
Explaining the Ergonomic Assessment of Human Movement in
Industrial Contexts
Sara Santos
1 a
, Duarte Folgado
1 b
, Jo
˜
ao Rodrigues
2
, Nafiseh Mollaei
2
,
Carlos Fuj
˜
ao
3
and Hugo Gamboa
1,2 c
1
Associac¸
˜
ao Fraunhofer Portugal Research, Rua Alfredo Allen 455/461, 4200-135 Porto, Portugal
2
Laborat
´
orio de Instrumentac¸
˜
ao, Engenharia Biom
´
edica e F
´
ısica da Radiac¸
˜
ao (LIBPhys-UNL), Departamento de F
´
ısica,
Faculdade de Ci
ˆ
encias e Tecnologia, FCT, Universidade Nova de Lisboa, 2829-516 Caparica, Portugal
3
Volkswagen Autoeuropa, Quinta da Marquesa, 2954-024 Q.ta do Anjo, Portugal
Keywords:
Ergonomics, Industry, Musculoskeletal Disorders, Inertial Sensors, Motion Capture, Risk Score.
Abstract:
The repetitive nature of manufacturing processes is identified as a risk factor for the onset of musculoskeletal
disorders. For prevention, the operator’s exposure risk is measured through ergonomic risk scores which are
often associated with a workstation, ignoring the variability among operators. Moreover, the score values
hinder a comprehensive interpretation by occupational physicians. Observation methods require significant
effort, preventing accurate and continuous evaluation. The conducted study developed a solution using inertial
sensors for automatic operator risk exposure in the manufacturing industry. Two experimental assessments
were conducted: laboratory validation, performed by 14 subjects, using an optical motion capture system as
a reference; and field evaluation, with 6 participants, acquired on a real automotive assembly line, served as
the basis for an ergonomic risk evaluation study. Through the research, it was implemented an upper-body
motion tracking algorithm relying on inertial information, to estimate the angular orientation of anatomical
joints. An adjusted ergonomic risk score, based on direct measurements was developed allowing an ergonomic
evaluation which also has an explanation approach, based on the comprehensive analysis of the angular risk
factors. Direct measurements fasten the ergonomic feedback, consequently, the evaluation can be extended to
more operators, ultimately preventing work-related injuries.
1 INTRODUCTION
Work-related musculoskeletal disorders (WMSDs)
represent a significant portion of work-related health
problems in the European Union, impacting employ-
ees from different working sectors (Irastorza et al.,
2010). According to the World Health Organization,
musculoskeletal conditions are the second largest
contributor to disability worldwide and they are pre-
dicted to rise as the global population ages (Luttmann
et al., 2003). During 2017-2018, the upper limb or
neck disorders accounted for approximately 42% of
WMSDs, and within these, elbow diseases are the
most prevalent (H. Seidel et al., 2019).
In some industry sectors, e.g. textile and auto-
motive, production processes are typically based on
a
https://orcid.org/0000-0002-2554-3648
b
https://orcid.org/0000-0002-8481-6079
c
https://orcid.org/0000-0002-4022-7424
the cooperation between humans and machines. Al-
though the work methods carried out by workers have
predefined motions and actions, their repetitive nature
can increase the risk of musculoskeletal disorders de-
velopment, leading not only to absenteeism but also
early retirement and loss of productivity (Uva et al.,
2008; Varandas. et al., 2019).
On large industrial environments, there are still
some unsolved challenges which prevent a more ef-
fective ergonomic job analysis. During the work
method design, which comprises a set of predefined
motions, manufacturing industries rely on ergonomic
assessment tools which measure the workers’ risk ex-
posure through a risk score value. Thus, for a given
work method, the global risk score is calculated tak-
ing into account all local scores associated with each
motion or action that composes the work cycle. How-
ever, those are based on an average worker, mean-
ing that they do not take into account the variability
among operators that may exist at the manufacturing
Santos, S., Folgado, D., Rodrigues, J., Mollaei, N., Fujão, C. and Gamboa, H.
Explaining the Ergonomic Assessment of Human Movement in Industrial Contexts.
DOI: 10.5220/0008953800790088
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 4: BIOSIGNALS, pages 79-88
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
79

plant population, such as anthropometric variations,
operator’s age and work experience. Additionally, er-
gonomic teams might still rely on observational meth-
ods, which involve dedicated personnel to observe or
video record operators at work for posterior analysis.
Due to the high workload involved in this process, it
becomes unfeasible to employ observational methods
across the complete manufacturing population. More-
over, the outcome of the ergonomic risk assessment
results in a number which quantifies the associated
risk yet, when occupational doctors receive their pa-
tients and wish to access the history of the assigned
workstations and associated ergonomic risk, they only
have access to a score to describe the risk, which is in-
sufficient for an adequate analysis to the contributing
risk factors that lead to a given global risk score.
Although robots are becoming more common in
manufacturing environments, operators are still es-
sential. However, the concept of an operator is under-
going a paradigm shift through the new generation of
operators coming entitled ”Operator 4.0”. These new
smart and skilled workers will have ”super-strength”
provided by exoskeletons, smarter decision capabil-
ities supported by artificial intelligence, and able to
age healthily at work supported by a set of wearable
body monitoring devices (Romero et al., 2016).
2 RELATED WORK
Wearable devices have attracted considerable atten-
tion to industrial environments. By using inertial mo-
tion capture systems, data can be collected, and sev-
eral parameters can be directly measured, e.g. posi-
tion and velocity of each body segment, postural an-
gles trends and gait parameters, making these funda-
mental for ergonomics studies (Caputo et al., 2019;
Wang. et al., 2019).
