
Quorum Sensing Re-evaluation Algorithm for N-Site Selection in
Autonomous Swarms
Shreeya Khurana
1
and Donald Sofge
2 a
1
Montgomery Blair High School, 51 University Blvd. East, Silver Spring, Maryland, U.S.A.
2
Distributed Autonomous Systems Group, Navy Center for Applied Research in Artificial Intelligence,
Naval Research Laboratory, Washington DC, U.S.A.
Keywords:
Quorum Sensing, Re-evaluation, Autonomous Swarms.
Abstract:
Flexible decision-making is a vital aspect of swarm behavior. Nature offers a level of uncertainty that could
force a swarm to reconsider a site previously abandoned. While efforts are being made to allow for flexible
decision-making in autonomous swarms, there is little literature in the area of re-evaluation functions as most
models utilize site abandonment functions. The research in this paper produces a re-evaluation algorithm
for discrete n-site selection by autonomous swarms, taking inspiration from prior work with quorum sensing
models and ant colony optimization algorithms. The algorithm’s success in re-evaluation trades off with
decision time, but increases the accuracy of decisions made.
1 INTRODUCTION
The applications of autonomous swarms have in-
creased tremendously in recent years with prefer-
able uses in unsafe or inaccessible locations (Tan
and Zheng, 2013). Efforts to develop more flexible
decision-making models in order to successfully and
efficiently select the best target or site within a search
space are being made. Several decision-making mod-
els that address value-sensitive site selections have
been proposed, but all these models abandon the sites
with lower values (Cody and Adams, 2017; Reina
et al., 2015). Therefore, there is a need for more flex-
ible decision-making models in autonomous swarms
that are capable of revisiting the sites that were previ-
ously abandoned.
The use of autonomous swarm systems in Human-
itarian Assistance and Disaster Response (HADR)
missions can significantly facilitate the relief opera-
tions conducted (Diamandis, 2019). As a result of
natural disasters, damage caused by flooding, or toxic
chemicals and radioactive materials, can cause a level
of uncertainty with regard to safety in certain areas.
Further, the sustainability of buildings used for tem-
porary shelters may change rapidly as a result of dam-
age. Additionally, overcrowding of shelters can cause
significant problems. In 2017 Hurricane Maria dev-
a
https://orcid.org/0000-0003-0153-3581
astated Puerto Rico, resulting in a significant power
outage and lack of drinking water on the island. Med-
ical centers were overcrowded and had limited capa-
bilities to respond as a result of the shortages in sup-
plies and personnel at the shelters. When it is the
job of the swarm system to locate supportable shel-
ters for those in need, the system needs to implement
proper decision-making to account for the level of un-
certainty in the community environment during such
natural disasters.
Therefore, an algorithm in which the swarm sys-
tem makes re-evaluations of past quorum decisions is
needed to address the uncertainties and potential in-
stability of a shelter location. Rather than discarding
visited sites that have been deemed unsuitable, as in
most swarming decision-making models that imple-
ment site abandonment, an algorithm that keeps all
of the sites in its memory is needed. Thus, when
a selected shelter has deteriorated, the agents of the
swarm system should be able to re-evaluate the re-
maining sites to select the next best site.
This research paper proposes a discrete n-site se-
lection model that allows swarms to re-evaluate past
quorum decisions. The proposed model allows swarm
agents to explore a defined search space, and com-
municate with each other about sites in the proxim-
ity. This communication then allows the agents to
come to a consensus about the best site for reloca-
tion. The model takes inspiration from the decision-
Khurana, S. and Sofge, D.
Quorum Sensing Re-evaluation Algorithm for N-Site Selection in Autonomous Swarms.
DOI: 10.5220/0008957801930198
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 193-198
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
193
making mechanisms of ant swarms as well as the
quorum-sensing decision-making model for discrete
site selection model detailed by Cody and Adams
(Cody and Adams, 2017). However, our model
keeps visited-sites in memory rather than discarding
the sites deemed dangerous or problematic a trait
common to swarming algorithms that implement site
abandonment such as the one developed by Cody and
Adams (Cody and Adams, 2017). Our model allows
for the agents to perform the re-evaluations necessary
to select the best site in the search space. The aim
of the model is to enable a swarm to re-evaluate its
decisions to select the best site and increase decision
accuracy allowing for a more flexible swarm behav-
ior.
