
FSSSD: Fixed Scale SSD for Vehicle Detection
Jiwon Jun
1 a
, Hyunjeong Pak
2
and Moongu Jeon
1 b
1
Gwangju Institute of Science and Technology, 123 Cheomdangwagi-ro, Buk-gu, Gwangju, South Korea
2
Korea Culture Technology Institute, 123 Cheomdangwagi-ro, Buk-gu, Gwangju, South Korea
Keywords:
Vehicle Detection, Object Detection, Surveillance System.
Abstract:
Since surveillance cameras are commonly installed in high places, the objects in the taken images are relatively
small. Detecting small objects is a hard issue for the one-stage detector, and its performance in the surveillance
system is not good. Two-stage detectors work better, but their speed is too slow to use in the real-time system.
To remedy the drawbacks, we propose an efficient method, named as Fixed Scale SSD(FSSSD), which is an
extension of SSD. The proposed method has three key points: high-resolution inputs to detect small objects, a
lightweight Backbone to speed up, and prediction blocks to enrich features. FSSSD achieve 63.7% AP at 16.7
FPS in the UA-DETRAC test dataset. The performance is similar to two-stage detectors and faster than any
other one-stage method.
1 INTRODUCTION
As the architecture of deep convolutional neural net-
works(DCNN) has been evolved a lot recently, the
object detection algorithms using DCNN also have
been advanced significantly. Object detection has
evolved into two streams depending on the applica-
tion. Two-stage detectors such as Faster-RCNN(Ren
et al., 2015), FPN(Lin et al., 2017), and Mask R-
CNN(He et al., 2017), are often used where the accu-
racy is more important. On the other hand, if real-time
processing is more important, efficient one-stage de-
tectors such as SSD(Liu et al., 2016), YOLO(Redmon
et al., 2015) are commonly used.
Which of those two methods has been more fre-
quently used for vehicle detection? According to
the results of UA-DETRAC benchmark(Wen et al.,
2015), most of the high ranked detectors are based
on two-stage detectors. Why researchers commonly
have used two-stage detectors, not one-stage detec-
tors? Since the surveillance cameras are installed high
beside traffic lights and signs, the sizes of the taken
images of objects are small. One-stage detectors do
not detect small objects well, so that the issue is fatal.
Two-stage detectors seem better than one-stage
detectors, but there exists a critical weak-point as the
execution speed is too slow for a real-time system.
a
https://orcid.org/0000-0002-9100-3471
b
https://orcid.org/0000-0002-2775-7789
All high ranked two-stage detectors in UA-DETRAC
benchmark runs at speeds between 0.1 frames per sec-
ond(FPS) and 10 FPS when detecting 960 × 540 im-
ages. It is not enough for real-time processing since
most surveillance videos are 24 FPS or higher.
To this end, we propose an efficient one-stage de-
tector, named as fixed scale SSD(FSSSD), for real-
time vehicle detection in surveillance videos. Our
main contribution can be summarized as follows:
- Use High-resolution Images as Input. One-stage
methods require a fixed size input for correct ex-
ecution. For example, SSD resizes the inputs as
300 × 300 or 512 × 512. The resolution of surveil-
lance cameras is usually bigger than the fixed sizes.
Therefore resizing the image smaller is included in
preprocessing. It makes small objects smaller, which
makes one-stage methods even weaker. In this work,
we do not resize the images and use the original size
to avoid the issue.
- Design a Light Architecture for Real-time Detec-
tion. Using large size inputs improves performance
on detecting small objects, but it makes the execu-
tion speed significantly slower. To make feasible real-
time detection, we design a lightweight architecture
using ShuffleNetV2(Ma et al., 2018) and prediction
blocks(Lee et al., 2017).
- Use Fixed Scales for Freely Changing the Input
Size. Choosing the scales is very important to one-
stage methods for correct detection. Traditional one-
stage detectors using the SSD framework use relative
336
Jun, J., Pak, H. and Jeon, M.
FSSSD: Fixed Scale SSD for Vehicle Detection.
DOI: 10.5220/0008950503360342
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
336-342
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: The architecture of FSSSD: since fixed scale detection can change the input size, training time can be significantly
reduced by using training patches which is smaller than images used for the inference time.
scales which help detect all size of objects in an im-
age. Since the scales is relative, the scale informa-
tion of each feature map depends on the input size
as shown in Table 1. Therefore, the detectors are not
able to detect properly if the input size is changed.
