
Design and Experimental Study of a Pneumatic Bionic Stingray
Undulatory Soft Robot
Songzi Guo, Jinhua Zhang, Yuhan Yang, Haiyan Cheng and Jun Hong
Key Laboratory of Education, Ministry for Modern Design and Rotor-Bearing System, Xi’an Jiaotong University,
Xi’an 710049, China
Keywords: Bio-Mimic Design, Flexible Actuation.
Abstract: Underwater organisms have always been providing inspiration for the design and development of novel
underwater propulsion and bionic robots. At present, stingray has been taken as a bionic object due to its
stable motion and robust mobility. In this study, a stingray propelled by flexible pectoral fins was taken as a
bionic object. Based on this, a new idea for the design of high-performance bionic underwater propulsor was
proposed. An analysis was conducted regarding the design, fabrication and experiments of the bionic stingray
wave propulsion soft robot based on pneumatic drive. As revealed by the experiments of propulsion
performance, the influencing factors for average propulsion include varying frequencies, fin stiffness and the
gaps between substrate and the fins. This is expected to provide guidance on our design of a stingray robot in
respect of efficient mobility.
1 INTRODUCTION
With the deepening of research on fish, researchers
have found out that fish is adaptive to different living
environments. By means of distinctive swimming
gaits, fish is capable of high-speed cruise and agile
maneuverability (Webb et al., 1994). Among various
fishes, the stingray shown in Figure.1 is considered to
be an outstanding swimmer especially when they
swim in close proximity of the substrate (B. Liu and
Z. Guo, 2018). Besides, it shows such obvious
advantages high propulsion efficiency, excellent
steering maneuverability and swimming stability,
which makes it attract increasing attention from many
researchers. According to the observation of a
pectoral during swimming, there are multiple
propulsive waves created by their pectoral fin, which
are termed undulatory-swimmer. At present, there
have been plenty of studies conducted on the motion
mechanism of rays (Wu et al., 1961) as well as the
swimming performance (Rosenberger et al., 1999 and
2001). These studies have provided us with a
significant inspiration in the design of bionic robots
(e.g. undulatory soft robotic (Urai, R. Sawada and N.
Hiasa, 2015; Jusufi et al., 2017; S. N. Toda Y et al.,
2006; Moored et al., 2011) and oscillatory soft robotic
(Moored, K. W. and Dewey, P. A, 2011; Chen et al.,
2012; Chew et al., 2015).
Based on the morphological properties of rays
with independent actuators, a mimic soft batoid robot
was developed in the previous work of Urai and
Sawada (Urai, R. Sawada and N. Hiasa, 2015). Such
specialized flexible structure makes the mimic soft
batoid robot adaptive to a wide range of different
applications and complex environmental conditions.
Besides, it was indicated in their work that the fin
stiffness causes swimming performance to vary
significantly. Accordingly, an appropriate design of
the fin stiffness is required to enhance swimming
performance. Using ionic polymer–metal composite
(IPMC), Chen et al (Chen et al., 2012) developed a
manta ray robot to fabricate artificial muscles for the
simulation of swimming behavior exhibited by a
manta ray. According to their experimental results,
this robot is capable to swim at 0.74 cm/s with a
consumption of less than 2.5 W.
In this study, a finalized prototype of a bio-
inspired stingray robot was developed through the
combination of biomimetic functions and
morphological properties. Furthermore, in order to
enhance its swimming performance, the fin-to-wing
extension stiffness for fins based on a jamming
method was designed. However, this jamming
method shows some difference compared with real
rays, it is still a more effective approach to adjusting
the stiffness of a pectoral fin than to replacing fin rays
on it. Then, an experiment platform was constructed
Guo, S., Zhang, J., Yang, Y., Cheng, H. and Hong, J.
Design and Experimental Study of a Pneumatic Bionic Stingray Undulatory Soft Robot.
DOI: 10.5220/0008939703630368
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 363-368
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
363
to study the propulsion performance of the prototype.
As revealed by the experimental results of propulsion
performance, there is a significant improvement of
average propulsion with the rising frequencies under
1Hz. Besides, it is determined by fin stiffness and
shows an increase of negative pressure in jamming
chamber. Then, an investigation was conducted into
the impact of the bionic stingray robot on the
propulsion performance when swimming took place
at different heights from a substrate. The
experimental results demonstrated that swimming
performance can be enhanced by swimming close to
the substrate at proper heights. The contributions of
this study are threefold. Firstly, the novel pneumatic
stingray robot was developed. Secondly, a jamming
method was proposed for active variable stiffness to
enhance propulsion force. Thirdly and lastly, the
ground effect of the stingray robot on propulsion
performance was verified.
