
Segmentation of Moving Objects in Traffic Video Datasets
Anusha Aswath
1
, Renu Rameshan
1
, Biju Krishnan
2
and Senthil Ponkumar
2
1
Indian Institute of Technology, Mandi, Himachal Pradesh, India
2
Continental Tech Centre, Bengaluru, Karnataka, India
Keywords:
Multi-object Tracking, CNN Model, Re-identification, Instance Segmentation, Ground Truth, Interactive
Correction, Annotation Tool.
Abstract:
In this paper, we aim to automate segmentation of multiple moving objects in video datasets specific to traffic
use case. This automation is achieved in two steps. First, we generate bounding boxes using our proposed
multi-object tracking algorithm based on convolutional neural network (CNN) model which is capable of re-
identification. Second, we convert the various tracked objects into pixel masks using an instance segmentation
algorithm. The proposed method of tracking has shown promising results with high precision and success rate
in traffic video datasets specifically when there is severe object occlusion and frequent camera motion present
in the video. Generating instance aware pixel masks for multiple object instances of a video dataset for ground
truth is a tedious task. The proposed method offers interactive corrections with human-in-the-loop to improve
the bounding boxes and the pixel masks as the video sequence proceeds. It exhibits powerful generalization
capabilities and hence the proposed tracker and segmentation network was applied as a part of an annotation
tool to reduce human effort and time.
1 INTRODUCTION
Advanced Driver Assistance Systems (ADAS) are
systems with camera sensors for vision, radar sensors
for detection and lidar sensors for distance measure-
ments. The camera images and information obtained
from fusion of different sensors are utilized by com-
puter vision algorithms to train models to perform
functions like vehicle and pedestrian detection, traf-
fic sign recognition, lane change assist and assisted
speed control to name a few. Algorithms developed
for computer vision tasks require machine learning
models and deep neural networks to be trained. To
train these networks, huge amounts of labeled data are
required to obtain generalised results. The data avail-
able for ADAS mostly consists of long video record-
ings (some millions of kilometers).
Data labeling task requires human-in-the-loop to
annotate images using an annotation tool. Some of
the latest annotation tools provide markers for line,
box, polyline, polygon and pixel annotation. Mech-
anisms like superpixel (Achanta et al., 2012) or wa-
tershed (Beucher and Meyer, 1993) have also been
introduced for assisted pixel labeling. Artificial In-
telligence (AI) assisted web-based platforms are also
being developed for automating labeling of data. Cur-
rently, the effort for manual data labeling for one hour
of recording (which consists of 1500000 frames) is
149 hours for cars and 79 hours for pedestrians for
fine pixel masks (outlining the object). It is also of
concern that a company has a few hundreds of in-
house workers to do annotation. Hence a lot of capital
is invested by companies and time of individuals lost
for doing annotation.
Deep learning methods have helped in achiev-
ing state-of-the-art results in various computer vision
tasks. We shall utilize deep learning algorithms to
segment multiple moving objects and identify the ob-
jects with same labels throughout the video. We shall
apply this solution as a part of an annotation tool to
automate labeling process. As the segmentation of
multiple objects requires a bounding box around the
object to be segmented, we start with the process of
tracking for multiple objects in a video frame. This is
followed by segmentation of objects inside the bound-
ing boxes obtained. We also aim at interactive correc-
tions for labeling apart from only reviewing and ad-
justing the generated labels on the annotation tool. In
case of any correction required in the bounding boxes
generated, the annotator should be able to shift the
box and consequently improve the tracking accuracy
in further frames which is enabled in our solution.
Though there exist various deep learning algo-
rithms which achieve multiple object tracking (Chu
Aswath, A., Rameshan, R., Krishnan, B. and Ponkumar, S.
Segmentation of Moving Objects in Traffic Video Datasets.
DOI: 10.5220/0008940403210332
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 321-332
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
321

et al., 2017; Gordon et al., 2018), we propose to use
a confidence score based CNN tracker that initalizes
on a target and updates online for tracking (which also
facilitates interactive corrections). For tracking multi-
ple objects, a single object tracker (Yun et al., 2017) is
modified to a multi-object tracker using multi-domain
learning technique (Nam and Han, 2016). The posi-
tion of the target in the next frame is predicted using
the appearance and motion information to predict lin-
ear transformations in the form of certain actions. To
automate the process of incorporating new objects in
the tracking framework we make use of a data associ-
ation module. It uses similarity learning to associate
detections with their corresponding tracks and to han-
dle re-identification.
For instance segmentation, using the multiple
bounding boxes for all the tracked objects in a video
frame we outline the objects using polygon vertices
predicted by Polygon RNN++ (Acuna et al., 2018).
This mimics the common technique used for gener-
ating pixel masks through polygon or polyline mark-
ers. We combine these two solutions for segmenting
multiple objects in traffic videos and thus provide a
solution to reduce the effort of manual annotation for
multiple object instances.
This is an application based paper which aims to
assist annotation of multiple objects in traffic video
datasets. The main contributions of this paper are
summarized as follows-
• A novel multiple object tracking network for an-
notation
– CNN based multi-object tracker with online up-
date based on a dynamic tracking score for each
object.
– Maintain track with consistent identities during
occlusions or complex interactions.
– Perform re-identification of targets for traffic
datasets on a search area determined by the mo-
tion model.
• Integrating the tracker and segmentation network
as part of a custom label tool.
The rest of the paper is organised as follows: Sec-
tion 2 gives the related work, the proposed solution is
discussed in Section 3, followed by results and con-
clusion in Sections 4 and 5, respectively.
2 RELATED WORK
Multi-object tracking (MOT) is the problem of si-
multatneously solving for the trajectories of individ-
ual objects, while maintaining their identities over
time through occlusions, clutter and complex inter-
actions. There are two broad categories for solving
the MOT problem - 1) global data association and 2)
visual tracking. Global data association method for-
mulates the tracking problem as forming trajectories
by recursively connecting the detections. It uses opti-
mization methods to minimize cost functions formu-
lated through network flow (Pirsiavash et al., 2011) or
using continuous energy minimization (Milan et al.,
2013). It also includes linear programming (Jiang
et al., 2007) and MAP (Maximum a posteriori) es-
timation (Pirsiavash et al., 2011) to track multiple
objects simultaneously. Tracking-by-detection is a
tracking paradigm where tracked objects are linked to
detections, treated as a data association problem (An-
driluka et al., 2008). All the above methods heavily
rely on the detection performance.
With the increasing work on appearance based
models for visual tracking, trackers can be broadly
classified into two groups - discriminative and gen-
erative trackers. Discriminative methods define the
tracking problems as a binary classification task,
which attempts at designing a classifier to separate
targets from their surrounding background. It is
important to update the target appearance model to
take into account appearance changes, cluttered back-
ground, blur or deformations. Various online up-
date techniques include online mixture model (Jepson
et al., 2003), incremental subspace update (Ross et al.,
2008) and online boosting (Grabner et al., 2006). For
discriminative models, the main issue has been im-
proving the sample collection part to make the online-
trained classifier more robust (Grabner et al., 2008;
Babenko et al., 2009; Kalal et al., 2010; Hare et al.,
2015).
