
Deep Body-pose Estimation via Synthetic Depth Data:
A Case Study
Christopher Pramerdorfer
1,2
and Martin Kampel
2
1
Cogvis, Vienna, Austria
2
Computer Vision Lab, TU Wien, Vienna, Austria
Keywords:
Deep Learning, Synthetic Depth Data, Body-pose Estimation.
Abstract:
Computer Vision research is nowadays largely data-driven due to the prevalence of deep learning. This is one
reason why depth data have become less popular, as no datasets exist that are comparable to common color
datasets in terms of size and quality. However, depth data have advantages in practical applications that involve
people, in which case utilizing cameras raises privacy concerns. We consider one such application, namely
3D human pose estimation for a health care application, to study whether the lack of large depth datasets
that represent this problem can be overcome via synthetic data, which aspects must be considered to ensure
generalization, and how this compares to alternative approaches for obtaining training data. Furthermore, we
compare the pose estimation performance of our method on depth data to that of state-of-the-art methods for
color images and show that depth data is a suitable alternative to color images in this regard.
1 INTRODUCTION
Current research in Computer Vision is highly data-
driven due to the prevalence of deep learning, which
has enabled significant performance gains in many
fields such as image classification (He et al., 2016)
and human pose estimation in color images (Cao
et al., 2018). However, large datasets are required to
be able to fully utilize the potential of Deep Learning,
which are not always available.
This presumably is an important reason why depth
data have become less popular in Computer Vision re-
search after a surge in interest following the release of
the Kinect depth sensor (Shotton et al., 2011). This is
despite depth data having practical advantages over
color (or grayscale) images. This applies in particu-
lar to practical applications that involve people, where
utilizing video cameras raises privacy concerns and
the reluctance of users due to feeling monitored. In
some practical cases, this effectively precludes tech-
nology based on color images for this reason.
One such example that we focus on in this paper is
human pose estimation for identifying unhealthy sit-
ting positions at the workplace in order to promote the
long-term health of office workers by raising aware-
ness. This task also naturally favors depth data as it
requires 3D pose estimation, which is more intuitive
in depth data than in color image data. However, there
are no large depth datasets available that closely rep-
resent this problem and acquiring such a dataset is
a considerable effort that involves recruiting a large
number of people. This is a common problem that
hinders progress in the corresponding research fields.
In this paper, we discuss and compare different ap-
proaches to address this problem by obtaining suitable
training data. One approach that is the focus of our
study is utilizing synthetic depth data created specif-
ically for this purpose. Depth data synthesis allows
creating datasets of virtually any size and with accu-
rate labels with comparatively little effort. This not
only applies to pose estimation but to most applica-
tions that involve human participation and depth data.
Yet despite these advantages there are only few syn-
thetic depth datasets and works that utilize such data,
particularly works based on deep learning. Whether
this is due to issues with generalization of trained
models to real data or for other reasons is unclear.
We aim to shed light on this matter by train-
ing Convolutional Neural Networks (CNNs) for hu-
man pose estimation on synthetic depth data and then
study their performance on synthetic validation data
as well as real test data. We compare the results
to alternative approaches for obtaining training data,
namely (i) acquiring a limited amount of real data
that reflect the problem, (ii) adapting an existing real
dataset for this purpose, and (iii) adapting an exist-
318
Pramerdorfer, C. and Kampel, M.
Deep Body-pose Estimation via Synthetic Depth Data: A Case Study.
DOI: 10.5220/0008941303180325
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
318-325
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ing synthetic dataset. This enables us to investigate
the applicability of training CNNs on synthetic depth
data for solving practical problems in the context of
possible alternatives. Our work is based on (Pramer-
dorfer et al., 2019), which shows that utilizing syn-
thetic depth data for human pose estimation is feasible
but lacks studies on how this compares to other ap-
proaches, means necessary for generalization across
datasets, and the effect of sensor noise simulation.
Furthermore, we compare these results to the state
of the art in 2D body pose estimation in color data for
an indication of how depth-data-based human pose
estimation performs compared to the more popular
color-data-based methods. To the best of our knowl-
edge, this is the first study of this kind.
The results show that utilizing synthetic training
data outperforms all other approaches in terms of
body pose estimation performance on a common re-
alistic test dataset. Acquiring a limited amount of re-
alistic training data, a popular alternative in practice,
performs significantly worse despite transfer learning
to address the small dataset size. The comparison
with color-based methods indicates that pose estima-
tion in depth data is possible with similar accuracy.
