
Learn to See by Events:
Color Frame Synthesis from Event and RGB Cameras
Stefano Pini
1 a
, Guido Borghi
2 b
and Roberto Vezzani
1,2 c
1
DIEF - Dipartimento di Ingegneria “Enzo Ferrari”, University of Modena and Reggio Emilia, Italy
2
AIRI - Artificial Intelligence Research and Innovation Center, University of Modena and Reggio Emilia, Italy
Keywords:
Event Cameras, Event Frames, Simulated Event Frames, Color Frame Synthesis, Automotive.
Abstract:
Event cameras are biologically-inspired sensors that gather the temporal evolution of the scene. They capture
pixel-wise brightness variations and output a corresponding stream of asynchronous events. Despite having
multiple advantages with respect to traditional cameras, their use is partially prevented by the limited ap-
plicability of traditional data processing and vision algorithms. To this aim, we present a framework which
exploits the output stream of event cameras to synthesize RGB frames, relying on an initial or a periodic set
of color key-frames and the sequence of intermediate events. Differently from existing work, we propose a
deep learning-based frame synthesis method, consisting of an adversarial architecture combined with a recur-
rent module. Qualitative results and quantitative per-pixel, perceptual, and semantic evaluation on four public
datasets confirm the quality of the synthesized images.
1 INTRODUCTION
Event cameras are neuromorphic optical sensors ca-
pable of asynchronously capturing pixel-wise bright-
ness variations, i.e. events. They are gaining more
and more attention from the computer vision commu-
nity thanks to their extremely high temporal resolu-
tion, low power consumption, reduced data rate, and
high dynamic range (Gallego et al., 2018b).
Moreover, event cameras filter out redundant infor-
mation as their output intrinsically embodies only the
temporal dynamics of the recorded scene, ignoring
static and non-moving areas. On the other hand, stan-
dard intensity cameras with an equivalent frame rate
are able to acquire the whole complexity of the scene,
including textures and colors. However, they usually
require a huge amount of memory to store the col-
lected data, along with a high power consumption and
a low dynamic range (Maqueda et al., 2018).
Given the availability of many mature computer vi-
sion algorithms for standard images, being able to ap-
ply them on event data, without the need of designing
specific algorithms or collecting new datasets, could
contribute to the spread of event sensors.
a
https://orcid.org/0000-0002-9821-2014
b
https://orcid.org/0000-0003-2441-7524
c
https://orcid.org/0000-0002-1046-6870
Differently from existing works, which are built
on filter- and optimization-based algorithms (Brandli
et al., 2014b; Munda et al., 2018; Scheerlinck et al.,
2018), in this paper we investigate the use of deep
learning-based approaches to interpolate frames from
a low frame rate RGB camera using event data.
In particular, we propose a model that synthesizes
color or gray-level frames preserving high-quality
textures and details (Fig. 1) thus allowing the use of
traditional vision algorithms like object detection and
semantic segmentation networks.
We explore the use of a conditional adversarial net-
work (Mirza and Osindero, 2014) in conjunction with
a recurrent module to estimate RGB frames, relying
on an initial or a periodic set of color key-frames and
a sequence of event frames, i.e. frames that collect
events occurred in a certain amount of time.
Moreover, we propose to use simulated event data,
obtained by means of image differences, to train our
model: this solution leads to two significant advan-
tages. First, event-based methods can be evaluated on
standard datasets with annotations, which are often
not available in the event domain. Second, learned
models can be trained on simulated event data and
used with real event data, unseen during the train-
ing procedure. In general, we propose to shift from
event-based context to a domain where more exper-
tise is available in terms of mature vision algorithms.
Pini, S., Borghi, G. and Vezzani, R.
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras.
DOI: 10.5220/0008934700370047
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
37-47
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
37
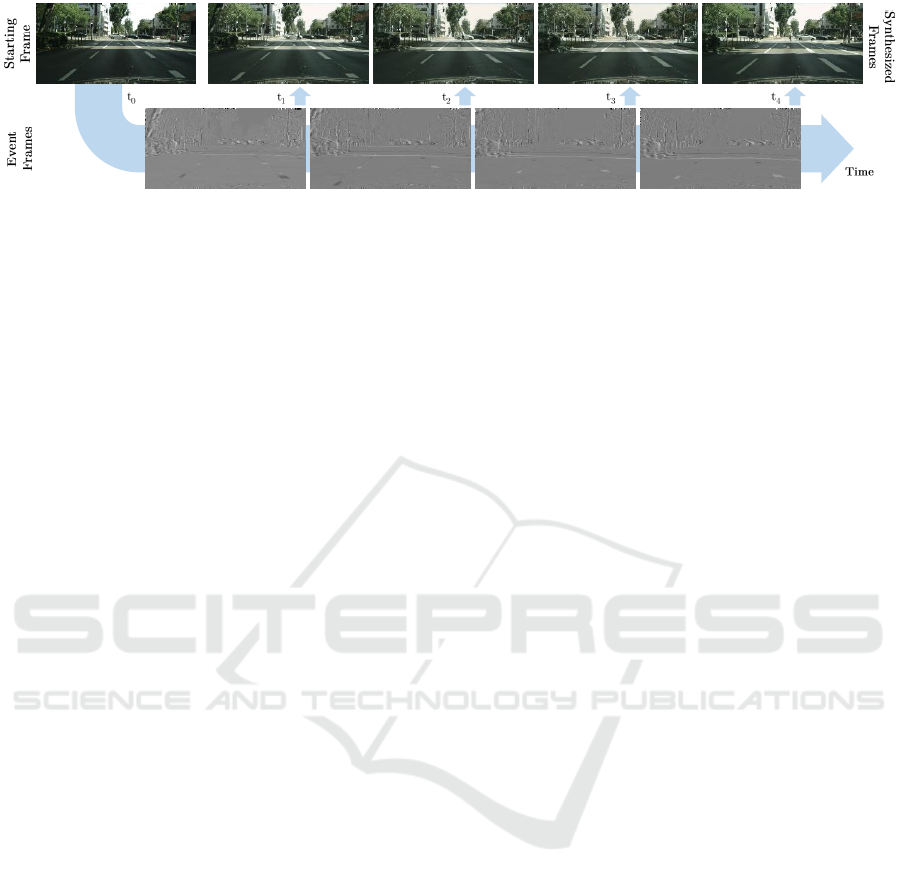
Figure 1: Sample frames synthesized by the proposed framework. Given an initial RGB frame at time t
0
and a set of following
event frames at time t
1
, ..., t
n
as input, the proposed framework accordingly synthesizes an RGB frame for each time step.
As a case study, we embrace the automotive context,
in which event and intensity cameras could cover a
variety of applications (Borghi et al., 2019; Frigieri
et al., 2017). For instance, the growing number of
high-quality cameras placed on recent cars implies the
use of a large bandwidth in the internal and the ex-
ternal network: sending only key-frames and events
might be a way to reduce the bandwidth requirements,
still maintaining a high temporal resolution.