A discriminative single object tracker can also be
used for tracking multiple objects (Chu et al., 2017).
This also demonstrates the problem of online update
in MOT scenarios which include complex interactions
among targets. For tracking multiple objects, we pro-
pose to use a single object tracker which uses a so-
phisticated appearance model through online update
along with incorporating a motion model for each tar-
get (Yun et al., 2017). The proposed tracker carefully
updates the model in MOT scenarios by maintaining
the discriminative appearance model through time.
To handle this issue of maintaining the temporal
information of the object to avoid drifts, we resolve to
generative method of tracking. These methods search
for the most similar regions of the object appearance
at each frame, based on learning only the appearance
model for object representation. In correlation filter
based trackers features are learnt by minimizing the
distance between embeddings (measuring similarity)
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
322

learnt from the network. Pre-trained CNN models are
used to obtain feature maps to correlate two images
(Tao et al., 2016). A fully convolutional network that
produces a score map from the correlation of a tar-
get and search patch was proposed (Bertinetto et al.,
2016) with element-wise logistic loss function on the
score map. New loss functions such as triplet loss
were applied to Siamese networks to learn embed-
dings (Zhuang et al., 2016). We shall use the offline
model for similarity measurement (Bertinetto et al.,
2016) for maintaining temporal information while up-
dating our network for tracking.
Recurrent Neural Network (RNN) is another ar-
chitecture which can be used to model the object
motion information along with modeling appearance
information. GOTURN (Held et al., 2016) uses a
CNN model to regress the location of the object in
next image from the previous image. This was im-
proved upon in Real-time Recurrent Regression net-
work (Re3 tracker) (Gordon et al., 2018) using an
LSTM (Long Short Term Memory) to model the tem-
poral dependencies. The input to the LSTM is in the
form of current and previous frame which helps it
learn motion information between pixels. Re3 adapts
itself to appearance changes in a single forward pass,
through its LSTM cell states and requires resetting at
every 32 frames to avoid model drift. This resetting is
done as the LSTM states are trained only to remem-
ber a maximum of past 32 cell states of the tracked
object. It is reset with the first forward pass of the
tracked object to retain the previous information in-
stead of setting it all to zero. However it easily drifts
in case of significant occlusions and does not track the
same object on disappearance and reappearance of the
object or during object interactions.
Semi-automatic semantic segmentation is used to
obtain labels with human-in-the-loop to obtain guid-
ing signals like bounding boxes, points, edges, scrib-
bles etc. Interactive mechanisms like DeepMask
(Pinheiro et al., 2015) provide instance segmentation
through its pixel wise prediction map inside a bound-
ing box. Deep Extreme Cut (Xu et al., 2017) offers
a guided and interactive annotation method using ex-
treme points. The grab-cut based method extended
to Deep Grab Cut (Maninis et al., 2018) produces
pixel-wise classification inside bounding boxes. All
these techniques classify each pixel inside the bound-
ing box as an object class. Such methods are unsuit-
able as the labelers need to unmark each pixel care-
fully when labeled incorrectly, which makes it time
consuming. Hence, we propose to use polygon ver-
tices for semantic segmentation which is generated
through deep learning based network (Acuna et al.,
2018).
3 PROPOSED SOLUTION
In this work, we provide an instance aware segmen-
tation solution for multiple objects in traffic video
data sets. Our solution is two-fold, firstly the track-
ing of multiple objects through traffic videos and sec-
ondly the segmentation of these object instances. The
proposed multi-object tracker is discussed along with
addressing the problems of maintaining consistent
tracks in MOT scenarios. This is followed by using
the boxes to generate instance aware masks using a
segmentation algorithm.
3.1 Tracking Multiple Objects using a
Single Object Tracker
We have modified Action Decision Network (ADNet)
(Yun et al., 2017), which is a single object tracker for
tracking multiple objects.
3.1.1 Overview of Single Object Tracker
ADNet tracks objects through a sequential Markov
Decision Process (MDP) which consists of a set of
states and actions. The actions (a
t
) are taken on the
basis of the probabilities predicted by the trained net-
work to provide transitions between states. The state
information consists of appearance and motion infor-
mation. The appearance information (p
t
) is the im-
age (F
l
) cropped by the bounding box and resized to
112 × 112 × 3. The motion information (d
t
) is given
by a constant vector of length 110 which includes the
past ten actions encoded in the form of one-hot eleven
length vector. In case the action taken is left then the
bounding box is moved as [x − δx, y, w, h], where δ is
some small value. The appearance information for the
next step in the MDP (p
t+1
) is given by the image crop
obtained from the moved bounding box. The motion
information (d
t+1
) is given by adding the left action
one-hot vector and removing the past action vector
using the last in first out rule.
This process of tracking through sequential ac-
tions is continued for the next time steps in the MDP if
the class confidence score for a given target is greater
than 0.5. The tracking is continued for a maximum of
twenty sequential actions or till stop action is reached
on the image (F
l
). Once this iteration for taking
sequential actions gets completed the bounding box
from the previous frame position (F
l−1
) is said to have
reached the target in F
l
. This is taken to be the first
box in the next frame (F
l+1
) to start with the MDP
to reach the target in F
l+1
. The network architecture
and tracking mechanism using sequential actions and
class confidence scores is illustrated in Figure 1.
Segmentation of Moving Objects in Traffic Video Datasets
323
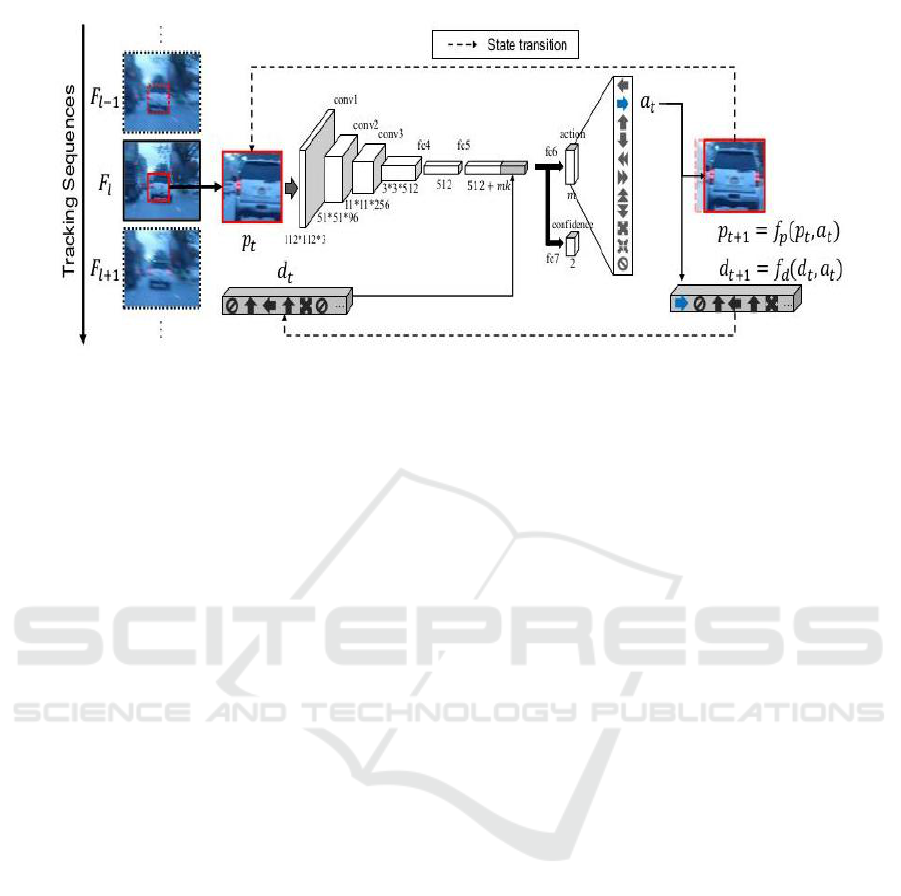
Figure 1: Action Decision Network for tracking single object. The network architecture and tracking sequence illustration is
taken from (Yun et al., 2017).
