
Fast Scene Text Detection with RT-LoG Operator and CNN
Dinh Cong Nguyen
1,2
, Mathieu Delalandre
1
, Donatello Conte
1
and The Anh Pham
2
1
Tours University, Tours City, France
2
Hong Duc University, Thanh Hoa, Vietnam
Keywords:
Scene Text Detection, Keypoint Grouping, RT-LoG, Character Pattern.
Abstract:
Text detection in scene images is of particular importance for the computer-based applications. The text detec-
tion methods must be robust against variabilities and deformations of text entities. In addition, to be embedded
into mobile devices, the methods have to be time efficient. In this paper, the keypoint grouping method is pro-
posed by first applying the real-time Laplacian of Gaussian operator (RT-LoG) to detect keypoints. These
keypoints will be grouped to produce the character patterns. The patterns will be filtered out by using a CNN
model before aggregating into words. Performance evaluation is discussed on the ICDAR2017 RRC-MLT
and the Challenge 4 of ICDAR2015 datasets. The results are given in terms of detection accuracy and time
processing against different end-to-end systems in the literature. Our system performs as one of the strongest
detection accuracy while supporting at approximately 15.6 frames per second to the HD resolution on a regular
CPU architecture. It is one of the best candidates to guarantee the trade-off between accuracy and speed in the
literature.
1 INTRODUCTION
Scene text detection is a key topic in the literature
(Long et al., 2018) since several years ago due to its
influence in the real-life. Text detection can be ap-
plied in a wide range of applications such as traffic
sign recognition, blind assistance, augmented reality
and so on. However, detecting and localizing scene
text still remains a challenge due to degradation. This
covers different aspects such as the texture, illumina-
tion changes, the differences in languages, scales of
characters and the background/foreground transitions
Figure 1. Robust methods must be designed against
variabilities, deformations of text entities.
Moreover, another crucial problem is to adapt the
methods to be time-efficient such as they can em-
bedded into mobile devices. This involves an almost
complete reformulation of the methods to make them
real-time in order to respect the time constraint for
detection (Neumann and Matas, 2015).
The real-time methods in the literature apply a
two-stage strategy for localization followed by text
verification. The localization determines the posi-
tions of candidate text elements in the image at a low
complexity level. The main goal is to process with
a strong recall to not miss text elements. After that,
text verification specifies which candidate is text or
not. It filters out the false alarms by using verification
Figure 1: Examples of text in natural scenes with specific
degradations (a) blurring (b) different sizes of character (c)
illumination changes.
procedures. The two-stage strategy is opposite to the
end-to-end strategy merging localization and verifica-
tion (Long et al., 2018).
A core component of the two-stage strategy is the
local operator. The local operator extracts candidate
keypoints at the locations of text elements in the im-
age. Different real-time operators have been proposed
in the literature for scene text detection as the FAS-
Text operator (Busta et al., 2015), the Canny Text
Detector (Cho et al., 2016) and the Maximally Sta-
ble Extremal Regions (MSER) operator (Gomez and
Karatzas, 2014).
In this paper, we propose a new system applying a
two-stage strategy for the real-time detection of scene
text. Compared with the other systems in the litera-
ture, our system applies in the first stage an RT-LoG
operator. The RT-LoG operator is the real-time im-
plementation of the Laplacian of Gaussian (LoG) op-
Nguyen, D., Delalandre, M., Conte, D. and Pham, T.
Fast Scene Text Detection with RT-LoG Operator and CNN.
DOI: 10.5220/0008944502370245
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
237-245
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
237
erator (Fragoso et al., 2014; Nguyen et al., 2019). It
is competitive for time processing and can be adapted
to text detection. Furthermore, it provides meaningful
scale-space and contrast information for detection.
This paper gives several key contributions.
• We propose a new grouping approach to embed
the RT-LoG operator into a two-stage system.
• We highlight how the RT-LoG operator can sup-
port the full pipeline for scene text detection.
• We provide a performance evaluation where our
overall system achieves one of the strongest de-
tection accuracy of the literature, while requiring
less than two orders of magnitude for the process-
ing resources compared to our competitors.
The rest of paper is organized as follows. Section 2
presents our system. Then, the performance evalua-
tion of the system is discussed in section 3. At last,
section 4 will summarize and give out some perspec-
tives. For convenience, Table 1 provides the meaning
of the main symbols used in the paper.
2 PROPOSAL APPROACH
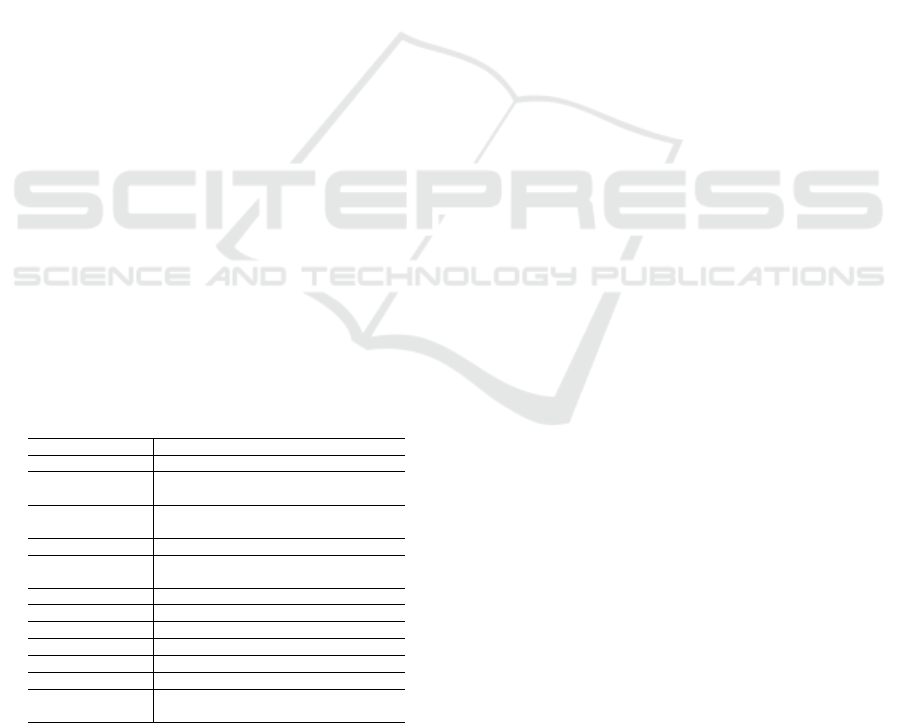
The general architecture is presented in Figure 2. At
the first stage, we employ the RT-LoG operator to de-
tect the keypoints among the strokes composing the
characters. Next, a dedicated algorithm is proposed
to group the keypoints using the spatial/scale-space
representation of the RT-LoG operator. The grouping
method results in Regions of Interest (RoIs) consti-
tuted of character patterns (characters, parts of char-
acters, connected characters). These RoIs are verified
into text/non text regions by a CNN. Before the veri-
Table 1: The main symbols used in the paper.