Several surveys have been published concern-
ing human motion tracking as in (Filippeschi et al.,
2017) and (Pereira et al., 2017). Among the studies
which used human motion tracking methods for er-
gonomic assessment in industrial concepts, (Battini
et al., 2014) used solely inertial sensors to perform a
full-body ergonomic evaluation based on several er-
gonomic worksheets. (Peppoloni et al., 2016) and
(Vignais et al., 2017) focused on the ergonomic as-
sessment of the upper body regions but combined the
inertial measurement units (IMUs) with other meth-
ods such as electromyography, goniometers and video
system. On the other hand, (Bauters et al., 2018) re-
lied on a video system to perform a full-body analysis
to deliver operators productivity indicators.
In general, the studies fail to provide an error es-
timate for their motion tracking system. This can be
achieved by matching the proposed tracking methods
against other validated motion capture technique con-
sidered as ground truth. Moreover, the overall results
of ergonomics worksheets are uniquely a single score
value, lacking a more comprehensive analysis of the
risk factors.
There are some limitations associated with the use
of inertial sensors. For instance, gyroscope’s mea-
surements are affected by drift over time due to the
integration of device’s defects and noise (Beavers,
2017). Furthermore, sensor fusion techniques often
require to tune empirically the most adequate filter
parameters. Hence, one solution is to use a comple-
mentary filter with few tuning parameters to mitigate
the impact of gyroscope’s drift. Video systems also
present some challenges, e.g. the recordings are lim-
ited to defined camera angles.
This work comprises the development of a mo-
tion tracking framework for a direct and continuous
ergonomic risk assessment on industrial contexts. We
intended to encompass a cost-effective solution to es-
tablish quantitative direct measurements of posture
and movement using inertial information, from ac-
celerometers, gyroscopes and magnetometers, for the
upper-body. Those measurements will be able to con-
tinuously monitor operators individually producing
also more comprehensive reports with explanations,
concerning the most contributing factors for the cal-
culated risk scores. Herewith, our work presents three
major contributions: (1) an upper-body motion track-
ing algorithm relying only on inertial information,
to estimate the absolute or relative angular orienta-
tion of anatomical joints; (2) the development of an
adjusted ergonomic risk score, based on direct mea-
surements, and (3) an ergonomic risk explanation ap-
proach, based on the comprehensive analysis of the
angular risk factors. It is expected that in long-term
this solution will help in the prevention of upper limb
WMSDs arising from repetitive tasks.
3 PROPOSED METHOD
When planning the implementation of a system using
direct methods for an ergonomic assessment, there are
typically three design considerations: explainability,
invasiveness and scalability. Explainability relates to
the degree of information that a setup can report. In-
vasiveness is related to the operator’s discomfort level
and also to the impact on the operator’s performance
due to the setup. Scalability establishes how many
subjects can, simultaneously, use the setup, depend-
ing on invasiveness and cost. We propose a system
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
80
which allows extracting information at an interme-
diate level, i.e. calculating low-level metrics of er-
gonomic risk and not demanding a large number of
sensors. Thus, it is expected that the system has an
average level of scalability, explainability and inva-
siveness.
3.1 System Overview
The developed upper body motion tracker system is
a sequential algorithm designed to obtain the time-
dependent angular information of several anatomical
segments. Since the upper limbs and spine are re-
gions with a higher prevalence and incidence of work-
related musculoskeletal disorders, the upper body was
the main focus of this research. Therefore, four
anatomical segments were defined:
• Arm segment, as the segment between shoulder
and elbow joint;
• Forearm segment, as the segment between elbow
and wrist joint;
• Hand segment, as the segment between wrist and
distal region of the third metacarpal;
• Torso segment, as the segment between the jugu-
lar notch and the xiphoid process of the sternum.
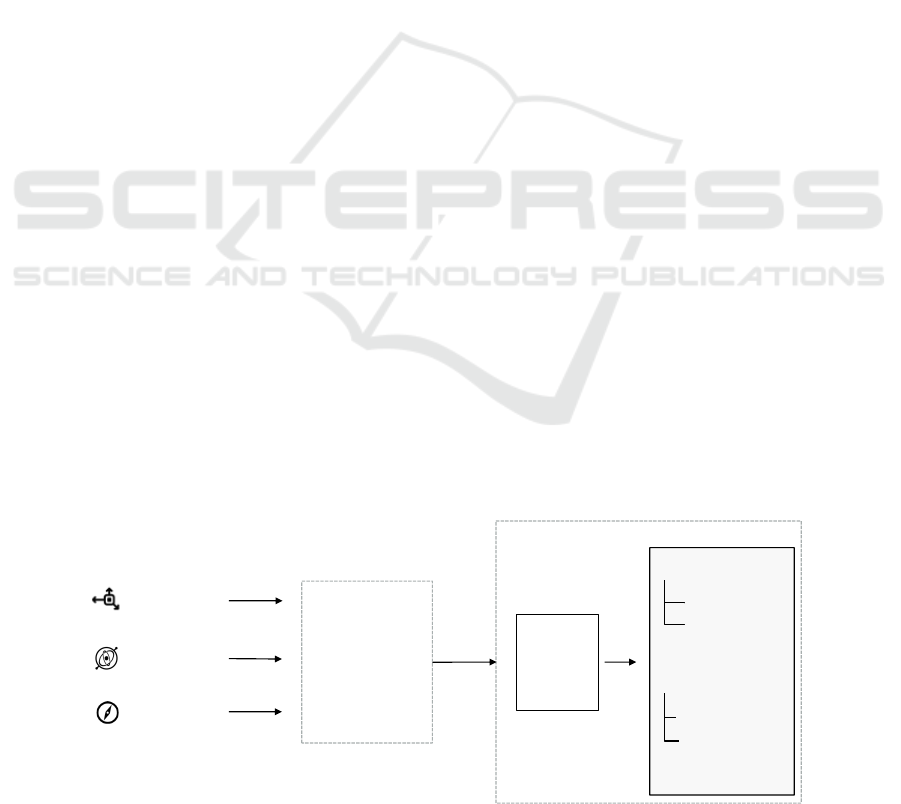
The motion tracker implementation pipeline is de-
picted in Figure 1.
