
Uncertainty-based Out-of-Distribution Classification in
Deep Reinforcement Learning
Andreas Sedlmeier
1
, Thomas Gabor
1
, Thomy Phan
1
, Lenz Belzner
2
and Claudia Linnhoff-Popien
1
1
LMU Munich, Munich, Germany
2
MaibornWolff, Munich, Germany
Keywords:
Uncertainty in AI, Out-of-Distribution Classification, Deep Reinforcement Learning.
Abstract:
Robustness to out-of-distribution (OOD) data is an important goal in building reliable machine learning sys-
tems. As a first step towards a solution, we consider the problem of detecting such data in a value-based deep
reinforcement learning (RL) setting. Modelling this problem as a one-class classification problem, we pro-
pose a framework for uncertainty-based OOD classification: UBOOD. It is based on the effect that an agent’s
epistemic uncertainty is reduced for situations encountered during training (in-distribution), and thus lower
than for unencountered (OOD) situations. Being agnostic towards the approach used for estimating epistemic
uncertainty, combinations with different uncertainty estimation methods, e.g. approximate Bayesian infer-
ence methods or ensembling techniques are possible. Evaluation shows that the framework produces reliable
classification results when combined with ensemble-based estimators, while the combination with concrete
dropout-based estimators fails to reliably detect OOD situations.
1 INTRODUCTION
One of the main impediments to the deployment of
autonomous machine learning systems in the real
world is the difficulty to show that the system will
continue to reliably execute beneficial actions in all
the situations it encounters in production use. One
of the possible reasons for failure is so called out-
of-distribution (OOD) data, i.e. data which deviates
substantially from the data encountered during train-
ing. As the fundamental problem of limited training
data seems unsolvable for most cases, especially in
sequential decision making tasks like reinforcement
learning (RL), a possible first step towards a solu-
tion is to detect and report the occurrence of OOD
data. This can prevent silent and possibly safety crit-
ical failures of the machine learning system (caused
by wrong predictions which lead to the execution of
unfavorable actions), for example by handing control
over to a human supervisor.
Recently, several different approaches were pro-
posed that try to detect OOD samples in classifica-
tion tasks (Hendrycks and Gimpel, 2016; Liang et al.,
2017), or perform anomaly detection via generative
models (Schlegl et al., 2017). While these methods
show promising results in the evaluated classification
tasks, we are not aware of applications to value-based
RL settings where non-stationary regression targets
are present. Thus, our research aims to provide a first
step towards developing and evaluating suitable OOD
detection methods that are applicable to changing en-
vironments in sequential decision making tasks.
We model the OOD-detection problem as a one-
class classification problem with the two classes: in-
distribution and out-of-distribution. Having framed
the problem this way, we propose a framework for
uncertainty-based OOD classification: UBOOD. It
is based on the effect that epistemic uncertainty in
the agent’s chosen actions is reduced for situations
encountered during training (in-distribution), and is
thus lower than for unencountered (OOD) situations.
The framework itself is agnostic towards the approach
used for estimating epistemic uncertainty. Thus, it is
possible to use e.g. approximate Bayesian inference
methods or ensembling techniques.
In order to evaluate the performance of any OOD
classifier in a RL setting, modifiable environments
which can generate OOD samples are needed. Due
to a lack of publicly available RL environments that
allow systematic modification, we developed two dif-
ferent environments: one using a gridworld-style
discrete state-space, the other using a continuous
state-space. Both allow modifications of increasing
strength (and consequently produce OOD samples of
522
Sedlmeier, A., Gabor, T., Phan, T., Belzner, L. and Linnhoff-Popien, C.
Uncertainty-based Out-of-Distribution Classification in Deep Reinforcement Learning.
DOI: 10.5220/0008949905220529
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 522-529
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

increasing strength) after the training process.
We empirically evaluated the performance of the
UBOOD framework with different uncertainty es-
timation methods on these environments. Evalua-
tion results show that the framework produces reli-
able OOD classification results when combined with
ensemble-based estimators, while the combination
with concrete dropout-based estimators fails to cap-
ture increased uncertainty in the OOD situations.
2 BASICS
2.1 Uncertainty Estimation
In the context of this work, we are interested in the
uncertainty of a neural network’s prediction, which in
a value-based deep RL setting is the certainty that an
agent’s chosen action is optimal in the given situation.
Different approaches exist that make it possible to es-
timate this uncertainty. Ensemble techniques for ex-
ample aggregate the predictions of multiple networks,
often trained on different versions of the data, and in-
terpret the variance of the individual predictions as the
uncertainty (Osband et al., 2016; Lakshminarayanan
et al., 2017). These and other methods applicable to
deep neural networks will be presented in more detail
in Section 3.1. Besides the various ways of measuring
uncertainty, it is equally important to differentiate the
different sources of uncertainty.
2.1.1 Aleatoric Uncertainty
Aleatoric uncertainty models the inherent stochastic-
ity in the system, i.e. no amount of data can explain
the observed stochasticity. In other words, the un-
certainty cannot be reduced by capturing more data.
