
Improving Face Recognition Methods based on POEM Features
Ladislav Lenc
1,2
and Pavel Kr´al
1,2
1
Dept. of Computer Science & Engineering, Faculty of Applied Sciences, University of West Bohemia,
Plzeˇn, Czech Republic
2
NTIS - New Technologies for the Information Society, Faculty of Applied Sciences, University of West Bohemia,
Plzeˇn, Czech Republic
Keywords:
POEM, Face Recognition, Local Features, UFI.
Abstract:
POEM descriptors has been successfully used for face recognition. The usual way how the descriptor is
utilized consists in constructing POEM features in the rectangular non-overlapping regions covering the whole
image. The features created in the regions are then concatenated into one long vector representing the face. We
propose an enhancement of this method using automatic key-point identification strategies. In our approach,
the image features are created in the detected key-points. We also employ a more complex matching procedure
that compares the features individually. This method is efficient particularly when the number of training
samples is small and therefore neural network based methods fail, because they do not have enough training
data. The proposed approach is evaluated on three standard face corpora. We also study the influence of
several parameters of the method on the overall performance. The obtained results show that the combination
of POEM features with the automatic point identification and a more sophisticated matching algorithm brings
significant improvement over the baseline method.
1 INTRODUCTION
Facial recognition is an intensively studied research
field that finds its use in many practical applications.
It is also one of the most useful biometric identifica-
tion methods. There are many successful approaches
based on local features that solve the face recognition
problem.
This work concentrates on the patterns of oriented
edge magnitudes (POEM) descriptors. It has been
proven that POEM has a great ability to capture im-
portant information and it was successfully used for
face recognition (Vu et al., 2012; Lenc, 2016). Sim-
ilarly as other local descriptors, such as local binary
patterns (LBP) and others, image representations are
usually constructed by a concatenation of histograms
of POEM values computed in rectangular image re-
gions. This concept is known as a histogram sequence
(HS). A significant improvement of the HS was pro-
posed in (Lenc and Kr´al, 2016)In this approach, LBP
features are created in automatically detected points
and a more sophisticated matching algorithm is used.
The results of this approach show an improvement
over the original methods using LBP and HS.
In this work, we propose a novel face recogni-
tion method which uses automatically detected key-
points together with POEM features. We also aim at a
more detailed evaluation of the influence of some im-
portant parameters of the key-point detection method.
Compared to the original key-point detection method
we employ also oriented FAST and rotated BRIEF
(ORB) key-point detection algorithm.
We also evaluate several algorithms for key-point
reduction. Some key-point detectors tend to find too
many key-points which brings redundancy and in-
creased computational costs. It is thus beneficial to
use algorithms that can reduce the number of key-
points while preserving the informative value of the
key-point set. Another contribution of this work is
the introduction of a new key-point reduction scheme.
The proposed approach is efficient particularly when
the number of training samples is small and therefore
methods based on neural nets fail because of insuffi-
cient amount of training data.
The method is evaluated on three standard face
corpora, namely AR, UFI and LFW. AR (Martinez
and Benavente, 1998) database represents a well-
controlled dataset, while UFI (Lenc and Kr´al, 2015)
and LFW (Huang et al., 2007) corpora are much more
challenging because they contain real-world images
with few training examples.
The rest of the paper is organized as follows. The
538
Lenc, L. and Král, P.
Improving Face Recognition Methods based on POEM Features.
DOI: 10.5220/0008950305380545
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 538-545
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

following section describes the relevant face recog-
nition methods. Section 3 details the proposed ap-
proach. Section 4 presents the corpora used for evalu-
ation and the following section presents experimental
results realized on these data. The last section con-
cludes the paper and proposes some future research
directions.
2 RELATED WORK
The LBP operator was originally utilized for texture
classification in (Ojala et al., 1994). It is a variant
of the texture unit (Wang and He, 1990). Its compu-
tation is based on a small local neighbourhood of a
given pixel. By comparing the central pixel with its
8 neighbouring ones we create an 8 bit code repre-
senting the pixel. The bits in the code are set to 1 if
the values of the given neighbouring pixels are greater
than the value of the central one. The rest of the bits
is set to 0.