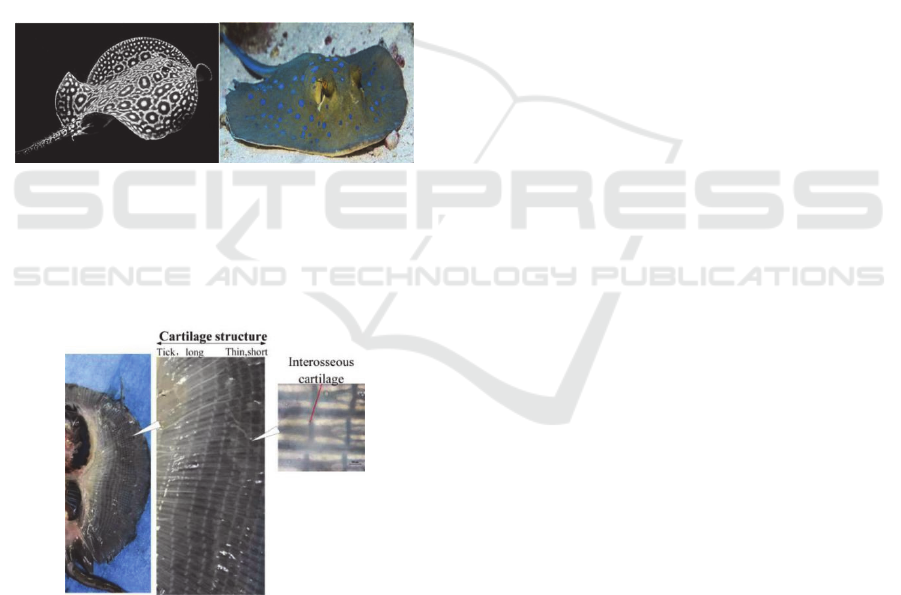
Figure 1: Biological stingrays.
2 FROM BIOLOGICAL FISH TO
ROBOTIC FISH
Figure 2: The skeletal structure of a stingray.
A rajiform swimmer, bluespotted stingray, is taken as
an biomimetic subject, which is because its
swimming model embodies a fine balance reached
between speed and maneuverability, thus facilitating
the design of a next-generation underwater vehicle.
On this basis, a scheme was proposed to develop a
stingray robot by combining both morphological and
kinematic properties of the stingray. In order to
illustrate their excellent swimming performance, a
series of vivisection experiments were conducted on
a bluespotted stingray. The musculoskeletal structure
of the subject is shown in Figure. 2, which reveals that
the radial cartilage skeleton is embedded in a circular
pectoral fin, which is covered with planate muscles.
This sort of radially musculoskeletal structure is
considered favorable for the agile and flexible motion
of the pectoral fin by the successive stimulation of
planate muscles. Moreover, an observation was made
of the interosseous cartilage structure along the
chordwise direction, and such a conjunction structure
between two radial cartilages increases the chordwise
stiffness in the pectoral fin required for the actual
transmission of traveling wave in the chordwise
direction (Fiazza et al., 2010). On the other hand, the
compliant tissue, particularly on the pectoral fin,
allows for bending to a greater extent, which prompts
the shift of our focus to the enhancement of material
properties that make the stingray robot closer to the
object of simulation, for example, flexibility and
malleability.