Symbols Meaning
x,y Image coordinates
g = f (x, y)
f the image function returning
the gray-level g at any location (x,y)
w
Stroke width parameter w ∈ [w
min
,w
max
]
with {w
min
,...,w
max
} the set of values
m Scale parameter m = (w
max
− w
min
) + 1
h(x,y)
Map of the responses h to all the pixels
in the image with h ∈ [−1,1]
β A thresholding parameter
p = (x,y,g,h,w) A keypoint
n,k The number of keypoints with k << n
S A set of keypoints {p
1
,.., p
n
}
Q ⊆ S A subset of keypoints {p
1
,.., p
k
}
q The number of Regions of Interest (RoIs)
R
A set of RoIs R = {R
1
,.,R
i
,.R
q
}
R
i
is a given RoI
fication, these RoIs are normalized using the RT-LoG
and geometric features. This normalization relaxes
the verification with the CNN from invariant prob-
lems such as the contrast, scale and orientation. A
method for text line grouping is applied in the final
stage. We will detail in following subsections.
2.1 The RT-LoG Operator
To start, we process the image with the RT-LoG op-
erator to detect the keypoints constituting the charac-
ters Figure 3. Optimization of the operator is obtained
with estimation of the LoG function and fast Gaus-
sian convolution (Fragoso et al., 2014). Adaptation
to stroke detection is given by the stroke model for
scale-space representation (Nguyen et al., 2019; Liu
et al., 2014).
The operator is controlled with a range of widths
w ∈ [w
min
,w
max
] of the strokes to detect. Within this
range, m = {w
max
− w
min
} + 1 is not only the number
of stroke widths to detect but also the parameter of
the scale-space problem. An additional parameter β
serves to threshold the operator responses and to tune
the precision/recall of the detection.
The operator results in a set of n keypoints S =
(p
1
,...p
i
,...p
n
) where a keypoint p = (x,y,g,h, w) is
given with (x,y) the spatial coordinates, g the gray
level at the keypoint location, h the operator response
and w the stroke width parameter. The operator
response h is either positive or negative depending
the background/foreground transition of the character.
Figure 3 gives an example of keypoint detection with
the corresponding response map h(x, y) providing the
h responses at every location (x,y).
The RT-LoG operator provides meaningful scale-
space and contrast information. This can drive a
grouping method to obtain the character patterns and
to guide a text verification stage. We will discuss
these aspects in next subsections.
2.2 The Spatial/Scale-space Grouping
The RT-LoG operator gives out, for each image, a
set of keypoints belonging to the strokes composing
the characters. These keypoints must be grouped to-
gether to constitute character patterns. The grouping
of keypoints is well-known topic in the image pro-
cessing and computer vision field (Dan et al., 2015).
The main challenge here is to outline keypoints be-
longing to particular objects or RoIs in the image.
Different strategies can be applied as the area-split
with load imbalance, the clustering (e.g. K-means,
Density-based spatial clustering), the grouping with
machine learning (while characterizing the keypoints
with descriptors) or the geometric consistency.