The popularity of face recognition methods based
on local descriptors has begun mainly due to the work
of Ahonen et al. (Ahonen et al., 2004; Ahonen et al.,
2006). It has been proven that these simple descrip-
tors, initially used for texture classification, are very
useful also in the face recognition field. This method
has introduced the histogram sequence (HS) represen-
tation of face images. The utilization of HS ensures
that histograms computed in corresponding parts of
two face images are compared. The reduction of
possible codes using only uniform patterns brought
a speed-up of the method while preserving very good
recognition accuracy.
A plethora of various, more or less sophisticated,
extensions of LBP was proposed in the following
years. We can mention e.g. local ternary patterns
(LTP) (Tan and Triggs, 2010), dynamic threshold lo-
cal binary patterns (DTLBP) (Li et al., 2012) and
completed local binary patterns (CLBP) (Guo et al.,
2010). All of these methods bring some small im-
provements over the basic LBP. The main advantage
is a better handling of lower quality images that are
affected by varying lighting conditions and noise.
Three- and Four-patch LBP variations were pro-
posed in (Wolf et al., 2008). The codes are con-
structed by comparison of three or four patches
respectively. The more sophisticated computation
brings better robustness. The algorithm works very
well on face recognition using the LFW dataset.
Local derivative patterns (LDP) differ in utilizing
features of higher orders than LBP. Again, the main
advantage over LBP is better accuracy in the case of
challenging illumination conditions. A great success
was made by the authors of the POEM descriptor (Vu
et al., 2012). POEM based features outperformed
many other image descriptors and succeeded also in
the face verification task.
Further improvements of the basic descriptor
based methods were proposed in (Lenc and Kr´al,
2014) and (Lenc and Kr´al, 2016). The main nov-
elty consists in using automatically detected points
for the feature construction. There is also an im-
provedmatching algorithm that allows reaching better
accuracies in comparison with basic methods using
HS. Another possible improvement lies in weighting.
Each region in the face can have a different weight
which again increases the accuracy. An approach uti-
lizing genetic algorithm to set-up the weights was pro-
posed in (Lenc, 2016).
A thorough description of more algorithms that
were proposed is beyond the scope of this pa-
per, therefore, for the further reading please refer
to (Nanni et al., 2012).
3 POEM-BASED FACE
RECOGNITION
The first step in the proposed algorithm is the key-
point identification. Two methods for this tasks are
described in Sections 3.1 an 3.2. The second step is
the key-point reduction described in Section 3.3. Fol-
lows the description of the POEM algorithm in Sec-
tion 3.4. The final building block of the processing
pipeline is the image matching that is detailed in Sec-
tion 3.5.
3.1 Gabor Wavelet Key-point
Identification
We use the Gabor wavelets based method described
in (Lenc and Kr´al, 2014). Gabor filters utilized in this
work are computed using eqs. (1) and (2) which de-
scribe the real and the imaginary part of the wavelet
respectively (computed in point (r, c)).
g(r, c;λ, θ, ψ, σ, γ) = exp(−
´r+ γ
2
´c
2
2σ
2
)cos(2π
´r
λ
+ ψ)
(1)
g(r, c;λ, θ, ψ, σ, γ) = exp(−
´r+ γ
2
´c
2
2σ
2
)sin(2π
´r
λ
+ ψ)
(2)
where ´r = rcosθ + csinθ, ´c = −rsinθ + ccosθ,
λ is the wavelength of the cosine factor, θ represents
Improving Face Recognition Methods based on POEM Features
539

the orientation of the filter and ψ is a phase offset,
σ and γ are parameters of the Gaussian envelope,
σ is the standard deviation of the Gaussian and γ
defines the ellipticity (aspect ratio) of the function.
The magnitude is then computed from the real and
imaginary parts.
We use a set of 40 Gabor filters that are applied
on the face image. The filter responses are scanned
using a square sliding window W of the size w × w.
The window centre (r
0
, c
0
) is considered to be a key-
point iff:
R
j
(r
0
, c
0
) = max
(r,c)∈W
R
j
(r, c) (3)
R
j
(r
0
, c
0
) >
1
wi∗ hi
wi
∑
r=1
hi
∑
c=1
R
j
(r, c) (4)
where j = 1, ..., N
G
(N
G
is the number of Gabor
filters) and wi and hi are image width and height
respectively.
We will refer as REAL the method which uses only
the real part and MAGNITUDE the one that computes
the magnitude from the real and the imaginary parts.