We probe the feasibility of the proposed model testing
it on four automotive and publicly-released datasets,
namely DDD17 (Binas et al., 2017), MVSEC (Zhu
et al., 2018), Kitti (Geiger et al., 2013), and
Cityscapes (Cordts et al., 2016).
Summarizing, our contributions are threefold: i) we
propose a framework based on a conditional adver-
sarial network that performs the synthesis of color or
gray-level frames. ii) we investigate the use of simu-
lated event frames to train systems able to work with
real event data; iii) we probe the effectiveness of the
proposed method employing four public automotive
datasets, investigating the ability to generate realistic
images, preserving colors, objects, and the semantic
information of the scene.
2 RELATED WORK
Event-based vision has recently attracted the attention
of the computer vision community. In the last years,
event-based cameras, also known as neuromorphic
sensors or Dynamic Vision Sensors (DVSs) (Licht-
steiner et al., 2006), have been mainly explored for
monocular (Rebecq et al., 2016) and stereo depth
estimation (Andreopoulos et al., 2018; Zhou et al.,
2018), optical flow prediction (Gallego et al., 2018b)
as well as for real time feature detection and track-
ing (Ramesh et al., 2018; Mitrokhin et al., 2018) and
ego-motion estimation (Maqueda et al., 2018; Gal-
lego et al., 2018a). Moreover, various classification
tasks were addressed employing event-based data, as
classification of faces (Lagorce et al., 2017) and ges-
tures (Lungu et al., 2017).
Recently, a limited amount of work focused on
the reconstruction of intensity images or videos from
event cameras. Bardow (Bardow et al., 2016) pro-
posed an approach to simultaneously estimate the
brightness and the the optical flow of the recorded
scene: the optical flow was shown to be necessary to
correctly recover sharp edges, especially in presence
of fast camera movements.
In (Reinbacher et al., 2016) and its extended ver-
sion (Munda et al., 2018), a manifold regulariza-
tion method was used to reconstruct intensity images.
However, predicted images exhibit significant visual
artifacts and a relatively high noise. (Munda et al.,
2018) and the method proposed by (Kim et al., 2014)
show best visual results under limited camera or sub-
ject movements.
Brandli (Brandli et al., 2014b) investigated the
video decompression task and proposed an online
event-based method that relies on an optimization al-
gorithm. The synthesized image is reset with ev-
ery new frame to limit the growth of the integration
error. In (Scheerlinck et al., 2018), a continuous-
time intensity estimation using event data is intro-
duced. This method is based on a complementary fil-
ter, which is able to exploit both intensity frames and
asynchronous events to output the gray-level image.
We point out that, as highlighted in (Scheerlinck et al.,
2018), optimitazion- and filter-based methods imply
the tuning of several parameters (such as the con-
trast threshold and the event-rate) for each record-
ing scenario. This could limit the usability and the
generalization capabilities of those methods. In fact,
in (Scheerlinck et al., 2018) these parameters are
tuned for each testing sequence in order to improve
the intensity estimation.
Recently, in (Pini et al., 2019) an encoder-decoder
architecture has been proposed to synthesize only
gray-level frames starting from event data. The pro-
posed approach is limited since neither an adversarial
approach nor color frame information have been ex-
ploited to improve the final result.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
38
𝐼(𝑡)
ሚ
𝐼(𝑡 + 1)
ሚ
𝐼(𝑡 + 𝑛)
Resized
videoclip
112
112
112
112
ሚ
𝐼(𝑡 + 1)
𝐼(𝑡)
Φ
𝜏
(𝑡)
ሚ
𝐼(𝑡 + 1)
ሚ
𝐼(𝑡 + 𝑛)
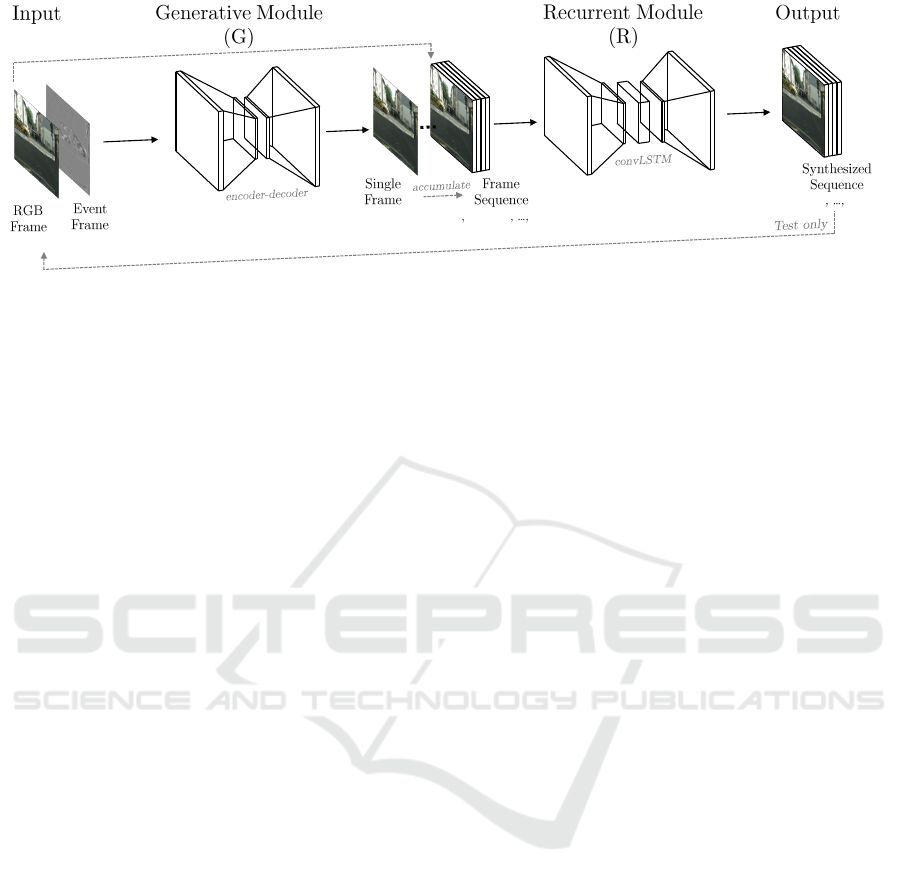
Figure 2: Overview of the proposed framework. The input of the Generative Module is the initial intensity frame I(t) and
the corresponding event frame Φ
τ
(t). I(t) and the generated frames
˜
I(t
i
) are then stacked and used as input for the Recurrent
Module that learns how to refine contextual details and maintain the temporal coherence between consecutive frames. At
testing time, the output of the Recurrent Module is used in the next forward step as the new input frame of the framework.