The grouping methods are dependent on the used
features for the keypoints and the considered local op-
erators. Several grouping methods for the LoG-based
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
238
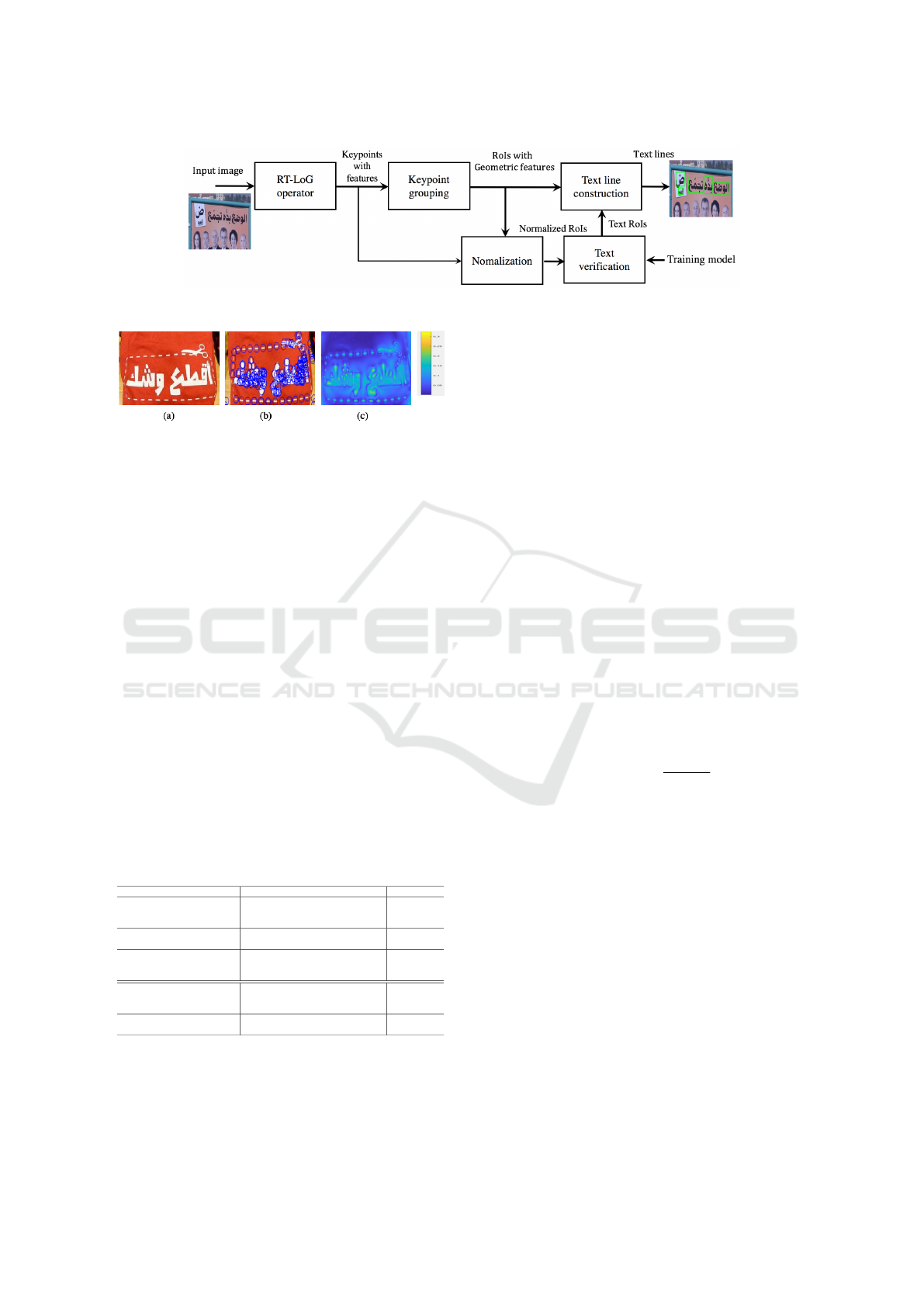
Figure 2: The detail of our approach.
Figure 3: (a) input image (b) detected keypoints with cir-
cle/radius at w/2 (c) the corresponding feature map h(x,y).
operators have been proposed in the literature Table 2.
These methods target particular applications such as
the general object detection or the scene text detec-
tion. The scale-space model is a key property to en-
sure a consistency while detecting the keypoints. Op-
timal model could be established for the stroke detec-
tion (Liu et al., 2014; Nguyen et al., 2019) but not for
general object detection. In that case, the strategy of
the grouping methods is driven by a high-level charac-
terization of the keypoints with handcrafted features
and/or machine learning methods.
At the best of our knowledge, a dedicated group-
ing method for the RT-LoG operator, while embed-
ding the stroke model, has neither been investigated
in the literature. In this paper, we propose a new ap-
proach to drive a consistent grouping with optimiza-
tion using the spatial/scale-space representation of the
RT-LoG operator. Our method uses three main steps
as detailed in Figure 4. We will detail these steps in
next paragraphs.
Table 2: The overview of the grouping methods for LoG-
based operators.
References Methods Applications
(Dong et al., 2015)
The stroke width values are
locally calculated and gathered
into SWT map.
Text
detection
(Mao et al., 2013)
The geometric context of
SIFT keypoints is discovered.
Text
detection
(Shivakumara and Phan, 2010)
K-means clustering is used
to identify candidate text regions
based on the maximum difference.
Text
detection
(Xu et al., 2016)
Keypoints are clustered into
different group by mean-shift
algorithm and geometrical closeness.
Object
detection
(Fernndez-Carams et al., 2014)
Vertical lines is produced by the
Haar-like features and Integral image.
Object
detection
Foreground/Background Partitioning (Step 1):
in this step, we need to cope with both conditions
in scene text detection such as a light character in
a dark background producing minus responses and
vice-versa. A keypoint p = (x,y,g,h,w) is given with
a normalized response of the operator h. This re-
sponse h ∈ [−1, 1] results in two conditions of white
h ∈ [−1, 0[ and dark h ∈]0, 1] foregrounds, respec-
tively. The keypoints belonging to a same character
pattern are supposed to have a similar response. This
step splits the set of keypoints into two subsets based
on their responses.
Scale-space Partitioning and Grouping (Steps
2,3): the RT-LoG operator is scale-invariant and pro-
vides a stroke width parameters w for each of the de-
tected keypoint. This is an useful information that can
be used as a local threshold to group the keypoints.
The RT-LoG operator applies a Non-maximum sup-
pression (NMS) within 3 × 3 local neighborhood.
This guarantees an overlapping between the key-
points, while setting the operator with w
min
≥ 2.