The paper is organized as follows. Section 2 re-
views the biological inspiration and the swarm site
selection research. Section 3 describes our proposed
quorum sensing re-evaluation model. Section 4 de-
scribes the experimental design for simulations. Sec-
tion 5 presents the results. Sections 6 and 7 discuss
the results and areas of future work.
2 BACKGROUND
2.1 Natural Swarms
The Diacamma indicum ant species, also known as
Indian queen-less ant, utilizes a process known as tan-
dem running for nest relocation. Tandem running in-
volves one ant leading another ant to a nesting loca-
tion, one at a time and keeping close physical con-
tact with the other ant. Additionally, the D. Indicum
performs re-evaluations in response to changes in the
target nest during nest relocation, with a negligible er-
ror (1.65%) according to a study conducted by Anoop
and Sumana (Anoop and Sumana, 2015).
The Temnothorax Albipennis ant species, also
known as rock ant, utilizes tandem running as well
as a population dependent decision-making mecha-
nism known as quorum sensing. As more and more
ants visit a nesting location, a quorum of ants favor-
ing that particular site over other sites starts to build.
Once a certain known threshold is surpassed, the ants
disperse to recruit other agents to the site that has been
decided upon (Pratt, 2005). This recruitment mecha-
nism has a recruitment rate three times that of tandem
runs.
The decision-making model we developed draws
inspiration from the recruitment methods of the Dia-
camma indicum and the Temnothorax Albipennis ant
species.
2.2 Swarm Models
Several artificial swarm decision-making models have
been developed (Tan and Zheng, 2013). The Cody
and Adams value sensitive quorum sensing decision
making model is one model involving discrete site
selection in autonomous swarms (Cody and Adams,
2017; Reina et al., 2015).
The quorum sensing re-evaluation model de-
scribed in this paper utilizes principles of the Cody
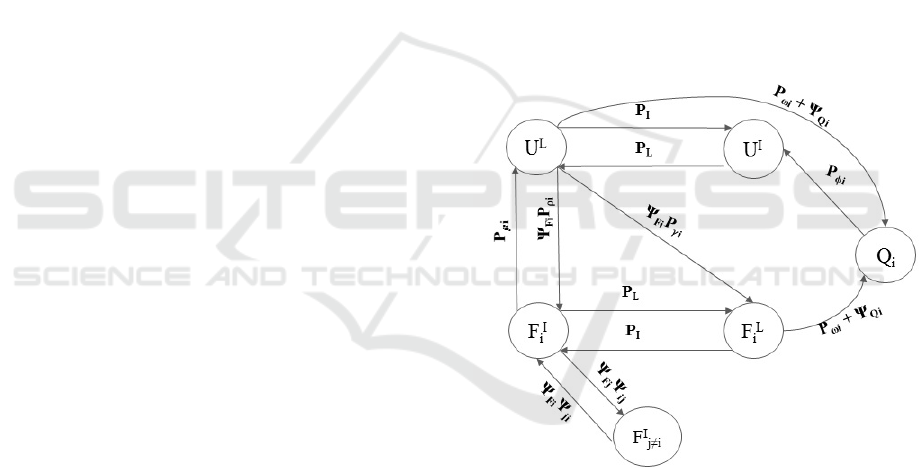
and Adams model. In this model (Figure 1), agents
can be in one of three states: uncommitted, favor-
ing, or quorum, and one of two categories: latent
and interactive. Agents in the uncommitted state do
not have a preference towards a particular site in the
search space, while favoring agents do have a prefer-
ence towards a site. Agents in the quorum state have
decided on a particular site and work towards recruit-
ing other agents to that site. Latent agents explore the
search space for sites and interactive agents remain
in the nest and interact with other agents and recruit
those agents to a particular site.
Figure 1: The Quorum Sensing Re-evaluation behavior
model with its nodes and transitions. State types are rep-
resented as: U , uncommitted; F, favoring; and Q, quorum.
Categories are represented as: L, latent and I, interactive.
Transitions between states are depicted using symbols P
and ψ, where P is a specific probability function detailed in
Equations 1-8 in the text and ψ is the population of agents
in the specified state (shown in subscripts). i and j denote
specific sites the agent is interacting with.