In the method proposed by (Rebecq et al., 2019), a
deep learning-based architecture is presented in order
to reconstruct gray-level frames directly from event
data, represented as a continuous stream of events
along the acquisition time. The use of raw event data
makes this method difficult to compare to the ours.
3 MATHEMATICAL
FORMULATION
In this section, we present definitions and mathemati-
cal notations for events and event frames, followed by
their relation to intensity images and the formulation
of the proposed task, i.e. the intensity frame synthesis.
3.1 Event Frames
Following the notation proposed in (Maqueda et al.,
2018), the k-th event e
k
captured by an event camera
can be represented as:
e
k
= (x
k
, y
k
, t
k
, p
k
) (1)
where x
k
, y
k
, and t
k
are the spatio-temporal coordi-
nates of a brightness change and p
k
∈ {−1, +1} spec-
ifies the polarity of this change, which can be either
positive or negative.
By summing up all events captured in a time inter-
val ∆t = [t, t + τ] at a pixel-wise level, an event frame
Φ
τ
(t) is obtained, integrating all the events occurred
in that time interval. Formally, an event frame can be
defined as:
Φ
τ
(t) =
∑
e
k
∈E
t, τ
p
k
(2)
where E
t,τ
=
{
e
k
|t
k
∈ [t, t +τ]
}
. Therefore, an event
frame could be represented as a gray-level image of
size 1 × w × h, which summarizes all events occurred
in a certain time interval in a single channel. For
numerical reasons, Φ
τ
(t) saturates if the amount of
events exceeds the number of gray levels used to rep-
resent the event frame image.
3.2 Intensity Frame Synthesis
The core of the proposed approach consists in learn-
ing a parametric function
Γ : R
c×w×h
× R
1×w×h
−→ R
c×w×h
(3)
that takes as input a c-channel intensity image I
t
∈
R
c×w×h
captured at time t and an event frame
Φ
τ
(t) ∈ R
1×w×h
, which combines pixel-level bright-
ness changes between times t and t + τ, and outputs
the predicted intensity image
˜
I(t + τ) ∈ R
c×w×h
at
time t + τ. Here, w and h represent the width and the
height of both intensity images and event frames.
It follows that
˜
I(t + τ) = Γ(I(t), Φ
τ
(t), θ) (4)
where θ corresponds to the parameters of the func-
tion Γ, that we define as the combination of multiple
parametric functions (Sec. 4).
3.3 Difference of Images as Event
Frames
Event cameras are naturally triggered by pixel-level
logarithmic brightness changes and thus they provide
some output data only if there is a relative movement
between the sensor and the objects in the scene or a
brightness change occurs (Gehrig et al., 2018). For
small time intervals, i.e. small values of τ, the bright-
ness variation can be approximated with a first-order
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
39

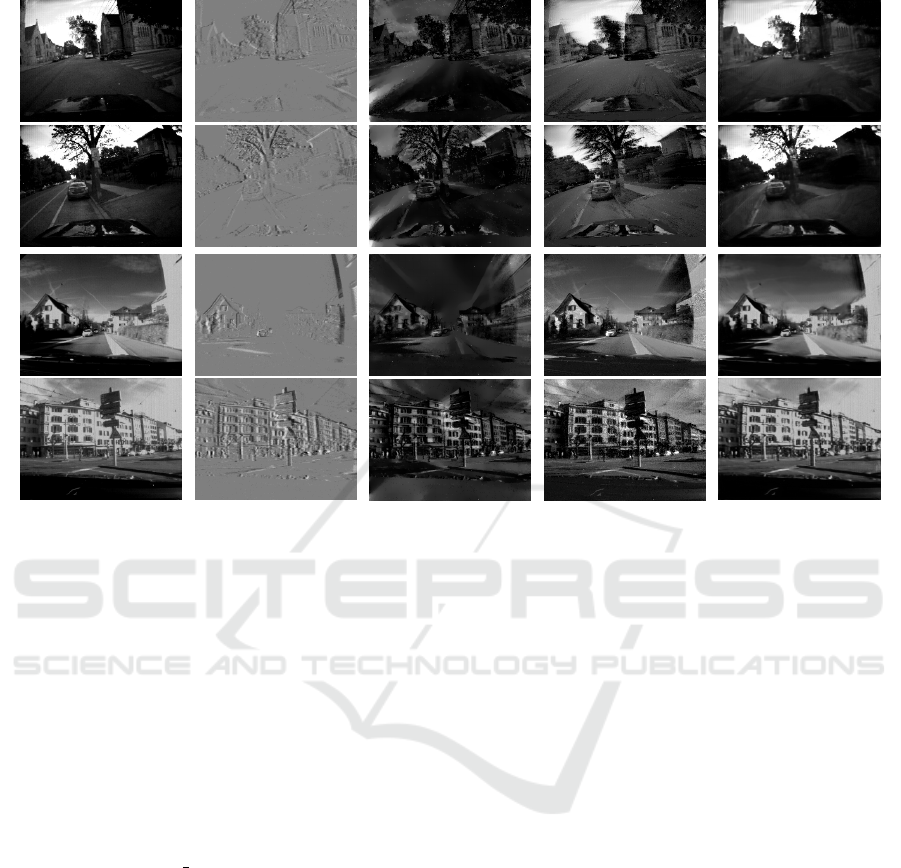
Figure 3: Sample output frames from Kitti dataset (Geiger et al., 2013). The ground truth is placed on the first column, then
the output of the Generative Module without (G*) and with (G) the discriminator (cfr. Section 4.1) and finally the output of
the Recurrent Module (R), that is able to preserve more realistic colors, enhance contrast and reduce visual artifacts.
Taylor’s approximation as:
lim
τ→0
δL
δt
τ ≈ L(t + τ) − L(t)
.
= ∆L (5)
where L(t) = log(Br (I(t))), I(t) is the image ac-
quired at time t and Br(·) is a function to con-
vert a c-channel image into the corresponding single-
channel brightness. In the experiments, for in-
stance, RGB images are converted into brightness im-
ages using the standard channel weights defined as
[0.299, 0.587, 0.114].
Therefore, an event frame Φ
τ
(t) can be approximated
as follows:
Φ
τ
(t) ≈ ∆L = log [Br (I(t + τ))] −log [Br (I(t))] (6)
Thanks to this assumption, given two intensity frames
I(t) and I(t + τ), it is possible to retrieve the cor-
responding event frame Φ
τ
(t) for small values of
τ. However, since intensity frames have more than
one channel (e.g. , three channels for RGB images),
I(t +τ) cannot be analytically obtained given I(t) and
Φ
τ
(t).
4 IMPLEMENTATION
An overview of the proposed architecture is depicted
in Figure 2. The framework integrates two main com-
ponents. The first one – the Generative Module (G)
– receives an intensity image I(t) and an event frame
Φ
τ
(t) as input and synthesizes the frame I(t + τ) as
output.