The grouping performs for each of the keypoint p
i
in the subsets obtained from the step 1. A keypoint
p
i
is grouped with a keypoint p
j
, with i, j ∈ [1,n], if
their Euclidean distance fits with Eq (1), illustrated in
Figure 5. In that case, the label of the keypoint p
i
is
propagated to the keypoint p
j
.
kp
i
− p
j
k
2
≤
w
i
+ w
j
2
(1)
Similar to (Cabaret and Lacassagne, 2017), the
overall grouping must applies forward/backward re-
quests and propagation to merge the labels between
the keypoints. The requests could be time-consuming
depending significantly on the used request algorithm
and the number of keypoints. For optimization, the
keypoints can indexed with a KD-tree based DB-
SCAN (Vijayalaksmi and Punithavalli, 2012). The
method is known as one of the fastest in the literature
for the regular range searching problem. The overall
grouping can be achieved with nlog(n) comparisons.
We propose here a strategy for optimization tak-
ing into account the specificity of the detection prob-
lem with the RT-LoG operator. A large number of
keypoints belonging to a character pattern has a close
stroke width Figure 6 (a). We use this property to
group at a low complexity level the keypoints within
the same scale. After that, the grouping is extended to
Fast Scene Text Detection with RT-LoG Operator and CNN
239
the in-between scales. We use here a two-stage strat-
egy for grouping, as detailed below.
• Step 2: the keypoints are partitioned first into
subsets according to their stroke width parameter
w ∈ [w
min
,...,w
max
]. This is obtained with a linear
scan of the overall set S = (p
i
,..., p
n
) at a com-
plexity O(n). A subset is noted as Q = (p
1
,.., p
k
)
where k << n. Every subset Q is indexed with
KD-tree based DBSCAN to get cluster compo-
nents corresponding to the character pattern Fig-
ure 6 (b). This process has a complexity klog(k)
for every subset Q. Each cluster is assigned with
an ID.
• Step 3: the grouping is extended to the in-between
scales Figure 6 (c). For optimization, clusters
from the different scales will be compared. The
comparison is stopped at the first matching among
clusters. The forward/backward propagation is
applied to merge the labels and the clusters to get
the set of RoIs R = {R
1
,.,R
i
,.,R
q
}.
Finally, we compute a set of geometric features
from the keypoints belonging to a RoI to get the cen-
troid, the area/perimeter, the bounding box and the
orientation. These features will be used in the scene
text detection pipeline to drive the image normaliza-
tion and text line construction Figure 2.
2.3 Verification and Text Line
Construction
The grouping algorithm results in the detection of
RoIs. As the RT-LoG operator detects strokes, the de-
tected RoIs could be either character patterns or back-
ground elements from the natural scene image. The
RoIs must be classified to filter out the character pat-
terns from background. This is the text verification
problem that takes part in the scene text detection.
The traditional approach for scene text detection is
to apply hand-crafted features with classification. Re-
Table 3: CNN models for text verification.
Image size (24 × 24) - (32 × 32)
Layer No Filter size Filter No Pooling
Conv1 (5 × 5)-(8 × 8) x20 - x96 (2 × 2)-(5 × 5)
Conv2 (2 × 2)-(5 × 5) x50 - x256 (2 × 2)
cently, CNN becomes prominent into the field where a
main issue is to design end-to-end system (Long et al.,
2018). When applying to text verification, the CNN
classifies the RoIs of images to verify if a RoI belongs
to a text part or not.
Several CNN models have been proposed in the
literature for the text verification (Yang et al., 2015;
Ray et al., 2016; Wang et al., 2018; Zhang et al.,
2015; Ghosh et al., 2019). Table 3 gives a summary.
The fundamental model is to process with two con-
volutional layers while using a ReLU function for the
non-linearity and a max pooling for optimization. A
fully-connected layer (FC) is used in the final stage
for classification set with a softmax function. Some
works have investigated deeper models using up to
four convolutional layers as (Zhang et al., 2015).
For the sake of performance evaluation, we cus-
tomize our model inspired from (Wang et al., 2018;
Ghosh et al., 2019). It is produced with two convolu-
tional layers and one FC layer. For each convolutional
layer, ReLu activation and average pooling layer are
followed.
A core problem for text verification is the vari-
ability character patterns. These patterns are not nor-
malized and suffered from distortions Figure 7 (a) -
(d). Another problem comes from the look-like cur-
sive characters that results in word patterns after de-
tection and grouping Figure 7 (e). The normalization
of these patterns to 32 × 32 images introduces other
distortions as the down-scaling and the modification
of the aspect ratio. This tends to burden the learning
period of the CNN training for text verification.
To solve these problems, we apply an image nor-
malization before to classify the character patterns
with the CNN Figure 2. We use the RT-LoG and geo-
metric features to drive the normalization as they pro-
vide meaningful information about the character pat-
terns. Our process is detailed here.
• Skew correction: we use the geometric features to
correct the skew of characters with image rotation
Figure 7 (a).
• Background/foreground normalization: the key-
points belonging to a character pattern provide
a common operator response h. This response
is whether positive or negative depending on the
background/foreground transition. We look for all
the character patterns having a positive response
h > 0 and invert the image for normalization Fig-
ure 7 (b).
• Contrast normalization: the character patterns ap-
pear with different background/foreground ampli-
tudes. This is a problem of contrast normalization
that can be solved from the operator response h.
Indeed, the operator response h ∈ [−1,1], where
|h| = 1 is obtained from bilevel black and white
image having a maximum amplitude. We use the
response h and the g values to get a lookup table
to normalize the contrast Figure 7 (c).
• Scale normalization: the normalization of charac-
ter patterns to 32×32 image distorts the aspect ra-
tio Figure 7 (d). We use the average stroke width
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
240

Figure 4: The detail of spatial/scale-space grouping method.
Figure 5: The grouping rule of two keypoints.
w of character patterns as a scale estimator. This
estimator serves to compute a scale ratio w
0
/w
with w
0
an offline parameter obtained from the
training database. The parameter w
0
is fixed in or-
der to embed the character patterns into a 32 × 32
image, as an average. If not, we split the character
patterns into 32 × 32 patches while respecting an
overlapping threshold Figure 7 (e).