Data acquisition is the first stage of the process.
Four IMU devices were employed and each of them
was attached to one of the four considered segments,
collecting acceleration, angular velocity and the mag-
netic field data.
Signal processing methodology comprises pre-
processing and orientation estimation. The first was
divided into two main processes: temporal synchro-
nisation, where equal sampling frequency and tempo-
ral alignment was ensured between the four IMU de-
vices, and noise reduction, through the implementa-
tion of a first-order low-pass Butterworth filter with a
cutoff frequency of 1 Hz, on accelerometer and mag-
netic field data. In its turn, orientation estimation de-
scribes the applied sensor fusion method and the nec-
essary considerations to obtain the angular informa-
tion of one segment relative to another or relative to
an anatomical plane.
The considered model admits flexion/extension,
abduction/adduction, for shoulder joint; flex-
ion/extension and pronation/supination for the
elbows; flexion/extension and ulnar/radial deviation
for the wrist. Finally, the model also allows for the
torso flexion/extension and lateral flexion/extension.
Consequently, the whole model admits 8 degrees-
of-freedom and considers human movements of the
upper limb and torso.
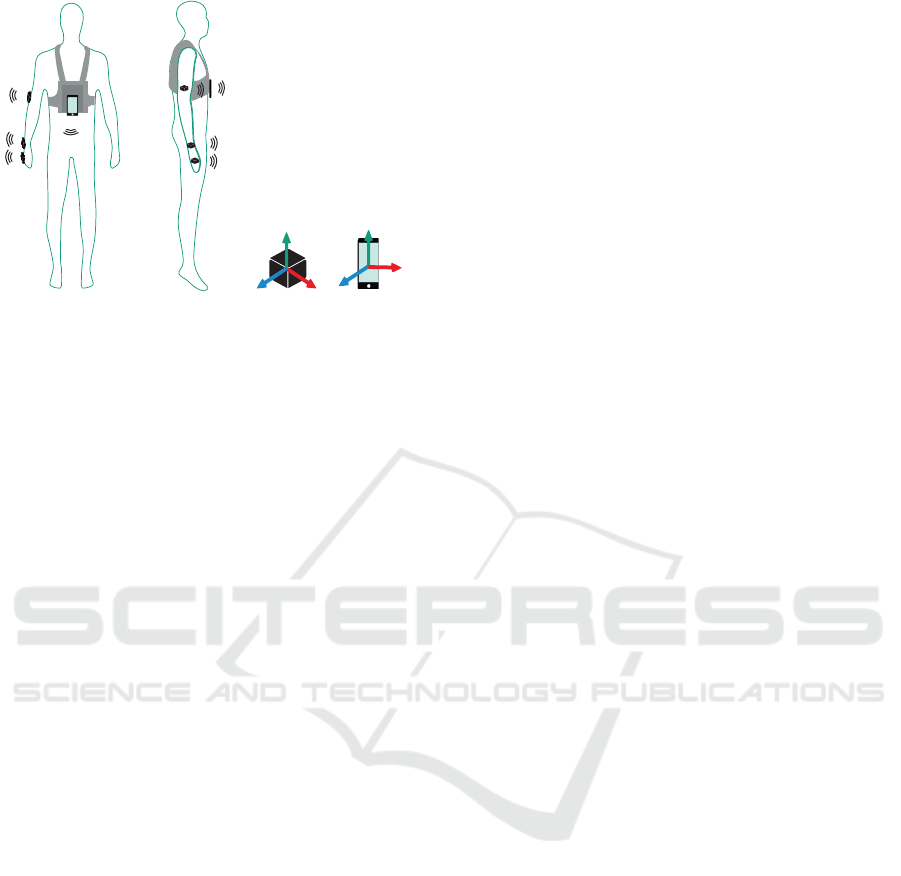
3.2 Inertial Signal Acquisition
In the context of this research, 9-DoF IMUs contain-
ing a triaxial accelerometer, gyroscope and magne-
tometer were employed. The IMU devices collect
data sampled at 100 Hz and they were placed at the
following regions: IMU 1, IMU 2 and IMU 3 were
positioned at the posterior side of the hand, forearm
and arm, respectively. Particularly, IMU 2 was placed
in the wrist area and IMU 3 was located in the elbow
region. IMU 4 was positioned in the thorax area. To
assure a common axis alignment, the local axes direc-
tion of each device must be known before attaching
the device to the subject. It was considered that the
Y-axis, of all devices, points up. Figure 2 illustrates
the inertial devices placement.
Absolute Orientation
Acceleration
Magnetic Field
Angular velocity
Pre-processing Orientation Estimation
Relative Orientation
Frontal
Sagittal
Raw Sensor
Forearm - Hand
Arm - Forearm
θ
Noise reduction
Temporal
synchronization
Sensor
Fusion
Figure 1: Upper-body motion tracker system framework.
Explaining the Ergonomic Assessment of Human Movement in Industrial Contexts
81
Y
Z
X
Z
X
Y
Figure 2: Placement of the IMU devices: three units on the
right upper limb and one unit on the torso. The devices were
commonly aligned with Y-axis pointing up.
3.3 Orientation Estimation
In order to estimate the anatomical segments attitude,
the signals gathered from accelerometers, gyroscopes
and magnetometers was combined through a sensor
fusion method. An algebraic algorithm, followed by
a quaternion-based complementary filter (QCF), de-
rived from (Colton, 2007; Valenti et al., 2015), were
implemented.
