all the augmented crops
are individually applied to the CNN, and their last
layer feature maps are extracted (just before softmax
classification) and averaged. We observed that fusing
the feature maps before the softmax normalization, as
performed by (Diba et al., 2017) and (Zhu et al., 2018)
achieves better results. A softmax classification layer
is applied to this average feature map. The final class
prediction is the averaged prediction of all crops.
We argue that this process might yield better class
predictions based on the assumption that multiple
crops taken at different time positions are represen-
tative of a distinct portion of the underlying action in
the video. In the training stage, however, each crop is
processed as a distinct sample and separately classi-
fied, i.e., the average is not taken into account.
3.4 Multi-stream Classification Protocol
Two instances of the spatiotemporal stream, one op-
erating on horizontal WVRs and another operating
on vertical WVRs, are used together with spatial and
temporal streams to form a multi-stream architec-
ture. In the overview of the proposed multi-stream
architecture, depicted in Figure 1, the spatiotemporal
streams are represented in purple, and the spatial and
temporal streams are represented in orange and blue,
respectively.
Each stream is trained individually, and all of
them use a version of the InceptionV3 network pre-
trained with ImageNet. The following details concern
to both UCF101 and HMDB51 datasets. We adopt
the improved spatial stream described by Concha et
al. (Concha et al., 2018) as well as the training and
testing protocols used in that work for both spatial and
temporal streams.
A fusion of the feature maps of each stream pro-
duces the final classification for the multi-stream ar-
chitecture. This fusion is a weighted sum of the fea-
ture maps. A grid search strategy is used to find out
the best weights. The feature maps used for this are
also extracted before the application of the softmax.
4 EXPERIMENTAL RESULTS
In this section, we evaluate the proposed methods.
To make our results more competitive and to show
the complementarity of the spatiotemporal streams,
we explore the multi-stream classification using every
possible combination between the employed streams:
horizontal WVR, vertical WVR, static RGB frames,
and Optical Flow. The proposed method was evalu-
ated through experiments performed on two challeng-
ing video action datasets: UCF101 and HMDB51.
The evaluation protocol used for both datasets is
the same. The average accuracy of the three train-
ing/test splits available for both datasets is reported as
the final result.
4.1 Data Augmentation Ablation Study
In this section, we present an experiment to evaluate
the real contribution of our data augmentation method
apart from Keras data augmentation methods. To this
end, we executed a baseline method using the resized
WVR and without Keras data augmentation (horizon-
tal flip, vertical flip, and zoom in the range of 0.8 to
1.2). Therefore, this is the scenario without any other
data augmentation methods. Table 1 shows the results
of these experiments. All results were obtained using
the horizontal version of the WVR. The SEVR sce-
narios used 4 crops with a fixed stride of 299.
Table 1: Comparison of accuracy rates (%) for UCF101 and
HMDB51 with (w/) and without (w/o) data augmentation
methods.
Scenarios
UCF101 (%) HMDB51 (%)
w/ Keras
DA
w/o Keras
DA
w/ Keras
DA
w/o Keras
DA
Baseline 65.19 57.64 34.46 28.93
SEVR 67.70 60.55 34.99 28.80
As expected, the usage of Keras data augmenta-
tion is significant, with an improvement of 7.35%
and 5.86%, in UCF101 and HMDB51, respectively.
The performance increase with our data augmenta-
tion methods (SEVR with crops) on UCF101 was
also relevant. In this dataset, the mean increase
was 2.71%. However, for HMDB51, our approach
showed a slight decrease without using Keras data
augmentation, 0.13%, and a small increase using both
data augmentation methods, 0.53%. Thus, our data
augmentation is at least complementary to the basic
ones for the more complex dataset. Overall, the usage
of both data augmentation methods for both datasets
leads to the performance increase, highlighting the
performance on UCF101, which increased over 10%.
4.2 Multi-stream Classification using
Visual Rhythms
The goal in this section is to show that our spa-
tiotemporal streams can complement a multi-stream
architecture to get more competitive accuracy rates.