The second one – the Recurrent Module (R) – refines
the output of the Generative component, relying on
the temporal coherence of a sequence of frames.
4.1 Generative Module
We follow the conditional GAN paradigm (Mirza and
Osindero, 2014; Isola et al., 2017; Borghi et al., 2018)
for the designing of the Generative Module.
The module consists of a generative network G and
a discriminative network D (Goodfellow et al., 2014;
Mirza and Osindero, 2014). Exploiting the U-Net ar-
chitecture (Ronneberger et al., 2015), G is defined as
a fully-convolutional deep neural network with skip
connections between layers i and n − i, where n is the
total number of layers. The discriminative network
proposed by (Isola et al., 2017) is employed as D.
In formal terms, G corresponds to an estimation
function that predicts the intensity frame
˜
I(t + τ) =
G(I(t) ⊕ Φ
τ
(t)) from the concatenation of an inten-
sity frame and an event frame at time t (cfr. Equa-
tion 4) while D corresponds to a discriminative func-
tion able to distinguish between real and generated
frames.
The training procedure can be formalized as the opti-
mization of the following min-max problem:
min
θ
G
max
θ
D
E
x∼p(x),y∼p(y)
[logD(x, y)]
+ E
x∼p(x)
[log(1 − D(x, G(x)))]
(7)
where D(x, y) is the probability of being a real frame
and 1 − D(x, G(x)) is the probability to be a synthe-
sized frame, p(x) is the distribution of concatenated
frames I(t) ⊕ Φ
τ
(t), and p(y) is the distribution of
frames
˜
I(t + τ).
This approach leads to a Generative Module which is
capable of translating pixel intensities accordingly to
an event frame and producing output frames that are
visually similar to the real ones.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
40
Table 1: Comparison between the proposed method and state of the art approaches using per-pixel and perceptual metrics.
Dataset Method
Norm ↓ RMSE ↓ Threshold ↑ Indexes ↑
Perceptual ↓
L
1
L
2
Lin Log Scl 1.25
1.25
2
1.25
3
PSNR SSIM LPIPS
DDD17
Munda et al.
0.268 94.277 0.314 5.674 5.142 0.152 0.448 0.536 10.244 0.216 0.637
Scheerlinck et al.
0.080 29.249 0.098 4.830 4.352 0.671 0.781 0.827 20.542 0.702 0.208
Pini et al.
0.027 8.916 0.040 4.048 3.571 0.775 0.848 0.875 29.176 0.864 0.105
Ours
0.022 8.583 0.039 3.766 3.408 0.787 0.855 0.880 29.428 0.884 0.107
MVSEC
Munda et al.
0.160 86.419 0.288 8.985 8.016 0.088 0.163 0.232 11.034 0.181 0.599
Scheerlinck et al.
0.067 26.794 0.089 7.313 6.982 0.263 0.357 0.467 21.070 0.551 0.257
Pini et al.
0.026 12.062 0.054 6.443 6.102 0.525 0.642 0.708 25.866 0.740 0.172
Ours
0.022 11.216 0.051 6.559 6.003 0.514 0.637 0.699 26.366 0.845 0.137
4.2 Recurrent Module
The architecture of the Recurrent Module is a com-
bination of an encoder-decoder architecture and a
Convolutional LSTM (ConvLSTM) module (Xingjian
et al., 2015). The underlying idea is that while the
Generative Module learns how to successfully com-
bine intensity and event frames, the Recurrent Mod-
ule, capturing the context of the scene and its tempo-
ral evolution, learns to visually refine the synthesized
frames, removing artifacts, enhancing colors, and im-
proving the temporal coherence.
We adopt the same U-Net architecture of the Gen-
erative Module and we insert a 512-channel two-
layer ConvLSTM block in the middle of the hourglass
model. During the training phase, the Recurrent Mod-
ule receives as input a sequence of frames produced
by the Generative Module and outputs a sequence of
the same length, sequentially updating the internal
state. The activation of each ConvLSTM layer can
be defined as follows:
I
s
= σ(W
i
∗ X
s
+U
i
∗ H
s−1
+ b
i
) (8)
F
s
= σ(W
f
∗ X
s
+U
f
∗ H
s−1
+ b
f
) (9)
O
s
= σ(W
o
∗ X
s
+U
o
∗ H
s−1
+ b
o
) (10)
G
s
= tanh(W
c
∗ X
s
+U
c
∗ H
s−1
+ b
c
) (11)
C
s
= F
s
C
s−1
+ I
s
G
s
(12)
H
s
= O
s
tanh(C
s
) (13)
where, I
s
, F
s
, O
s
are the gates, C
s
, C
s−1
are the mem-
ory cells, G
s
is the candidate memory, and H
s
, H
s−1
are the hidden states. Each b is a learned bias, each W
and U are a learned convolutional kernel, and X
s
cor-
responds to the input. Finally, ∗ represents the convo-
lutional operator while is the element-wise product.
4.3 Training Procedure
The framework is trained in two consecutive steps.
In the first phase, the Generative Module G is
trained following the adversarial approach detailed
in Section 4.1. We optimize the network using
Adam (Kingma and Ba, 2014) with learning rate
0.0002, β
1
= 0.5, β
2
= 0.999, and a batch size of 8. In
order to improve the stability of the training process,
the discriminator is updated every 8 training steps of
the generator. The objective function of D is the com-
mon binary categorical cross entropy loss, while the
objective function of G is a weighted combination of
the adversarial loss (i.e. the binary crossentropy) and
the Mean Squared Error (MSE) loss.
In the second phase, the Recurrent Module R is
trained while keeping the parameters of the Gener-
ative Module fixed. We apply the Adam optimizer
with the same hyper-parameters we used for the Gen-
erative Module, with the exception of the batch size
which is set to 4. The objective function of the mod-
ule is a weighted combination of the MSE loss and
the Structural Similarity index (SSIM) loss which is
defined as:
SSIM(p, q) =
(2µ
p
µ
q
+ c
1
)(2σ
pq
+ c
2
)
(µ
2
p
+ µ
2
q
+ c
1
)(σ
2
p
+ σ
2
q
+ c
2
)
(14)
Given two windows p, q of equal size, µ
p,q
, σ
p,q
are
the mean and variance of p, q while c
1,2
are used to
stabilize the division. See (Wang et al., 2004) for fur-
ther details. The losses are combined with a weight
of 0.5 each. The network is trained with a fixed se-
quence length, which corresponds to the length of the
sequences used during the evaluation phase.
Only during the testing phase, to obtain a sequence of
synthesized frames, the framework receives as input
the previously-generated images or an intensity key-
frame.
5 FRAMEWORK EVALUATION
In this section, we present the datasets that we used
to train and test the proposed framework. Then, we
describe the evaluation procedure that has been em-
ployed to assess the quality of the synthesized frames,
followed by the report of the experimental results and
their analysis.