A reason for this might be that certain features that
would be needed to explain the behaviour of the sys-
tem are not part of the collected data. It is also pos-
sible that the uncertainty is a fundamental property of
the measured system, as is the case when dealing with
quantum mechanics. As such, aleatoric uncertainty
cannot be reduced, irrespective of how much data is
collected.
2.1.2 Epistemic Uncertainty
Epistemic uncertainty by contrast arises out of a lack
of sufficient data to exactly infer the underlying sys-
tem’s data generating function. In this case, the fea-
tures available in the data do in principle allow the ex-
planation of the behaviour of the system. Collecting
more data could allow for a correct inference of the
system’s behaviour and consequently the reduction of
the uncertainty.
2.2 Markov Decision Processes
We base our problem formulation on Markov deci-
sion processes (MDPs). MDPs are defined by tuples:
M = hS, A, P , R i. S is a (finite) set of states; s
t
∈ S
being the state of the MDP at time step t. A is the (fi-
nite) set of actions; a
t
∈ A is the action the MDP takes
at step t. P (s
t+1
|s
t
, a
t
) defines the transition probabil-
ity function; a transition occurs by executing action a
t
in state s
t
. The resulting next state s
t+1
is determined
based on P . In this paper we focus on determinis-
tic domains represented by deterministic MDPs, so
P (s
t+1
|s
t
, a
t
) ∈ {0, 1}. Finally, R (s
t
, a
t
) is the scalar
reward; for this paper we assume that R (s
t
, a
t
) ∈ R.
Goal of the problem is to find a policy π : S → A
in the space of all possible policies Π, which maxi-
mizes the expectation of return G
t
at state s
t
over a po-
tentially infinite horizon: G
t
=
∑
∞
k=0
γ
k
· R (s
t+k
, a
t+k
)
where γ ∈ [0, 1] is the discount factor.
2.3 Reinforcement Learning
In order to search the policy space Π, we consider
model-free reinforcement learning (RL). In this set-
ting, an agent interacts with an environment defined
as an MDP M by executing a sequence of actions
a
t
∈ A, t = 0, 1, ... (Watkins, 1989). In the fully ob-
servable case of RL, the agent knows its current state
s
t
and the action space A, but not the effect of execut-
ing a
t
in s
t
, i.e., P (s
t+1
|s
t
, a
t
) and R (s
t
, a
t
). In order
to find the optimal policy π
∗
, we focus on Q-Learning
(Watkins, 1989), a commonly used value-based ap-
proach. It is named for the action-value function
Q
π
: S × A → R, π ∈ Π, which describes the expected
return Q
π
(s
t
, a
t
) when taking action a
t
in state s
t
and
then following policy π for all states s
t+1
, s
t+2
, ... af-
terwards.
The optimal action-value function Q
∗
of policy π
∗
is any action-value function that yields higher accu-
mulated rewards than all other action-value functions,
i.e., Q
∗
(s
t
, a
t
) ≥ Q
π
(s
t
, a
t
) ∀π ∈ Π. Q-Learning aims
to approximate Q
∗
by starting from an initial guess for
Q, which is then updated via
Q(s
t
, a
t
) ← Q(s
t
, a
t
)+
α[r
t
+ γmax
a
Q(s
t+1
, a) − Q(s
t
, a
t
)] (1)
It uses experience samples of the form e
t
=
(s
t
, a
t
, s
t+1
, r
t
), where r
t
is the reward earned at time
step t, i.e., by executing action a
t
when in state s
t
. The
learning rate α is a setup-specific parameter. The set
of all experience samples taken at time steps t
1
, ..., t
m
Uncertainty-based Out-of-Distribution Classification in Deep Reinforcement Learning
523

for some training limit m is called the training set
T = {e
t
1
, ..., e
t
m
}.
The learned action-value function Q converges to
the optimal action-value function Q
∗
, which then im-
plies an optimal policy π
∗
(s
t
) = argmax
a
Q(s
t
, a).
In high-dimensional settings or when learning in
continuous state-spaces, it is common to use pa-
rameterized function approximators like neural net-
works to approximate the action-value function:
Q(s
t
, a
t
;θ) ≈ Q
∗
(s
t
, a
t
) with θ specifying the weights
of the neural network. When using a deep neural
network as the function approximator, this approach
is called deep reinforcement learning. (Mnih et al.,
2015)
3 RELATED WORK
3.1 Uncertainty in Deep Learning
When dealing with uncertainty, a systematic way is
via Bayesian inference. Its combination with neural
networks in the form of Bayesian neural networks is
realised by placing a probability distribution over the
weight-values of the network. As calculating the ex-
act Bayesian posterior quickly becomes computation-
ally intractable for deep models, a popular solution
are approximate inference methods (Graves, 2011;
Hern
´
andez-Lobato et al., 2016; Li and Gal, 2017;
Gal et al., 2017). Another option is the construc-
tion of model ensembles, e.g., based on the idea of
the statistical bootstrap. The resulting distribution of
the ensemble predictions can then be used to approx-
imate the uncertainty (Osband et al., 2016; Lakshmi-
narayanan et al., 2017).