The results of individual streams are shown in Table
Multi-stream Architecture with Symmetric Extended Visual Rhythms for Deep Learning Human Action Recognition
355

2. The first five approaches, OF, RGB*, Horizontal-
mean, Vertical-mean, and Adaptive Visual Rhythm
(AVR), are results from the work of Concha et
al. (Concha et al., 2018). It is worth remembering
that the use of OF as a temporal stream is not a con-
tribution of Concha et al. (Concha et al., 2018), but of
Simonyan and Zisserman (Simonyan and Zisserman,
2014). However, the result of such work is shown
since it comes from the use of the InceptionV3 net-
work in the temporal stream, which is not performed
in the original two-stream work (Simonyan and Zis-
serman, 2014). For the WVR
x
, the best obtained
accuracy for UCF101 was obtained with σ
x
= 33,
middle column (α
x
= 0.5), 4 crops and stride 299,
and for HMDB51 was using σ
x
= 65, middle col-
umn (α
x
= 0.5), 4 crops and stride 299. Similar to
other multi-stream networks (Simonyan and Zisser-
man, 2014; Wang et al., 2015b), the OF performs
better on both datasets. It is possible to notice that
the horizontal SEVR presented superior performance
if compared with the vertical one, independent of
the dataset, due to the prevalence of horizontal mo-
tion in the videos. The same outcome appeared in
the mean rhythm results. Excepting the SEVR
y
in
the HMDB51, the SEVR was superior to the mean
rhythm approach. Concerning the comparison be-
tween the SEVR
y
with the AVR, the results are di-
vided. Even using only horizontal motion informa-
tion, the SEVR
y
is better than AVR in the UCF101
scenario. However, the lack of vertical information
may be one of the factors that led to a worse result in
the HMDB51 dataset.
Table 2: Results of single-stream approaches.
Single streams
UCF101
(%)
HMDB51
(%)
Optical Flow (Concha et al., 2018) 86.95 59.91
RGB* images (Concha et al., 2018) 86.61 51.77
Horizontal-mean (Concha et al., 2018) 62.37 35.57
Vertical-mean (Concha et al., 2018) 53.87 30.12
AVR (Concha et al., 2018) 64.74 39.63
WVR
y
65.19 34.46
WVR
x
60.41 32.37
SEVR
y
68.01 35.29
SEVR
x
63.50 32.11
In order to our approach achieve more competi-
tive results, we proposed a final multi-stream archi-
tecture merging the SEVR
y
and SEVR
x
best setups,
with the RGB* and the OF streams. This final com-
bination is not enough to assess the complementarity
of the streams. To this end, we also conducted exper-
iments incrementally fusing the streams. The strat-
Table 3: Results of the combination of the streams.
Streams
UCF101
(%)
HMDB51
(%)
OF + RGB* 93.21 66.43
OF + SEVR
y
89.07 62.85
OF + SEVR
x
88.50 61.68
RGB* + SEVR
y
89.87 56.49
RGB* + SEVR
x
88.83 55.75
SEVR
y
+ SEVR
x
75.90 41.85
OF + RGB* + SEVR
y
93.70 67.15
OF + RGB* + SEVR
x
93.53 66.91
OF + SEVR
y
+ SEVR
x
89.72 63.20
RGB* + SEVR
y
+ SEVR
x
90.76 58.43
All streams 94.06 67.73
Simple mean of OF + RGB* 92.06 65.03
Simple mean of OF + RGB* + SEVR
y
91.01 60.98
Simple mean of all streams 90.17 58.45
egy used for merging the streams was the same de-
scribed by Concha et al. (Concha et al., 2018). Con-
cerning the combination of all streams, the best com-
bination found for UCF101 was 9.0, 7.0, 1.5 and 1.5,
respectively for OF, RGB*, SEVR
y
and SEVR
x
. And
the best combination found for HMDB51 was 7.5,
3.5, 1.0 and 0.5, respectively for OF, RGB*, SEVR
y
and SEVR
x
. We obtained 94.06% for UCF101 and
67.73% for HMDB51.