If the class confidence score is less than 0.5 for
the given state information then the tracking process
is said to have failed and is stopped. We then perform
redetection by sampling which involves sampling a
set of candidate patches around the last bounding box
obtained in the MDP. The candidate patch that has the
highest class confidence score is selected as the target
for continuing the track as given in Equation 1.
b = arg max
b
i
[class confidence scores(b
i
)]
(1)
where i denotes the index of the sampled patch and
the box with the highest class confidence score is se-
lected.
During tracking, online adaptation for structured
data (such as video) is performed for the targets using
p-n (positive-negative) learning (Kalal et al., 2010).
p (positive) and n (negative) samples are collected
from the successfully redetected position whenever
the class confidence score is greater then 0.5. Super-
vised training is done for the final layers using patches
(p
i
) sampled randomly around the tracked patch (t p).
The corresponding action labels (a
i
) and class confi-
dence labels (c
i
) are obtained for the patches (p
i
) (Yun
et al., 2017) through equation 2.
a
i
= arg max
a
IoU(p
a
i
,t p)
c
i
=
(
1, if IoU(p
i
,t p) > 0.7
0, otherwise
(2)
where IoU refers to intersection over union and
a
i
refers to that action a on patch p
i
that gave the
maximum IoU with the redetected patch. All sample
patches that have an IoU greater than 0.7 with the re-
detected patch are positive class and the rest are neg-
ative class. Cross entropy loss is used to train the f c6
and f c7 layers for actions and class confidence scores.
The samples from recent successfully tracked frames
are collected for short-term update. For training the
action layer only positive samples are used whereas
for the class confidence layer a discriminative classi-
fier is trained using both positive and negative sam-
ples.
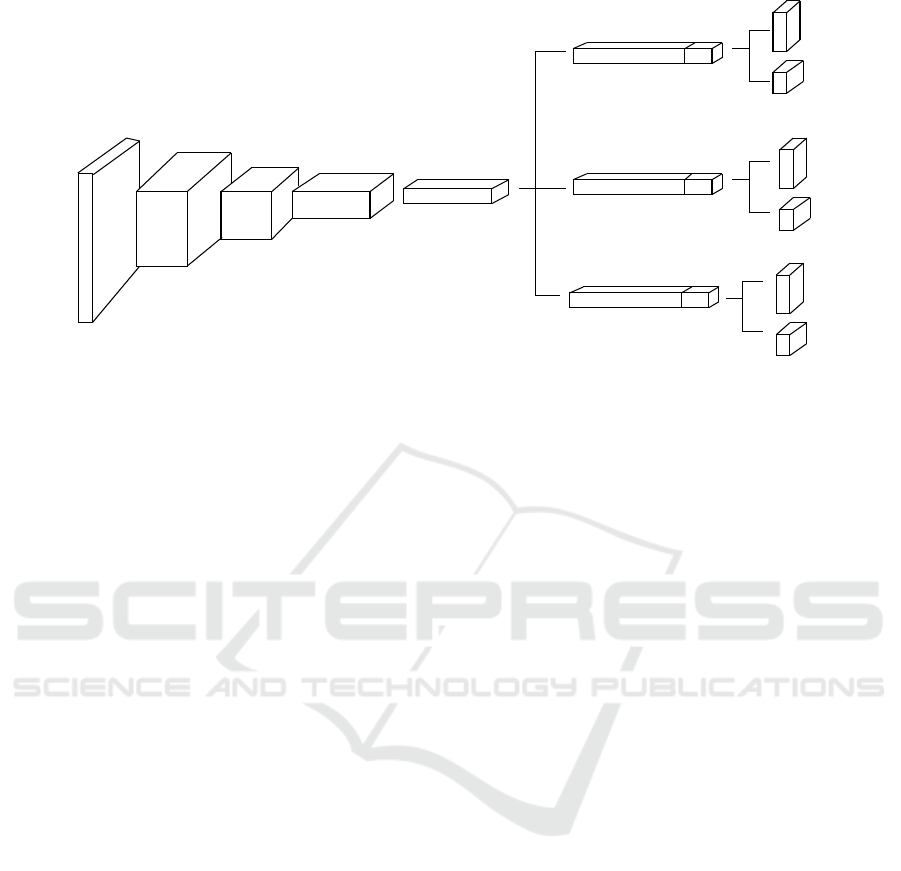
3.1.2 Proposed Multi-object Tracker
To track multiple objects using actions and confi-
dence scores, we propose different final layers for
the last fully connected layer and prediction layers.
The network (Yun et al., 2017) learns a generic rep-
resentation from many videos during training to pro-
duce certain actions given certain states, using shared
and domain specific layers for each new video us-
ing the multi-domain learning technique (Nam and
Han, 2016; Dredze and Crammer, 2008). We utilize
this trained network to do multiple object tracking by
treating each target to be a new video domain. To
learn multiple domains simultaneously, we utilize the
shared layers and initialize domain specific ones to
learn each of the targets. The f c5 layer is initialized
with pretrained weights whereas the action vectors
vary for each of the target. The f c6 and f c7 layers
are initialized with new weights.
Before starting a track, the final layers initialized
with new weights are adapted with p and n samples
obtained from the first bounding box on the target.
Once K different final layers are adapted for K differ-
ent objects, the binary classifications and predictions
of actions become domain specific. Online adapta-
tions are performed through the respective final lay-
ers during tracking. In case of tracking failure due to
low class confidence score for one of the actions taken
in MDP, redetection using sampling is performed and
we adapt to the features through their specific final
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
324
112*112*3
11*11*256
3*3*512
1*1*512
conv3
fc4
fc5
fc6_1
fc7_1
fc7_3
fc6_3
fc7_2
fc6_2
1*1*512 concat 1*1*110
1*1*512 concat 1*1*110
1*1*512 concat 1*1*110
conv2
conv1
51*51*96
action
class
action
class
action
class
Figure 2: Proposed multi-object tracking network modified through ADNet.
branches. Figure 2 shows the final layers and the
domain specific branches for action and class layers
for three targets being tracked. As the number of tar-
gets increases, the number of branches initialized for
tracking also increases. Once a track is said to have
ended, then the corresponding branch is reinitialized
with a new target when it appears.
We have modified a single object tracker for track-
ing multiple objects through online update. We shall
now discuss our solution for handling MOT chal-
lenges in the next section.