Both approaches have been used for diverse tasks,
e.g. in machine vision (Kendall and Gal, 2017). In
the field of decision making, uncertainty is used to
implicitly guide exploration, e.g by creating an en-
semble of models (Osband et al., 2016), or for learn-
ing safety predictors, e.g. predicting the probability
of a collision (Kahn et al., 2017). Recently, a distri-
butional approach to RL (Bellemare et al., 2017) was
proposed which tries to learn the value distribution of
a RL environment. Although this approach also mod-
els uncertainty, its goal of estimating the distribution
of values is different from the work at hand, which
tries to detect epistemic uncertainty, i.e. uncertainty
in the model itself.
3.2 OOD and Novelty Detection
For the case of low-dimensional feature spaces, OOD
detection (also called novelty detection) is a well-
researched problem. For a survey on the topic, see
e.g. (Pimentel et al., 2014), who distinguish be-
tween probabilistic, distance-based, reconstruction-
based, domain-based and information theoretic meth-
ods. During the last years, several new methods based
on deep neural networks were proposed for high-
dimensional cases, mostly focusing on classification
tasks, e.g. image classification. (Hendrycks and Gim-
pel, 2016) propose a baseline for detecting OOD ex-
amples in neural networks, based on the predicted
class probabilities of a softmax classifier. (Liang
et al., 2017) improve upon this baseline by using tem-
perature scaling and by adding perturbations to the
input. (Li and Gal, 2017) evaluate the performance
of a proposed alpha-divergence-based variational in-
ference technique in an image classification task of
adversarial examples. This can be understood as a
form of OOD detection, as the generated adversar-
ial examples lie outside of the training image mani-
fold and consequently far from the training data. The
authors report increased epistemic uncertainty, con-
firming the viability of their approach for the detec-
tion of adversarial image examples. The basic idea of
this uncertainty-based approach is closely related to
our proposed method, but no evaluation of the perfor-
mance in a RL setting with non-stationary regression
targets was performed. To the best our knowledge,
none of the previously mentioned methods were eval-
uated regarding the epistemic uncertainty detection
performance in a RL setting.
4 UNCERTAINTY-BASED
OUT-OF-DISTRIBUTION
CLASSIFICATION
In this paper we propose UBOOD, an uncertainty-
based OOD-classifier that can be employed in value-
based deep reinforcement learning settings. It is
based on the reducibility of epistemic uncertainty in
the action-value function approximation.
As previously described, epistemic uncertainty
arises out of a lack of sufficient data to exactly infer
the underlying system’s data generating function. As
such, it tends to be higher in areas of low data density.
(Qazaz, 1996), who in turn refers to (Bishop, 1994)
for the initial conjecture, showed that the epistemic
uncertainty σ
epis
(x) is approximately inversely pro-
portional to the density p(x) of the input data, for the
case of generalized linear regression models as well
as multi-layer neural networks: σ
epis
(x) ∝ p
−1
(x)
This also forms the basis of our approach: to use
this inverse relation between epistemic uncertainty
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
524
and data density in order to differentiate in- from out-
of-distribution samples.
We define U
Q
: S × A → R as the epistemic uncer-
tainty function of a given Q-function approximation
Q. If a suitable method for epistemic uncertainty es-
timation for deep neural networks is applied, the pro-
cess of training the agent reduces U
Q
(s, a) for those
state-action tuples (s, a) ∈ I that were used for train-
ing, i.e., there exists a successor state s
0
and a reward
r so that (s, a, s
0
, r) ∈ I . I consequently defines the
set of in-distribution data. By contrast, state-action
tuples that were not encountered during training i.e.
(s, a) 6∈ I define the set of out-of-distribution data O.
The epistemic uncertainty of these state-action tuples
is not reduced during training. Thus, epistemic uncer-
tainty of out-of-distribution data will be higher than
that of in-distribution data: U
Q
(O) > U
Q
(I)
UBOOD directly uses the output of the epistemic
uncertainty function U
Q
as the real-valued classifica-
tion score. As is the case for many one-class clas-
sificators, this real-valued score forms the input of a
threshold-based decision function, which then assigns
the in- or out-of-distribution class label.
4.1 Classification Threshold
As is the case for any score-based one-class classifi-
cation method, the classification threshold can be ad-
justed to modify the behaviour of the classifier, de-
pending on the application’s requirements. As a vi-
able first solution to determining the threshold, we
propose the following simple algorithm:
1. Calculate the average uncertainty of the in-
distribution samples U
Q
=
1
|I|
∑
(s,a)∈I
U
Q
(s, a).
2. Treat U
Q
as a probability distribution and define
the classification threshold as c = U
Q
+ σ(U
Q
).
Thus, a dynamic threshold based on the uncertainty
distribution is realized that adjusts over the training
process as more data is gathered. Please note that
more complex algorithms for the threshold determi-
nation can be developed, e.g. by using multimodal
probability distributions to model U
Q
.
4.2 Epistemic Uncertainty Estimation
Methods
In principle, any of the epistemic uncertainty estima-
tion methods mentioned in Section 3.1 that are appli-
cable to the function approximator used to model the
Q-function, can be used in the UBOOD framework.
In this paper, we evaluate three different UBOOD
versions using different methods for epistemic uncer-
tainty estimation and their effect on the OOD classi-
fication performance, as the networks are being used
by the RL agent for value estimation.