3.3.1 Algebraic Method
Data from accelerometer and magnetometer sensors
were combined using an algebraic algorithm (Lerner,
2012). Throughout the algorithm implementation, the
information of these two vectors was combined defin-
ing an orthogonal coordinate system with the basis
vectors, expressed as a 3×3 rotation matrix. After-
wards, the rotation matrix can be translated into a ref-
erence quaternion, which represents the orientation of
a segment relative to Earth Reference Frame, follow-
ing East-North-Up configuration. However, the ref-
erence quaternion does not represent the final orienta-
tion, once it only relies on accelerometers and magne-
tometers readings. Nonetheless, this quaternion was
presented as measurements to QCF to obtain the final
estimated quaternion.
3.3.2 Quaternion-based Complementary Filter
The quaternion-based attitude method updates the es-
timated quaternion through gyroscope’s measurement
and rectifies it based on a reference quaternion from
the accelerometer and magnetometer measurements.
Using a quaternion representation of gyroscope’s
data and combining it with a previous instant es-
timated attitude quaternion, through the Hamilton
product, results in an update quaternion which rep-
resents the device rotation.
For initialising the filter, the update quaternion is
set equal to the reference quaternion. This way, both
of them represent the same device orientation. Never-
theless, for every sensor reading interval, a rectifica-
tion and calculation of the estimated quaternion take
place. Next, we used interpolation to the reference
and the update quaternions. A Spherical Linear Inter-
polation (SLERP) (Dam et al., 1998) allows to weight
between the two quaternions. Once the gyroscope is
very accurate in short intervals it is more weighted.
Nevertheless, to stabilise the unwanted sensor drift, a
minor amount of the interpolation is directed towards
accelerometer and magnetometer, which are sensors
more trustworthy in the long term.
The estimated orientation exhibits the QCF char-
acteristics which combine high-frequency measures
from gyroscope and low-frequency from accelerome-
ters and magnetometers to deliver reliable motion in-
formation.
3.4 Angular Trajectory Reconstruction
After determining the estimated segment quaternion,
it is possible to make assumptions on the angular mo-
tion. It is assumed that consecutive IMU devices,
placed on the upper limb segments, are aligned, i.e.,
have one local axis that has the same direction. Di-
rection vectors can be expressed through pure quater-
nions in Sensor Frame. Making use of the dot product
between two vectors, the angle between segments is
determined.
Angular information between two consecutive
segments is defined as relative orientation. On the
other hand, the angle between a segment and an
anatomical plane is defined as the absolute orienta-
tion. The anatomical planes were defined using the
local axes of an inertial device placed on a subject’s
torso. Additionally, the IMU device placed on the
torso segment is relevant to estimate the torso flexion
and lateral flexion. The angle of these last movements
is accomplished by comparing the torso’s current state
with torso’s rest position.
4 RESULTS
Two experimental assessments were conducted: labo-
ratory validation and field evaluation. The laboratory
tests enabled the creation of a movements’ dataset,
where the proposed technique and a computer vision
approach were compared with an optical motion cap-
ture system. The field evaluation dataset was acquired
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
82

on a real automotive assembly line and served as the
basis for the ergonomic risk assessment study.
4.1 Laboratory Validation
A validation protocol was designed to assess the pro-
posed method performance. Thus, to measure the
tracking error, the Vicon optical-passive motion cap-
ture system was used as a reference, which has a re-
ported error lower than 2 mm (Merriaux et al., 2017).
The proposed framework is intended to be used
through long-term acquisitions, corresponding to the
operator’s working shifts. However, sensor’s may
present some change in response over time, which
will be an issue. Another layer of information, to
periodically correct this sensor drift, might be a so-
lution. Despite video processing is computationally
more expensive than inertial sensor processing, it can
be used during short iterations to reset the drift from
sensors. Therefore, a video collection on the valida-
tion protocol is introduced to test and characterise the
computer vison-based library OpenPose (Cao et al.,
2018). The OpenPose is an open-source markerless
technology for multi-person 2D pose detection, iden-
tifying in total 135 keypoints, on single image, using
convolution neural network.
The acquisition protocol was performed by 14
subjects, nine men and five women, with an average
age of 26 ± 3 years. It allowed measuring the angu-
lar error across all considered joints in a wide range
of different movements. The validation protocol was
composed of two main parts: one describes a static
movement evaluation and the other details a dynamic
evaluation. The concepts static and dynamic denote if
the subject was standing or walking while doing the
designated movements, respectively.
Subjects wore a motion capture setup composed
of four IMUs sampling at 100 Hz and optical markers
tracked by Vicon cameras at 100 Hz. The Vicon setup
was composed of ten cameras, measuring an acquisi-
tion area of 8x4 m, and two standard cameras filming
the whole exercise, which were also used as input for
the OpenPose algorithm. The optical markers’ posi-
tions followed Vicon’s Upper Limb Model Guide de-
scriptions (Vicon Motion Systems, 2007). Raw data
is composed of 2 recording hours.
Several actions were manually segmented, specif-
ically flexion/extension, abduction/adduction/, lateral
flexion, ulnar/radial deviation and anatomical posi-
tion for static evaluation; flexion and anatomical posi-
tion for dynamic trials. Figure 3 exhibits an example
of an angular reconstruction, representing the perfor-
mance of QCF and OpenPose. It can be observed that
both methods reconstruct the motion similarly to Vi-
con however, it can be noted an offset from OpenPose
during abduction and from QCF during anatomical
position.
Time/ s
Angle/ °
Arm Abduction
Anatomical
Position
Action
Anatomical
Position
Abduction
Figure 3: Angular reconstruction of arm’s abduction and
adduction. QCF (green), Vicon (black) and OpenPose
(blue) results.
It is relevant to explain that the procedure adopted
to adjust the light conditions of the tests is complex.
On one hand, the best conditions for using Vicon re-
quire low ambient light, while on the other hand, the
conditions for using OpenPose require regular ambi-
ent light so that the subject’s skeletal image contours
can be identified by the model. It was decided to
minimise Vicon’s error, since it was considered the
ground truth of this study and low ambient light con-
ditions were applied. However, this fact degraded
the performance of OpenPose algorithm, and conse-
quently the hand segment had to be neglected due to
inadequate low light conditions.