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
41
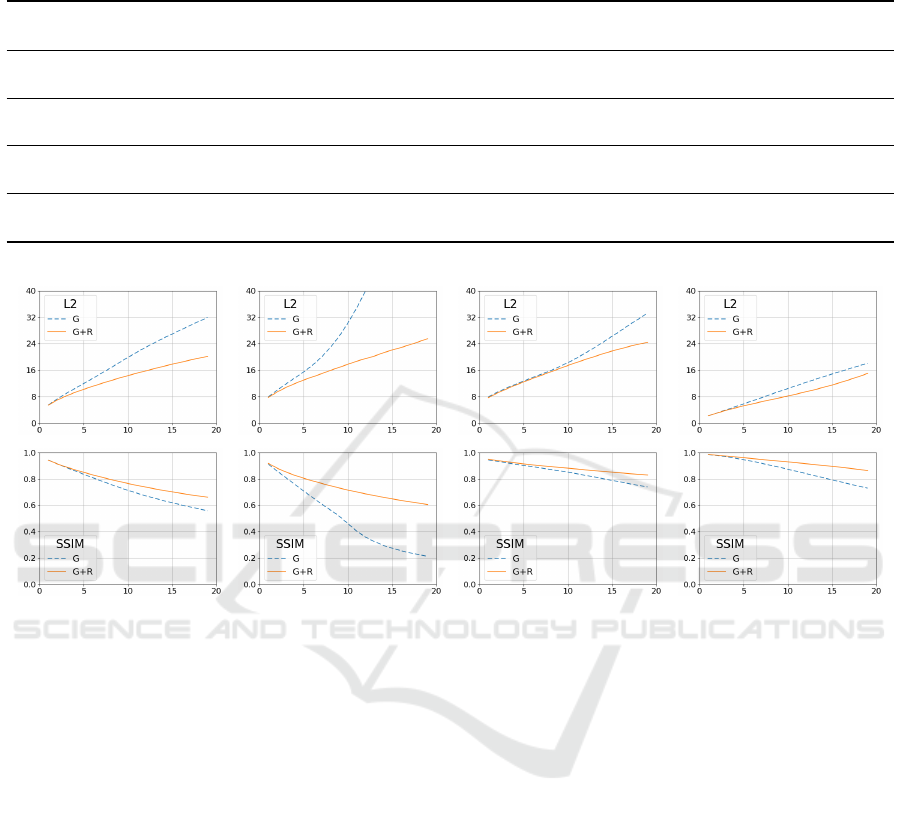
Table 2: Experimental results of pixel-wise metrics computed on synthesized frames from DDD17, MVSEC, Kitti, and
Cityscapes (CS) datasets. Details on adopted metrics are reported in Section 5.2. Tests are carried out employing the Gener-
ative Module (G), and both the Generative and Recurrent Module (G+R).
Dataset Model
Norm ↓ Difference ↓ RMSE ↓ Threshold ↑ Indexes↑
L
1
L
2
Abs Sqr Lin Log Scl 1.25
1.25
2
1.25
3
PSNR SSIM
DDD17
G
0.029 9.658 0.114 0.007 0.044 2.296 2.268 0.854 0.919 0.941 28.486 0.876
G+R
0.022 8.583 0.167 0.006 0.039 3.766 3.408 0.787 0.855 0.880 29.428 0.884
MVSEC
G
0.026 12.830 0.311 0.013 0.058 6.302 6.233 0.562 0.675 0.733 25.309 0.784
G+R
0.022 11.216 0.354 0.010 0.051 6.559 6.003 0.514 0.637 0.699 26.366 0.845
Kitti
G
0.030 10.95 0.125 0.006 0.048 0.472 0.463 0.782 0.940 0.981 27.140 0.919
G+R
0.029 10.71 0.105 0.005 0.046 0.194 0.191 0.846 0.968 0.991 27.295 0.928
CS
G
0.019 4.534 0.086 0.003 0.025 0.232 0.211 0.877 0.974 0.992 32.769 0.962
G+R
0.015 4.192 0.059 0.002 0.023 0.172 0.170 0.968 0.997 0.999 33.315 0.971
DDD17 MVSEC Kitti Cityscapes
Figure 4: Variation of L
2
and SSIM as a function of the i-th synthesized frame since the last key-frame by the Generative
Module, without (blue) and with (orange) the discriminator, and the Recurrent Module (green), computed on DDD17, MVSEC,
Kitti, and Cityscapes. The horizontal axis refers to the frame on which the metric is calculated, starting from an initial color
frame and estimating the following ones.
5.1 Datasets
Due to the recent commercial release of event
cameras, only few event-based datasets are cur-
rently publicly-released and available in the literature.
These datasets still lack the data variety and the an-
notation quality which is common for RGB datasets.
These considerations have motivated us to exploit the
mathematical intuitions presented in Section 3.3 in
order to take advantage of non-event public automo-
tive datasets (Geiger et al., 2013; Cordts et al., 2016),
which are richer in terms of annotations and data
quality, along with two recent event-based automotive
datasets (Binas et al., 2017; Zhu et al., 2018).
DDD17. Binas et al. (Binas et al., 2017) introduced
DDD17: End-to-end DAVIS Driving Dataset, which
is the first open dataset of annotated event driving
recordings. The dataset is captured by a DAVIS sen-
sor (Brandli et al., 2014a) and includes both gray-
level frames (346 × 260 px) and event data. Se-
quences are captured in urban and highway scenar-
ios, during day and night and under different weather
conditions. Similar to (Maqueda et al., 2018), ex-
periments are carried out selecting only sequences la-
belled as day, day wet, and day sunny, but we cre-
ate train, validation, and test split using different se-
quences.
MVSEC. The Multi Vehicle Stereo Event Camera
Dataset (Zhu et al., 2018) contains data acquired from
four different vehicles, in both indoor and outdoor
environments, during day and night, using a pair of
DAVIS 346B event cameras (346 × 260 px), a stereo
camera, and a Velodyne lidar. In this paper, we use
only the outdoor car scenes recorded during the day.
From these, we select the first 70% as train set, and
the following as validation (10%) and test (20%) set.
Kitti. The Kitti Vision Benchmark Suite was intro-
duced in (Geiger et al., 2012). In this work, we use
the KITTI raw (Geiger et al., 2013) subset, which in-
cludes 6 hours of 1242 × 375 rectified RGB image
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
42
Ground Truth Event Frame Munda et al. Scheerlinck et al. Ours
Figure 5: Output of the proposed algorithm compared to existing methods on MVSEC and DDD17 datasets.
sequences captured on different road scenarios with a
temporal resolution of 10Hz. The dataset is rich of an-
notations, as depth maps and semantic segmentation.
We adopt the train and the validation split proposed
in (Uhrig et al., 2017) to respectively train the method
and to validate and test it.