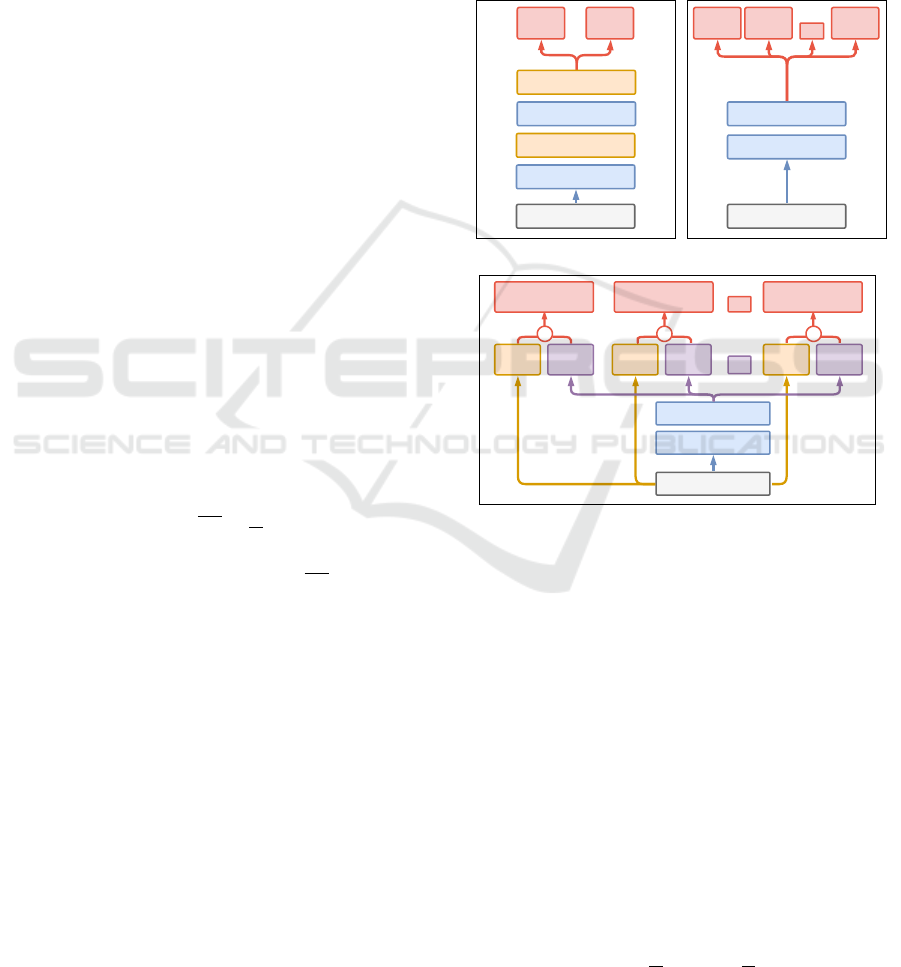
The Monte-Carlo Concrete Dropout method is
based on the dropout variational inference architec-
ture as described by (Kendall and Gal, 2017). Instead
of default dropout layers, we use concrete dropout
layers as described by (Gal et al., 2017), which do not
require pre-specified dropout rates and instead learn
individual dropout rates per layer. Figure 1a presents
a schematic of the network used by this method.
μ
Fully Connected (64)
Input
Fully Connected (64)
σ
Concrete Dropout
Concrete Dropout
(a) MCCD network
Head
1
Fully Connected (64)
Input
Fully Connected (64)
Head
2
Head
10
...
(b) Bootstrap network
Head
1
Fully Connected (64)
Input
Fully Connected (64)
Head
2
Head
10
...
Prior
1
Prior
2
Prior
10
Posterior
1
+
...
Posterior
2
+
Posterior
10
+
(c) Bootstrap-Prior network
Figure 1: (a) Monte-Carlo Concrete Dropout network, cal-
culating epistemic uncertainty using multiple MC samples.
(b) Bootstrap network, and (c) Bootstrap-Prior network
which adds the output of an untrainable prior network to
the output of the bootstrap heads to generate K = 10 pos-
terior heads. For both bootstrap-based architectures, epis-
temic uncertainty is calculated as the variance of the K out-
puts.
This concrete dropout method is of special interest
in our context of reinforcement learning, as here the
available data change during the training process, ren-
dering a manual optimization of the dropout rate hy-
perparameter even more difficult. Model loss is calcu-
lated by minimizing the negative log-likelihood of the
predicted output distribution. Epistemic uncertainty
as part of the total predictive uncertainty is then cal-
culated as:
Var
ep
(y) ≈
1
T
T
∑
t=1
ˆy
2
t
− (
1
T
T
∑
t=1
ˆy
t
)
2
(2)
Uncertainty-based Out-of-Distribution Classification in Deep Reinforcement Learning
525

with T outputs ˆy
t
of the Monte-Carlo sampling.