To perform a quantitative performance assessment
of both methods, two evaluation metrics were used:
the Cumulative Distribution Function (CDF) and the
Root-Mean-Square Deviation (RMSE). The function
represented in equation (1) is the CDF of a real-valued
random variable X,
F
X
(x) = P(X ≤ x) (1)
where P(X ≤ x) is the probability that the considered
variable X takes on a value less than or equal to x.
Algorithms can be analysed using their RMSE as
a measure of how well they describe a given set of ob-
servations. Equation (2) represents the RMSE, where
y
t
denotes the groundtruth value at time t provided by
Vicon and ˆy
t
denotes the predicted value at time t es-
timated by the upper-body tracking method.
RMSE =
s
1
T
T
∑
t=1
(y
t
− ˆy
t
)
2
(2)
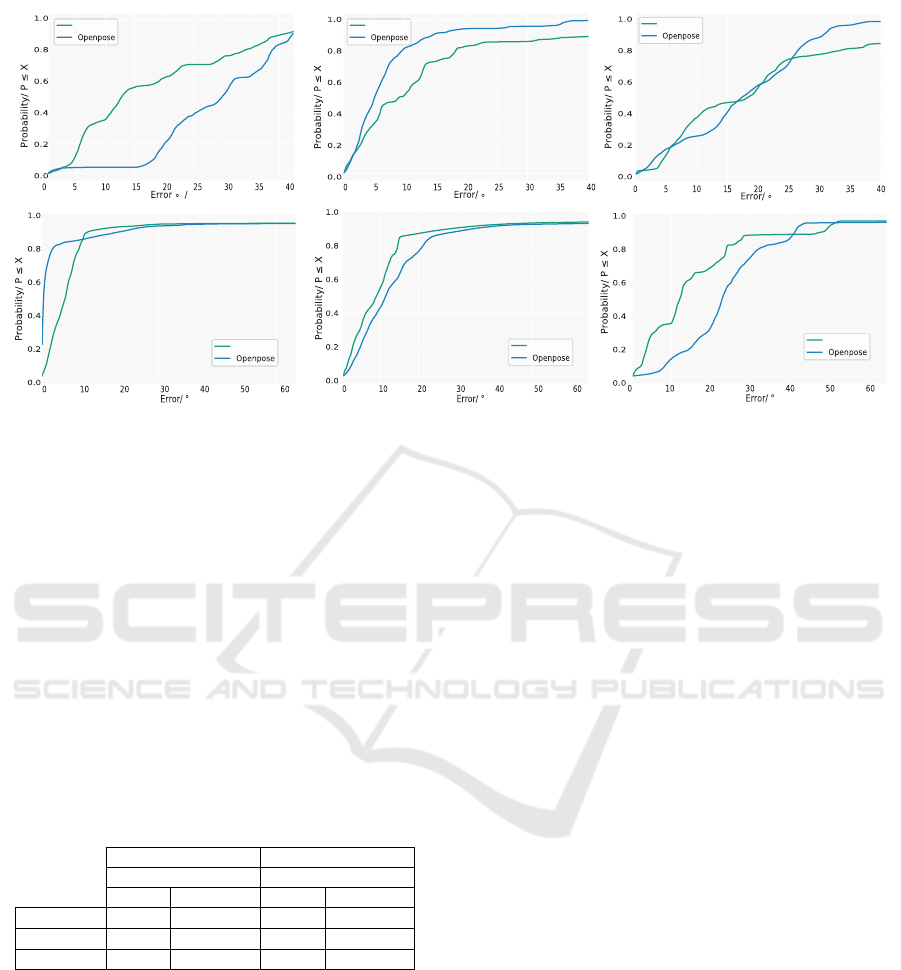
Firstly, the CDFs were calculated to assess each
segment performance under the QCF and OpenPose
Explaining the Ergonomic Assessment of Human Movement in Industrial Contexts
83
ArmTorso
Forearm
QCF
QCFQCF
QCF
QCF
QCF
Figure 4: Cumulative distribution function for the absolute error of OpenPose and QCF across torso, arm and forearm seg-
ments. Top: static evaluation; Bottom: dynamic evaluation.
methods. Figure 4 represents the CDF for QCF and
OpenPose techniques. Through the analysis of the
CDF for the static tests, it is possible to conclude that
arm and forearm’s movements present a lower error
when assessed with OpenPose algorithm. However,
the torso’s reconstruction shows better results with
QCF.
Contrary to static tests, in dynamic trials Open-
Pose presents better results for torso movements and
QCF has a higher performance for arm and forearm
exercises.
Table 1 represents the RMSE results for both static
and dynamic trials.
Table 1: Root mean square error regarding QCF and Open-
Pose methods. Static and dynamic evaluations.
QCF OpenPose
RMSE (
◦
) RMSE (
◦
)
Static Dynamic Static Dynamic
Torso 22 21 25 23
Arm 18 27 13 29
Forearm 30 20 20 27
In general, the table allows inferring that QCF and
OpenPose have similar performance. The arm seg-
ment presents the lowest movement’s error in static
trials. In its turn, the forearm segment overall results
show a higher error in both algorithms when compar-
ing it Vicon’s reference.
4.2 Field Evaluation
This section of the study consisted of an ergonomic
risk assessment of three workstations at a real auto-
motive assembly line, comprised by repetitive work
cycles.
In this study, we recruited six participants, four
men and two women, with an average age and height
of 31 ± 8 years and 173 ± 6 cm, respectively, without
any known musculoskeletal pathology. The operators
were asked to perform their working tasks while using
IMUs attached to their body. Prior to the experiment,
subjects signed and obtained a participation informed
consent. This research reports the results from three
workstations, Liftgate, Fender and Doors, from the
Bodyshop assembly line. Operators wore four IMUs
and were asked to perform two calibration positions,
N-pose and T-pose, in the beginning, and at the end
of the test. The curated dataset is composed of 4.23
recording hours.