3.1.3 Challenges in MOT Scenario
In case of tracking failure with the proposed method,
the tracking process is continued from the redetected
patch. If the class confidence score of the redetected
patch were greater than 0.5, then we update the fully
connected layers for adapting to changes in appear-
ance of the patch that caused the tracking failure.
However this method fails for targets with occlusions,
frequent disappearance or reappearance and during
target interactions, a common scenario in the case
of multi-object tracking. This is because even if the
score is greater than the threshold of 0.5, it does not
indicate whether it is the entire object, partial object,
cluttered background or noisy image due to occlu-
sions.
However, performance of the tracker which de-
pends on the threshold for class confidence score is
kept as 0.5 for the proposed multi-object tracker. The
justificaton for the selection of threshold is as follows:
1. During the MDP process, if we keep a higher
threshold for class confidence score to continue
tracking with linear actions, it leads to more fail-
ures in the tracking process. This is because the
bounding box starts from the previous frame po-
sition and it requires a relaxation in the class con-
fidence score to take actions to reach the target in
the current frame.
2. Increasing the threshold for accepting the highest
class confidence score based sampled patch dur-
ing redetection is also not feasible. This is be-
cause fixing a high threshold for one of the targets
may not be suitable for the other target which has
a lower threshold for its full appearance. There is
a need to select some dynamic threshold based on
the target’s features which is elaborated in section
3.2.2.
Thus, we keep our threshold at 0.5 and perform
tracking. However, the tracker fails for multi-object
tracking as explained below -
• Tracker fails to track the target through target
drift, target loss, occlusions or confusion.
– Drift can occur due to fast motion, blur, illumi-
nation variation etc.
– Target loss occurs during disappearance of the
target from the frame or during severe and long
occlusions.
– Confusions occur due to targets with similar ap-
pearance or cluttered background.
• Updating the tracker with other features leads
to degradation of the model learnt online during
short-term update. This is because the tracker
only accounts for some of the recent past features
which have chances of getting corrupted without
the lack of target’s temporal information.
As mentioned, there is a need to select a threshold
for update based on the temporal and spatial features
of the target.
Segmentation of Moving Objects in Traffic Video Datasets
325
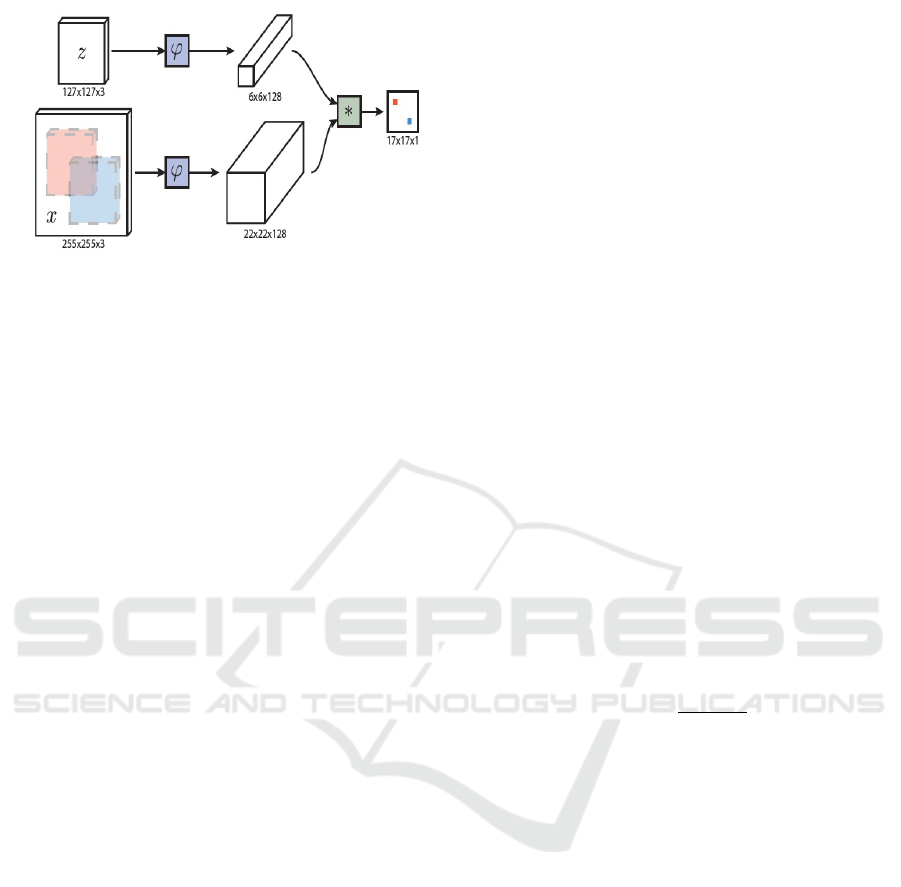
Figure 3: Fully convolutional siamese architecture. The net-
work diagram is taken from (Bertinetto et al., 2016).
3.2 Handling Model Update and Target
Drift
The issues arising from choice of class confidence
score as 0.5 are handled by using correlation maps.
We use correlation maps as an occlusion or noise at-
tention mechanism. We give a brief overview of the
network (Bertinetto et al., 2016) that is used for gen-
erating the correlation map for the ease of understand-
ing.
3.2.1 Using Fully Convolutional Siamese
Tracker
The Siamese architecture in Figure 3 is trained us-
ing similarity learning between a pair of positive and
negative image pairs. The ground truth labels are gen-
erated from a pair of images (positive pairs) obtained
from corresponding images of a video at most hun-
dred frames apart.
The spatial map is obtained by correlating two im-
ages, the exemplar patch x and search image patch z
using the below operation
f
ρ
(x, z) = φ(x) ∗ φ(z)+ b (3)
here ∗ is the cross correlation operator on the fea-
tures of the exemplar image x and the search image
z, by applying the function φ obtained by the trained
network . As the network is fully convolutional, there
is no risk of learning a bias on the centre of the search
image, even if training is with ground truth maps cen-
tered on the positive search image.
The output of this network is not a single score
between the target and the search image. Instead it is
a list of scores between each translated sub-window
in the search area with the target image, obtained
through a single forward pass.
3.2.2 Handling Occlusions through Generated
Correlation Maps
In case of tracking failure we use the generated cor-
relation maps to determine a dynamic threshold for
each of the targets. The maps are generated between
an exemplar patch (target template) representing the
full appearance of the target and a search area patch
centered on the redetected patch (as given in Equa-
tion 1) or the associated detection (explained in sec-
tion 3.2.3).
The Siamese model was trained to generate em-
beddings that produces a high score for positive pairs
and a low score for negative (dissimilar) pairs. We ob-
tain high peaks for similar targets and low peaks for
dissimilar targets.
The correlation map generated provides a spatial
support in the search area region centered on rede-
tected patch or associated detection. We also get a
temporal reference with respect to a full target ap-
pearance to check for occlusions or noise. During
tracking the map has different values for the same
target depending on the features in the search area.
The peak to side lobe ratio (PSR) as employed in the
MOSSE tracker (Bolme et al., 2010) can serve the
purpose of providing a measure for dynamic thresh-
old on the correlation map. To calculate PSR we have
taken 150 × 150 area around the peak value and per-
formed the following calculation
PSR =
R
max
− µ
σ
, (4)
where R
max
is the peak value of the response map.