3.2 ORB Key-point Identification
ORB (Rublee et al., 2011) method was proposed as
an alternative to the patented SIFT and SURF algo-
rithms. It provides key-points that are computed us-
ing the FAST algorithm. BRIEF binary descriptors
are used to create robust features that are successfully
used for image matching and other applications. We
use only the key-pointdetection part of this algorithm.
The FAST algorithm (Rosten and Drummond,
2006) detects corner key-points. Its main strength is
its speed and it is thus often used in real-time appli-
cations. FAST uses a circle with 3 pixel radius and
centre in the candidate key-point. The point P with
the intensity I
P
is a candidate if the intensities of N
contiguous points on the circle are all:
1. greater then I
P
+ t
2. smaller then I
P
− t
where t is a threshold. Parameter N and threshold
t influence the number of resulting key-point candi-
dates. N is usually set to 12. The ORB algorithm
additionally uses Harris corner filter to select the best
candidates.
3.3 Key-point Reduction
The key-points detected by one of the described al-
gorithms can be used directly without any reduction.
Unfortunately, the resulting number of key-points and
features is very high. It has been shown (Lenc and
Kr´al, 2014) that this point number can be significantly
reduced using clustering with no significant informa-
tion loss. Therefore, we evaluate three ways how to
construct the resulting points. All of them are based
on the K-means clustering. We refer as key-points the
points identified by the particular key-point detection
algorithm. Feature points are the points where fea-
tures are created.
3.3.1 Face Specific Position
This method constructs the feature points for each im-
age independently. The set of key-points extracted by
the key-point identification algorithm is used as the
input of the clustering algorithm. The cluster centres
are then directly used as the feature points. We will
refer this method as FS-POEM.
3.3.2 Person Specific Position
The second method takes all images of one person
and puts the key-points extracted from all images to-
gether. The points are then clustered and the cluster
centres are used as the feature points. While testing,
we extract key-points from the unknown image and
cluster it to obtain the feature points. This method
will be referred as PS-POEM.
3.3.3 Global Position
The global position method uses the same set of fea-
ture points for each image. A representative subset
of the image gallery is used for key-point extraction.
All resulting points are clustered and the centres are
again used as the feature points. The points are thus
the same for all images. No clustering is performed
for the unknown images. Only the features are cre-
ated in the determined feature points. We will denote
this method as GL-POEM.
3.4 POEM Features
POEM descriptor was proposed in (Vu et al., 2012).