Table 3 shows the results of the incremental ex-
periments. It contains the
4
2
and
4
3
combinations
besides the combination of all streams. The com-
bination of the best single-streams (OF and RGB*)
generated the best two-stream combination, and the
merging of the best two-stream formed the best three-
stream combination with the third best single-stream
result (SEVR
y
). However, there is no guarantee
that the best results are also the most complemen-
tary among each other. This is verified, for the
UCF101, by the best two-streams containing SEVR
y
and SEVR
x
separately, which are formed with RGB*
instead of OF. So, the other streams are crucial to
complement the OF and to improve accuracy when
combined.
Table 3 also shows the simple mean for the best
combinations in each modality. In this case, we used
the feature maps after the softmax normalization be-
cause of the magnitude difference between streams.
The simple mean is the merge strategy adopted by
some works in the literature (Simonyan and Zisser-
man, 2014; Wang et al., 2015b). Although the im-
pact on two-stream is not harmful, the results tend to
be more negatively affected by the streams increase,
which is possibly a consequence of the accuracy gap
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
356
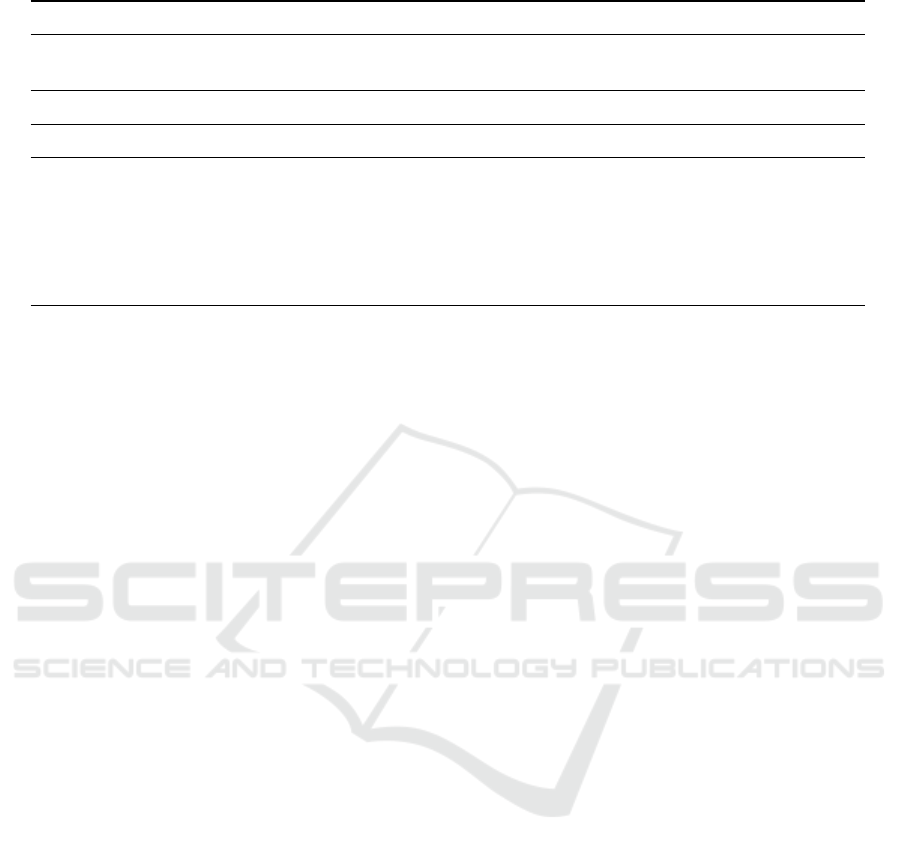
Table 4: Comparison of accuracy rates (%) for UCF101 and HMDB51 datasets.
Method Pre-training Dataset UCF101 (%) HMDB51 (%)
Two-Stream I3D (Carreira and Zisserman, 2017) ImageNet + Kinetics 98.0 80.7
I3D + PoTion (Choutas et al., 2018) ImageNet + Kinetics 98.2 80.9
TDD+IDT (Wang et al., 2015a) ImageNet 91.5 65.9
OFF (Sun et al., 2018) — 96.0 74.2
Two-Stream (Simonyan and Zisserman, 2014) ImageNet 88.0 59.4
Three-Stream TSN (Wang et al., 2016) ImageNet 94.2 69.4
Three-Stream (Wang et al., 2017) ImageNet 94.1 70.4
Multi-Stream + ResNet152 (Concha et al., 2018) ImageNet 94.3 68.3
Multi-Stream + InceptionV3 (Concha et al., 2018) ImageNet 93.7 69.9
Our method ImageNet 94.1 67.7
among them. The superior results of the weighted
sum in all cases demonstrate that the methods that
treat each stream differently lead to better results in
multi-stream architectures.