The Bootstrap method is based on the network ar-
chitecture described by (Osband et al., 2016). It rep-
resents an efficient implementation of the bootstrap
principle by sharing a set of hidden layers between all
members of the ensemble. In the network, the shared,
fully-connected hidden layers are followed by an out-
put layer of size K, called the bootstrap heads, as can
be seen in Figure 1b. For each datapoint, a Boolean
mask of length equal to the number of heads is gener-
ated, which determines the heads this datapoint is vis-
ible to. The mask’s values are set by drawing K times
from a masking distribution. For the work at hand, the
values are independently drawn from Bernoulli distri-
butions with either p = 0.7 or p = 1.0. In the case of
p = 1.0, the bootstrap is reduced to a classic ensemble
where all heads are trained on the complete data.
The Bootstrap-Prior method is based on the ex-
tension presented in (Osband et al., 2018). It has the
same basic architecture as the Bootstrap method but
with the addition of a so-called random Prior Net-
work. Predictions are generated by adding the data
dependent output of this untrainable prior network to
the output of the different bootstrap heads in order
to calculate the ensemble posterior (Figure 1c). The
authors conjecture that the addition of this random-
ized prior function outperforms deep ensemble-based
methods without explicit priors, as for the latter, the
initial weights have to act both as prior and training
initializer.
For both bootstrap-based methods, epistemic uncer-
tainty is calculated as the variance of the K outputs.
5 EXPERIMENTAL SETUP
5.1 Framework Versions
We evaluate three different versions of the UBOOD
framework:
• UB-MC: UBOOD with Monte-Carlo Concrete
Dropout (MCCD) network
• UB-B: UBOOD with Bootstrap network
• UB-BP: UBOOD with Bootstrap-Prior network
The UB-MC version’s estimator network consists of
two fully-connected hidden layers with 64 neurons
each, followed by two separate neurons in the output
layer representing µ and σ of a normal distribution.
As concrete dropout layers are used, no dropout prob-
ability has to be specified. Model loss and epistemic
uncertainty are calculated as described in Section 4.
The UB-B Bootstrap neural network and UB-BP
Bootstrap-Prior neural network versions all consist of
two fully-connected hidden layers with 64 neurons
each, which are shared between all heads, followed
by an output layer of K = 10 bootstrap heads.
Each of these UBOOD versions is further evalu-
ated with two parametrizations of the respective epis-
temic uncertainty estimation method: UB-MC40 and
UB-MC80 differ in respect to the amount of Monte-
Carlo forward passes that are executed to approx-
imate the epistemic uncertainty: 40 or 80 passes.
UB-B and UB-BP parametrizations (UB-B07, UB-
B10, UB-BP07, UB-BP10) differ in respect to the
Bernoulli distribution used to determine the bootstrap
mask: probability p = 0.7 for UB-B07 & UB-BP07
and probability p = 1.0 for UB-B10 & UB-BP10.
For all networks, ReLU is used as the layers’ acti-
vation function, with the exception of the output lay-
ers, where no activation function is used. The classi-
fication threshold is calculated as c = U
Q
+ σ(U
Q
), as
described in section 4.1.
5.2 Environments
One of the problems in evaluating OOD detection
for RL is the lack of datasets or environments which
can be used for generating and assessing OOD sam-
ples in a controlled and reproducible way. By con-
trast to the field of image classification, where bench-
mark datasets exist that contain OOD samples, there
are no equivalent sets for RL. We apply a principled
approach to develop two environments, one using a
gridworld-style discrete state-space, the other using a
continuous state-space. Both environments allow sys-
tematic modifications after the training process, thus
producing OOD states during evaluation.
The first environment is a simple gridworld
pathfinding environment. It is built on the design pre-
sented in (Sedlmeier et al., 2019) and has a discrete
state-space. The basic layout consists of two rooms,
separated by a vertical wall. Movement between the
rooms is only possible via two hallways, as is visu-
alised in Figure 2. The agent starts every episode
at a random position on the grid (labeled S in Fig-
ure 2) and has to reach a specific goal position on the
grid (labeled G), which also varies randomly every
episode, by choosing one of the four possible actions:
{up,down,left,right}.