4.2.1 General Workstation Risk
Before adopting strategies to improve working condi-
tions, situations that can contribute to operators’ risk
must be identified. Ergonomic indexes grant infor-
mation on the main risk factors, allowing to prioritise
interventions. The Rapid Upper Limb Assessment
(RULA) worksheet can be used to screen and identify
harmful postures (McAtamney and Corlett, 1993).
In this research, we developed an adapted version
of RULA’s, named Adjusted Rapid Upper Limb As-
sessment (AdRULA), which was implemented. The
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
84
Score2
3%
Score3
60%
Score4
35%
Score5
2%
Liftgate
Score2
3%
Score3
70%
Score4
26%
Score5
1%
Fender
Score2
17%
Score3
68%
Score4
15%
Doors
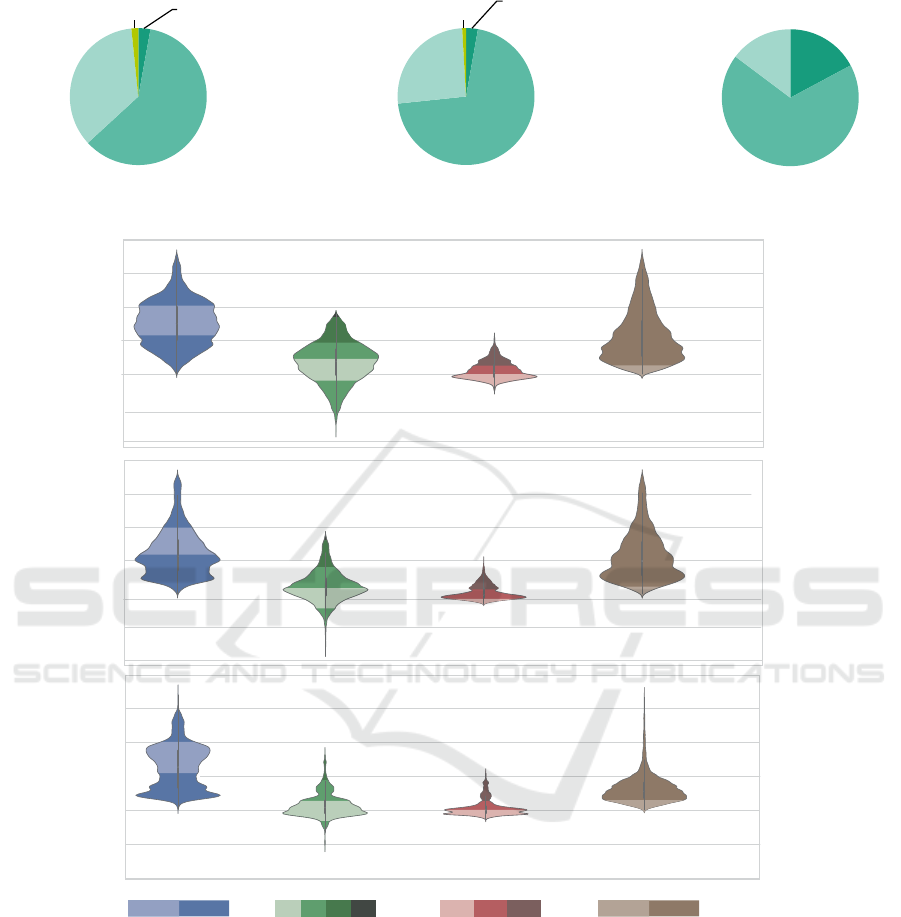
Figure 5: Liftgate, Fender and Doors workstation analysis. Mean score distribution for each workstation.
Liftgate
Fender
Doors
200
150
50
0
-50
-100
100
200
150
50
0
-50
100
200
150
50
0
-50
-100
100
Forearm Arm Torso Hand
+1 +2 +1 +2 +3 +4 +1 +2 +3
+2
+3
AdRULA
Angle/ °Angle/ °Angle/ °
Figure 6: Representation of operator’s average flexion and extension movements from Liftgate, Fender and Doors worksta-
tions with AdRULA score thresholds.
AdRULA focus on the subject’s upper-body selects
postures every 0.02 s and apprehends poses via direct
measurements, e.g., wearable technology. The local
and final scores are determined similarly to the RULA
method.
The average workstation’s score, using AdRULA
index, summarised in Figure 5, was determined
through two steps: 1) considering a single operator
performing the actions of a selected workstation, in
each work cycle, it was determined the percentage of
time spent in each score and, afterwards the individual
average was obtained; 2) the mean score for a given
workstation is finally calculated by averaging all the
operators scores (calculated in the previous step).
The charts demonstrate that, in general, when op-
erators perform tasks in the considered workstations
they stand for a longer period in a level 3-4 risk
zone which represents a low risk. Despite being a
Explaining the Ergonomic Assessment of Human Movement in Industrial Contexts
85

small percentage, the Liftgate and Fender worksta-
tions present a level 5 risk. Accordingly, those work-
stations represent a higher risk to operators in terms
of postures. We anticipated these results since Lift-
gate and Fender are workstations which require pos-
tures more prone to a higher exposure risk, such as
overhead motions.
4.2.2 General Workstation Explanation
From an ergonomic perspective, it is relevant to iden-
tify which movements contribute to a higher risk of
injuries. For the rest of this section, we present a
more detailed analysis of the factors that contribute to
the global scores, in order to complement the analysis
with a more interpretable and explainable methodol-
ogy. Figure 6 represents the distribution of extension
and flexion movements for each workstation, in the
form of a probability density of these data.