It is based on gradients computed in each image
pixel. The gradients are usually computed by one of
the well-known edge detection convolution operators
such as Sobel or Scharr. The approximation using
these operators allows computing gradients in both x
and y direction and subsequently compute the gradi-
ent magnitude and orientation.
The gradient orientations are then discretized. The
usual number of orientations proposed in the origi-
nal paper is 3. It is denoted d. Vector of the length
d is thus used as a representation of each pixel. It
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
540
is a histogram of gradient values in a small square
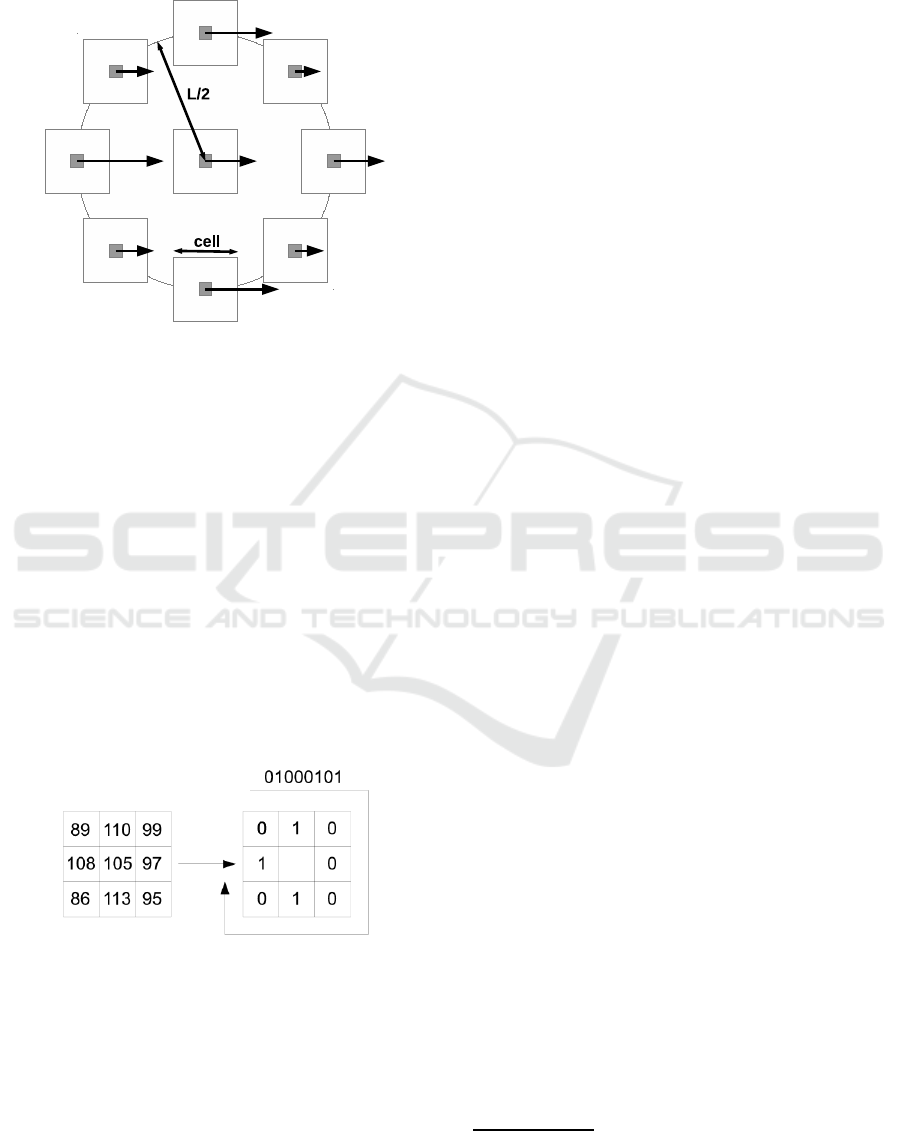
neighbourhood of a given pixel called cell. Figure 1
depicts the meaning of cell and block terms.
Figure 1: Computation of POEM descriptor. Squares
around the pixels are called cells while the surroundings
with diameter L is called block. Arrows represent the ac-
cumulated gradients.
The final encoding is similar to LBP as depicted in
Figure 2. It is done in a round neighbourhoodwith di-
ameter L called block. The algorithm assigns either 0
or 1 value to the 8 neighbouring pixels by Equation 5.
B
i
=
0 if g
i
< g
c
1 if g
i
≥ g
c
(5)
where B
i
is the binary value assigned to the
neighbouring pixel i ∈ {1, .., 8}, g
i
denotes the
gray-level value of the neighbouring pixel i and g
c
is
the gray-level value of the central pixel. The resulting
values are then concatenated into an 8 bit number. Its
decimal representation is used to create the feature
vector.
Figure 2: Computation of the final POEM value.
It is computed for each gradient orientation and
thus the descriptor is d times longer than in the case
of LBP.
3.5 Matching Algorithm
In the proposed algorithm we do not concatenate the
feature vectors. Instead, the distance of the feature
sets is computed using the algorithm utilized in (Lenc
and Kr´al, 2016).
The feature vectors are compared using the his-
togram intersection (HI). The advantage of this
method is its simplicity and fast computation. More-
over, in our preliminary experiments it outperformed
some more sophisticated methods such as χ
2
statistic
in terms of accuracy. HI computation is described by
eq. (6).
HI( f, r) = 1−
∑
i
min( f
i
, r
i
) (6)
where i is the number of histogram bins. This
form is interpreted as a distance measure. 0 value thus
means the same histograms.
The distance of two face representations is com-
puted by eq. (7).
sim(F, R) =
∑
f
i
min
r
j
∈N( f
i
)
(HI( f
i
, r
j
)) (7)
where N( f
i
) is the neighbourhood of the feature
f
i
defined by the distanceThreshold that specifies
the maximum distance within that the features are
compared. It means that for each feature of the face
F we find the closest one within the neighbourhood
N( f
i
) from the face R. The distance of the two faces
is computed as a sum of these minimum distances.