The results underline that depth data are a viable al-
ternative to color data for human pose estimation and
that deep learning from suitable synthetic data can
outperform other data acquisition strategies.
This paper is structured as follows. Section 2 cov-
ers related works on human pose estimation and syn-
thetic depth data. In Section 3 we discuss the prob-
lem considered in this case study and the different ap-
proaches for acquiring training data in more detail.
Our pose estimation method is explained in Section 4
while Section 5 presents the experiments and results,
and Section 6 concludes the paper.
2 RELATED WORK
Human Pose Estimation. Human pose estimation in
color images via deep learning is a popular research
topic. A seminal work in this field is (Toshev and
Szegedy, 2014), in which a CNN is trained for 2D
keypoint regression. More recent works such as (Cao
et al., 2018) and (Fang et al., 2017) perform dense
keypoint (heat-map) prediction for improved perfor-
mance. A limitation of these methods is that they pre-
dict 2D poses. 3D pose estimation from single im-
ages is more challenging than the 2D variant due to
the larger pose space and ambiguities caused by per-
spective projection. Methods that perform well at this
task have been proposed only recently. A popular ap-
proach is to first predict 2D keypoints, which are then
mapped to 3D. In (Chen and Ramanan, 2017) this
mapping is accomplished using a similarity search in
a large dataset of pairs of 2D and 3D keypoints. The
authors of (Sun et al., 2018) present an extension of
CNN heat-map prediction that supports 3D poses.
In contrast, there are few recent works that utilize
depth data. Kinect’s pose estimation method (Shotton
et al., 2011) is perhaps the most well-known example
of utilizing synthetic depth data for this purpose but
its performance is no longer competitive (Haque et al.,
2016). Moreover the method is based on classification
forests, which may generalize from synthetic data to
real data differently than CNNs. (Haque et al., 2016)
presents a patch-based method for 3D pose estimation
in depth data using a combination of a CNN and a re-
current neural network. Two more recent works are
(Guo et al., 2017) and (Moon et al., 2018). The for-
mer proposes a multi-stage network architecture for
3D pose estimation from depth maps while the lat-
ter both processes and predicts keypoints in 3D voxel
grids. We utilize a simpler network architecture that
processes depth map patches. The work that is most
closely related to ours is (Pramerdorfer et al., 2019),
which also covers upper-body pose estimation and
synthetic training data. However, the paper focuses
on pose classification and lacks comparative studies.
Synthetic Depth Data. To our knowledge, (Shotton
et al., 2011) was the first work to demonstrate the po-
tential of utilizing synthetic data for 3D pose estima-
tion in depth maps. The work is still one of only few
examples and, as mentioned before, not based on deep
learning. The most comprehensive public dataset that
includes depth maps of people is SURREAL (Varol
et al., 2017). We include this dataset in our studies for
comparison. (Pramerdorfer et al., 2019) is another ex-
ample where synthetic data are used successfully for
pose estimation purposes.
3 3D POSE ESTIMATION
We consider the task of estimating 3D coordinates of
six face and upper-body keypoints, namely the nasion
(intersection of the frontal bone and the two nasal
bones of the human skull), chin center, front of the
throat, manubrium, as well as the left and right shoul-
ders. All keypoints lie on the skin surface. These key-
points were found to be important for identifying un-
healthy sitting postures in (Pramerdorfer et al., 2019).
3.1 Test Dataset
We evaluate each training data approach using the
same test dataset, which was presented in (Pramer-
Deep Body-pose Estimation via Synthetic Depth Data: A Case Study
319

dorfer et al., 2019). This dataset consists of 1707
depth maps that were recorded using an Orbbec As-
tra depth sensor. In each sample, one of 31 people
was simulating one of 15 common healthy and un-
healthy sitting poses under supervision. Ground-truth
3D keypoint coordinates were obtained using a pro-
fessional motion capture system. Figure 1 shows a
sample from this dataset, highlighting missing and
noisy data around object borders and at steep angles.
Figure 1: Visualization of a sample from the test dataset.
Brighter pixels represent further distances.
3.2 Training Approaches and Datasets
We compare the following approaches to obtaining
training data in terms of their performance on the
common test set. This allows us to assess the suitabil-
ity of depth data synthesis for solving practical prob-
lems and to compare this approach to alternatives.
Data Synthesis. One approach is to generate syn-
thetic depth data that closely represent the task at
hand. This it allows creating datasets of an arbitrary
size with comparatively low effort and thus costs.