However, if the input size can be changed, there are
lots of advantages such as decreasing training time
by using small size inputs or execution time by using
cropped images. So we use fixed scales instead of rel-
ative scales to take the advantages. This is described
in more detail in Sec. 3.1.4.
2 RELATED WORKS
2.1 Two-stage Detection
Two-stage detectors use region proposals, such as
selective search(Uijlings et al., 2013) or RPN(Ren
et al., 2015), to obtain proposals and detect each pro-
posal with deep neural networks. R-CNN(Girshick
et al., 2014) is the first two-stage detection model,
and its accuracy is significantly better than traditional
methods. Across Fast R-CNN(Girshick, 2015) and
Faster R-CNN, two-stage methods have developed
greatly, and models such as FPN and Mask R-CNN
are continuously proposed for more accurate detec-
tion. However, two-stage method has a fatal disad-
vantage: slow computation. Faster R-CNN operates
at only 7 FPS with high-end hardware.
2.2 One-stage Detection
One-stage detection is introduced to solve the slow
speed of two-stage detectors. The most famous one-
stage detectors are SSD and YOLO. Between them,
SSD is more widely used due to the convenience of
structure use. The detectors using the SSD frame-
work predict category scores and box offsets for mul-
tiple objects based on feature maps. By completely
eliminating the proposal generating process and en-
capsulating it with classification stage, the detectors
have achieved similar accuracy to two-stage detectors
at feasible speed. But they are not good at detect-
ing small objects because feature maps for detecting
small objects do not have enough features.
3 METHODS
This section explains proposed FSSSD for vehicle
detection in the surveillance system and its train-
ing strategy. After that, we describe dataset-specific
model details.
3.1 Fixed Scales SSD (FSSSD)
The proposed FSSSD is based on SSD frame-
work(Liu et al., 2016). we accept the concepts; multi-
scale feature maps, default boxes, convolutional pre-
dictors, and scales. The main modifications are a
high-resolution input, a lightweight backbone for fast
processing, prediction blocks(Lee et al., 2017) to en-
rich the features, and fixed scales for fast training.
3.1.1 Use High-resolution Images for Small
Object Detection
Most one-stage methods use the small input size, i.e.,
300 × 300 or 512 × 512. Because the resolution of
surveillance videos is larger than resized resolution,
resizing the image is required before the detecting
FSSSD: Fixed Scale SSD for Vehicle Detection
337

Table 1: Comparison between relative and fixed scales.
Input size
1st source
1st scale in SSD 1st scale in FSSSD
feature map size
400 × 400 50 × 50 (f ) 40 × 40 (0.1) 40 × 40
960 × 540 120 × 68 (f
0
) 96 × 54 (0.1) 40 × 40
process. It aggravates the performance of the one-
stage detectors on small objects. To solve the issue,
we use high-resolution images as input.
3.1.2 Lightweight Backbone
Although high-resolution inputs improve perfor-
mance on detecting small objects, it makes the de-
tector slows down significantly as the number of pre-
dictions increases in proportion to the input size.
To solve this, we use a lightweight network for the
backbone network to reduce the number of computa-
tions and not to lose performance. We employ Shuf-
fleNetV2 for the backbone of FSSSD since it is faster
and more accurate than other lightweight networks.
Among the variances, we apply ShuffleNetV2 1x in
consideration of speed and accuracy tradeoff.
3.1.3 Prediction Blocks
Another reason for low performance of small ob-
ject detection is that the feature map do not contain
enough features for detecting objects. To overcome
the weakness, we apply the prediction blocks(Lee
et al., 2017) before passing predicting convolution fil-
ters as Figure 1. Prediction blocks enrich features in
feature maps and provide larger receptive fields. With
large receptive fields, the feature maps contain more
contextual information. As shown in Hu et al.(Hu
and Ramanan, 2017), contextual information is very
helpful for detecting small objects. For this reason,
FSSSD can achieve better results than other one-stage
detectors. The structure of prediction Block is shown
in Figure 2.
Figure 2: Prediction Block.
3.1.4 Fixed Scales for Reducing Training Time
It is trivial that training takes a long time because of
the big size of the input. In order to reduce long train-
ing time, we use small size of cropped patches in-
stead of original size of input for training. To make
this work properly, we use fixed scales instead of rel-
ative scales. The scales are very important in SSD
framework because the scale information which is
contained in the feature maps depends on the scales.