The recognized face
ˆ
F is given by the following
equation:
ˆ
F = argmin
R
(sim(F, R)) (8)
4 CORPORA
4.1 AR Face Database
AR Face Database
1
(Martinez and Benavente,
1998) was created at the Univerzitat Auton`oma de
Barcelona. This database contains more than 4,000
colour images of 126 individuals. The images are
stored in a raw format and their size is 768× 576 pix-
els. The individuals are captured under significantly
different lighting conditions and with varying expres-
sions. Another characteristic is a possible presence of
glasses or scarf.
4.2 Labeled Faces in the Wild
We use the cropped version of the well-known La-
beled faces in the wild (LFW) dataset (Huang et al.,
1
http://www2.ece.ohio-state.edu/ aleix/ARdatabase.
html
Improving Face Recognition Methods based on POEM Features
541
2007). This version was first utilized in (Sanderson
and Lovell, 2009). The main reason for the cropping
is the presence of a background in the original images
that may add information and improve performance
in some cases. The preprocessing should ensure more
fair conditions for testing.
The extraction method places a bounding box
around the faces and resizes the resulting area to
64 × 64 pixels. The bounding box is placed to the
same location in every image.
We use the identification scenario proposed in (Xu
et al., 2014). It uses a subset of 86 people with 11 to
20 images per person. 7 images of each person are
used for the gallery and the rest is used as the probe
set. The total numbers of images are 602 and 649 for
gallery and probe set respectively.
4.3 Unconstrained Facial Images
The Unconstrained facial images (UFI) dataset was
proposed in (Lenc and Kr´al, 2015). It is a real-world
database created from photographs acquired by re-
porters of a news agency. It thus shows significant
variances in the image quality, face orientation, face
occlusion etc. The database is designated for the iden-
tification task. It comes with two image sets. The
Cropped images dataset contains preprocessed faces
extracted from photographs while the Large images
includes a variable amount of background. We uti-
lize the cropped version while the other partition is
intended to be used with complete face recognition
systems including the face localization stage.
The images have resolution of 128 × 128 pixels.
The total number of individuals is 605. In average
7.1 images of each person are in the gallery set. The
total number of gallery images is 4316. The probe set
contains just one image for every individual.
5 EXPERIMENTS
The first experiment was carried out to compare the
key-point identification methods. No clustering is
performed in this case and the detected key-points are
directly used as the feature points. The size of the
sliding window is set to 25 according to (Lenc and
Kr´al, 2016). Table 1 shows the comparison of the
methods on all utilized datasets. We report the ac-
curacy and also the number of identified key-points.
The best results are obtained using the real part of
Gabor wavelets. It is partly due to the larger number
of points that are found by this method. On the other
hand, ORB achieved the worst results. It is evident
mainly on LFW where it also finds very low number
of key-points. A possible reason for the lower number
of key-poits is lower resolution of the images.
Table 2 compares 3 key-point identification meth-
ods with two cluster counts, namely 50 and 100. All
key-point reduction types are examined.
The results show that both Gabor wavelet based
methods have significantly better accuracy than ORB.
The real part of Gabor wavelet is mostly sufficient
and achieves slightly better accuracies than magni-
tude. Moreover, it is computationally less expensive.
Based on these experiments, we choose the real part
of Gabor wavelet as the best approach and use it in all
following experiments.
The next experimentperforms a more fine-grained
evaluation of how the number of clusters influences
the overall accuracy. The three utilized datasets are
tested with all three key-point reduction methods.
0
20
40
60
80
100
20 40 60 80 100 120 140
Recognition accuracy
Clusters
Face specific
Person specific
Global
Figure 3: Recognition accuracy in dependence on cluster
count evaluated on AR database.
Figure 3 shows the results for the AR database.
It is obvious that this database is relatively easy and
even a very low number of feature points is enough
to reach high accuracy. Cluster counts higher than
40 are sufficient for all key-point reduction method.
The global position approach allows using even lower
numbers. The highest accuracy of 99.4% is reached
using the Global position. However, the results of the
two other methods are very close and both are higher
than 99%.
Figure 4 reports the results for the challenging
LFW database. In this case, the minimal number of
clusters is around 60. The recognition accuracy then
slightly increases. The highest accuracy of 56.1% is
obtained with person specific position and 120 clus-
ters.
The curves for the UFI dataset depicted in Fig-
ure 5 have a very similar shape as in the case of the
LFW. The best result is 74.2% for the Global Position
method with 135 clusters.
Table 3 brings the comparison of our results with
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
542
Table 1: Comparison of different key-point determination methods.