3 QUORUM RE-EVALUATION
ALGORITHM
The agents in the swarm start in the nest and have
the goal of selecting the best site out of a total of
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
194

n sites. For simplicity of this model, each site has
a starting value between 0 and 1 based on its dis-
tance from the nest. Sites that are closer to the nest
have a larger value. However, in real-world situa-
tions the site values will be determined by a number
of other factors, including quality, size, and distance.
Each agent has a known sensing and communication
range. As compared to an algorithm that does not re-
evaluate decisions when necessary, the re-evaluation
algorithm proposed would increase decision accuracy
but increase decision time.
3.1 States and Transitions
Using principles from the Cody and Adams model,
the agents in the swarm system start in the nest as
uncommitted latent agents. Agents can transition be-
tween uncommitted latent and uncommitted interac-
tive with a probability P
I
and P
L
, where R is the in-
verse of the average site round trip time and i and l are
the population of agents that are interactive and latent
respectively as referenced in equations 1 through 3.
p(i,l) =
i
i + l
(1)
P
I
=
(
R P
L
≤ 1
0 P
L
= 0
(2)
P
L
=
(
p(i,l)R p(i,l)R < 1
1 p(i,l)R ≥ 1
(3)
Once a site has been explored long enough, the agent
has the option to favor the site or leave the site and
explore another site. When a site is favored, the agent
can be in either the favoring interactive or the favoring
latent state.
Much of the agents decision making is governed
by properties of ant colony optimization (ACO),
specifically through pheromone production (Ab Wa-
hab et al., 2015). Ants produce pheromones to com-
municate with other ants, typically when recruiting
other ants in the colony. The use of pheromones for
communication is an integral part of emergent behav-
ior seen in nature (von Thienen et al., 2014).
In ACO the probability of any one agent relo-
cating from site i to site j is determined by equation 4.
P
ρ
i
=
(τ
i j
)
α
(η
i j
)
β
∑
(τ
i j
)
α
(η
i j
)
β
(4)
η
i j
= v
j
,v
j
= [0,1] (5)
τ
i j
= (1 − r)τ
i j
+ ∆τ
i j
(6)
∆τ
i j
=
(
R
10
0
(7)
Probability P
ρ
i
is governed by the amount of
pheromone on the path to site j (τ
i j
) and the site de-
sirability value, which in this case is the site qual-
ity value of site j, denoted by v
j
. The amount of
pheromone on a path is determined by the amount re-
maining after evaporation at rate r and the amount that
is deposited on the path denoted by ∆τ
i j
.
When an agent in the model transitions from un-
committed latent state to favoring interactive state, the
agent utilizes the pheromone probability rule moving
from the nest to the site it began to favor. When tran-
sitioning from uncommitted latent to favoring latent,
the agent drops ”pheromone” at the site it favors in
order to help attract other agents to that site. In the
case of unmanned vehicles this ”pheromone” is rep-
resented as increases to the site value by a predeter-
mined value. In this paper that predetermined value
is 0.025. Additionally, the rate of evaporation is also
set to 0.25 units per iteration. When an agent has de-
termined a site better than the one it currently favors,
rather than abandoning the site, as in previous mod-
els, the agents drop a different type of ”pheromone”,
which has a lower evaporation rate, before reverting to
the uncommitted latent state. In the case of unmanned
vehicles, this ”pheromone” is also represented as de-
creases to the site value by the same value; however,
the evaporation rate is 0.75 units per iteration. This
allows for the site value to decrease faster, indicating
to other agents that this site is not suitable, but can be
reconsidered if a re-evaluation is necessary.
When enough agents are favoring a site, such that
the quorum threshold is surpassed, these agents tran-
sition to the quorum state. These agents then re-
cruit other agents to the determined quorum site. In
the case that the site value of the quorum site has
changed, the agent can revert back to the uncommit-
ted interactive state at probability P
φ
i
and perform a
re-evaluation.
P
φ
i
=
(
1
v
i
2
v
i
1
< 1
0
v
i
2
v
i
1
≥ 1
(8)
The agents compare the previous site value with the
changed site value. If the new value is lower than the
previous one and the value is less than the value of
the other sites, the agent transitions to the uncommit-
ted interactive state and re-evaluates the other sites to
choose the next best site.