Based on the biological observations of
anatomical structure, it is deemed necessary to
simulate the existence of a radially musculoskeletal
structure and the compliance of the pectoral fin,
which is achieved through the symmetrical and radial
deployment of twelve soft pneumatic actuators on the
pectoral fin. In addition, it is essential to choose an
appropriate material to approach the simulation
object. Therefore, a variety of hyperelastic silicone
rubber (ELASTOSIL, M4601) was adopted to
fabricate the bionic actuators due to its excellent
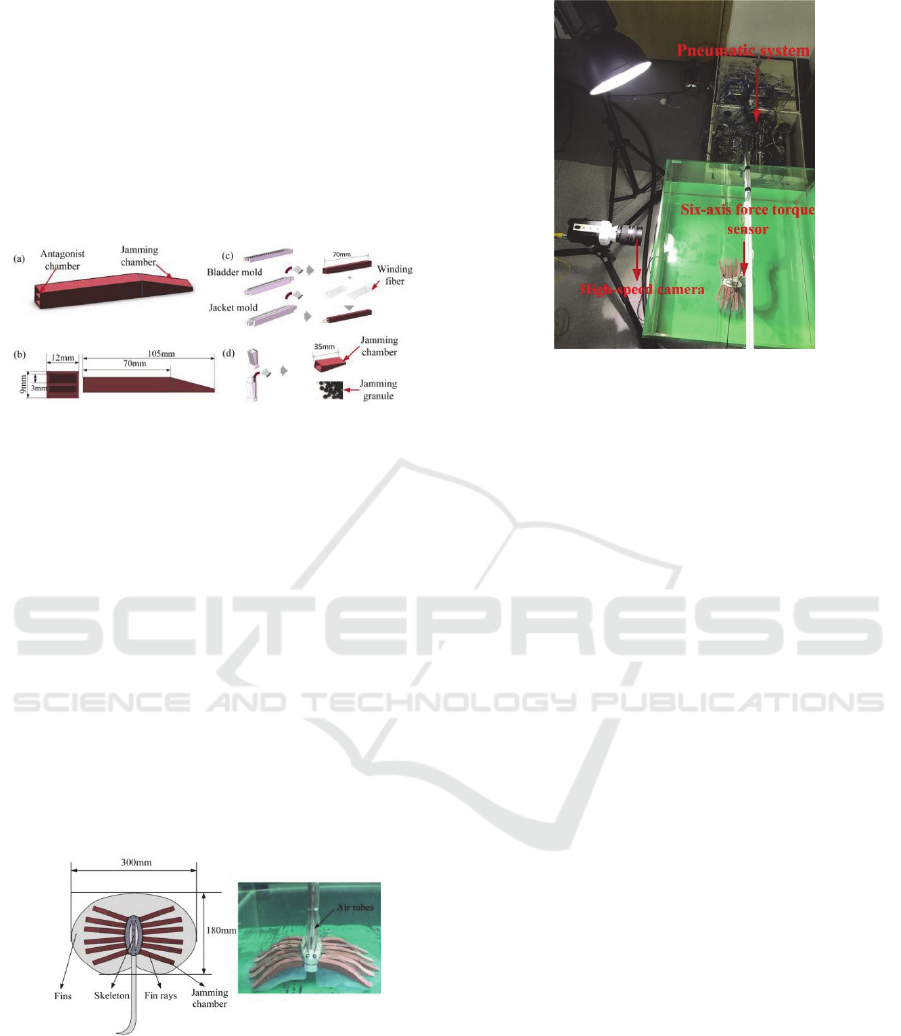
flexibility and malleability. The actuator is designed
to combine an actuating chamber with two antagonist
chambers and a jamming chamber as shown in
Figure.3.a, in which the pressures are controlled
separately. Constrained by winding fiber, this
actuating chamber is covered with an external jacket
made of the same material. A jamming chamber
capable to adjust stiffness distribution on the pectoral
fin is attached at the tip of an actuating chamber by
wacker E41 as adhesive. As packed with plastic
granules 2mm in diameter (Figure.3.d), While being
depressurized, the cavity makes uncompacted granule
compressed tightly and presents different stiffness.
This method is effective in enhancing swimming
performance, which will be verified in the following
experiments. The total length of the actuator is
105mm, while the actuating part and jamming part are
70mm and 35mm in length, respectively, as shown in
Figure.3.b. The fabrication process of the actuating
chamber is illustrated in Figure.3 c. With the M4601
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
364
polymer poured into a 3D printed bladder mold and
cured, the preliminary bladder is achieved after the
first-time demolding. Then, it is winded with fiber to
withstand the deformation caused in radial direction,
as a result of which curvature can be generated when
the pressure is increased in one chamber. Afterwards,
the bladder is covered with jacket layer. After the
second-time demolding and attachment of the
jamming chamber at the tip of the fin ray, the
fabrication of the entire actuator is completed.