In the final step, after verification with normaliza-
tion, the close text regions must be grouped to get the
text lines. Similar to (Cho et al., 2016), we use the
method of minimum-area encasing rectangle to pro-
vide consistent bounding boxes.
3 PERFORMANCE EVALUATION
In this section, we present the performance evalua-
tion of our system. Section 3.1 introduces the used
datasets. Section 3.2 details the characterization met-
rics. Results are discussed in terms of detection accu-
racy and time processing in sections 3.3 and 3.4.
3.1 Datasets
Several public datasets have been proposed over
the years for performance evaluation of text detec-
tion methods. The ICDAR2017 and ICDAR2019
RRC-MLT are the two up-to-date datasets in litera-
ture (Nayef et al., 2017; Nayef et al., 2019). The
ICDAR2019 RRC-MLT is a recent dataset and a
slight update of the ICDAR2017 RRC-MLT
1
. For
1
The ICDAR2019 RRC-MLT dataset includes 1K im-
ages more on the existing set of 9K images.
our performance evaluation, we have selected the IC-
DAR2017 RRC-MLT dataset where more compara-
tive results are available in the literature. It includes
7200 training images, 1800 validation images and
9000 test images. The images are given at differ-
ent resolutions (VGA, HD, Full-HD, Quad-HD, 4K).
This dataset has a particular focus on the multi-lingual
scene text detection in 9 languages and offers a deep
challenge for scalability. Figure 8 shows some visual
examples of images.
For the processing time, it is more common in
the literature to use the Challenge 4 of ICDAR2015
dataset (Karatzas and Gomez-Bigorda, 2015). This
dataset contains 1000 training images and 500 test im-
ages at HD resolution (1280 × 720).
3.2 Characterization Metrics
For the characterization metrics, we have followed the
recommendations of the international contest (Nayef
et al., 2017). The characterization is achieved at
two levels while applying the Intersection over Union
(IoU) criterion and computing the F-measure. The
output of the text detection system is provided with
bounding boxes. A detection (i.e. a true positive) is
obtained if a detected bounding box has more than
50% overlap (the IoU criterion) with a bounding box
in the groundtruth. The unmatched boxes in the detec-
tion and the groundtruth are false positives and nega-
tives, respectively. The detection cases serve to com-
pute the regular metrics precision (P), recall (R), F-
measure
2
(F). Let’s note that some degraded texts in
the dataset are marked as “don’t care” boxes and ig-
nored in the evaluation process.
3.3 Scene Text Detection
Table 4 shows our evaluation in comparison with the
state-of-the-art. For clarification, we have stood on
the top 10 of competitive systems of the literature.
In addition, our system is given in two implemen-
tation with/without image normalization. Our goal
2
We are not detailing these aspects here and report to
(Nayef et al., 2017).
Fast Scene Text Detection with RT-LoG Operator and CNN
241

Figure 6: (a) Keypoints within the scale-space partitions (b) grouping within the scale-space partitions (c) grouping within
in-between scale-spaces.
Figure 7: Image normalization.
Table 4: Comparison of methods.
(P) Precision (R) Recall and (F) F-Measure on ICDAR2017 RRC-MLT.
Rank Methods P(%) R(%) F(%)
1 PMTD (Liu et al., 2019) 85.15 72.77 78.48
2 FCN-MOML (He et al., 2018) 82.66 72.53 77.26
3 R-CNN-PAN (Huang et al., 2019) 80 69.8 74.3
4 LOMO MS (Zhang et al., 2019) 80.2 67.2 73.1
5 Proposed method with normalization 65.2 82.1 72.6
6 MOSTD (Lyu et al., 2018b) 74.3 70.6 72.4
7 Proposed method without normalization 62.5 82.7 71.2
8 Fots (Liu et al., 2018) 81.86 62.30 70.75
9 AF-RPN (Zhong et al., 2018) 75 66 70
10 Attention Model (Wang et al., 2019) 72 63.5 67.48
11 SCUT DLVClab1 (Nayef et al., 2017) 80.3 54.5 65
Figure 8: Images from the ICDAR2017 RRC-MLT dataset
(Nayef et al., 2017).
here is to illustrate how the RT-LoG operator can sup-
port the CNN for classification.
As highlighted in Table 4, our system appears in
the top 5 for the F-measure score. Furthermore, our
system achieves the strongest recall score of the liter-
ature. This is ensured by the use of the RT-LoG opera-
tor and the dedicated grouping method, which allows
a near complete detection of text elements. The nor-
malization obtained with the RT-LoG operator results
in a slight gap for the F-measure score from 1%-2%.