4 EXPERIMENT
It was our hypothesis that our quorum-sensing re-
evaluation algorithm would increase both the decision
time and decision accuracy.
Quorum Sensing Re-evaluation Algorithm for N-Site Selection in Autonomous Swarms
195
To test our hypothesis, the model developed was
simulated using the Processing programming lan-
guage (Reas and Fry, 2014). A total of 50 agents
were used to simulate site selection with two, three,
four, and five sites. The search space is depicted by a
450 x 450 pixel square. The nest, in the center of the
search space, is represented by a 60 x 60 pixel square
and the other sites are represented by 70 x 70 pixel
squares. The original site value of each site was in-
versely proportional to the distance from the nesting
location (Figure 2). The optimal sensing range and
speed for the agents were determined to be 13 pixels
and 10 pixels/s, respectively. The threshold for transi-
tioning to a quorum state was determined to be at least
5 agents per site. The simulations were run with and
without changes in the quorum site value. Changing
the quorum site value allows the testing of the effi-
ciency with which the algorithm allows the agents to
re-evaluate past quorum decisions. To test the ability
of the swarm to re-evaluate decisions, once the agents
sense a quorum at a particular site, the site value is
reduced by 0.3. After this reduction, if the value of
the site is less than the value of other sites, the value
reduces to 0.0 to allow for a re-evaluation of the other
sites. Otherwise, if the site value after reduction is
still greater than the value of other sites, there is no
additional change to the site value. The simulation
terminates after all agents have reached a quorum de-
cision. For each simulation group, 100 trials were run.
For each trial, the decision time and the number
of agents that found a quorum at each site were noted.
For trials involving two sites, the accuracy was de-
termined by the number of agents that chose the best
site. For trials involving three, four, and five sites, the
accuracy was determined by the number of agents that
chose the best two sites, based on the final site values.
Accuracy was determined using the following: n/50,
where n is the number of agents that selected the best
sites (one or two, depending on the total number of
sites) and 50 is the preset total population of agents
used in the simulation.
5 RESULTS
The graphs in Figure 3 show the change in decision
time over the number of sites in the search space and
the change in decision accuracy over the number of
sites in the search space.
Between the trials without re-evaluations and with
re-evaluations, the average decision time increased
by roughly 100 milliseconds. The average decision
time also generally increased with the number of sites
in the search space. Additionally, decision accuracy
showed an increase for the trials with re-evaluations
as compared to the trials without re-evaluations. De-
cision accuracy did, however, decrease as the number
of sites in the search space increased. For 2-site selec-
tion, the accuracy increased from 99.0% without re-
evaluations to 100.0% with re-evaluations. For 3-site
selection, the accuracy increased from 80.7% without
re-evaluations to 93.9% with re-evaluations. For 4site
selection the accuracy increased from 77.6% without
re-evaluations to 89.0% with re-evaluations. For 5-
site selection, the accuracy increased from 80.6% to
93.84%.