Figure 3: The design of the actuating fin ray with two
degrees of freedom, (a) an isometric view, (b) a side view,
consisting of actuating chamber and jamming chamber. (c)
The fabrication process of the actuating fin rays involves
bladder molding and jacket molding. (d) The fabrication
process of the the jamming chamber. When depressurized,
it makes uncompacted granules compressed tightly and
exhibits varying stiffness.
When all of the twelve flexible fin rays are
obtained, they are adhered to a disc-like transparent
silicon rubber plate with a 0.5mm thickness.
3 EXPERIMENTS AND RESULTS
3.1 The Establishment of the
Experimental Platform
Figure 4: The developed prototype of the ray-like soft robot.
The bio-inspired stingray robot and its specifications
are shown in Figure.4. The pectoral fin consists of
dozen of the bionic fin rays deployed radially around
the flexible disc-like plate. Besides, it is fixed on a
skeleton made out of photosensitive resin. In order to
provide and regulate the driving pressure, an air tube
(SMC, 2mm) is supposed to be connected to each of
Figure 5: An experiment system to test the swimming
performance.
the antagonist chambers actuated separately by a
pneumatic system, as shown in Figure.5. The
pneumatic system primarily consists of an air
compressor module capable of supplying compressed
air to the actuators and a digital output module
achieved by a PLC module (OMRON, CJ1W-
DA08V, CJ1W-OC21), which is capable to regulate
the states of solenoid valves and proportional valves,
respectively. The pneumatic system is placed above
the water. Air tubes are applied to connect the
pneumatic system to the bionic stingray robot.
Considering that one of the most representative
properties of bio-inspired robots, flexibility, can be
affected when they are combined with rigid electronic
components, a simplified prototype with open loop
control was developed without any type of electrical
components fitted on the bionic stingray robot. This
open loop control is capable of regulating the
undulatory attitudes, frequencies and the stiffness of
the fin rays. More specifically, it can regulate the
compressed air generated by the air compressor
module and make adjustment to the pressure in the
two antagonist chambers when the solenoid valves
and proportional valves are successively exerted
sinusoidal signals generated by the PLC module to
control its states. Then, the bionic stingray robot can
perform distinct undulatory gaits. The deformation
caused to the pectoral fins of the bionic stingray robot
is illustrated in Figure. 6.a, which shows that it is
driven by a pressure regulated by the PLC module.
The maximum pressure in the actuating chambers is
0.08Mpa, and the actuating frequency is 0.5Hz. As
shown in Figure. 6.b, the bionic stingray robot is
snapped while performing an undulatory gait.
Design and Experimental Study of a Pneumatic Bionic Stingray Undulatory Soft Robot
365
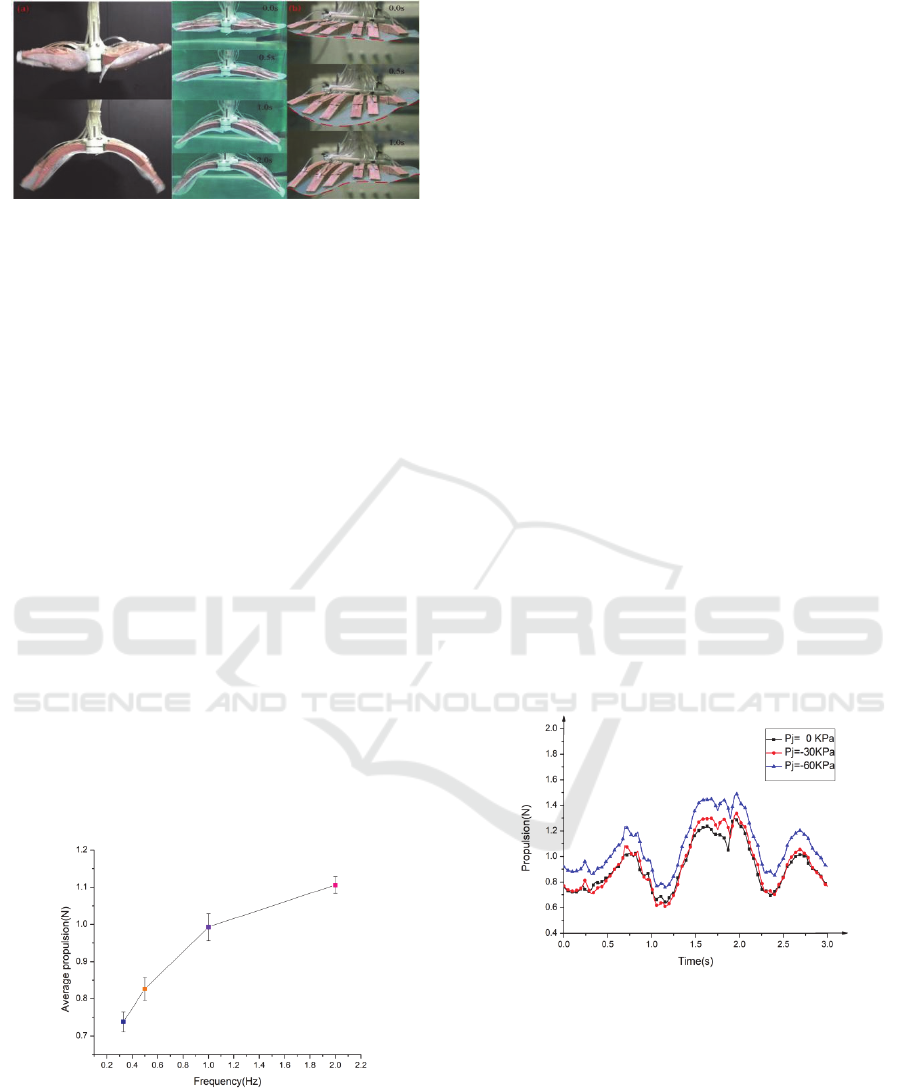