However the resulting depth maps are not realistic
in terms of sensor noise, clothing, and background
objects, which may impact the generalization perfor-
mance of trained models to real data.
We implement this approach using the synthetic
dataset presented in (Pramerdorfer et al., 2019). The
dataset comprises 50,000 depth maps with accurate
3D ground-truth coordinates for all keypoints consid-
ered. The depth maps were rendered from 3D models
of synthetic humans in various sitting poses. These
models were created using the Blender 3D modeling
software (15,000 models) and include hair and differ-
ent facial expressions but no clothing. For increased
realism, the depth maps also depict desks, chairs, and
a background object. Figure 2 shows an example.
We consider two versions of this dataset, one with-
out sensor noise and one with simulated noise using a
method based on (Xu and Cheng, 2013). This enables
us to study whether noise simulation can improve the
generalization performance.
Data Recording. Another approach is to record and
label an own dataset that represents the problem to
Figure 2: Visualization of a sample from the synthetic
dataset. Brighter pixels represent further distances.
solve. This represents the standard approach for solv-
ing a problem in a data-driven fashion. However, de-
pending on the problem and available resources, the
amount of data obtainable this way is limited. On the
other hand, the sample quality is higher than with data
synthesis as the depth maps are realistic.
To represent this approach in our case study, we
recorded 17 colleagues for a short period. During
this time, the people continued their work in front of
their computer screens. The sensor was an Orbbec
Astra that was placed on top of the computer screens.
450 random frames were extracted from the result-
ing recordings and the keypoint image coordinates
were marked with the help of color images that were
recorded along with the depth data and registered with
the depth maps. On this basis, ground-truth coordi-
nates were defined based on depth map lookups at the
individual image coordinates. We refer to this dataset
as the office dataset.
Adapting a Realistic Dataset. An alternative that
might be applicable depending on the task at hand is
to adapt an existing realistic dataset to one’s needs. In
the context of this study, this means taking an existing
body-pose estimation dataset and calculating missing
ground-truth keypoints based on other available key-
points if possible. This has the advantage of taking
less effort than recording and labeling a new dataset
and can result in larger amounts of data. On the other
hand, the resulting data might not reflect the task at
hand accurately as adapting the labels (inferring key-
points) is not always possible without errors.
We utilize the ITOP dataset (Haque et al., 2016)
to represent this approach, restricting to the subset of
frontal views (22,854 samples) as these samples rep-
resent the example problem more closely than the top
views. We chose this dataset because it is the largest
body pose estimation dataset available. The limita-
tions of this dataset in terms of adaptation to our prob-
lem are that it does not include labels for the nasion,
chin, and throat keypoints and these keypoints can-
not be inferred reliably from other existing keypoints.
We represent the nasion keypoint by ITOP’s head key-
point but ignore the chin and throat keypoints in the
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
320

experiments for this reason. The dataset also lacks
a manubrium keypoint but tests showed that its neck
keypoint agrees well with this keypoint (the paper
does not state how the keypoints are defined exactly).
Adapting a Synthetic Dataset. The last approach we
consider is to adapt an existing synthetic dataset for
our purposes. This is less effort than creating an own
synthetic dataset but has the same disadvantages as
adapting existing realistic datasets.
We utilize the SURREAL dataset (Varol et al.,
2017) for this purpose, which is the largest synthetic
dataset available that includes depth maps. We ignore
all samples in which the person is depicted from the
side or behind according the the shoulder coordinates,
resulting in a dataset of 259,417 samples. The dataset
lacks nasion, chin, throat, and manubrium keypoints.
We thus estimate the throat from the upper and lower
neck keypoints and the manubrium from the left and
right collarbones. The nasion and chin keypoints are
not estimated from other keypoints as this is not pos-
sible without significant errors.
4 METHODS
Our pose estimation method predicts 3D camera co-
ordinates for all keypoints considered. The core com-
ponent is a CNN that predicts image coordinates and
distances for all keypoints from depth map patches
that depict a person. These image coordinates are then
converted to camera coordinates by inverting the ge-
ometric transformations applied during patch extrac-
tion and using known camera intrinsics.
4.1 Patch Extraction
Given a depth map and a list of ground-truth keypoint
coordinates, we first locate the face of the depicted
person. For this purpose we estimate the face bound-
ing box center and size based on the nasion and chin
keypoints. This bounding box is then extended by
a multiplicative factor to obtain a bounding box that
captures both the head and upper-body of the person.