Furthermore, the two-stream combination of our
both spatiotemporal stream (SEVR
y
+ SEVR
x
line in
Table 3) surpassed the AVR (Table 2). Both meth-
ods combined data about horizontal and vertical mo-
tion. While this comparison is not fair, because the
two-stream had two types of data per sample and the
AVR counts with only one type per sample, it gives a
clue that combining vertical and horizontal motion is
more advantageous than using the information from
the most prominent movement direction.
Notice that the use of all four streams gives the
best result. This means that SEVR
y
and SEVR
x
pro-
vide worthy complementary information to reduce
classification confusion. A deeper study is needed to
find out which types of motion benefit from our pro-
posals.
Table 4 presents a comparison of our method com-
bining all stream features through multi-stream late
fusion and the other methods in the literature. Al-
though the SEVR
y
and SEVR
x
streams do not achieve
accuracy rates comparable to the state of the art indi-
vidually (Table 4), the improved multi-stream method
produced fairly competitive accuracy rates.
However, our method is overcome by some works.
The works pre-trained with the Kinetics dataset have
access to a volume of information that is crucial to
achieving higher accuracy on UCF101 and HMDB51.
However, a substantial amount of computational
power required for pre-training with Kinetics makes
its use impractical in most cases. Thus, we do not
consider a direct comparison with these approaches.
The merging with IDT features (Wang and Schmid,
2013) is another way to increase performance. DL
methods often benefit from exploring this specific
hand-crafted feature. In future works, we plan to
verify the complementarity of this feature with our
SEVR. Furthermore, the OFF approach stands out by
being a method that does not use Kinetics pre-training
and still achieves very close results to those that ex-
plore it.
Considering the VR approaches for the UCF101
dataset, our method outperforms the proposal of
(Concha et al., 2018), using the InceptionV3. Our ap-
proach is not better than the ResNet152 result for the
UCF101. The ResNet152 is deeper than the Incep-
tionV3, and this may be the reason for the difference
between outcomes. Considering that our approach
used four streams, the change to a deeper model cer-
tainly would increase significantly the computational
time required for training and testing. Further investi-
gation is needed to evaluate the deep-accuracy trade-
off on multi-stream architectures.
5 CONCLUSIONS
In this present work, we propose an approach to deal
with HAR in videos. It consists of the improve-
ment of a two-stream method reasoned on the in-
clusion of complementary information through two
spatiotemporal streams. The proposed spatiotempo-
ral streams are 2D CNNs operating on the SEVR. We
also evaluated the influence of the conventional data
augmentation for image classification in the Visual
Rhythms. It was verified that these data augmenta-
tion methods are very relevant for HAR using Visual
Rhythms and that the data augmentation provided by
the SEVR with fixed stride crops is also appropri-
ate, providing complementary information to improve
the classification. Concerning our multi-stream ar-
chitecture, the results endorsed the complementarity
between the spatial and temporal streams with our
spatiotemporal streams. However, more experiments
need to be carried out to evaluate the statistical signif-
Multi-stream Architecture with Symmetric Extended Visual Rhythms for Deep Learning Human Action Recognition
357

icance of our approach, including a per class analysis.
Our approach did not surpass some state-of-the-art
methods, mainly due to restricted information of the
used datasets. However, our results showed that our
data augmentation might improve HAR accuracy. To
achieve more competitive results, in future works, we
intend to explore the complementarity of our multi-
stream architecture with other features, such as IDT
(Wang et al., 2013) and I3D (Carreira and Zisserman,
2017). In addition, the SEVR principles could also be
employed to 3D CNNs for video classification prob-
lems.
ACKNOWLEDGEMENTS
Authors thank CAPES, FAPEMIG (grant CEX-
APQ-01744-15), FAPESP (grants #2017/09160-1 and
#2017/12646-3), CNPq (grant #305169/2015-7) for
the financial support, and NVIDIA Corporation for
the donation of two Titan Xp (GPU Grant Program).