Figure 6: The deformation on the pectoral fins of the
stingray robot.
3.2 Effects of Frequencies on
Propulsion Performance
In order to explore the relationship between the
frequency and propulsion, the stingray robot was
placed in a water tank which is 1.5m long, 1m wide
and 0.5m deep, the locomotion of which was
restricted to one degree of freedom for a forward
translation with a steel bar. The swimming behavior
on propulsion was observed by periodically driving
the fin rays in phase at varying frequencies. The
average propulsion was obtained by measuring the
propulsion within one period. In the experiments, a 6-
axis force torque sensor (ATI-Nano17) was employed
to record the forces generated. More specifically, the
undulatory amplitude was significantly down-
regulated to actuate frequencies over 2.5Hz due to the
limitation on the response time of the pneumatic
system. Thus, the maximum driving frequency was
restricted to under 2Hz. It was found out that a decent
undulatory amplitude appeared on the fin under the
driving pressure P =0.05Mpa. Therefore, the
experiments were conducted under the actuating
pressure of 0.05MPa.
Figure 7: The propulsion performance for four different
frequencies f= 0.33, 0.50, 1.00, 2.00 Hz.
The experimental results indicate the relationship
between average propulsion and the actuating
frequencies, as shown in Figure.7. The average
propulsion is affected by the changes in frequency.
On the one thing, the average propulsion is improved
with the rise of frequency and one maximum average
propulsion can reach 1.1N. In the meantime, the
driving frequency and pressure are 2.00Hz and
0.05MPa, respectively. When the actuating frequency
exceeds 1Hz, nevertheless, this upward trend begins
to slow down. On the other hand, a higher level of
frequency requires the consumption of more energy.
Thus, it is necessary for both propulsion and energy
consumption to be considered carefully for meeting
different requirements.
3.3 Effects of Fin Stiffness on
Propulsion Performance
Given that fishes can create a greater propulsion force
to change the stiffness of their fins and have
interaction with the surrounding fluid in a flexible
way (Fiazza et al., 2010), our stingray robot with a
jamming chamber at the tip of the fin ray is optimized
to enhance the propulsion performance while
allowing it to get adaptive to various hydrodynamic
circumstances. The experiments were performed to
better understand how the propulsion force varies for
the fins to achieve different stiffness after being
depressurized to different pressures. The propulsion
forces were measured during the one period T=3s
with jamming chamber for three different pressures
(Pj= 0kPa, -30kPa, -60kPa), and the twelve fin rays
were driven under pressure P =0.05MPa.
Figure 8: Propulsion of the stingray robot with three
different fin stiffness regulated by negative pressure in the
jamming chamber (Pj stands for the negative pressure in
jamming chamber).