Since SSD uses relative scales, the scale values are
changed when the input size is changed, as shown
in Table 1. If a 960 × 540 resolution image passes
SSD model which is trained with 400×400 resolution
samples, the predictions are inaccurate because of the
scale difference between f and f
0
. However, FSSSD
can perform correct predictions because of the fixed
scale, even if the input size is changed.
Using fixed scales has a risk: the objects which
are bigger than the largest scale can not be detected.
Therefore, fixed scales and the size of the patches
should be determined by considering the scale of the
objects. In the surveillance system, most vehicles are
small since the cameras are located in high places
such as over the traffic lights or signs. So we assumed
that every object is smaller than half the size of the
image. According to the assumption, we set the size
of patches as 400 × 400 for input size of 960 × 540
and the fixed scales adapted to the patch size.
3.1.5 Auxiliary Network for Changing Input
Size Freely
The auxiliary network in SSD is designed using the
fixed input size. Especially, the feature maps close
to head are resized by using convolution filters with-
out strides. This way do not work as intended when
the input size is changed. For example, the 3 × 3 fea-
ture map becomes 1 ×1 feature map through the 3×3
convolution filters without padding. The width and
height of the feature map are reduced by one-third.
However, the 5 × 5 feature map becomes 3 × 3 fea-
ture map through the same convolution filters. The
size is not intended, so the prediction results would
be inaccurate. As we need to change the input size,
we design the auxiliary network taking these issues
into account. If it is necessary to reduce the size of a
feature map, we only use strides of convolution filters.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
338

3.2 Training
Since FSSSD is based on SSD, most of the features
such as matching strategy, training objects, etc. are
the same.
3.2.1 Dataset
We use UA-DETRAC(Wen et al., 2015) taken by
surveillance cameras for 10 hours with the 960 × 540
resolution. Since the dataset consists of the images
of 24 different locations and contains 1.21 million
labeled bounding boxes with four vehicle types(car,
van, bus, and other), it is an optimized dataset for
experimenting with vehicle detection. According to
Wen et al. (Wen et al., 2015), most objects in the
dataset are smaller than 300 ×300. Therefore, the size
of patches, 400×400, is appropriate to cover all kinds
of scales.
The evaluation of UA-DETRAC uses the
AP
IOU=0.7
metric. A feature of the evaluation is that
the predicting the type of vehicles is not included in
the metric. Although the type of vehicles does not
affect the evaluation score, increasing the number of
categories helps improve the performance. So FSSSD
uses the type information for accurate detection.
There are 60 sequences for training, and 40 se-
quences for testing. Because there is no dataset
for validation, 10 sequences were randomly selected
from the training set and used as a validation set.
3.2.2 Data Augmentations
Each training patch is randomly sampled by following
Algorithm 1. After the sampling step, each sampled
patch is horizontally flipped with a probability of 0.5
after some photo-metric distortions.
3.2.3 Multi-scale Feature Maps and Scales
Multi-scale feature maps are the most important fea-
ture in the SSD framework for detecting objects of
various sizes. The feature maps close to the bottom
are used to detect small objects, whereas the feature
maps close to the head are used to detect big objects.
Considering the input size, 400 × 400, we selected 7
multi-scale feature maps, two of them from the back-
bone and the others from the auxiliary network. For
each feature map f
k
is a pair with a fixed scale s
k
.
Similar to SSD, the smallest scale s
1
is set as 40, the
0.1 of the input size, and the largest scale s
7
is set
as 360, the 0.9 of the input size. The scales of other
feature maps are computed as:
s
k
= s
1
+
s
m
− s
1
m − 1
(k − 1), k ∈ [1, m] (1)
Algorithm 1: Data Augmenting: Get a patch of a specific
size.
Input I (images tensor), L (labels tensor), size (in-
put size)
Output I
0
, L
0
n ← 1
FLAG ← 0
while FLAG = 0 do
rand ← randomly select among 0.1, 0.3, 0.5, 0.7,
0.9
I
tmp
, L
tmp
← RandomCrop(I, L, size)
if Overlap(L, L
tmp
) > rand then
I
0
, L
0
← I
tmp
, L
tmp
FLAG ← 1
else
if n > 50 then
I
0
, L
0
← Resize(I, L, size)
FLAG ← 1
end if
end if
n ← n + 1
end while
m is the number of multi-scale feature maps and m = 7
for FSSSD.