µ and σ are defined as the mean and standard devia-
tion of the side lobe area.
The dynamic threshold (θ) for each target is set
by the PSR value obtained from the correlation map.
This is set by the initial exemplar image (first target
template) and the search area image centered on the
first target template or successfully associated detec-
tion that represents the full target appearance.
3.2.3 Long Term Tracking through Detections
To perform long term tracking and tracking of new
targets, we use detections from a pre-trained detector
(Redmon and Farhadi, 2018) to automate the process
of tracking with minimal human intervention.
For associating with the tracked objects, we centre
the search area on the detections and correlate it with
the target templates to get PSR values. After feature
association we also perform a proximity check using
intersection over union (IoU). The method for using
the PSR values based on the set dynamic thresholds
(θ) for each of the targets is as follows
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
326
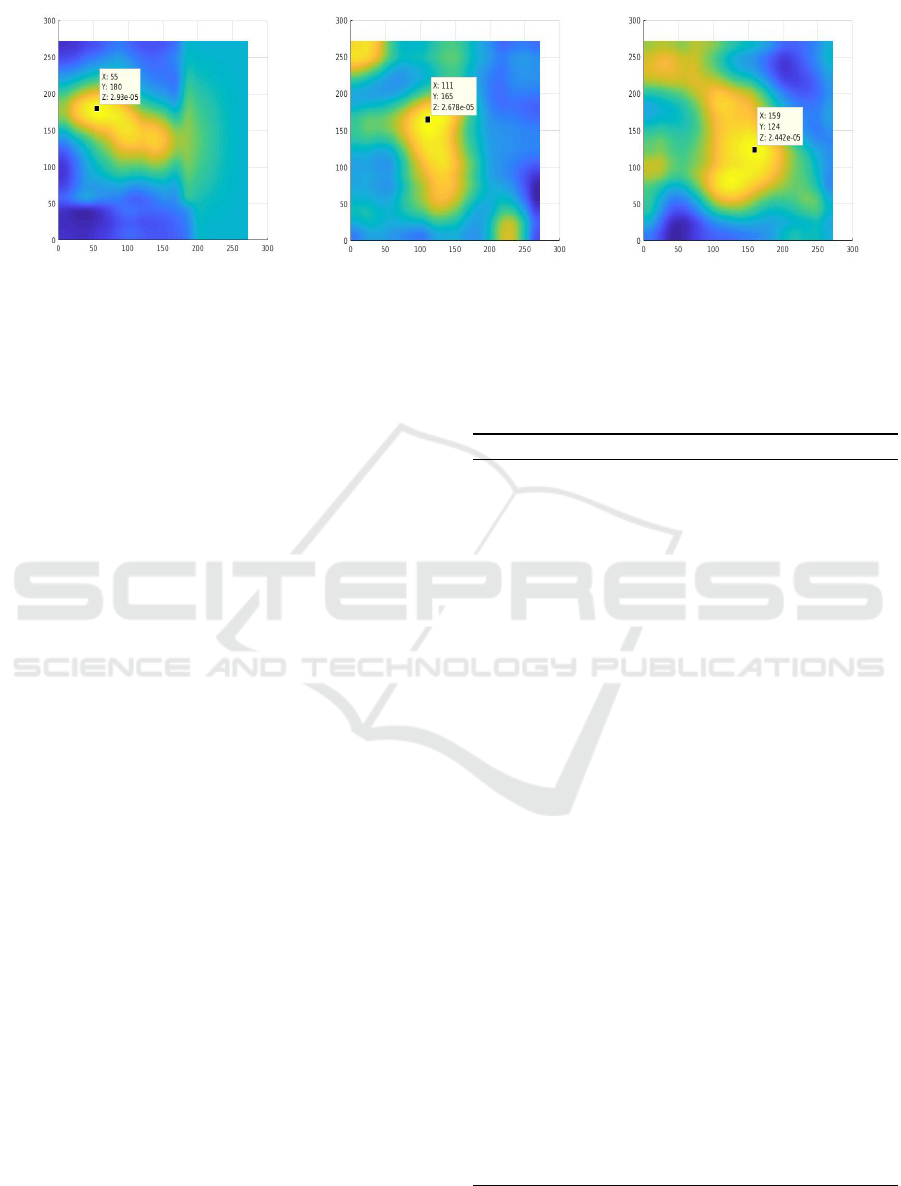
High PSR PSR within threshold θ Low PSR
Figure 4: Correlation maps for PSR calculation.
1. Associate with an active track (object tracked suc-
cessfully in previous frames and current frame)
(a) Detections are associated with the track when
PSR is less than or equal to θ. The track ID
(identity) is assigned to the detection and θ
value is reset using the detection features.
(b) If none of the detections are associated with
the track then the corresponding detection must
have missed the frame. We then associate the
track with the previous frame information and
assign it the same track ID.
2. Associate with an inactive track (object tracked
unsuccessfully in previous frames and current
frame). If detection is associated with an inactive
track, reassign θ with the detection template and
change its state to active track.
3. When number of detections are more than the
number of tracks, initialize new tracks for the
unassociated detections.
4 SUMMARY OF PROPOSED
MOT
The proposed tracker handles update through the
mulit-domain network and performs re-identification
on a search area maintained by the motion model.
Our proposed method is called MDT_RCM (Multi-
domain Tracking with Re-identification using Corre-
lation Maps). We provide a summary of the pro-
posed multi-object tracking method with the help of
a pseudo code.
The assignment of bounding box as redetected
patch for inactive state helps in re-identification as
mentioned in step 18 of the algorithm. This is because
inactive track’s search area is near the target in cases
where the motion model predicted linear actions suc-
cessfully, but failed in the last few steps of the MDP.
It is from this position given by the motion model that
redetection is performed.
Algorithm 1: MDT_RCM.
1: Get bounding boxes for first frame using detections.
2: Initialize the first K detections through K multi-domain
branches.
3: Set dynamic threshold values θ for each initial target.
4: for n=2 ; number of frames; n=n+1 do
5: Read image for frame n.
6: Track all the boxes parallelly through their corre-
sponding multi-domain branches.
7: Associate active and inactive tracks with detections.
Assign new tracks if necessary.
8: for all unsuccessful tracks do
9: Perform redetection by sampling as in eq 1.
10: Correlate with the target template and redetected
patch to get PSR value.
11: if PSR ≤ θ then
12: Active state: Consider it a successful track.
Collect positive and negative samples for on-
line update.
13: else
14: Inactive state :Maintain track in inactive state
till there is no re-identification or associated
detection.
15: if Number of inactive states > γ then
16: Terminate state : Remove this track. Here
γ is a threshold for number of frames for
which inactive state continues.
17: end if
18: Box position for tracking in the next frame is
set to the redetected patch position.
19: end if
20: end for
21: for all active tracks do
22: Finetune network with samples collected in the
recent past successfully tracked frames.