Dataset UFI AR LFW
Method ACC (%) Points ACC (%) Points ACC (%) Points
REAL 72.2 330 98.9 413 54.7 352
MAGNITUDE 71.4 275 98.7 333 53.2 290
ORB 68.3 271 95.9 253 41.1 83
Table 2: Comparison of different cluster counts.
Key-point reduction Face Specific Person Specific Global
Dataset UFI AR LFW UFI AR LFW UFI AR LFW
Method/clusters ACC (%) ACC (%) ACC (%)
REAL/50 71.1 99.1 52.5 69.1 98.6 51.8 71.7 99.1 51.6
REAL/100 71.7 99.1 54.9 72.4 98.9 55.3 73.4 99.3 53.8
MAGNITUDE/50 71.1 98.7 54.5 65.3 96.3 46.1 71.6 99.1 50.4
MAGNITUDE/100 71.7 98.9 54.4 71.7 98.9 54.2 73.1 99.1 53.9
ORB/50 61.7 94.7 40.8 54.5 92.3 34.1 70.4 98.6 46.8
ORB/100 64.5 95.1 41.0 64.3 95.6 39.0 71.7 98.7 50.5
0
20
40
60
80
100
20 40 60 80 100 120 140
Recognition accuracy
Clusters
Face specific
Person specific
Global
Figure 4: Recognition accuracy in dependence on cluster
count evaluated on LFW database.
0
20
40
60
80
100
20 40 60 80 100 120 140
Recognition accuracy
Clusters
Face specific
Person specific
Global
Figure 5: Recognition accuracy in dependence on cluster
count evaluated on UFI database.
previously reported LBP based methods. We used the
LBP
8,2
variant. All methods are evaluated with 100
clusters to allow fair comparison.
Table 3: Accuracy (in %) of the proposed methods in com-
parison with LBP-based approaches.
Method / Dataset UFI AR LFW
FS-LBP 64.0 98.9 52.1
PS-LBP 63.3 98.7 51.0
GL-LBP 63.0 98.7 51.8
FS-POEM 71.7 99.1 54.9
PS-POEM 72.4 98.9 55.3
GL-POEM 73.4 99.3 53.8
Table 4: Accuracy of the proposed method on the UFI
dataset in comparison with other approaches reported in the
literature.
Method / Dataset ACC (%)
FS-LBP (Lenc and Kr´al, 2016) 63.96
POEM-HS (Lenc, 2016) 65.95
POEM-HS weighted (Lenc, 2016) 68.93
SIFT (Lenc and Kr´al, 2012) 58.68
M-BNCC (Gaston et al., 2017) 74.55
GL-POEM (proposed) 74.20
The comparison indicates that POEM is superior
mainly on the UFI dataset. The results for the AR
database are comparable while the difference on the
LFW dataset is around 3% in average. We can state
that face specific method is superior together with
LBP. However, there are differences in the POEM
based method. In this case, person specific and global
methods perform better than the face specific one.
Table 4 brings a comparison of our best results ob-
tained on the UFI dataset with the results reported in
the literature. The results for FS-LBP and SIFT are re-
computed because the results reported in the literature
were obtained on older versions of the UFI dataset.
Improving Face Recognition Methods based on POEM Features
543

6 CONCLUSION
In this paper we have proposed an extension of the
POEM-based face recognition method. It combines
automatic detection of feature points and a better
matching algorithm with POEM features. We have
also evaluated several aspects of the method and their
influence on the resulting accuracy.
The methods were tested on three standard face
corpora. The results are consistently better than those
of the previously published methods using automat-
ically detected points together with LBP features.
Moreover, we were able to reach state-of-the-art ac-
curacy on the UFI dataset.
One of possible improvements is adding weight-
ing also to this method with dynamic feature points.
Based on the results of weighting together with meth-
ods using HS for face representation, it could bring
further increase of the recognition accuracy.
ACKNOWLEDGEMENTS
This work has been partly supported by the project
LO1506 of the Czech Ministry of Education, Youth
and Sports and by the Cross-border Cooperation Pro-
gram Czech Republic - Free State of Bavaria ETS Ob-
jective 2014-2020 (project no. 211).
REFERENCES
Ahonen, T., Hadid, A., and Pietik¨ainen, M. (2004). Face
recognition with local binary patterns. In Computer
vision-eccv 2004, pages 469–481. Springer.