3.2.4 Default Boxes
Each convolution predictor predicts the confidences
of all categories (classification) and the locations by
x, y, width, height (localization). Default boxes have
several default shapes to help with the localization.
Each feature maps have different default box shapes,
also called as aspect ratios. The 1st, 6th, and 7th fea-
ture maps have 3 aspect ratios; {1,2,
1
2
} and the other
feature maps have 5 aspect ratios; {1, 2, 3,
1
2
,
1
3
}.
4 EXPERIMENTS
We used PyTorch (Paszke et al., 2017) for imple-
menting the networks. The backbone network, Shuf-
fleNetV2, was pre-trained on the ILSVRC CLS-LOC
dataset(Russakovsky et al., 2015). We add batch nor-
malization layers to all convolution layers in the aux-
iliary network because batch normalization helps sta-
ble optimization, as pointed out in (Santurkar et al.,
2018). We fine-tuned FSSSD using SGD optimizer
with batch size 32, initial learning rate 1e-3, momen-
tum 0.9, and weight decay 5e-4. The learning rate
was reduced by one-tenth twice, 150,000 iterations
and 180,000 iterations. We trained on a 1080ti GPU,
Intel(R) Xeon(R) CPU E5-2620 v4 @ 2.10GHz.
FSSSD: Fixed Scale SSD for Vehicle Detection
339
Table 2: UA-DETRAC test benchmark results.
Method
AP(%)
FPS
full easy medium hard cloudy night rainy sunny
Two-stage methods
(Girshick et al., 2014) 49.0 59.3 54.1 39.5 59.7 39.3 39.1 67.5 0.1
(Ren et al., 2015) 58.5 82.8 63.1 44.3 66.3 69.9 45.2 62.3 11.1
(Wang et al., 2017) 68.0 89.7 73.1 53.6 72.4 73.9 53.4 83.7 9.1
(Dai et al., 2016) 69.9 93.3 75.7 54.3 74.4 75.1 56.2 84.1 6
One-stage methods
(Redmon and Farhadi, 2017) 57.7 83.3 62.3 42.4 58.0 64.5 47.8 69.8 -
FSSSD 63.7 83.5 68.2 51.0 72.6 62.0 50.5 77.5 16.7
FSSSD-fast 60.5 80.4 65.5 47.4 67.9 59.5 47.9 76.0 31.7
Finally, we achieved 63.7% AP at 16.7 FPS on the
UA-DETRAC benchmark. Table 2 summarizes the
comparison with the baseline results. The result of
FSSSD is better than all one-stage detectors, such as
YOLO2(Redmon and Farhadi, 2017), and even Faster
R-CNN. Although R-FCN(Dai et al., 2016) shows
better accuracy, the speed of FSSSD is 2.8 times faster
than R-FCN.
4.1 Necessary of Prediction Blocks
First, we studied the effect of the prediction blocks.
And we also studied whether the batch normalization
is important or not. When batch normalization was
not applied, the model did not converge. We also
tested with a smaller learning rate, 1e-4, the model
still diverge so we could not measure the results. So
we concluded that the batch normalization is essen-
tial to train models. We also tested the model without
the prediction blocks. The accuracy rate was 55.3%,
which is 7.6% lower than FSSSD. It is clearly shown
in Figure 4.
Table 3: Effects of Batchnorm and Prediction Blocks.
FSSSD
Use Batchnorm X X
Prediction Blocks X
UA-DETRAC AP NaN 55.3% 63.7%
This huge difference is due to the lightweight
backbone. VGG16(Simonyan and Zisserman, 2014),
the backbone of SSD, has 5% higher top-1 accu-
racy than ShuffleNetV2 1x in ILSVRC. Therefore
we know the feature maps from ShuffleNetV2 do
not have enough features to classify images. Al-
though there are not sufficient features in the feature
maps, FSSSD showed good result with the prediction
blocks, which is shown in this study.