Cityscapes. The Cityscapes dataset (Cordts et al.,
2016) consists of thousands of RGB frames with a
high spatial resolution (2048 × 1024 px) and shows
varying and complex scene layouts and backgrounds.
Fine and coarse annotations of 30 different object
classes are provided as both semantic and instance-
wise segmentation. We select a particular subset,
namely leftImg8bit sequence, following official
splits, in order to use sequences with a frame rate of
17Hz and to have access to fine semantic segmenta-
tion annotations.
5.2 Metrics
Inspired by (Eigen et al., 2014; Isola et al., 2017),
we exploited a variety of metrics to check the qual-
ity of the generated images, being aware that evalu-
ating synthesized images is, in general, a still open
problem (Salimans et al., 2016). We firstly design a
set of experiments in order to investigate the contribu-
tion of each single module of the proposed framework
and to compare it with state-of-art methods by using
pixel-wise and perceptual metrics. Then, we exploit
off-the-shelf networks pre-trained on public datasets
in order to evaluate semantic segmentation and object
detection scores on generated images.
Pixel-wise and Perceptual Metrics. A collection
of evaluation metrics is used to assess the quality
of the synthesized images. In particular, we report
the L1 and L2 distance, the root mean squared er-
ror (RMSE), and the percentage of pixel under a cer-
tain error threshold (δ-metrics). Moreover, we in-
clude the Peak Signal-to-Noise Ratio (PSNR), which
estimates the level of noise in logarithmic scale, and
the Structural Similarity (SSIM) (Wang et al., 2004),
which measures the perceived closeness between two
images. Finally, the visual quality of the generated
images is assessed through the Learned Perceptual
Image Patch Similarity (LPIPS) (Zhang et al., 2018)
which was shown to correlate well with human judge-
ment (Zhang et al., 2018).
Semantic Segmentation Score. We adopt a pre-
trained semantic classifier to measure the accuracy
of a certain set of pixels to be a particular class.
Specifically, we rely on the validation set of the
Kitti and Cityscapes dataset. If synthesized im-
ages are close to the real ones, the classifier will
achieve a comparable accuracy to the one obtained
on the reference dataset. We adopt the recent state-
of-art WideResNet+38+DeepLab3 (Rota Bul
`
o et al.,
2018) trained on the original train annotations of the
Cityscapes dataset. Since semantic fine annotations
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
43
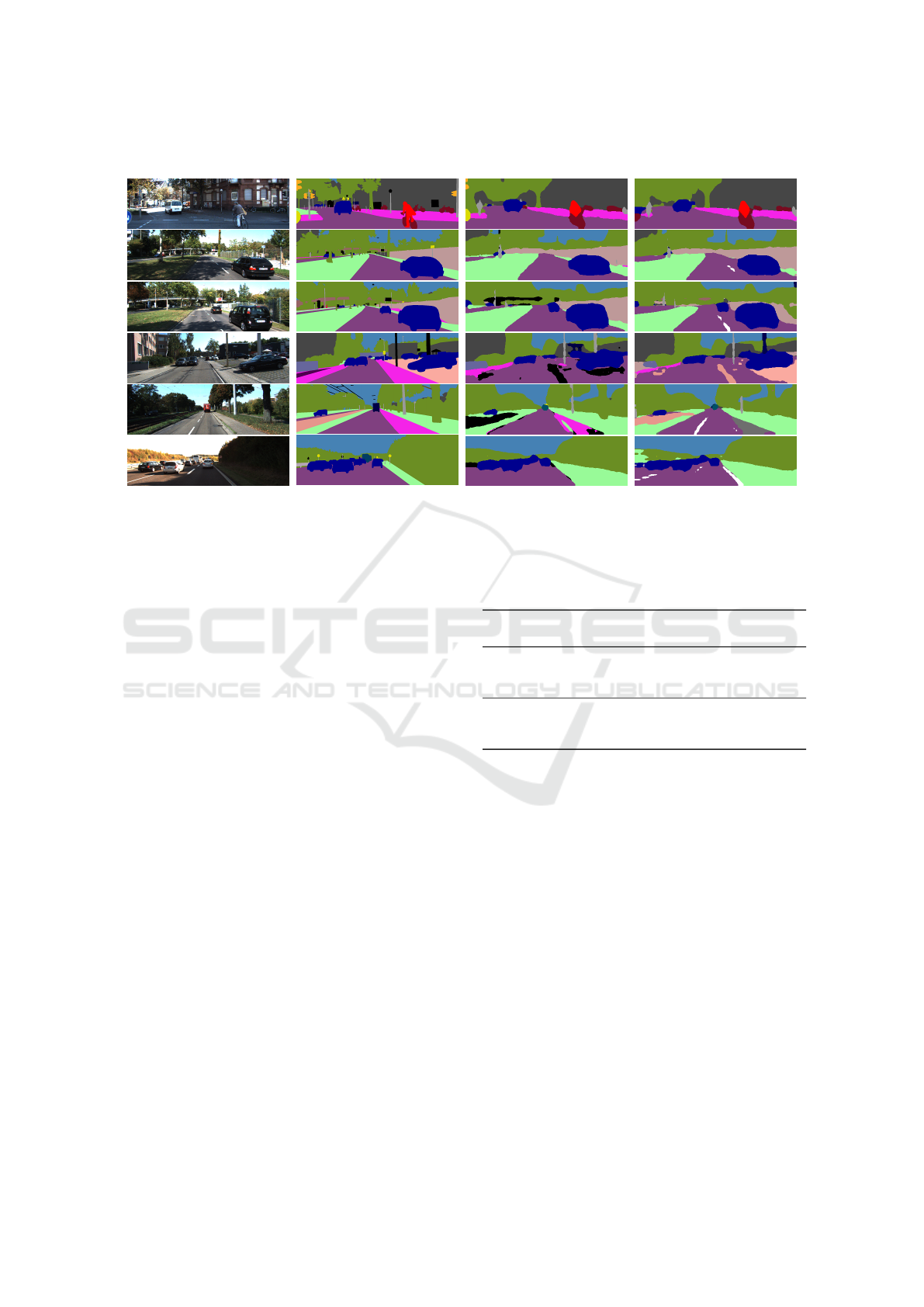
Original Ground Truth SS on Original SS on Ours
Figure 6: Semantic Segmentation (SS) applied on Kitti dataset (Geiger et al., 2013). From left, we report the original RGB
frame, the ground truth of the semantic segmentation and then the segmentation computed on original and synthesised frames.
are provided only for a limited subset of frames in
each sequence, we compare these annotations with
the semantic maps produced using as input the last
frame of a synthesized sequence (i.e. the worst case).
Object Detection Score. A pre-trained object de-
tector is employed in order to investigate if the pro-
posed model is able to preserve details, locations,
and realistic aspect of the objects that appear in the
scene. We adopt the popular Yolo-v3 network (Red-
mon and Farhadi, 2018), a real-time state-of-the-art
object detection system, pre-trained on the COCO
dataset (Lin et al., 2014). In this way, since we use
automotive datasets, we investigate the ability of the
proposed framework to preserve objects in the gener-
ated frames, in particular people, trucks, cars, buses,
trains, and stop signals.