The state of the environment is represented as a
stack of three 12 × 4 feature planes, with each plane
representing the spatial positions of all environment
objects of a specific type: agent, goal or wall. Each
step of the agent incurs a cost of −1 except the goal-
reaching action, which is rewarded with +100 and
ends the episode. We evaluate the performance of the
UBOOD framework on a set of 8 environment config-
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
526
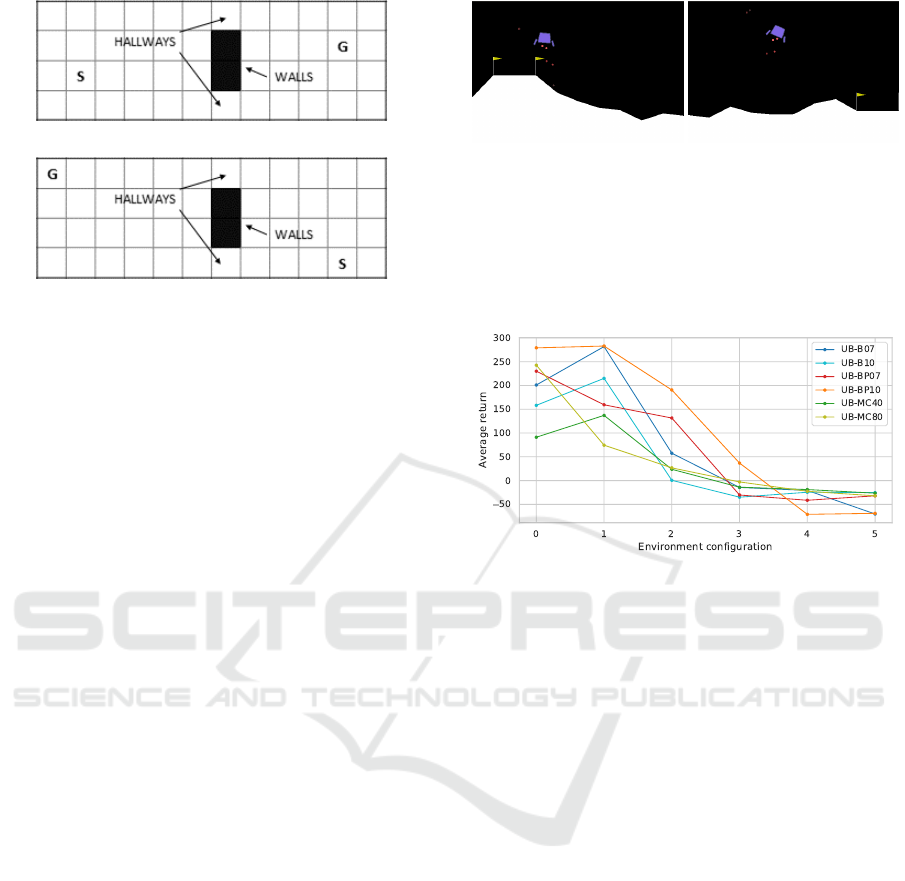
(a) Example environment: Config 0
(b) Example environment: Config 7
Figure 2: Example initializations of the gridworld pathfind-
ing environment using different configurations. S indicates
the agent’s start position, while G marks the goal. (a) shows
a placement using environment configuration 0 as active in
training (in-distribution). (b) shows an initialization of envi-
ronment configuration 7 which differs maximally from the
training configuration.
urations. All environment configurations have a size
of 12 × 4 and randomly vary the y-coordinate of the
agent’s start position as well as the goal position ev-
ery episode, in the interval [0, 4). Configuration 0,
the only configuration used in training, varies the x-
coordinate of the agent’s start position in the inter-
val [0, 5) and the goal position in the interval [7, 12).
Each environment configuration 1 − 7 is then defined
by shifting the start interval right by 1 compared to
the previous configuration, while the goal interval is
shifted left by 1. This results in environment config-
urations with increasing difference from the training
configuration 0, as can be seen in the example shown
in Figure 2b.
The continuous state-space environment is based
on OpenAI’s LunarLander environment. The goal is
to safely land a rocket inside a defined landing pad,
without crashing. This task can be understood as
rocket trajectory optimization. While the original en-
vironment defines a static position for the landing pad,
our modified environment allows for random place-
ment inside specified intervals. As the original envi-
ronment does not encode the landing pad’s position in
the state representation, our version extends the state
encoding to include the left and right x-coordinate as
well as the y-coordinate of the pad. For evaluating the
performance of the UBOOD framework in this con-
tinuous state-space environment, we created a set of
6 configurations. Configuration 0, the only configu-
ration used in training, varies the x-coordinate of the
center of the landing pad in the interval [2, 5) and the
y-coordinate in the interval [6, 12), which results in
the landing pad being placed in the upper left side
(a) Example: Config 0 (b) Example: Config 5
Figure 3: Examples from the LunarLander environment us-
ing different configurations. (a) configuration 0 as active in
training. Samples collected with this configuration define
the in-distribution set. (b) example environment configura-
tion 5 which differs maximally from the training configura-
tion.
Figure 4: Returns achieved by the different versions on
varying configurations of the LunarLander environment af-
ter 10000 training episodes on configuration 0. All values
shown are averages of 30 evaluation runs.
of the environment, as can be seen in the example
shown in Figure 3a. Each environment configuration
1 − 5 is then defined by shifting the x-coordinate in-
terval right by 1 compared to the previous configu-
ration, while the y-coordinate interval is shifted left
by 1. This results in the pads being placed increas-
ingly to the lower right side of the environment. Like
in the gridworld environment, this produces environ-
ment configurations with increasing difference from
the training configuration 0.
6 PERFORMANCE RESULTS
All evaluated versions learn successful policies on
both the gridworld and LunarLander environments.
Returns achieved by the trained policies after 10000
training episodes on different environment configura-
tions are shown in Figure 4. As is to be expected,
increasing changes to the environment (configuration
1 − 5) reduce the achieved return, as the evaluation
environment increasingly differs from the training en-
vironment configuration 0.