4.2 Training Speed
We used fixed scales to train the model faster. To de-
termine the degree of acceleration, we measured the
average time taken for training. When we experi-
mented with the same environment except for the in-
put size, the speed of training using the small patches
was 0.2748 sec/batch and the speed of training with
the original size patches was 0.4460 sec/batch. The
training speed using the small patches is about 1.63
times faster, which makes the difference in total train-
ing time about 9.51h.
4.3 How to Speed up FSSSD?
The speed of FSSSD shows 16.7 FPS, which is not
enough to be called real-time. But there are various
ways to speed up the model.
4.3.1 Reduce the Number of Categories
The first way to speed up FSSSD is by using only
one category. We used category information as men-
tioned above Sec. 3.2.1. There are 49054 predictions
for a class with 960 × 540 resolution of the input.
Merging categories, that is, eliminating the three cate-
gories, has the advantage of speed as it reduces about
150k predictions. We call the model with one cate-
gory as FSSSD-fast. It showed a little low accuracy
than FSSSD, but the processing speed has doubled.
FSSSD-fast is a meaningful model since the model is
the fastest detector in UA-DETRAC benchmarks.
4.3.2 Discard Unnecessary Region
As with the training stage, FSSSD is capable of freely
changing the size of the input. Therefore, if we know
the unnecessary area of the image, removing the re-
gion is possible. Since changing the input size does
not change any parameters of the model, the detection
performance remains the same as shown in Figure 3.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
340
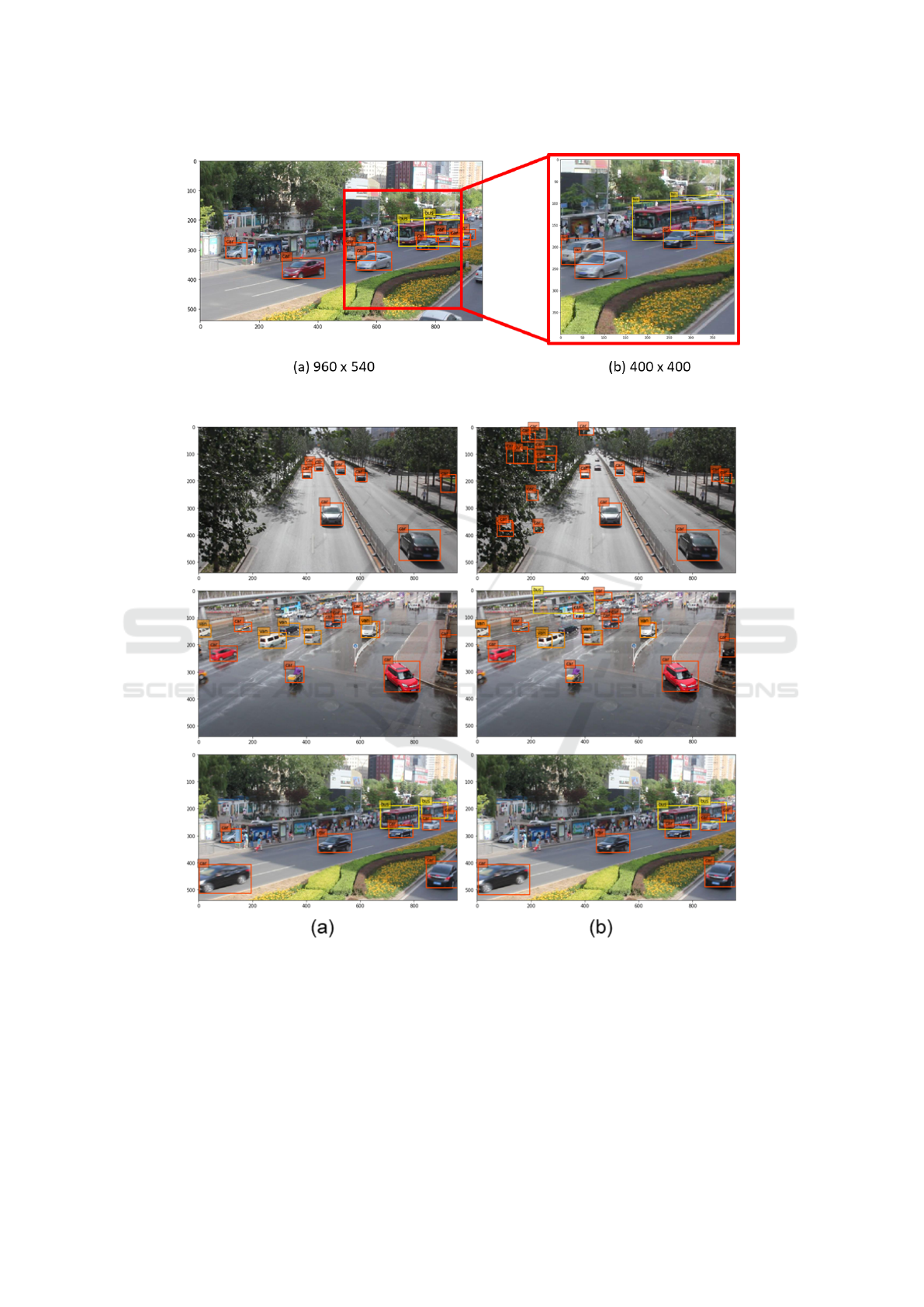
Figure 3: Detection results of FSSSD with input size (a) 960 × 540 and (b) 400 × 400.