23: end for
24: end for
Segmentation of Moving Objects in Traffic Video Datasets
327
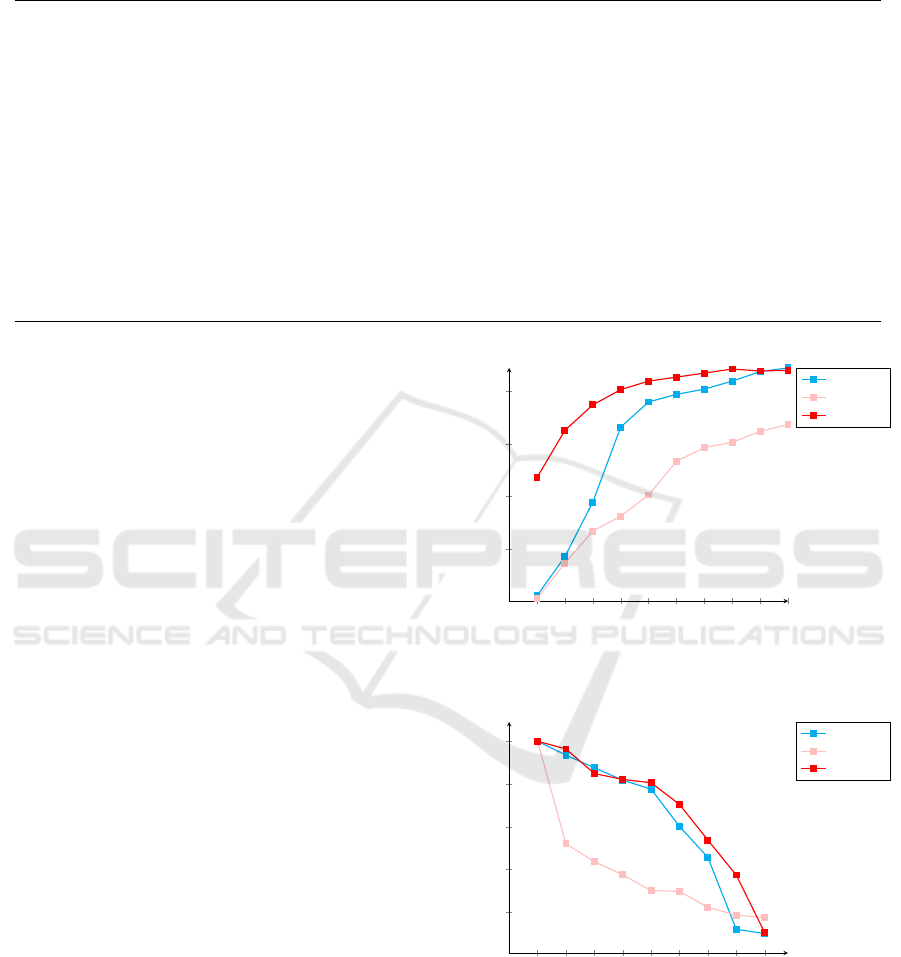
Table 1: Description of MOT16 dataset used for evaluation.
Name Type of dataset Camera Description
MOT16-02 Training set static Elevated night view of pedestrian street, interacting
objects, linear motion model, no long occlusions.
MOT16-04 Training set static People walking around a large square, full frontal
view from camera, include far targets with cluttered
background.
MOT16-13 Training set dynamic Camera mounted on a bus, frequent shaking and
rotation of camera, provides an elevated view of cars
and pedestrians.
MOT16-01 Test set static Side view of people walking around a large square,
include both static and moving targets with
interactions.
MOT16-06 Test set dynamic Street scene with moving platform, camera rotation
and complex interactions with severe occlusions.
This helps in re-identification through successful
tracking or redetection with acceptable PSR values in
the consequent frames.
4.1 Generation of Pixel Masks
Using PolyRNN++ (Acuna et al., 2018), we have
been able to obtain pixel masks for all the tracked
objects in traffic video datasets. We have chosen a
segmentation method that predicts pixel masks using
polygon vertices which helps in easy correction by the
human reviewer on an annotation tool.
5 RESULTS
First, we improve our model update for the single ob-
ject tracker on OTB-100 dataset (Wu et al., 2015).
Second, we test the proposed method for multiple ob-
ject tracking on MOT16 dataset (Milan et al., 2016).
Third, we use PolyRNN++ (Acuna et al., 2018) model
tested on the Cityscapes dataset (Cordts et al., 2016)
on traffic video recordings. The tracker and instance
segmentation network are then combined in a cus-
tom label tool to provide the annotator with a solution
for instance aware segmentation of multiple objects in
different traffic video datasets.
5.1 Dataset Description and Evaluation
Metrics
OTB-100 dataset consists of 100 video sequences
covering different challenges like illumination and
scale variations, fast motion, motion blur, occlusions,
deformations etc. MOT16 dataset has severe occlu-
sions, interacting targets and frequent disappearance
5
10
15
20
25
30
35
40
45
50
0.2
0.4
0.6
0.8
Location Threshold
Precision
Precision Plot
ADNet
Re3
Proposed
(a) Precision Plot on OTB-100 dataset
1 2 3 4 5 6
7
8 9
0.2
0.4
0.6
0.8
1
Overlap Ratio
Success
Success Plot
ADNet
Re3
Proposed
(b) Success Plot on OTB-100 dataset
Figure 5: Performance of single object tracking on
OTB-100 dataset. Here the proposed method refers to
MDT_RCM.
and appearance of objects. Table 1 provides a sum-
mary of the nature of objects in MOT16 dataset (Mi-
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
328

Figure 6: Multi-object tracking results on OTB-100 (top row) and MOT16 (bottom row) datasets.
lan et al., 2016) we use for evaluating our method.
To evaluate the performance of the tracker we
have used the precision and success plots of OPE
(One pass evaluation) (Wu et al., 2013).
1. Precision Plot (Wu et al., 2013): This plot cal-
culates the percentage of frames within a location
error threshold. The location value is given by
the Euclidean distance between the centers of the
tracked targets and the manually labeled ground
truths.
2. Success Plot (Wu et al., 2013): For this plot,
we calculate the IoU of the tracked box with the
ground truth box and check for the percentage
of frames whose overlap is greater than a certain
threshold.
5.2 Multi-object Tracking
Improving the model update and target drift improves
the single object tracker as compared to the original
ADNet and Re3 trackers. From the graphs in Figure
5, we see that the precision values at location error
threshold of 20 pixels are 74.2, 40.5 and 80.7 for AD-
Net, Re3 (Gordon et al., 2018) and the improved AD-
Net tracker respectively. And the success rate at an
overlap ratio of 0.5 are 78.6, 30.8 and 80.6 respec-
tively.
The results on evaluating for multi-object track-
ing using MDT_RCM is shown in Figure 6. This is
shown for two objects from the OTB-100 dataset and
five objects from the MOT16 dataset.
Figure 7 shows re-identification of tracks where
the left column refers to inactive tracks when PSR
is below threshold and the right column shows re-
identification when PSR is above threshold. Figure 7
(a) show the process of tracking through moving ob-
jects, where the model is not updated with features of
the occluding person. Figure 7 (b) demonstrate suc-
cessful tracking of a stationary and moving object.
Finally, Figure 7 (c) indicate tracking in the case of
moving cameras along with severe occlusion.