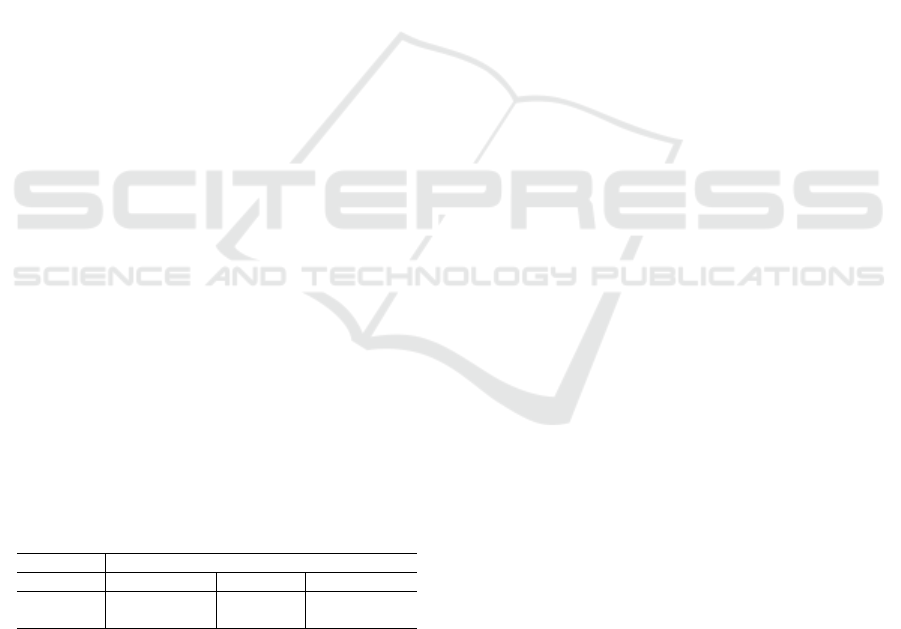
Visual examples of true and missed detections are
shown in Figure 9. The operator fails to detect text in
images with very low contrast. This can be explained
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
242
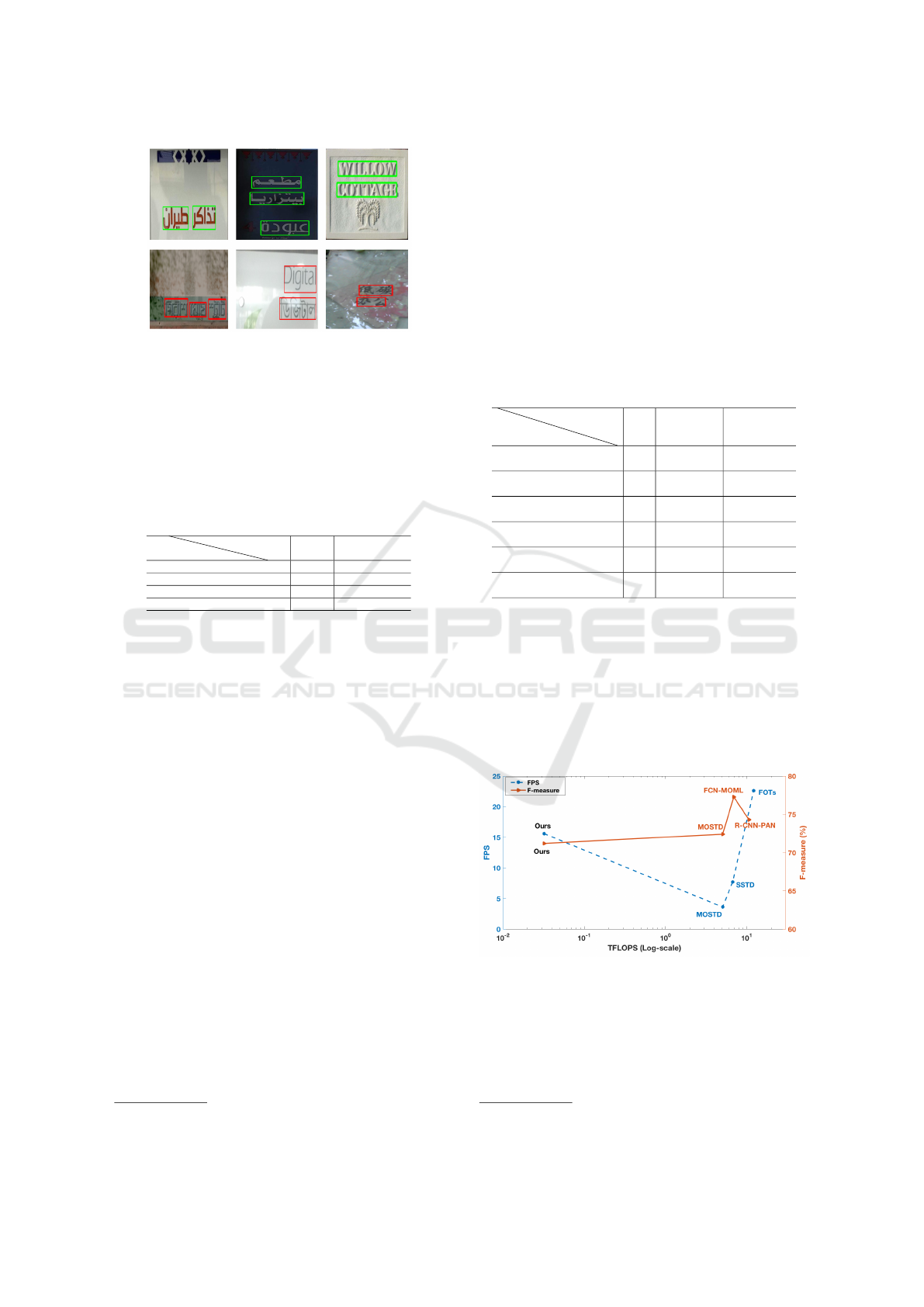
Figure 9: Text detection samples with (green) the true de-
tections and (red) the missed-cases.
by the real-time implementation of the LoG operator,
that is not contrast invariant (Nguyen et al., 2019).
3.4 Processing Time
Table 5: Average processing time in milliseconds (ms) /
amounts of pixels, keypoints and RoIs of each step of the
proposed method.
Methods
Types
HD Data workflow
RT-LoG 320 ms 1.2 Mpixel
Brute-force KD-tree/DBSCAN 662ms 5.2 Kkeypoints
Optimized KD-tree/DBSCAN 258 ms 5.2 Kkeypoints
Verification 336 ms 90 RoIs
We characterize and compare in this section the
processing time of our system against other systems
in the literature. As discussed in section 3.1, the IC-
DAR2015 dataset has been used for testing as it is
common for processing time evaluation.