Our method thus does not include automatic face
or person detection. This is to prevent face detec-
tion errors from affecting the pose estimation studies
that are the focus of this paper. It would be straight-
forward to extend our method accordingly though, by
replacing the face detection approach described in the
previous paragraph with any face detector.
We then compute the median distance in the face
region and threshold the depth map on this basis, set-
ting all pixels that differ by more than 75 cm from
this distance to zero. This is comparable to the cube-
based segmentation approach of (Guo et al., 2017)
and (Moon et al., 2018) and removes most back-
ground clutter. Finally the person region is extracted
and resized to a size of 100 × 100 pixels.
This procedure introduces consistency between
datasets, as shown in Figure 3. It also invalidates pro-
jective geometry in the sense that patches depicting
people that are further away from the camera are not
necessarily smaller. This in turn makes depth-scatter
data augmentation (covered below) intuitive.
Figure 3: Visualizations of samples from the test (left), syn-
thetic (center), and ITOP (right) datasets after patch extrac-
tion. This results in a similar person scale and alignment
across datasets (cf. Figures 1 and 2).
4.2 Network Architecture
Our network architecture is based on ResNet-18 due
to its solid performance and efficiency (He et al.,
2016). We modify this architecture in two ways. First,
we prepend a custom layer that replicates the chan-
nels of single-channel inputs as many times as chan-
nels expected by the first convolutional layer. This en-
ables compatibility with models that were pre-trained
on color images and thus facilitates transfer learning.
Second, we replace the final global average-pooling
layer with concat-pooling (Howard and Ruder, 2018),
i.e. a combination of average- and max-pooling. The
network ends with a linear layer with 3k neurons, with
k being the number of keypoints.
The resulting architecture is simpler than those in
related works, which perform e.g. voxel-based (Moon
et al., 2018) or dense prediction of keypoint confi-
dence maps (Cao et al., 2018). We choose a simpler
architecture as (i) our primary goal is to study rela-
tive performance gains rather than outperforming ex-
isting methods, and (ii) using a simpler architecture
might expose limitations in cross-dataset generaliza-
tion more than more complex architectures.
4.3 Training and Validation
As in (Pramerdorfer et al., 2019), we train this net-
work to predict keypoint image coordinates and dis-
tances as opposed to predicting camera coordinates.
This has the advantage of facilitating patch extraction
(which entails converting the ground-truth labels ac-
cordingly) as well as data augmentation (geometric
Deep Body-pose Estimation via Synthetic Depth Data: A Case Study
321

transformations such as random crops and image rota-
tions can be applied to image coordinate labels easily,
which is contrast to camera coordinates). Predicting
distances instead of inferring them from depth maps
based on the predicted image coordinates has the po-
tential advantage of allowing the model to become ro-
bust to occlusions by e.g. people’s arms.
Instead of training from scratch, we employ trans-
fer learning of a model that was trained on ImageNet
(Russakovsky et al., 2015), i.e. for classification of
color images. This is for two reasons. First, it is a
best practice when training on small datasets, which
applies to the office dataset. Second, this avoids per-
formance fluctuations due to network parameters be-
ing initialized randomly during training, which is im-
portant to ensure comparability of the results.
The model was pre-trained on images whose pixel
values were mapped to [0, 1] via division by v = 255.
This must be replicated for the depth data, which re-
quires setting v carefully as in this cases pixel values
encode distances. One consideration is that we study
the cross-dataset performance and these datasets dif-
fer significantly in terms of depicted people’s dis-
tances, as visible in Figure 4. One approach would
be to set v = 10 m, which covers all datasets consid-
ered. However this lowers the contrast unnecessarily
for datasets that do not cover the full distance range,
which is common. We thus instead set v based on the
distribution of the target datasets. Specifically, we set
v = max(l
99
, t
99
) + 1 m, with l
p
and t
p
denoting the
p% percentiles of the training and test dataset. This
ensures that all body parts of at least 99% of sam-
ples are mapped to [0, 1] while maximizing the pos-
sible contrast. Afterwards we normalize the samples
by subtracting the mean and dividing by the standard
deviation of ImageNet, as done during pre-training.
The loss function minimized during training is a
weighted sum of two Huber losses (Huber, 1992) that
penalize image coordinate and distance prediction er-
rors, respectively. The weights are set such that both
losses contribute roughly equally to the overall loss.
We minimize this loss using the Adam optimizer with
weight decay set as in (Loshchilov and Hutter, 2017).