5.3 Experimental Results
For a fair comparison, we empirically set the same
sequence length of 6 synthesized frames for every ex-
periment and competitor method reported in this sec-
tion. We split data following the training and test-
ing sets of each dataset, and we use the validation
set to stop the training procedure. When considering
DDD17 and MVSEC, only real event data are used
while we obtain synthetic event frames on Kitti and
Cityscapes. We adapt the image resolution of the
original data to comply with the U-Net architecture
(see Sec. 4.1) requirements while trying to keep the
original image aspect ratio. Therefore, we adopt input
images with a spatial resolution of 416×128 for Kitti,
Table 3: Semantic Segmentation and Object Detection
scores computed on synthesized frames from Kitti and
Cityscapes. Results are compared with the Ground Truth
(GT), when available.
Data Model
Semantic Segmentation ↑ Object Det. ↑
Per-pixel Per-class class IoU mIoU %
Kitti
G 0.814 0.261 0.215 0.914 65.8
G+R 0.813 0.261 0.215 0.912 71.4
GT 0.827 0.283 0.235 - -
CS
G 0.771 0.197 0.162 0.924 83.5
G+R 0.790 0.201 0.166 0.926 86.4
GT 0.828 0.227 0.192 - -
256 × 128 for Cityscapes, and 256 × 192 for DDD17
and MVSEC.
In Table 1, per-pixel evaluation shows that our
model overcomes all the competitors on both the
event-based DDD17 and MVSEC datasets. We point
out that (Munda et al., 2018) is based only on event
data while the input of (Scheerlinck et al., 2018; Pini
et al., 2019) are both gray-level images and events,
similarly to our method. According to Table 1, the vi-
sual results reported in Figure 5 confirm the superior
quality of the images synthesized by our method and
suggest that the proposed learning-based approach
can be an alternative of filter-based algorithms. In-
deed, visual artifacts (e.g. shadows) and high noise
(e.g. salt and pepper) are visible in the competitor
generated frames while our method produces more
accurate brightness levels. In addition, competitors
are limited to the gray-level domain only.
As an ablation study, we exploit the pixel-wise
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
44

Original OD on original OD on Ours
Figure 7: Object Detection (OD) on Cityscapes dataset (Cordts et al., 2016).
metrics also to understand the contribution of each
single module of the proposed system. Table 2 and
Figure 3 show that the output of the Generative Mod-
ule has a good level of quality and learns efficiently
to alter pixel values accordingly to event frames. Re-
current Module visually improves the output frames,
enhancing the colors, the level of details, and the tem-
poral coherence.
Generally, we note that the low quality of the gray-
level images provided in DDD17 and MVSEC par-
tially influences the performance of the framework.
In Table 3, results are reported in terms of per-
pixel, per-class, and IoU accuracy for the Semantic
Segmentation score and in terms of mean IoU and
percentage of the correctly detected objects for the
Object Detection score.
Segmentation results confirm that our approach can
be a valid option to avoid the development of com-
pletely new vision algorithms relying on event data.
Also in this case, the Recurrent Module improves the
final score (Fig. 6). The Object Detection scores are
reported in Table 3 in terms of mean IoU on detec-
tion bounding boxes and the percentage of objects de-
tected with respect to the Yolo-v3 network detections
on the ground truth images. Object detection scores
are interesting, since we note that even though the
mean IoU computed is similar, the Recurrent Mod-
ule allows to find a higher number of detections, sug-
gesting that the synthesized frames are visually sim-
ilar to the corresponding real ones, as shown in Fig-
ure 7. Through these tests, we verify the capability of
the proposed framework to preserve objects and se-
mantic information in the synthesized frames, which
is mandatory for employing the proposed method in
real-world automotive scenarios.
Finally, we conduct a cross-modality test: we train
our model on DDD17 and MVSEC datasets, using as
event frame the logarithmic difference of two con-
secutive frames (i.e. simulated event frames). Then,
we test the network using as input real event frames,
without any fine-tuning procedure. On the DDD17
dataset we obtain PSNR of 23.396 and SSIM of
0.779, and values of 21.935 and 0.736 on the MVSEC
dataset. These results confirm the ability of the pro-
posed system to deal with both simulated (during
train) and real (during test) event data. Furthermore,
it is proved that the logarithmic difference of gray-
scale images can be efficiently used in place of real
event frames, introducing the possibility to use com-
mon RGB dataset and their annotations to simulate
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
45

the input of an event camera, in the form of event
frames.
In Figure 4, we plot L2 and SSIM values for each
frame within a synthesized sequence, showing the
performance drop with respect to the number of gen-
erated frames from the last key-frame. As expected,
the contribution of the Recurrent Module increases
along with the length of the sequence, confirming
the effectiveness of the proposed model in the long-
sequence generation task.
Our system implementation, tested on a NVidia
1080Ti, takes an average time of 47.6± 3.7ms to syn-
thesize a single image, reaching a frame rate of about
20Hz.
6 CONCLUSION
In this paper, we propose a framework able to syn-
thesize color frames, relying on an initial or a peri-
odic set of key-frames and a sequence of event frames.
The Generative Module produces an intermediate out-
put, while the Recurrent Module refines it, preserving
colors and enhancing the temporal coherence. The
method is tested on four public automotive datasets,
obtaining state-of-art results.
Moreover, semantic segmentation and object detec-
tion scores show the possibility to run traditional vi-
sion algorithms on synthesized frames, reducing the
need of developing new algorithms or collecting new
annotated datasets.
ACKNOWLEDGEMENTS
This work has been partially founded by the project
“Far 2019 - Metodi per la collaborazione sicura tra
operatori umani e sistemi robotici” (Methods for safe
collaboration between human operators and robotic
systems) of the University of Modena and Reggio
Emilia.
REFERENCES
Andreopoulos, A., Kashyap, H. J., Nayak, T. K., Amir,
A., and Flickner, M. D. (2018). A low power, high
throughput, fully event-based stereo system. In IEEE
International Conference on Computer Vision and
Pattern Recognition, pages 7532–7542.
Bardow, P., Davison, A. J., and Leutenegger, S. (2016). Si-
multaneous optical flow and intensity estimation from
an event camera. In IEEE International Conference
on Computer Vision and Pattern Recognition, pages
884–892.
Binas, J., Neil, D., Liu, S.-C., and Delbruck, T. (2017).
Ddd17: End-to-end davis driving dataset. Work-
shop on Machine Learning for Autonomous Vehicles
(MLAV) in ICML 2017.
Borghi, G., Fabbri, M., Vezzani, R., Cucchiara, R., et al.