We have computed first the processing time of
each step of our method using a single thread/core
implementation Table 5. Our implementation is done
with the C++ language and tested on the Mas-OS
and an Intel(R) Core(TM) i7- 4770HQ CPU, 2.2 GHz
having a near 32 GFLOPS SP
3
performance.
We provide in addition in Table 5 information
about the data workflow in the pipeline ( the amounts
of pixels, keypoints and RoIs). The optimization
achieved by our grouping method results in an ap-
proximate two to three times for acceleration factor.
Compared to systems-based R-CNN for scene text
detection (Liu et al., 2019), our system produces less
RoIs. These RoIs are resized into 32 × 32 before ver-
ification. This explains the low-level processing time
required by our text verification stage.
As highlighted the RT-LoG operator results in a
large reduction of the data to process. Despite the dif-
ferent of amount of data, the processing time is close
between the RT-LoG operator and the rest of pipeline
(grouping with CNN). This can be explained by the
3
Single Precision.
real-time implementation of the operator that ensures
a strong optimization of the spatial convolution.
We have evaluated, in a second step, the Frame
rate per second (FPS) of our system on the IC-
DAR2015 dataset Table 6. This evaluation has been
done with a full parallelism support on the CPU while
applying multi-core/threading. We provide in addi-
tion the FPS of the top systems in literature. For a fair
comparison, Table 6 addresses the test architectures
of different systems (either GPU or CPU) with their
relative performances, as obtained from CPU/GPU
benchmarks
4
.
Table 6: Frame rate per second (FPS) among methods on
the Challenge 4 of ICDAR2015 dataset.
Methods
Processing
types
FPS Architecture
Performances
TFLOPS
FOTs-RT(Liu et al., 2018) 22.6
TITAN-Xp
GPU
12.15
Ours 15.6
CPU
2.2 GHz
0.032
SSTD (He et al., 2017) 7.7
TITAN X
GPUs
6.691
EAST (Zhou et al., 2017) 6.52
TITAN-Xp
GPU
12.15
MTS(Lyu et al., 2018a) 4.8
Titan Xp
GPU
12.15
MOSTD(Lyu et al., 2018b) 3.6
Tesla
K40m GPU
5.046
As emphasized in Table 6, our system has the sec-
ond highest FPS while processing with a difference
of two orders of magnitude in term of processing re-
sources. All the top systems in the literature perform
with end-to-end CNN model requiring a GPU archi-
tecture. For clarification, Figure 10 presents a gen-
eral comparison of the performance considering the
F-measure scores, FPS and test architecture.
Figure 10: The performance considering the F-measure
scores and FPS from scene text detection systems corre-
spond to their architecture.
4
www.techpowerup.com; www.cpubenchmark.net.
Fast Scene Text Detection with RT-LoG Operator and CNN
243

4 CONCLUSIONS AND
PERSPECTIVES
This paper presents a new two-stage system for scene
text detection. It applies in the first stage the RT-LoG
operator. This operator supports the full pipeline for
scene text detection. A dedicated algorithm is applied
to group the keypoints into RoIs using the RT-LoG
features. The RoIs are then classified into text/non
text regions by a CNN. Before the verification, the
RoIs are normalized with the RT-LoG features. This
normalization relaxes the verification from invariant
problems. The proposed system is in the top 5 for the
F-measure score and achieves the strongest recall of
the literature. It performs as one of the highest FPS
rate while processing with a difference of two orders
of magnitude in term of processing resources.
As a main perspective, the precision rate of the
system can be consolidated. This can be obtained
by making the RT-LoG operator contrast-invariant, to
deal with the missed detection cases. Deeper CNN
models could be applied to make more robust at the
text verification stage. At last, acceleration of the RT-
LoG operator could be obtained by taking advantage
of the Gaussian kernel distribution and decomposition
with box filtering.
REFERENCES
Busta, M., Neumann, L., and Matas, J. (2015). Fastext: Ef-
ficient unconstrained scene text detector. In Interna-
tional Conference on Computer Vision (ICCV), pages
1206–1214.
Cabaret, L. and Lacassagne, L. (2017). Distanceless label
propagation: an efficient direct connected component
labeling algorithm for gpus. In International Confer-
ence on Image Processing Theory, Tools and Applica-
tions (IPTA), pages 1–6.
Cho, H., Sung, M., and Jun, B. (2016). Canny text detec-
tor: Fast and robust scene text localization algorithm.
In International Conference on Computer Vision and
Pattern Recognition (CVPR), pages 3566–3573.
Dan, G., Khan, M., and Fodor, V. (2015). Characterization
of surf and brisk interest point distribution for dis-
tributed feature extraction in visual sensor networks.
volume 17, pages 591–602.
Dong, W., Lian, Z., Tang, Y., and Xiao, J. (2015). Text de-
tection in natural images using localized stroke width
transform. In International Conference on Multimedia
Modeling (ICMM), pages 49–58.
Fernndez-Carams, C., Moreno, V., and Curto, B. (2014). A
real-time door detection system for domestic robotic
navigation. Journal of Intelligent Robotic Systems,
76(1):119–136.
Fragoso, V., Srivastava, G., Nagar, A., and Li, Z. (2014).
Cascade of box (cabox) filters for optimal scale
space approximation. In International Conference on
Computer Vision and Pattern Recognition Workshops
(CVPRW), pages 126–131.
Ghosh, M., Mukherjee, H., Obaidullah, S., Santosh, K.,
Das, N., and Roy, K. (2019). Identifying the pres-
ence of graphical texts in scene images using cnn. In
International Conference on Document Analysis and
Recognition Workshops (ICDARW), volume 1, pages
86–91.