4.4 Data Augmentation
Figure 4 shows the distance distributions of people ac-
cording to their ground-truth nasion keypoints for all
datasets, highlighting that these distributions are very
different and that there is little overlap. On this ba-
sis, we cannot expect models to generalize well across
datasets and particularly to the test set.
To overcome this problem, we put forward a
training data augmentation technique called depth-
0 2 4
6
8
0
2
4
·10
−3
nasion camera distance [m]
density
Test
Synth
Office
ITOP
SURREAL
Figure 4: Person distance distributions of all datasets in
terms of the ground-truth nasion keypoint (head and throat
for ITOP and SURREAL, respectively).
scattering. During training and for each sample,
this technique samples a random scalar from [s
0
, s
1
],
which it adds to all non-zero inputs and ground-truth
distances. This ensures that the distances of samples
seen during training capture both the training (and
validation) set and the test set if s
0
and s
1
are set ac-
cordingly, thereby enabling the models to generalize
to the latter. We set s
0
and s
1
similarly to v, namely
s
0
= min(0, t
1
− l
5
) and s
1
= max(0, t
99
− l
95
).
In addition we augment the training data via ran-
dom crops to 88 × 88 pixels and random rotation at
angles up to ±10 degrees.
5 EXPERIMENTS
All models are trained twice and the reported results
are averages of both runs in order to limit the impact
of random data augmentation on the results.
5.1 Impact of Training Data
We first study how the training data approach affects
the test performance, with a focus on how much the
performance decreases by transitioning from the dif-
ferent training sets to the common test dataset. The
datasets are abbreviated as follows: SY is the syn-
thetic dataset without simulated noise, SN is the same
dataset with simulated noise, OF is the office dataset,
IT is the ITOP dataset, and SU is SURREAL.
We reiterate that the individual datasets do not de-
fine keypoints identically, with some including no de-
tailed definitions as all. This leads to systematic er-
rors that cannot be avoided or corrected in a princi-
pled way. This is a compromise that often cannot be
avoided when adapting existing datasets to the task
at hand, as in this study. Heuristics such as subtract-
ing offset vectors based on validation data would also
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
322
mask systematic errors due to other causes, which is
why we do not apply them in this analysis.
Validation Performance. In order to establish base-
lines, we first compare the results on the individual
validation sets and independently for each keypoint.
The results are reported as the median error when pre-
dicting 3D coordinates (Euclidean distances between
predictions and ground-truths) in cm.
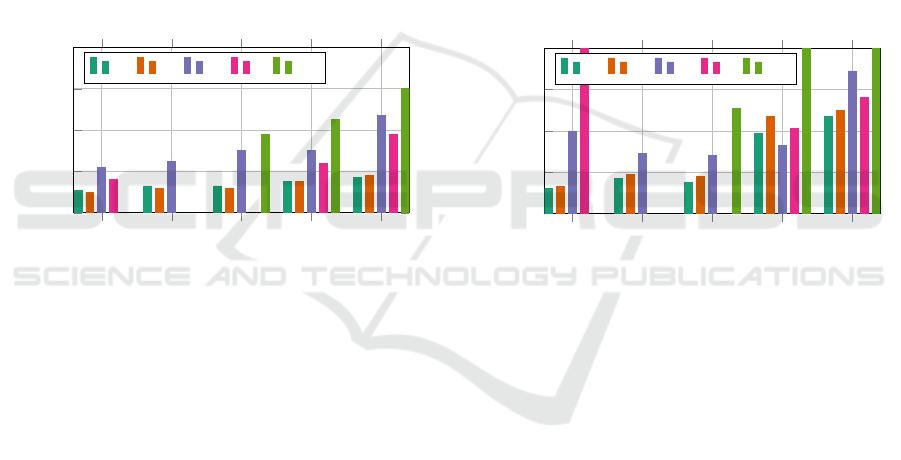
Figure 5 visualizes these results. Missing entries
are due to some datasets missing certain keypoints.
The results on SY and SN are comparable, with dif-
ferences attributable to randomness during training.
Those on IT are better than on OF despite the former
dataset being more challenging, possibly due to the
small size of the latter. SU shows the worst perfor-
mance despite being a synthetic dataset and the largest
in size, suggesting that it is more challenging in terms
of poses. The shoulders are the hardest do predict ac-
curately, for all datasets considered.
NAS CHI THR MAN SHO
0
2
4
6
8
keypoint
error [cm]
SY SN OF IT SU
Figure 5: Validation error medians for all datasets and key-
points. NAS is the nasion, CHI the chin, THR the throat,
MAN the manubrium, and SHO are the shoulders.