REFERENCES
Carreira, J. and Zisserman, A. (2017). Quo Vadis, Action
Recognition? A New Model and the Kinetics Dataset.
In IEEE Conference on Computer Vision and Pattern
Recognition, pages 4724–4733.
Choutas, V., Weinzaepfel, P., Revaud, J., and Schmid, C.
(2018). Potion: Pose motion representation for action
recognition. In IEEE Conference on Computer Vision
and Pattern Recognition.
Concha, D. T., Maia, H. D. A., Pedrini, H., Tacon, H., Brito,
A. D. S., Chaves, H. D. L., and Vieira, M. B. (2018).
Multi-stream convolutional neural networks for action
recognition in video sequences based on adaptive vi-
sual rhythms. In IEEE International Conference on
Machine Learning and Applications, pages 473 – 480.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In IEEE Conference on Computer
Vision and Pattern Recognition.
Diba, A., Sharma, V., and Van Gool, L. (2017). Deep tem-
poral linear encoding networks. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
2329–2338.
Horn, B. K. and Schunck, B. G. (1981). Determining Opti-
cal Flow. Artificial intelligence, 17(1-3):185–203.
Kong, Y. and Fu, Y. (2018). Human action recog-
nition and prediction: A survey. arXiv preprint
arXiv:1806.11230.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet Classification with Deep Convolutional Neural
Networks. In Advances in Neural Information Pro-
cessing Systems, pages 1097–1105.
Ngo, C.-W., Pong, T.-C., and Chin, R. T. (1999). Detection
of Gradual Transitions through Temporal Slice Anal-
ysis. In IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, volume 1, pages
36–41.
Simonyan, K. and Zisserman, A. (2014). Two-Stream
Convolutional Networks for Action Recognition in
Videos. In Advances in Neural Information Process-
ing Systems, pages 568–576.
Sun, S., Kuang, Z., Sheng, L., Ouyang, W., and Zhang, W.
(2018). Optical flow guided feature: a fast and ro-
bust motion representation for video action recogni-
tion. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 1390–1399.
Tacon, H., Brito, A. S., Chaves, H. L., Vieira, M. B., Vil-
lela, S. M., de Almeida Maia, H., Concha, D. T., and
Pedrini, H. (2019). Human action recognition using
convolutional neural networks with symmetric time
extension of visual rhythms. In International Confer-
ence on Computational Science and Its Applications,
pages 351–366. Springer.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C.-L. (2013).
Dense trajectories and motion boundary descriptors
for action recognition. International Journal of Com-
puter Vision, 103(1):60–79.
Wang, H. and Schmid, C. (2013). Action Recognition with
Improved Trajectories. In IEEE International Confer-
ence on Computer Vision, pages 3551–3558.
Wang, H., Yang, Y., Yang, E., and Deng, C. (2017). Explor-
ing Hybrid Spatio-Temporal Convolutional Networks
for Human Action Recognition. Multimedia Tools and
Applications, 76(13):15065–15081.
Wang, L., Qiao, Y., and Tang, X. (2015a). Action recog-
nition with trajectory-pooled deep-convolutional de-
scriptors. In IEEE Conference on Computer Vision
and Pattern Recognition, pages 4305–4314.
Wang, L., Xiong, Y., Wang, Z., and Qiao, Y. (2015b). To-
wards Good Practices for very Deep Two-Stream Con-
vnets. arXiv preprint arXiv:1507.02159.
Wang, L., Xiong, Y., Wang, Z., Qiao, Y., Lin, D., Tang,
X., and Van Gool, L. (2016). Temporal Segment
Networks: Towards Good Practices for Deep Action
Recognition. In European Conference on Computer
Vision, pages 20–36. Springer.
Zach, C., Pock, T., and Bischof, H. (2007). A dual-
ity based approach for realtime tv-l 1 optical flow.
In Joint Pattern Recognition Symposium, pages 214–
223. Springer.
Zhu, J., Zhu, Z., and Zou, W. (2018). End-to-end video-
level representation learning for action recognition.
In 24th International Conference on Pattern Recog-
nition, pages 645–650.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
358