(a)
(b)
(c)
Figure 7: Re-identification of tracks in MOT scenario.
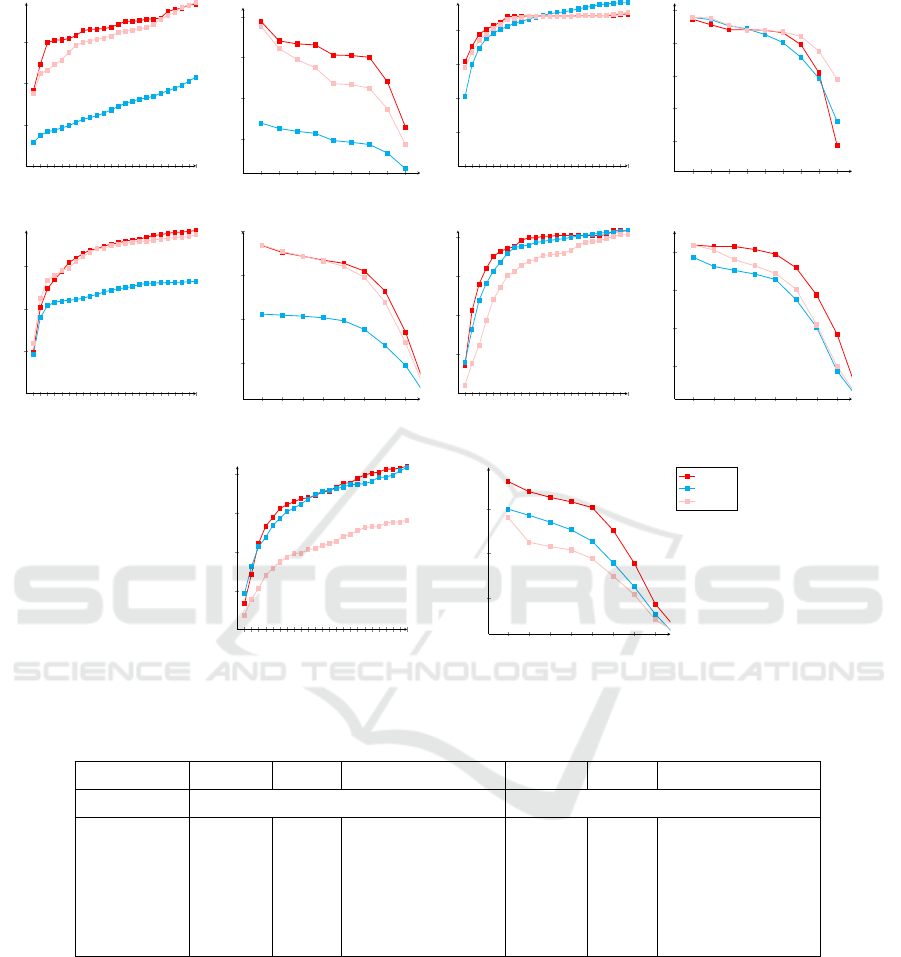
Figure 8 shows the performance of MDT_RCM
on MOT16 dataset for both precision and success plot,
obtained by averaging over all objects for all frames
of the video. The values for precision and success ra-
tios are shown in Table 2. The results vary in improve-
ments on different videos on an average over vary-
ing number of objects and scenarios. We see that the
proposed method performs well in general on success
rates due to better motion model. As it is capable of
re-identification, MDT_RCM shows better improve-
ment on the precision rates over other methods.
The MDT_RCM has performed well in MOT sce-
narios with promising results. The timing perfor-
mance of the proposed method has been improved
using parallel computing from 2.9 s per object (AD-
Segmentation of Moving Objects in Traffic Video Datasets
329
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
0.2
0.4
0.6
Location Threshold
Precision
Precision - MOT16-02
1
2 3 4 5 6
7
8 9
0.2
0.4
0.6
0.8
Overlap Ratio
Success
Success - MOT16-02
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
0.2
0.4
0.6
0.8
Location Threshold
Precision
Precision - MOT16-04
1 2 3 4 5 6
7
8 9
0.2
0.4
0.6
0.8
1
Overlap Ratio
Success
Success - MOT16-04
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
0.2
0.4
0.6
Location Threshold
Precision
Precision - MOT16-13
1 2 3 4 5 6
7
8
0.2
0.4
0.6
0.8
Overlap Ratio
Success
Success - MOT16-13
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
0.2
0.4
0.6
0.8
Location Threshold
Precision
Precision - MOT16-01
1 2 3 4 5 6
7
8
0.2
0.4
0.6
0.8
Overlap Ratio
Success
Success - MOT16-01
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
0.2
0.4
0.6
0.8
Location Threshold
Precision
Precision - MOT16-06
1 2 3 4 5 6
7
8
0.2
0.4
0.6
Overlap Ratio
Success
Success - MOT16-06
Proposed
Re3
ADNet
Figure 8: Precision and Success Plots for multi-object tracking on MOT16 datasets. In these plots the proposed method refers
to MDT_RCM.
Table 2: Results on MOT16 training and test sets.
VideoSet ADNet Re3 Proposed method ADNet Re3 Proposed method
Precision Success
MOT16-02 61.51 24.42 66.38 47.10 19.24 61.17
MOT16-04 87.69 86.28 88.04 87.69 85.17 87.72
MOT16-13 68.14 46.69 68.23 64.10 39.28 65.45
MOT16-01 67.40 75.9 79.6 69 65.77 79.2
MOT16-06 41.18 67.20 67.86 37.75 45.58 60.71
Net) to 0.6 s per object (MDT_RCM). Compared to
the real-time Re3 tracker (0.3 s per object), it is a
slower offline tracker which assigns the same track
ID to all moving objects and has the advantage of re-
identification.
5.3 Instance Aware Segmentation
We combine the multi-object tracking and segmenta-
tion method through a custom label tool, where the
output of the tracker is fed to the segmentation net-
work using a communication protocol (Varda, 2008)
and pixel masks are obtained simultaneously for all
the objects in the frame.
Figure 9 shows the masks of two objects using our
multi-object tracker and segmentation algorithm dis-
played on a custom label tool. The annotator can ad-
just the box or mask when necessary on the annotation
tool while reviewing the ground truth generated.
The annotator can choose to update the model of
MDT_RCM for a slight correction in the bounding
box and improve the accuracy of a particular target
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
330

(a) Bounding box and polygon mask (b) Polygon vertices outlining the target
Figure 9: Displaying the tracked boxes and pixel masks on annotation tool.
for future frames. In this case, the segmentation algo-
rithm is also connected to the tool through the proto-
col to display the new pixel masks.
6 CONCLUSIONS
We have automated the process of segmenting multi-
ple moving objects with instance-aware labels using
deep learning techniques. To achieve this we pro-
posed a two-fold solution, firstly to obtain tracks for
multiple objects and secondly to use a segmentation
algorithm on the boxes obtained.
We developed a scalable multi-domain network
for tracking multiple objects in traffic video datasets
called MDT_RCM (Multi-domain Tracking with Re-
identification using Correlation Maps). It performs
well in tracking multiple objects along with success-
ful re-identification in MOT scenarios with high pre-
cision and success rates.