We evaluate the performance of the UBOOD
framework based on the F1-Score as the harmonic
Uncertainty-based Out-of-Distribution Classification in Deep Reinforcement Learning
527
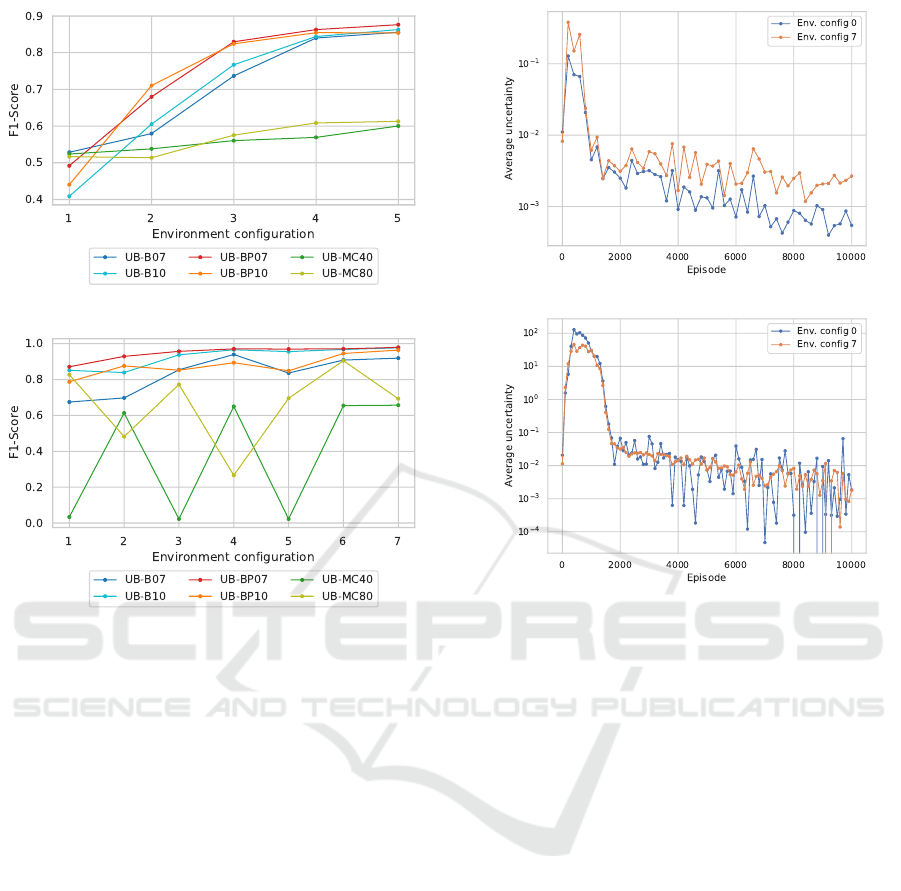
(a) LunarLander
(b) Gridworld
Figure 5: F1-Scores of the classifier evaluated on differ-
ent configurations of the LunarLander and gridworld envi-
ronments. In-distribution (training) samples of each envi-
ronment are defined as negatives, samples from the other
configurations 1 − 5 as positives (OOD). Samples are ag-
gregated from 30 consecutive episode runs.
mean of precision and recall. Figure 5 shows the F1-
Scores achieved, dependent on the uncertainty esti-
mation technique used in the framework. Best overall
classification results on the LunarLander environment
are achieved for UB-BP, i.e. using UBOOD with the
Bootstrap-Prior estimator with F1-values as high as
0.903 for UB-BP07 on environment configuration 5.
F1-Scores of the UB-B and UB-BP versions on the
gridworld environment are higher overall, when com-
pared to the UB-MC versions. Overall, classification
performance increases over environment configura-
tions 1 − 5 when Bootstrap-based estimators are used
in the UBOOD framework. UB-MC, i.e. UBOOD
combined with MCCD estimators, generates highly
varying F1-scores. By contrast to the Bootstrap-based
versions, there is no relation apparent between the
strength of the environment modification and the clas-
sification performance.
(a) UB-B07
(b) UB-MC80
Figure 6: Average uncertainties (30 runs) reported by (a)
UB-B07 and (b) UB-MC80 on the Gridworld environment.
7 SUMMARY & DISCUSSION
In this paper, we presented UBOOD, an uncertainty-
based out-of-distribution classification framework.
Evaluation results show that using the epistemic un-
certainty of the agent’s value function presents a vi-
able approach for OOD classification in a deep RL
setting. We find that the framework’s performance
is ultimately dependent on the reliability of the un-
derlying uncertainty estimation method, which is why
good uncertainty estimates are required.
On both evaluation domains, UBOOD combined
with ensemble-based bootstrap uncertainty estimation
methods (UB-B / UB-BP) shows good results with
F1-scores as high as 0.903, allowing for a reliable
differentiation between in- and OOD-samples. F1-
Scores increase as the environment configuration dif-
fers more from the training environment, i.e. the
stronger OOD the observed samples, the more re-
liable the classification. The addition of a prior
(UB-BP) has a positive effect on the separation of
in- and out-of-distribution samples as is reflected in
higher F1-scores. By contrast, UBOOD combined
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
528

with the concrete dropout-based uncertainty estima-
tion method (UB-MC) does not produce viable re-
sults. Although increasing the amount of Monte-
Carlo samples improves the performance somewhat,
the resulting classification performance is not on par
with the Bootstrap-based versions. The reason for the
large difference in performance can be seen in the ex-
ample shown in Figure 6. For the UB-B version,
the reported uncertainties on environment configura-
tion 0 (training) and 7 (strong modification) increas-
ingly diverge with progressing training episodes (Fig-
ure 6a). As this is not the case for the UB-MC version
(Figure 6b), only the Bootstrap-based version allows
for an increasingly better differentiation between in-
and OOD samples and consequently high F1-scores
of the classifier. We found this effect to be consis-
tent over all parametrizations of the Bootstrap- and
MCCD-based versions we evaluated.