Test Performance. Figure 6 shows the same perfor-
mance numbers for the test data, highlighting how
well models trained on each dataset perform on the
common test dataset. This in turn shows how suit-
able each approach for obtaining training data is in
the context of this study. Models trained on SY and
SN achieve the best overall performance on the test
set. This confirms that training on synthetic depth
data that accurately represents the task at hand is su-
perior to the alternatives considered.
The models trained on SY perform consistently
better than those trained on SN, i.e. the same data but
with simulated sensor noise. This shows that noise
simulation was ineffective in this case, either because
the models are able to handle sensor noise themselves
or because the simulations did not reflect the actual
sensor noise characteristics well enough. We investi-
gate this matter in more detail below.
Training on a small but realistic dataset (OF), a
common approach if only limited data are available,
performs significantly worse than utilizing synthetic
data apart from the manubrium keypoint. A possible
reason for this exception is inaccurate marker place-
ment, as detailed below.
Training on IT, and thus the approach of adapting
a larger existing dataset to the task at hand, results in
a performance between the two aforementioned ap-
proaches for the manubrium and shoulder keypoints.
On the other hand, the models trained on this data
are unable to predict the nasion reliably. This was
expected as the IT dataset has only a head keypoint,
which was used in approximation in this case, and
is an example for systematic errors due to limits in
adapting existing datasets to other tasks.
Models trained on SU perform the worst on the
test data for all keypoints available. This is again
due to differences in the keypoint definitions (internal
vs. surface points) but also due to prediction errors
that are also apparent in the validation results.
NAS CHI THR MAN SHO
0
2
4
6
8
keypoint
error [cm]
SY SN OF IT SU
Figure 6: Test error medians for all training datasets and
keypoints. NAS is the nasion, CHI the chin, THR the throat,
MAN the manubrium, and SHO are the shoulders.
Generalization Gap. Comparing Figures 5 and 6
shows that the performance loss on the test data varies
significantly depending on the training set, with the
two synthetic datasets generalizing the best on aver-
age. This is unexpected as we assumed that tran-
sitioning from synthetic to real data would incur an
additional performance penalty. The version without
simulated noise (SY) generalizes consistently better
than the version with simulated noise (SN), which in-
dicates that the noise simulation method utilized does
not capture the sensor noise characteristics properly.
On both synthetic datasets, the generalization gap
for the manubrium and shoulder keypoints is much
larger than for the other keypoints. This is likely due
to a combination of the following reasons. First, re-
alistic conditions, namely clothing and sensor noise,
might affect these keypoints more than the others.
Second, a visual inspection indicates that the ground-
truth coordinates for these keypoints are not always
perfectly accurate. This is because the markers used
Deep Body-pose Estimation via Synthetic Depth Data: A Case Study
323
for obtaining these coordinates were glued to the skin
or clothing of the test subjects, which was harder to do
accurately for the manubrium and shoulder keypoints
than for the other keypoints. We will investigate this
circumstance more closely in the future.
In summary, the results show that using synthetic
depth data for training convolutional neural networks
is a promising alternative to the other approaches con-
sidered, namely to collecting a limited amount of real
training data as well as to adapt existing datasets that
do not closely reflect the task at hand.
5.2 Ablation Studies
We next assess the importance of simulating sensor
noise as well as depth-scattering in more detail.