Figure 4: Detection examples on the UA-DETRAC test dataset: (a) with prediction blocks and (b) without prediction blocks.
With 400 × 400 resolution of the input, the speed of
FSSSD is 32.1 FPS, which is enough to use in real-
time vehicle detection.
5 CONCLUSIONS
In this paper, we propose an efficient one-stage detec-
tor, named as FSSSD, for real-time vehicle detection
in the surveillance system. We use high-resolution
images to detect small vehicles, the lightweight back-
FSSSD: Fixed Scale SSD for Vehicle Detection
341

bone to reduce execution time and the prediction
blocks to enrich the source feature maps. By com-
bining them, FSSSD runs at 16.7 FPS, which is faster
than any two-stage detectors and achieves 63.7% AP,
which is the highest one among all one-stage detec-
tors.
ACKNOWLEDGEMENTS
This work was partly supported by Institute of Infor-
mation & Communications Technology Planning &
Evaluation(IITP) grant funded by the Korea govern-
ment(MSIT) (No.2014-3-00077, AI National Strat-
egy Project) and the National Research Foundation
of Korea (NRF) grant funded by the Korea govern-
ment(MSIT) (No. 2019R1A2C2087489).
REFERENCES
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-FCN: object de-
tection via region-based fully convolutional networks.
CoRR, abs/1605.06409.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the 2015
IEEE International Conference on Computer Vision
(ICCV), ICCV ’15, pages 1440–1448, Washington,
DC, USA. IEEE Computer Society.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
2014 IEEE Conference on Computer Vision and Pat-
tern Recognition, CVPR ’14, pages 580–587, Wash-
ington, DC, USA. IEEE Computer Society.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Hu, P. and Ramanan, D. (2017). Finding tiny faces. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 951–959.
Lee, K., Choi, J., Jeong, J., and Kwak, N. (2017). Resid-
ual features and unified prediction network for single
stage detection. CoRR, abs/1707.05031.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Ma, N., Zhang, X., Zheng, H.-T., and Sun, J. (2018). Shuf-
flenet v2: Practical guidelines for efficient cnn archi-
tecture design. In Proceedings of the European Con-
ference on Computer Vision (ECCV), pages 116–131.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in Py-
Torch. In NIPS Autodiff Workshop.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2015). You only look once: Unified, real-time object
detection. CoRR, abs/1506.02640.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7263–
7271.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Cortes, C., Lawrence, N. D.,
Lee, D. D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems
28, pages 91–99. Curran Associates, Inc.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Santurkar, S., Tsipras, D., Ilyas, A., and Madry, A. (2018).
How does batch normalization help optimization?(no,
it is not about internal covariate shift). arXiv preprint
arXiv:1805.11604.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Uijlings, J., van de Sande, K., Gevers, T., and Smeulders,
A. (2013). Selective search for object recognition. In-
ternational Journal of Computer Vision.
Wang, L., Lu, Y., Wang, H., Zheng, Y., Ye, H., and Xue,
X. (2017). Evolving boxes for fast vehicle detection.
CoRR, abs/1702.00254.
Wen, L., Du, D., Cai, Z., Lei, Z., Chang, M., Qi, H., Lim,
J., Yang, M., and Lyu, S. (2015). UA-DETRAC: A
new benchmark and protocol for multi-object detec-
tion and tracking. arXiv CoRR, abs/1511.04136.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
342