It can be observed that the torso’s movements have
similar angular distribution for the considered work-
stations. Moreover, for Liftgate and Fender, the hand
movements have a higher probability of performing
flexion exercises around 50
◦
while in the Doors work-
station the highest probability stands in the 25
◦
range.
Flexions and extensions distribution between arm and
forearm segments present evident unlikeness. While
in the Liftgate, the forearm presents a highest den-
sity probability between 50
◦
and 100
◦
, Fender and
Doors present two prominent probability peaks: 25
◦
and 50
◦
for Fender; 25
◦
and 90
◦
for Doors. Overall, as
working conditions are more demanding for arms and
hands, the Liftgate is classified with higher scores.
Doors workstation, with a larger probability of pos-
tures around the segment’s neutral zone, is evaluated
with lower levels.
4.2.3 Team Explanation
While working in the same workstation, operators
might not share the same characteristics, e.g., height,
weight, limbs length, and others. Figure 7 represents
the probability density of four different subjects per-
forming the tasks assigned to the Liftgate workstation.
Subjects’ characteristics are also depicted. Through-
out the analysis, it can be reasoned that among op-
erators from the same workstation, which have dif-
ferent characteristics, angular movements distribution
is not identical. Consequently, the individual’s er-
gonomic risk will be different from the one that could
be assigned to an average worker. The score value
might not be simple to interpret and consequently,
hinder occupational doctors and team leaders to per-
ceive operators’ needs. The individual analysis helps
to understand if the operator performs tasks within the
workstation risk range or if their characteristics inten-
sify/mitigate the risk. Thus, having personal reports,
with detailed movements information, can be an ad-
vantage for improving injuries-preventive recommen-
dations and for adjusting work conditions.
5 CONCLUSIONS
WMSDs represent a significant portion of work-
related health problems, affecting workers from all
sectors. This research provided three major contribu-
tions. Firstly, an upper-body human motion tracking
algorithm using inertial sensor information was used
to estimate the absolute and relative orientation of
anatomical joints. Secondly, an adjusted ergonomic
risk score was developed based on direct measure-
ments. Finally, an ergonomic risk explanation ap-
proach, based on the comprehensive analysis of the
angular risk factors was presented.
Several conclusions were established using the
validation dataset. The OpenPose approach was used
as a mocap method, with similar performance to QCF,
yet it has some challenges. The first is that OpenPose
is a computationally expensive algorithm. Secondly,
it is also prone to error in the presence of occlusion
(when the algorithm fails to track a limb).
Employing the estimated orientation of anatomi-
cal joints, provided by the system, it is possible to
conduct an ergonomic risk assessment. The work-
stations that presented a higher level of risk, Lift-
gate and Fender, behold actions that, effectively, re-
quire positions more susceptible to risk, e.g. over-
head work. Nowadays, the global risk score is often
agnostic to the variability of operators’ characteris-
tics and the scores, assigned based on ergonomics as-
sessments, use as reference an average worker. While
completing the risk analysis, it is possible to point out
evident motion differences among operators who per-
form the same workstation’s tasks. Hence, an individ-
ual ergonomic approach is better suited for prevent-
ing injuries, once it can unmask risk factors exposure.
The evaluation should be individual-related and not
the collective. Whenever risk exposure management
is a concern, the ergonomic analysis should be avail-
able for each worker. At last, providing explainability
to risk assessments is an added value to occupational
doctors once it allows a more comprehensive analysis
which can be relevant to support the decision-making
process for different strategies that can be addressed
to the worker by the Team Leader and/or occupational
doctor.
Comparing to previous researches presented in lit-
erature (Battini et al., 2014; Vignais et al., 2017) this
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
86

Subject 1
Angle/ °
200
150
50
0
-50
-100
Gender: Female
Age: 33
Height: 169 cm
Arm length: 28 cm
Forearm length: 24 cm
100
Angle/ °
200
150
50
0
-50
-100
100
Gender: Male
Age: 29
Height: 169 cm
Arm length: 26 cm
Forearm length: 22 cm
Forearm Arm Torso Hand
Gender: Male
Age: 23
Height: 180 cm
Arm length: 36 cm
Forearm length: 26 cm
Gender: Male
Age: 27
Height: 180 cm
Arm length: 32 cm
Forearm length: 25 cm
Subject 2
Subject 3
Subject 4
Angle/ °
200
150
50
0
-50
-100
100
Angle/ °
200
150
50
0
-50
-100
100
+1 +2 +1 +2 +3 +4 +1 +2 +3
+2
+3
AdRULA
Figure 7: Comparison of average flexion and extension movements distribution from four different subjects while performing
Liftgate’s tasks, with AdRULA score thresholds. Right side - subjects’ characteristics.
study provides a quantitative error estimate of the pro-
posed tracking system, accomplished through a lab-
oratory validation. We combined different analysis
tools regarding the two experimental assessments, the
laboratory validation and the field evaluation. The tri-
als required to design and organise two protocols in
which sensors attachment, calibration and monitoring
were detailed and contained guidelines for both par-
ticipants and specialists. Furthermore, the provided
ergonomic study is not only concerned with deliver-
ing a global risk analysis of a workstation, but it also
reaches the individual level.
With the current work, we can conclude that the
proposed method is feasible in a real manufacturing
context and provides a faster ergonomic analysis. Ac-
cordingly, we encourage the use of inertial sensors
as an effective method for detailed ergonomic assess-
ment in industrial environments. Nevertheless, the
study has a limited sample size thus, to improve ro-
bustness, the data collection should be increased.
As future work, it is expected to reduce the sen-
sor fusion accumulated errors of the long term system
which arise from the need of sensors to re-calibrate.
A solution would be introducing multimodal sensor
Explaining the Ergonomic Assessment of Human Movement in Industrial Contexts
87

fusion approaches, e.g. using video recordings to pe-
riodically calibrate the system. Video recordings are
limited to defined camera angles however, that shall
not be a problem since during repetitive tasks we can
anticipate the action places and position the cameras
accordingly. Additionally, the explanation approach
can be increased through the analysis of three dimen-
sions of risk factors exposure: intensity, duration and
frequency.