The difference of propulsion forces at varying
negative pressure is shown in Figure.8, in which the
propulsion forces of three different negative pressures
are plotted. According to the experimental results, the
propulsion force is maximized when the jamming
chambers are depressurized to -60kPa. By contrast,
the propulsion force is minimized under the pressure
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
366
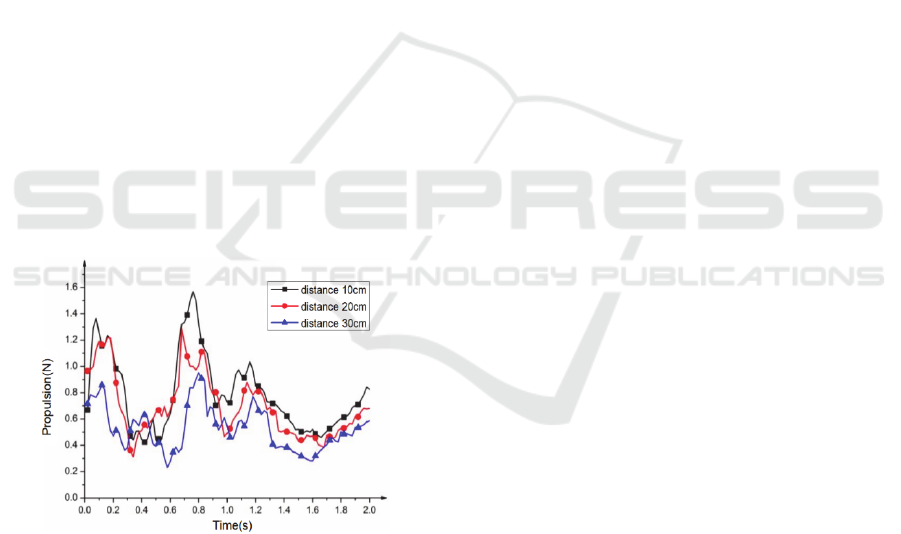
P=0kPa. Additionally, each side of the fin rays is
divided into three pairs driven by the actuating signal
in different phases. Since the motion of fins is based
on three pairs of fin rays, three different propulsion
peaks can be observed in Figure.9 and the largest
propulsion force is indicated by the middle peak,
which suggests that the middle pair plays a crucial
role in this stipulated pattern of motion. Moreover, it
is worth noting that the maximum undulatory
amplitude of the stingray robot is reduced as negative
pressure rises (0kPa through -60kPa) in jamming
chamber. In comparison, the driving pressure and
frequency remain unchanged. Therefore, the stiffness
of the fins is required to meet the various
requirements.
3.4 The Ground Effect on Swimming
Performance
It is noteworthy that when fishes swim near the
substrate, its generation of propulsion is subject to a
significant impact from the distance between the fins
and the substrate (B. Liu and Z. Guo, 2018). In the
experiments conducted in this study, the propulsion
performance of the fins was investigated with three
different gaps (d=10cm, 20cm, 30cm) between the
fins and ground. Moreover, each of the experiment
was conducted under the same driving pressure
P=0.05MPa and frequency f=0.5Hz.
Figure 9: Propulsion of the stingray robot with different
distances between the substrate and the bionic pectoral fin.
The result is shown in Figure.9, which reveals that
the maximum value can reach 1.6 N when the gap is
10cm. In this case, its trajectory of propulsion force
shows a slight difference with gap d= 20cm and gap
d=30cm, the instantaneous maximum of which can
reach 1.28 N and 0.92 N, respectively. In addition,
near-ground swimming can generate three different
propulsion peaks in one period, which is associated
with the motion of fins. The propulsion peaks will be
observed when the fin rays close to the ground,
suggesting that the stingray robot can achieve a
superior propulsion performance when it swims at a
proper height (10cm), which is conducive to
enhancing the efficiency of underwater propulsor.
4 CONCLUSION
In this study, a prototype of stingray robot based on
the combination of biological functions and
morphological properties was proposed to make the
stingray robot capable of achieving ray-like flexible
locomotion through a pneumatic system. The
biological functions including rapid responding and
agile motion are estimated by propulsion forces and
the average propulsion can reach 1.1N at maximum.
In comparison, the driving frequency and pressure are
2.00Hz and 0.05MPa, respectively. Moreover, the
propulsion performance of the stingray robot can be
enhanced by adjusting the stiffness of their fins and
having interaction with the surrounding fluid in a
flexible way as achieved by jamming method and
flexible biomimetic material. The inherent
advantages of the pneumatic actuator, especially in
weight and deformation, provide a new idea for the
design of underwater vehicles fit for complex
working environments. Moreover, the constant
change made to the stiffness on bionic fin rays using
the depressurized jamming method allows bionic
underwater vehicles to adjust stiffness distribution.