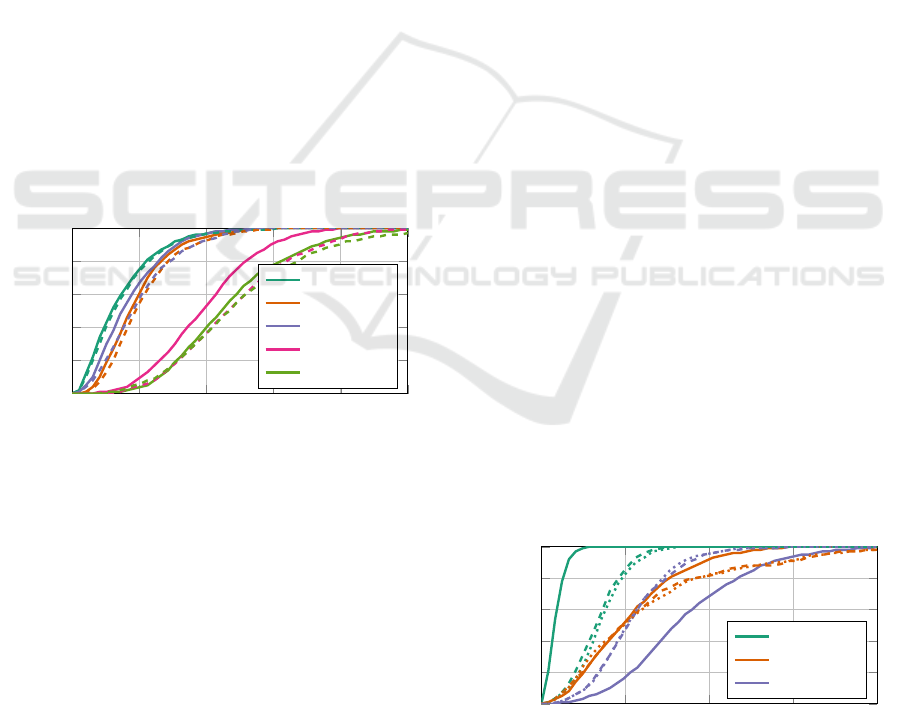
Sensor Noise Simulation. The previous results sug-
gest that the method for simulating sensor noise is in-
effective as the test errors of models trained on SY
(without simulated noise) are lower than those trained
on SN (with noise). Figure 7 shows more detailed test
results in the form of average precisions at 3D error
thresholds up to 10 cm. Training on simulated noise
increases the test errors significantly for the throat
and manubrium keypoints across the threshold range,
while the other changes are explainable by random-
ness in training. This confirms our earlier findings.
0 2 4
6
8 10
0
0.2
0.4
0.6
0.8
1
error threshold t [cm]
fraction below t
nasion
chin
throat
manubrium
shoulders
Figure 7: Average 3D keypoint precisions of models trained
on SY (solid lines) and SN (dashed lines).
Depth-scattering. In order to assess the impact of
depth-scattering on the test errors, we retrain the mod-
els on the SY, OF, and IT datasets without this form
of data augmentation and compare mean 3D keypoint
prediction errors over all keypoints.
In case of SY, disabling depth-scattering has no
significant effect on the errors while for OF and IT,
doing so increases the errors by over 500% in both
cases. This confirms that depth-scattering is manda-
tory for generalization across datasets with different
distance ranges but is neither beneficial nor detrimen-
tal otherwise (cf. Figure 4).
5.3 Color-based Methods
We next compare the keypoint image coordinate pre-
diction accuracy of our best models (trained on SY) to
state-of-the-art 2D pose estimators for color images,
namely OpenPose (Cao et al., 2018) and AlphaPose
(Fang et al., 2017). To do so, we run these detectors
at their default settings on the color frames of the test
set, which were recorded alongside the depth data.
The depth and color frames are registered, enabling us
to convert the available 3D ground-truth coordinates
to image coordinates for evaluation purposes. We
report PCKh scores (Andriluka et al., 2014), which
measure the fraction of predictions with an error be-
low t times the head size. The head size is estimated
as the distance between the nasion and manubrium,
and t is varied between 0 and 0.4.
For a fair comparison, the correct person is se-
lected manually if multiple persons are incorrectly
detected. Neither OpenPose nor AlphaPose locate
the nasion, which we calculate as the center between
both eye detections. OpenPose does not predict the
manubrium but tests showed that its neck keypoint
aligns closely with it. AlphaPose does not provide
either keypoint, so we estimate the manubrium as the
center between the shoulders. On this basis we re-
strict our comparison to the nasion, manubrium, and
shoulder keypoints as these are available in all cases
or can be estimated from other keypoints.
Figure 8 summarizes the results. OpenPose and
AlphaPose perform almost identically. This is in con-
trast to findings in the literature and might be because
the test dataset does not include particularly challeng-
ing poses. Our method outperforms both color-based
methods at predicting nasion and manubrium key-
points. For the manubrium, this may be in part due
to the keypoint estimation process. For the nasion,
this is not the case as the manubrium is defined as the
region between the eyes, as used for estimation. On
the other hand, the color-based method achieve sig-
nificantly higher scores for the shoulders.
0 0.1 0.2 0.3 0.4
0
0.2
0.4
0.6
0.8
1
error threshold t
fraction below t
nasion
manubrium
shoulders
Figure 8: Keypoint image coordinate prediction perfor-
mance on the test set of our method (solid lines) as well
as OpenPose (dashed lines) and AlphaPose (dotted lines).