Gomez, L. and Karatzas, D. (2014). Mser-based real-time
text detection and tracking. In International Con-
ference on Pattern Recognition (ICPR), pages 3110–
3115.
He, P., Huang, W., He, T., and Zhu, Q. (2017). Single shot
text detector with regional attention. In International
Conference on Computer Vision (ICCV), pages 3047–
3055.
He, W., Zhang, X., Yin, F., and Liu, C. (2018). Multi-
oriented and multi-lingual scene text detection with
direct regression. Transactions on Image Processing
(TIP), 27(11):5406–5419.
Huang, Z., Zhong, Z., Sun, L., and Huo, Q. (2019). Mask
r-cnn with pyramid attention network for scene text
detection. In Conference on Applications of Computer
Vision (WACV), pages 764–772.
Karatzas, D. and Gomez-Bigorda, L. (2015). Icdar 2015
competition on robust reading. In International Con-
ference on Document Analysis and Recognition (IC-
DAR), pages 1156–1160.
Liu, J., Liu, X., Sheng, J., and Liang, D. (2019). Pyramid
mask text detector. arXiv preprint:1903.11800.
Liu, X., Liang, D., S.Yan, and Chen, D. (2018). Fots: Fast
oriented text spotting with a unified network. In Con-
ference on computer vision and pattern recognition
(CVPR), pages 5676–5685.
Liu, Y., Zhang, D., Zhang, Y., and Lin, S. (2014). Real-time
scene text detection based on stroke model. In Inter-
national Conference on Pattern Recognition (CVPR,
pages 3116–3120.
Long, S., He, X., and Ya, C. (2018). Scene text
detection and recognition: The deep learning era.
arXiv:1811.04256.
Lyu, P., Liao, M., .Yao, C., and Wu, W. (2018a). Mask
textspotter: An end-to-end trainable neural network
for spotting text with arbitrary shapes. In The Euro-
pean Conference on Computer Vision (ECCV).
Lyu, P., Yao, C., and W. Wu, S. Y. (2018b). Multi-oriented
scene text detection via corner localization and region
segmentation. In Conference on Computer Vision and
Pattern Recognition (CVPR), pages 7553–7563.
Mao, J., Li, H., Zhou, W., Yan, S., and Tian, Q. (2013).
Scale based region growing for scene text detection. In
International conference on Multimedia (ACM), pages
1007–1016.
Nayef, N., Patel, Y., Busta, M., and .Chowdhury, P. (2019).
Icdar2019 robust reading challenge on multi-lingual
scene text detection and recognition–rrc-mlt-2019.
arXiv preprint:1907.00945.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
244

Nayef, N., Yin, F., Bizid, I., and Choi, H. (2017). Icdar2017
robust reading challenge on multi-lingual scene text
detection and script identification-rrc-mlt. In Interna-
tional Conference on Document Analysis and Recog-
nition (ICDAR), volume 1, pages 1454–1459.
Neumann, L. and Matas, J. (2015). Real-time lexicon-free
scene text localization and recognition. Transactions
on pattern analysis and machine intelligence (PAMI),
38(9):1872–1885.
Nguyen, D., Delalandre, M., Conte, D., and Pham, T.
(2019). Performance evaluation of real-time and
scale-invariant log operators for text detection. In
International Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applications
(VISAPP), pages 344–353.
Ray, A., Shah, A., and Chaudhury, S. (2016). Recogni-
tion based text localization from natural scene images.
In International Conference on Pattern Recognition
(ICPR), pages 1177–1182.
Shivakumara, P. and Phan, T. (2010). A laplacian approach
to multi-oriented text detection in video. Transactions
on pattern analysis and machine intelligence (PAMI),
33(2):412–419.
Vijayalaksmi, S. and Punithavalli, M. (2012). A fast ap-
proach to clustering datasets using dbscan and pruning
algorithms. International Journal of Computer Appli-
cations (IJCA), 60(14).
Wang, H., Rong, X., and Tian, Y. (2019). Towards accu-
rate instance-level text spotting with guided attention.
In International Conference on Multimedia and Expo
(ICME), pages 994–999.
Wang, Y., Shi, C., Xiao, B., Wang, C., and Qi, C. (2018).
Crf based text detection for natural scene images us-
ing convolutional neural network and context infor-
mation. Neurocomputing, 295:46–58.
Xu, H., Lu, C., Berendt, R., and Jha, N. (2016). Auto-
matic nuclei detection based on generalized laplacian
of gaussian filters. Journal of biomedical and health
informatics, 21(3):826–837.
Yang, H., Wang, C., Che, X., Luo, S., and Meinel, C.
(2015). An improved system for real-time scene text
recognition. In International Conference on Multime-
dia Retrieval (ACM), pages 657–660.
Zhang, C., Liang, B., Huang, Z., En, M., and Han, J. (2019).
Look more than once: An accurate detector for text of
arbitrary shapes. arXiv preprint:1904.06535.
Zhang, C., Yao, C., Shi, B., and Bai, X. (2015). Automatic
discrimination of text and non-text natural images. In
International Conference on Document Analysis and
Recognition (ICDAR), pages 886–890.
Zhong, Z., Sun, L., and Huo, Q. (2018). An anchor-free re-
gion proposal network for faster r-cnn based text de-
tection approaches. arXiv preprint:1804.09003.
Zhou, X., Yao, C., Wen, H., and Wang, Y. (2017). East:
an efficient and accurate scene text detector. In Inter-
national conference on Computer Vision and Pattern
Recognition (CVPR), pages 5551–5560.
Fast Scene Text Detection with RT-LoG Operator and CNN
245