(2018). Face-from-depth for head pose estimation on
depth images. IEEE transactions on pattern analysis
and machine intelligence.
Borghi, G., Pini, S., Vezzani, R., and Cucchiara, R. (2019).
Driver face verification with depth maps. Sensors,
19(15):3361.
Brandli, C., Berner, R., Yang, M., Liu, S.-C., and Delbruck,
T. (2014a). A 240× 180 130 db 3 µs latency global
shutter spatiotemporal vision sensor. IEEE Journal of
Solid-State Circuits, 49(10):2333–2341.
Brandli, C., Muller, L., and Delbruck, T. (2014b). Real-
time, high-speed video decompression using a frame-
and event-based davis sensor. In 2014 IEEE Interna-
tional Symposium on Circuits and Systems (ISCAS),
pages 686–689. IEEE.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic ur-
ban scene understanding. In IEEE International Con-
ference on Computer Vision and Pattern Recognition,
pages 3213–3223.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. In Neural Information Processing Sys-
tems, pages 2366–2374.
Frigieri, E., Borghi, G., Vezzani, R., and Cucchiara, R.
(2017). Fast and accurate facial landmark localization
in depth images for in-car applications. In Interna-
tional Conference on Image Analysis and Processing,
pages 539–549. Springer.
Gallego, G., Lund, J. E., Mueggler, E., Rebecq, H., Del-
bruck, T., and Scaramuzza, D. (2018a). Event-based,
6-dof camera tracking from photometric depth maps.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 40(10):2402–2412.
Gallego, G., Rebecq, H., and Scaramuzza, D. (2018b). A
unifying contrast maximization framework for event
cameras, with applications to motion, depth, and op-
tical flow estimation. In IEEE International Confer-
ence on Computer Vision and Pattern Recognition,
volume 1.
Gehrig, D., Rebecq, H., Gallego, G., and Scaramuzza, D.
(2018). Asynchronous, photometric feature tracking
using events and frames. In European Conference on
Computer Vision.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. International
Journal of Robotics Research (IJRR).
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In IEEE International Conference on Computer
Vision and Pattern Recognition.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
46

gio, Y. (2014). Generative adversarial nets. In Neural
Information Processing Systems, pages 2672–2680.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In IEEE International Conference on
Computer Vision and Pattern Recognition.
Kim, H., Handa, A., Benosman, R., Ieng, S., and Davison,
A. J. (2014). Simultaneous mosaicing and tracking
with an event camera. In British Machine Vision Con-
ference.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. CoRR, abs/1412.6980.
Lagorce, X., Orchard, G., Galluppi, F., Shi, B. E., and
Benosman, R. B. (2017). Hots: a hierarchy of event-
based time-surfaces for pattern recognition. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 39(7):1346–1359.
Lichtsteiner, P., Posch, C., and Delbruck, T. (2006). A 128 x
128 120db 30mw asynchronous vision sensor that re-
sponds to relative intensity change. In Solid-State Cir-
cuits Conference, 2006. ISSCC 2006. Digest of Tech-
nical Papers. IEEE International, pages 2060–2069.
IEEE.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft COCO: Common objects in context. In Eu-
ropean Conference on Computer Vision. Springer.
Lungu, I.-A., Corradi, F., and Delbr
¨
uck, T. (2017). Live
demonstration: Convolutional neural network driven
by dynamic vision sensor playing roshambo. In IEEE
International Symposium on Circuits and Systems (IS-
CAS), pages 1–1. IEEE.
Maqueda, A. I., Loquercio, A., Gallego, G., Garcıa, N.,
and Scaramuzza, D. (2018). Event-based vision meets
deep learning on steering prediction for self-driving
cars. In IEEE International Conference on Computer
Vision and Pattern Recognition, pages 5419–5427.
Mirza, M. and Osindero, S. (2014). Conditional generative
adversarial nets. arXiv preprint arXiv:1411.1784.
Mitrokhin, A., Fermuller, C., Parameshwara, C., and Aloi-
monos, Y. (2018). Event-based moving object detec-
tion and tracking. arXiv preprint arXiv:1803.04523.
Munda, G., Reinbacher, C., and Pock, T. (2018). Real-time
intensity-image reconstruction for event cameras us-
ing manifold regularisation. International Journal of
Computer Vision, 126(12):1381–1393.
Pini, S., Borghi, G., Vezzani, R., and Cucchiara, R. (2019).
Video synthesis from intensity and event frames. In
International Conference on Image Analysis and Pro-
cessing, pages 313–323. Springer.
Ramesh, B., Zhang, S., Lee, Z. W., Gao, Z., Orchard, G.,
and Xiang, C. (2018). Long-term object tracking with
a moving event camera. In British Machine Vision
Conference.
Rebecq, H., Gallego, G., and Scaramuzza, D. (2016). Emvs:
Event-based multi-view stereo. In British Machine Vi-
sion Conference.
Rebecq, H., Ranftl, R., Koltun, V., and Scaramuzza, D.
(2019). Events-to-video: Bringing modern computer
vision to event cameras. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 3857–3866.
Redmon, J. and Farhadi, A. (2018). YOLOv3:
An incremental improvement. arXiv preprint
arXiv:1804.02767.
Reinbacher, C., Graber, G., and Pock, T. (2016). Real-time
intensity-image reconstruction for event cameras us-
ing manifold regularisation. In British Machine Vision
Conference.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Rota Bul
`
o, S., Porzi, L., and Kontschieder, P. (2018).
In-place activated batchnorm for memory-optimized
training of dnns. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V.,
Radford, A., and Chen, X. (2016). Improved tech-
niques for training gans. In Neural Information Pro-
cessing Systems, pages 2234–2242.
Scheerlinck, C., Barnes, N., and Mahony, R. (2018).
Continuous-time intensity estimation using event
cameras. Asian Conf. Comput. Vis. (ACCV).
Uhrig, J., Schneider, N., Schneider, L., Franke, U., Brox,
T., and Geiger, A. (2017). Sparsity invariant cnns. In
International Conference on 3D Vision (3DV).
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Xingjian, S., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-
K., and Woo, W.-c. (2015). Convolutional lstm net-
work: A machine learning approach for precipitation
nowcasting. In Neural Information Processing Sys-
tems, pages 802–810.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In CVPR.
Zhou, Y., Gallego, G., Rebecq, H., Kneip, L., Li, H., and
Scaramuzza, D. (2018). Semi-dense 3d reconstruction
with a stereo event camera. In European Conference
on Computer Vision.
Zhu, A. Z., Thakur, D.,
¨
Ozaslan, T., Pfrommer, B., Kumar,
V., and Daniilidis, K. (2018). The multivehicle stereo
event camera dataset: An event camera dataset for 3d
perception. IEEE Robotics and Automation Letters,
3(3):2032–2039.
Learn to See by Events: Color Frame Synthesis from Event and RGB Cameras
47