According to the results of ground effect on
swimming performance, a proper operational depth is
also beneficial to improve the propulsion
performance of ray-like underwater vehicles.
In the future, a further study in this regard should
focus on two aspects as follows. Firstly, judging on a
serial of frames recorded by the high-speed camera,
the undulatory amplitude of the pectoral fin is
partially limited by the disc-like base that radially
carries dozen of the fin rays. In addition, this
constraint placed on the fin rays results in a slightly
lateral distortion and vibration when these fin rays are
actuated over a certain pressure to perform undulatory
gaits. It is considered as a disadvantage, especially
when loop-controls are introduced into the robotic
system. Therefore, one of the improvement that can
be made in the further research is to chose a more
resilient material to minimize this potential
interference. Secondly, the introduction of loop-
controls to the robotic system is effective in
improving the swimming performance of the bionic
stingray robot. As a support for gathering the
information about motion, a control method based on
Design and Experimental Study of a Pneumatic Bionic Stingray Undulatory Soft Robot
367

nonlinear error feedback controller will be introduced
and a flexible sensor will be fitted on our next-
generation prototype.
ACKNOWLEDGEMENTS
This research was financially supported by the
National Nature Science Foundation of China (No.
91748123).
REFERENCES
Webb, P. (1994). The biology of fish swimming. In L.
Maddock, Q. Bone, & J. Rayner (Eds.), The Mechanics
and Physiology of Animal Swimming (pp. 45-62).
Cambridge: Cambridge University Press.
Liu and Z. Guo, (2018). Ground effect on the hydrodynamic
performance of a flexible hinge-connected fin.
IEEE/ASME Int. Conf. Adv. Intell. Mechatronics,
AIM, vol. 2018-July, pp. 881–886, 2018.
Wu, T. . (1961). Swimming of waving plate. journal of fluid
mechanics, 100.
Rosenberger, L. J., & Westneat, M. W. (1999). Functional
morphology of undulatory pectoral fin locomotion in
the stingray taeniura lymma (chondrichthyes:
dasyatidae).
Rosenberger, L. J., (2001). Pectoral fin locomotion in
batoid fishes: undulation versus oscillation. Journal of
Experimental Biology, 204(Pt 2), 379-394.K.
Urai, R. Sawada, N. Hiasa, M. Yokota, and F. DallaLibera.
.(2015). Design and control of a ray-mimicking soft
robot based on morphological features for adaptive
deformation. Artificial Life & Robotics, 20(3), 237-
243.
Jusufi, A., Vogt, D. M., Wood, R. J., & Lauder, G. V..
(2017). Undulatory swimming performance and body
stiffness modulation in a soft robotic fish-inspired
physical model. soft robot, 202-210.
S. N. Toda Y, Sanada Y, and Danno M. .(2006). The motion
of a fish-like under-water vehicle with two undulating
side fins. Proceedings of the 3rd International
Symposium on Aero Aqua Bio-mechanisms.
Moored, K. W. , Fish, F. E. , & Kemp, T. H. . (2011). Batoid
fishes: inspiration for the next generation of underwater
robots. Marine Technology Society Journal, 45(4).
Moored, K. W. , Dewey, P. A. , Leftwich, M. C. , Bart-
Smith, H. , & Smits, A. J. . (2011). Bioinspired
propulsion mechanisms based on manta ray
locomotion. Marine Technology Society journal, 45(4),
p.110-118.
Chen, Z. , & Bart-Smith, H. . (2012). Bio-inspired robotic
manta ray powered by ionic polymer-metal composite
artificial muscles. International Journal of Smart &
Nano Materials, 3(4), p.296-308.
Chew, C. M. , Lim, Q. Y. , & Yeo, K. S. . (2015).
Development of propulsion mechanism for Robot
Manta Ray. IEEE International Conference on Robotics
& Biomimetics. IEEE.
Fiazza, C. ,Salumae, T. , Listak, M. , Kulikovskis, G. , &
Kruusmaa, M. (2010). Biomimetic mechanical design
for soft-bodied underwater vehicles. Oceans IEEE-
SYDNEY. IEEE.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
368