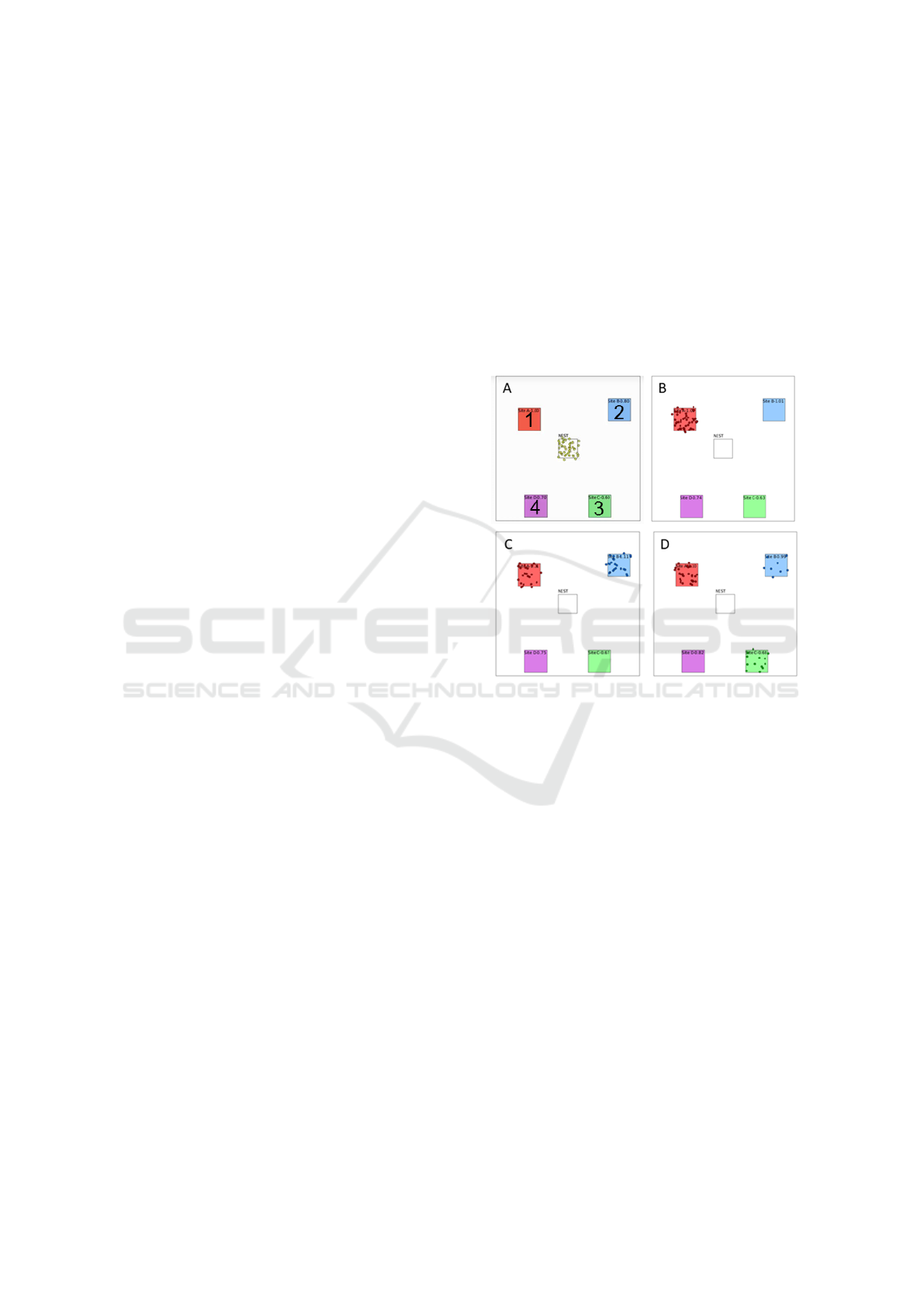
Figure 2: A: Screenshot of an original setup of the search
space for a 4-site selection simulation. The original site
value of each site is inversely proportional to the distance
from the nesting location. Site 1 (red) has a highest site
value of 1.0, Site 2 (blue) has a site value of 0.8, Site 3
(green) has a site value of 0.6 and Site 4 (purple) has a site
value of 0.7. B, C, and D: Screenshots of examples of sim-
ulations after agents have sensed a quorum. Accuracy in
examples B and C is 100% and accuracy in example D is
74%.
A t-test analyzing the decision time for 2, 3, 4,
and 5 sites produced p-values of 0.001, 2.154 ∗ 10
−8
,
1.120 ∗ 10
−5
, and 0.042 respectively. Additionally,
the same test analyzing decision accuracy for 2, 3, and
4 site selection produced p-values of 0.160, 0.0003,
0.0086, and 0.0004 respectively. Based on these val-
ues, we can not conclude that the re-evaluation algo-
rithm significantly increases decision accuracy for 2-
site selection. However, we have reasonable evidence
to suggest that the re-evaluation algorithm increases
accuracy for 3, 4, and 5-site selection.
The model was able to successfully increase the
accuracy of the decisions made by the swarm with de-
cision time as a trade-off.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
196

Figure 3: Box-plots showing distribution of the decision time (in milliseconds) by number of sites in the search space with
average decision time, depicted with x (Left). Decision Accuracy (%) by number of sites in the search space (Right).