The initial layers of the CNN in ADNet can be
improved upon for multi-object tracking by using Re-
gion Proposal Networks (RPN) for foreground and
background classification. Anchor boxes for simulta-
neously predicting the boxes for all objects in the im-
age could provide an advantage in terms of speed over
parallel computing. The Siamese architecture could
be used a part of the RPN network for tracking (Li
et al., 2018) without any online update. An LSTM can
also be used for predicting a series of actions instead
of using a CNN network based on Markov Decision
Process.
From the output of the tracker, we obtained iden-
tity aware pixel masks using PolyRNN++ as the seg-
menation algorithm. Both the boxes and segmenta-
tion masks generated can be visualized on an anno-
tation tool to help in completing the labeling for an
entire recording with minimal human effort and inter-
active corrections.
This solution can be used in diverse applications
involving video data processing. Motion detection,
intrusion detection, suspicious behaviour analysis, se-
curity access point monitoring, vehicle monitoring,
parking management and people counting are a few
examples of where the core solution can be applied.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Süsstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE transac-
tions on pattern analysis and machine intelligence,
34(11):2274–2282.
Acuna, D., Ling, H., Kar, A., and Fidler, S. (2018). Ef-
ficient interactive annotation of segmentation datasets
with polygon-rnn++. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 859–868.
Andriluka, M., Roth, S., and Schiele, B. (2008).
People-tracking-by-detection and people-detection-
by-tracking. In 2008 IEEE Conference on computer
vision and pattern recognition, pages 1–8. IEEE.
Babenko, B., Yang, M.-H., and Belongie, S. (2009). Vi-
sual tracking with online multiple instance learning.
In 2009 IEEE Conference on Computer Vision and
Pattern Recognition, pages 983–990. IEEE.
Bertinetto, L., Valmadre, J., Henriques, J. F., Vedaldi, A.,
and Torr, P. H. (2016). Fully-convolutional siamese
networks for object tracking. In European conference
on computer vision, pages 850–865. Springer.
Beucher, S. and Meyer, F. (1993). The morphological ap-
proach to segmentation: the watershed transforma-
tion. Mathematical morphology in image processing,
34:433–481.
Bolme, D. S., Beveridge, J. R., Draper, B. A., and Lui, Y. M.
(2010). Visual object tracking using adaptive corre-
lation filters. In 2010 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
pages 2544–2550. IEEE.
Chu, Q., Ouyang, W., Li, H., Wang, X., Liu, B., and Yu, N.
(2017). Online multi-object tracking using cnn-based
single object tracker with spatial-temporal attention
Segmentation of Moving Objects in Traffic Video Datasets
331

mechanism. In Proceedings of the IEEE International
Conference on Computer Vision, pages 4836–4845.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3213–3223.
Dredze, M. and Crammer, K. (2008). Online methods for
multi-domain learning and adaptation. In Proceed-
ings of the Conference on Empirical Methods in Nat-
ural Language Processing, pages 689–697. Associa-
tion for Computational Linguistics.
Gordon, D., Farhadi, A., and Fox, D. (2018). Re3: Re al-
time recurrent regression networks for visual tracking
of generic objects. IEEE Robotics and Automation
Letters, 3(2):788–795.
Grabner, H., Grabner, M., and Bischof, H. (2006). Real-
time tracking via on-line boosting. In Bmvc, volume 1,
page 6.
Grabner, H., Leistner, C., and Bischof, H. (2008). Semi-
supervised on-line boosting for robust tracking. In
European conference on computer vision, pages 234–
247. Springer.
Hare, S., Golodetz, S., Saffari, A., Vineet, V., Cheng, M.-
M., Hicks, S. L., and Torr, P. H. (2015). Struck:
Structured output tracking with kernels. IEEE trans-
actions on pattern analysis and machine intelligence,
38(10):2096–2109.
Held, D., Thrun, S., and Savarese, S. (2016). Learning to
track at 100 fps with deep regression networks. In Eu-
ropean Conference on Computer Vision, pages 749–
765. Springer.
Jepson, A. D., Fleet, D. J., and El-Maraghi, T. F. (2003).
Robust online appearance models for visual tracking.
IEEE transactions on pattern analysis and machine
intelligence, 25(10):1296–1311.
Jiang, H., Fels, S., and Little, J. J. (2007). A linear pro-
gramming approach for multiple object tracking. In
2007 IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 1–8. IEEE.
Kalal, Z., Matas, J., and Mikolajczyk, K. (2010). Pn
learning: Bootstrapping binary classifiers by struc-
tural constraints. In 2010 IEEE Computer Society
Conference on Computer Vision and Pattern Recog-
nition, pages 49–56. IEEE.
Li, B., Yan, J., Wu, W., Zhu, Z., and Hu, X. (2018). High
performance visual tracking with siamese region pro-
posal network. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition,
pages 8971–8980.
Maninis, K.-K., Caelles, S., Pont-Tuset, J., and Van Gool,
L. (2018). Deep extreme cut: From extreme points to
object segmentation. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 616–625.
Milan, A., Leal-Taixé, L., Reid, I., Roth, S., and Schindler,
K. (2016). Mot16: A benchmark for multi-object
tracking. arXiv preprint arXiv:1603.00831.
Milan, A., Roth, S., and Schindler, K. (2013). Continuous
energy minimization for multitarget tracking. IEEE
transactions on pattern analysis and machine intelli-
gence, 36(1):58–72.
Nam, H. and Han, B. (2016). Learning multi-domain con-
volutional neural networks for visual tracking. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 4293–4302.
Pinheiro, P. O., Collobert, R., and Dollár, P. (2015). Learn-
ing to segment object candidates. In Advances in
Neural Information Processing Systems, pages 1990–
1998.
Pirsiavash, H., Ramanan, D., and Fowlkes, C. C. (2011).
Globally-optimal greedy algorithms for tracking a
variable number of objects. In CVPR 2011, pages
1201–1208. IEEE.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ross, D. A., Lim, J., Lin, R.-S., and Yang, M.-H. (2008).
Incremental learning for robust visual tracking. Inter-
national journal of computer vision, 77(1-3):125–141.
Tao, R., Gavves, E., and Smeulders, A. W. (2016). Siamese
instance search for tracking. In Proceedings of the
IEEE conference on computer vision and pattern
recognition, pages 1420–1429.
Varda, K. (2008). Protocol buffers: Google’s data inter-
change format. Google Open Source Blog, Available
at least as early as Jul, 72.
Wu, Y., Lim, J., and Yang, M.-H. (2013). Online object
tracking: A benchmark. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 2411–2418.
Wu, Y., Lim, J., and Yang, M.-H. (2015). Object tracking
benchmark. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 37(9):1834–1848.
Xu, N., Price, B., Cohen, S., Yang, J., and Huang, T. (2017).
Deep grabcut for object selection. arXiv preprint
arXiv:1707.00243.
Yun, S., Choi, J., Yoo, Y., Yun, K., and Young Choi, J.
(2017). Action-decision networks for visual tracking
with deep reinforcement learning. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2711–2720.
Zhuang, B., Lin, G., Shen, C., and Reid, I. (2016). Fast
training of triplet-based deep binary embedding net-
works. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
5955–5964.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
332