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
324

In summary, these results indicate that 2D pose es-
timation in depth data is possible at an accuracy simi-
lar to 2D pose estimation in color images, suggesting
that depth data are suitable for this purpose in terms
of the achievable accuracy. However, given the di-
verging results and the limited number of keypoints
that are consistent across detectors, we aim to carry
out more studies in the future to confirm this.
6 CONCLUSIONS
We have presented a case study on how utilizing syn-
thetic depth data for solving a practical problem via
deep learning, namely 3D human pose estimation
for health care applications, compares to alternative
means for acquiring training data. The results show
that synthetic training data are a promising alterna-
tive particularly to acquiring own realistic data if this
results in a dataset that is small by deep learning stan-
dards, despite using transfer learning. We presume
that this applies for related problems such as face and
person detection in depth data as well as these tasks
are similar in terms of data characteristics. For the
future we plan to verify this empirically and to inves-
tigate why the sensor noise simulation method em-
ployed did not lead to conclusive results. On this basis
we hope to be able to develop an improved noise sim-
ulation method that helps to further reduce the gener-
alization gap from synthetic to real data.
ACKNOWLEDGEMENTS
This work was supported by the Austrian Research
Promotion Agency (FFG-855696).
REFERENCES
Andriluka, M., Pishchulin, L., Gehler, P., and Schiele, B.
(2014). 2D Human Pose Estimation: New Benchmark
and State of the Art Analysis. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
3686–3693.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh, Y.
(2018). OpenPose: Realtime Multi-Person 2D Pose
Estimation using Part Affinity Fields. arXiv preprint
arXiv:1812.08008.
Chen, C.-H. and Ramanan, D. (2017). 3D Human Pose Es-
timation = 2D Pose Estimation + Matching. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 7035–7043.
Fang, H.-S., Xie, S., Tai, Y.-W., and Lu, C. (2017). RMPE:
Regional Multi-Person Pose Estimation. In Interna-
tional Conference on Computer Vision.
Guo, H., Wang, G., Chen, X., and Zhang, C. (2017). To-
wards Good Practices for Deep 3D Hand Pose Esti-
mation. arXiv preprint arXiv:1707.07248.
Haque, A., Peng, B., Luo, Z., Alahi, A., Yeung, S., and
Fei-Fei, L. (2016). Towards Viewpoint Invariant 3D
Human Pose Estimation. In European Conference on
Computer Vision, pages 160–177.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep Resid-
ual Learning for Image Recognition. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 770–778.
Howard, J. and Ruder, S. (2018). Universal Language
Model Fine-Tuning for Text Classification. arXiv
preprint arXiv:1801.06146.
Huber, P. J. (1992). Robust Estimation of a Location Param-
eter. In Breakthroughs in statistics, pages 492–518.
Springer.
Loshchilov, I. and Hutter, F. (2017). Fixing Weight Decay
Regularization in Adam. CoRR, abs/1711.05101.
Moon, G., Yong Chang, J., and Mu Lee, K. (2018). V2V-
PoseNet: Voxel-to-Voxel Prediction Network for Ac-
curate 3D Hand and Human Pose Estimation from a
Single Depth Map. In IEEE Conference on Computer
Vision and Pattern Recognition, pages 5079–5088.
Pramerdorfer, C., Kampel, M., and Heering, J. (2019). 3D
Upper-Body Pose Estimation and Classification for
Detecting Unhealthy Sitting Postures at the Work-
place. In International Conference on Informatics and
Assistive Technologies for Health-Care, Medical Sup-
port and Wellbeing.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
geNet Large Scale Visual Recognition Challenge. In-
ternational Journal of Computer Vision, 115(3):211–
252.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-Time Human Pose Recognition in Parts from
Single Depth Images. In IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 1297–
1304. Ieee.
Sun, X., Xiao, B., Wei, F., Liang, S., and Wei, Y. (2018).
Integral Human Pose Regression. In European Con-
ference on Computer Vision, pages 529–545.
Toshev, A. and Szegedy, C. (2014). DeepPose: Human Pose
Estimation via Deep Neural Networks. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1653–1660.
Varol, G., Romero, J., Martin, X., Mahmood, N., Black,
M. J., Laptev, I., and Schmid, C. (2017). Learning
from Synthetic Humans. In IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 109–117.
Xu, C. and Cheng, L. (2013). Efficient Hand Pose Esti-
mation from a Single Depth Image. In International
Conference on Computer Vision, pages 3456–3462.
Deep Body-pose Estimation via Synthetic Depth Data: A Case Study
325