Ahonen, T., Hadid, A., and Pietikainen, M. (2006). Face
description with local binary patterns: Application to
face recognition. IEEE Transactions on Pattern Anal-
ysis & Machine Intelligence, (12):2037–2041.
Gaston, J., Ming, J., and Crookes, D. (2017). Unconstrained
face identification with multi-scale block-based corre-
lation. pages 1477–1481.
Guo, Z., Zhang, L., and Zhang, D. (2010). A completed
modeling of local binary pattern operator for texture
classification. IEEE Transactions on Image Process-
ing, 19(6):1657–1663.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database
for studying face recognition in unconstrained envi-
ronments. Technical report, Technical Report 07-49,
University of Massachusetts, Amherst.
Lenc, L. (2016). Genetic algorithm for weight optimiza-
tion in descriptor based face recognition methods.
In Proceedings of the 8th International Conference
on Agents and Artificial Intelligence, pages 330–336.
SCITEPRESS-Science and Technology Publications,
Lda.
Lenc, L. and Kr´al, P. (2012). Novel matching methods for
automatic face recognition using sift. In IFIP Inter-
national Conference on Artificial Intelligence Appli-
cations and Innovations, pages 254–263. Springer.
Lenc, L. and Kr´al, P. (2014). Automatically detected feature
positions for lbp based face recognition. In IFIP In-
ternational Conference on Artificial Intelligence Ap-
plications and Innovations, pages 246–255. Springer.
Lenc, L. and Kr´al, P. (2015). Unconstrained Facial Im-
ages: Database for face recognition under real-world
conditions. In 14th Mexican International Conference
on Artificial Intelligence (MICAI 2015), Cuernavaca,
Mexico. Springer.
Lenc, L. and Kr´al, P. (2016). Local binary pattern based
face recognition with automatically detected fidu-
cial points. Integrated Computer-Aided Engineering,
23(2):129–139.
Li, W., Fu, P., and Zhou, L. (2012). Face recognition
method based on dynamic threshold local binary pat-
tern. In Proceedings of the 4th International Confer-
ence on Internet Multimedia Computing and Service,
pages 20–24. ACM.
Martinez, A. and Benavente, R. (1998). The AR Face
Database. Technical report, Univerzitat Auton`oma de
Barcelona.
Nanni, L., Lumini, A., and Brahnam, S. (2012). Survey on
LBP based texturedescriptors for image classification.
Expert Systems with Applications, 39(3):3634–3641.
Ojala, T., Pietikainen, M., and Harwood, D. (1994). Per-
formance evaluation of texture measures with classi-
fication based on kullback discrimination of distribu-
tions. In Pattern Recognition, 1994. Vol. 1-Conference
A: Computer Vision & Image Processing., Proceed-
ings of the 12th IAPR International Conference on,
volume 1, pages 582–585. IEEE.
Rosten, E. and Drummond, T. (2006). Machine learning for
high-speed corner detection. In European conference
on computer vision, pages 430–443. Springer.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: An efficient alternative to sift or surf.
In Computer Vision (ICCV), 2011 IEEE international
conference on, pages 2564–2571. IEEE.
Sanderson, C. and Lovell, B. C. (2009). Multi-region proba-
bilistic histograms for robust and scalable identity in-
ference. In International Conference on Biometrics,
pages 199–208. Springer.
Tan, X. and Triggs, B. (2010). Enhanced local texture fea-
ture sets for face recognition under difficult lighting
conditions. IEEE transactions on image processing,
19(6):1635–1650.
Vu, N.-S., Dee, H. M., and Caplier, A. (2012). Face recogni-
tion using the POEM descriptor. Pattern Recognition,
45(7):2478–2488.
Wang, L. and He, D.-C. (1990). Texture classification us-
ing texture spectrum. Pattern Recognition, 23(8):905–
910.
Wolf, L., Hassner, T., Taigman, Y., et al. (2008). De-
scriptor based methods in the wild. In Workshop
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
544

on Faces in’Real-Life’Images: Detection, Alignment,
and Recognition.
Xu, Y., Fang, X., Li, X., Yang, J., You, J., Liu, H., and Teng,
S. (2014). Data uncertainty in face recognition. IEEE
transactions on cybernetics, 44(10):1950–1961.
Improving Face Recognition Methods based on POEM Features
545