Our results match recent findings (Beluch et al.,
2018), where ensemble-based uncertainty estimators
were compared against Monte-Carlo Dropout based
ones for the case of active learning in image classifica-
tion. There also, ensembles performed better and led
to more calibrated uncertainty estimates. The authors
argue that the difference in performance could be a
result of a combination of decreased model capac-
ity and lower diversity of the Monte-Carlo Dropout
methods when compared to ensemble approaches.
This effect would also explain the behaviour we ob-
served when comparing uncertainty and achieved re-
turn. While there is a strong inverse relation when
using Bootstrap-based UBOOD versions, no clear
pattern emerged for the evaluated MCCD-based ver-
sions. We think that further research into the rela-
tion between epistemic uncertainty and achieved re-
turn when train- and test-environments differ could
provide interesting insights relating to generalization
performance in deep RL. Being able to differenti-
ate between an agent having encountered a situation
in training versus the agent generalizing its experi-
ence to new situations could provide a huge benefit
in safety-critical situations.
REFERENCES
Bellemare, M. G., Dabney, W., and Munos, R. (2017). A
distributional perspective on reinforcement learning.
In Proceedings of the 34th International Conference
on Machine Learning-Volume 70, pages 449–458.
Beluch, W. H., Genewein, T., N
¨
urnberger, A., and K
¨
ohler,
J. M. (2018). The power of ensembles for active learn-
ing in image classification. In The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Bishop, C. M. (1994). Novelty detection and neural net-
work validation. IEE Proceedings - Vision, Image and
Signal Processing, 141(4):217–222.
Gal, Y., Hron, J., and Kendall, A. (2017). Concrete dropout.
In Advances in Neural Information Processing Sys-
tems 30, pages 3581–3590.
Graves, A. (2011). Practical variational inference for neural
networks. In Advances in Neural Information Pro-
cessing Systems 24, pages 2348–2356.
Hendrycks, D. and Gimpel, K. (2016). A Baseline for De-
tecting Misclassified and Out-of-Distribution Exam-
ples in Neural Networks. ArXiv e-prints.
Hern
´
andez-Lobato, J., Li, Y., Rowland, M., Hern
´
andez-
Lobato, D., Bui, T., and Ttarner, R. (2016). Black-
box α-divergence minimization. In 33rd International
Conference on Machine Learning, ICML 2016, vol-
ume 4, pages 2256–2273.
Kahn, G., Villaflor, A., Pong, V., Abbeel, P., and
Levine, S. (2017). Uncertainty-aware reinforcement
learning for collision avoidance. arXiv preprint
arXiv:1702.01182.
Kendall, A. and Gal, Y. (2017). What uncertainties do we
need in bayesian deep learning for computer vision?
In Advances in Neural Information Processing Sys-
tems 30, pages 5574–5584.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles. In Advances in Neural Infor-
mation Processing Systems 30, pages 6402–6413.
Li, Y. and Gal, Y. (2017). Dropout Inference in Bayesian
Neural Networks with Alpha-divergences. ArXiv e-
prints.
Liang, S., Li, Y., and Srikant, R. (2017). Enhancing The
Reliability of Out-of-distribution Image Detection in
Neural Networks. ArXiv e-prints.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, et al. (2015). Human-level control through
deep reinforcement learning. Nature, 518(7540):529.
Osband, I., Aslanides, J., and Cassirer, A. (2018). Random-
ized Prior Functions for Deep Reinforcement Learn-
ing. ArXiv e-prints.
Osband, I., Blundell, C., Pritzel, A., and Van Roy, B.
(2016). Deep exploration via bootstrapped dqn. In
Advances in Neural Information Processing Systems
29, pages 4026–4034.
Pimentel, M. A., Clifton, D. A., Clifton, L., and Tarassenko,
L. (2014). A review of novelty detection. Signal Pro-
cessing, 99:215 – 249.
Qazaz, C. S. (1996). Bayesian error bars for regression.
PhD thesis, Aston University.
Schlegl, T., Seeb
¨
ock, P., Waldstein, S. M., Schmidt-Erfurth,
U., and Langs, G. (2017). Unsupervised anomaly de-
tection with generative adversarial networks to guide
marker discovery. In IPMI.
Sedlmeier, A., Gabor, T., Phan, T., Belzner, L., and
Linnhoff-Popien, C. (2019). Uncertainty-based out-
of-distribution detection in deep reinforcement learn-
ing. arXiv preprint arXiv:1901.02219.
Watkins, C. J. C. H. (1989). Learning from delayed rewards.
PhD thesis, King’s College, Cambridge.
Uncertainty-based Out-of-Distribution Classification in Deep Reinforcement Learning
529