REFERENCES
Battini, D., Persona, A., and Sgarbossa, F. (2014). Inno-
vative real-time system to integrate ergonomic evalu-
ations into warehouse design and management. Com-
puters & Industrial Engineering, 77:1 – 10.
Bauters, K., Cottyn, J., Claeys, D., Slembrouck, M., Vee-
laert, P., and van Landeghem, H. (2018). Auto-
mated work cycle classification and performance mea-
surement for manual work stations. Robotics and
Computer-Integrated Manufacturing, 51.
Beavers, I. (2017). The Case of the Misguided
Gyro. https://www.analog.com/en/analog-dialogue/
raqs/raq-issue-139.html. Accessed: 2019-12-05.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh,
Y. (2018). OpenPose: realtime multi-person 2D pose
estimation using Part Affinity Fields. In arXiv preprint
arXiv:1812.08008.
Caputo, F., Greco, A., D‘Amato, E., Notaro, I., and Spada,
S. (2019). IMU-Based Motion Capture Wearable Sys-
tem for Ergonomic Assessment in Industrial Environ-
ment. Springer Nature, pages 215–225.
Colton, S. (2007). The Balance Filter - A Simple Solution
for Integrating Accelerometer and Gyroscope Mea-
surements for a Balancing Platform.
Dam, E. B., Koch, M., and Lillholm, M. (1998). Quater-
nions, interpolation and animation. Technical Re-
port DIKU-TR-98/5, Department of Computer Sci-
ence University of Copenhagen, Universitets parken
1DK-2100Kbh, Denmark.
Filippeschi, A., Schmitz, N., Miezal, M., Bleser, G., Ruf-
faldi, E., and Stricker, D. (2017). Survey of motion
tracking methods based on inertial sensors: A focus
on upper limb human motion. Sensors, 17.
H. Seidel, D., Ditchen, D., Hoehne-H
¨
uckst
¨
adt, U., Rieger,
M., and Steinhilber, B. (2019). Quantitative measures
of physical risk factors associated with work-related
musculoskeletal disorders of the elbow: A systematic
review. International Journal of Environmental Re-
search and Public Health, 16:130.
Irastorza, E. S., Xabier, and Copsey, S. (2010). OSH in
figures: Work-related musculoskeletal disorders in the
EU — Facts and figures. European Agency for Safety
and Health at Work.
Lerner, G. M. (2012). Three axis attitude determination.
In Wertz, J., editor, Spacecraft Attitude Determination
and Control, volume 73 of Astrophysics and Space
Science Library, chapter 12, pages 420–435. Springer
Netherlands.
Luttmann, A., J
¨
ager, M., Griefahn, B., Caffier, G., and
Liebers, F. (2003). Preventing Musculoskeletal Dis-
orders in the Workplace. World Health Organization.
McAtamney, L. and Corlett, E. N. (1993). Rula: a sur-
vey method for the investigation of work-related up-
per limb disorders. Applied Ergonomics, 24(2):91 –
99.
Merriaux, P., Dupuis, Y., Boutteau, R., Vasseur, P., and Sa-
vatier, X. (2017). A study of vicon system positioning
performance. Sensors, 17(7).
Peppoloni, L., Filippeschi, A., Ruffaldi, E., and Avizzano,
C. (2016). A novel wearable system for the online
assessment of risk for biomechanical load in repeti-
tive efforts. International Journal of Industrial Er-
gonomics, 52:1 – 11. New Approaches and Interven-
tions to Prevent Work Related Musculoskeletal Disor-
ders.
Pereira, A., Guimar
˜
aes, V., and Sousa, I. (2017). Joint an-
gles tracking for rehabilitation at home using inertial
sensors: a feasibility study. In Proceedings of the 11th
EAI International Conference on Pervasive Comput-
ing Technologies for Healthcare, pages 146–154.
Romero, D., Stahre, J., Wuest, T., Noran, O., Bernus, P.,
Fasth, Fast-Berglund, A., and Gorecky, D. (2016). To-
wards an Operator 4.0 Typology: A Human-Centric
Perspective on the Fourth Industrial Revolution Tech-
nologies. In International conference on computers
and industrial engineering (CIE46) proceedings.
Uva, A., Carnide, F., Serranheira, F., Miranda, L., and
Lopes, M. (2008). Les
˜
oes m
´
usculoesquel
´
eticas rela-
cionadas com o trabalho-guia de orientac¸
˜
ao para a
prevenc¸
˜
ao. Direcc¸
˜
ao Geral da Sa
´
ude.
Valenti, R., Dryanovski, I., and Xiao, J. (2015). Keeping
a good attitude: A quaternion-based orientation filter
for imus and margs. Sensors, 15:19302–19330.
Varandas., R., Folgado., D., and Gamboa., H. (2019). Eval-
uation of spatial-temporal anomalies in the analysis of
human movement. In Proceedings of the 12th Inter-
national Joint Conference on Biomedical Engineering
Systems and Technologies - Volume 4: BIOSIGNALS,,
pages 163–170. INSTICC, SciTePress.
Vicon Motion Systems (2007). Upper Limb Model. Product
Guide. http://www.vicon.com.
Vignais, N., Bernard, F., Touvenot, G., and Sagot, J. C.
(2017). Physical risk factors identification based on
body sensor network combined to videotaping. Ap-
plied Ergonomics, 65.
Wang., H., Mohamed Refai, M., and van Beijnum., B. F.
(2019). Measuring upper-extremity use with one imu.
In Proceedings of the 12th International Joint Confer-
ence on Biomedical Engineering Systems and Tech-
nologies - Volume 4: BIOSIGNALS,, pages 93–100.
INSTICC, SciTePress.
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
88