6 DISCUSSION
The ability to make flexible decisions is imperative
for the development of swarm robotics and decision-
making. Our algorithm permits the swarm agents
to successfully re-evaluate sites in a defined search
space. The algorithm can be adapted in HADR mis-
sions where local citizens need to be evacuated to
safe shelter locations. In a disaster-struck community,
agents in a swarm system can assess the shelter sites
in the area using our algorithm to reach an accurate
consensus regarding the safest shelter to transport the
citizens to. If a potential shelter location has suddenly
deteriorated, our algorithm permits the agents to re-
evaluate their past quorum decisions to reach a new
consensus regarding the next best shelter.
Information regarding the safest shelter location
can be transmitted to first responders to safely evacu-
ate citizens to the selected shelter. The ability to re-
evaluate decisions could also help mitigate issues like
overcrowding and supply shortages in shelters during
such disasters, significantly contributing to the effi-
ciency and improvement of HADR missions.
This paper demonstrates the efficiency of a
quorum-sensing re-evaluation algorithm using inspi-
ration from biological swarm systems, allowing for
more accurate decisions to be made with decision
time as a trade-off. In the future this model may
very well prove itself useful in the location of sus-
tainable shelters for areas devastated by disaster and
be of good aid to HADR missions.
7 FUTURE WORK
Future work should focus on testing the algorithm us-
ing swarms of autonomous drones in a physical space.
For simplicity, the assigned site values in our model
were inversely proportional to the distance from the
nest. To evaluate the suitability of our model for real-
world situations, the site values will have to take into
account a number of other factors, including quality,
size, and distance, depending on the operation.
Additional testing can also be done with more
sites in the search space. Sites of different sizes and
shapes can also be tested to assess the behavior of the
algorithm in more varied situations. Improvements
can also be made to address the issue of agents that
have traveled out of the search area and are no longer
able to sense other agents or sites as well as defec-
tive agents that have developed capability issues. Ad-
dressing this issue can contribute to decreasing the de-
cision time while increasing decision accuracy.
Future work should also focus on developing
algorithms that account for multiple cycles of re-
evaluation. The proposed and future quorum-sensing
models will be capable of revisiting the sites that were
previously abandoned and re-evaluating them under
the dynamic conditions of the real-world scenarios.
In addition, we would like to explore extensions of
the algorithm to search large state spaces for potential
solutions using multiple agents as processors.
ACKNOWLEDGMENTS
Shreeya Khurana, a fellow of the Science and Engi-
neering Apprenticeship Program, would like to ac-
Quorum Sensing Re-evaluation Algorithm for N-Site Selection in Autonomous Swarms
197

knowledge the Office of Naval Research for provid-
ing an opportunity to conduct this research at the US
Naval Research Laboratory in Washington DC during
the summer of 2019.
REFERENCES
Ab Wahab, M. N., Nefti-Meziani, S., and Atyabi, A. (2015).
A comprehensive review of swarm optimization algo-
rithms. PLOS ONE, 10(5):1–36.
Anoop, K. and Sumana, A. (2015). Response to a change
in the target nest during ant relocation. Journal of Ex-
perimental Biology, 218(6):887–892.
Cody, J. R. and Adams, J. A. (2017). An evaluation of quo-
rum sensing mechanisms in collective value-sensitive
site selection. In 2017 International Symposium on
Multi-Robot and Multi-Agent Systems (MRS), pages
40–47.
Diamandis, P. (2019). Ai and robotics are transforming dis-
aster relief.
Pratt, S. (2005). Quorum sensing by encounter rates in
the ant temnothorax albipennis. Behavioral Ecology,
16:488–496.
Reas, C. and Fry, B. (2014). Processing: a programming
handbook for visual designers and artists. MIT Press.
Reina, A., Valentini, G., Fernndez-Oto, C., Dorigo, M., and
Trianni, V. (2015). A design pattern for decentralised
decision making. PLOS ONE, 10(10):1–18.
Tan, Y. and Zheng, Z.-y. (2013). Research advance in
swarm robotics. Defence Technology, 239.
von Thienen, W., Metzler, D., Choe, D.-H., and Witte, V.
(2014). Pheromone communication in ants: a de-
tailed analysis of concentration-dependent decisions
in three species. Behavioral Ecology and Sociobiol-
ogy, 68(10):1611–1627.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
198
