Bident Structure for Neural Network Model Protection
Hsiao-Ying Lin, Chengfang Fang and Jie Shi
Huawei International, Singapore
Keywords: Machine Learning Security, Deep Neural Networks, Learning Model Protection, Model Confidentiality.
Abstract: Deep neural networks are widely deployed in a variety of application areas to provide real-time inference
services, such as mobile phones, autonomous vehicles and industrial automation. Deploying trained models
in end-user devices rises high demands on protecting models against model stealing attacks. To tackle this
concern, applying cryptography algorithms and using trusted execution environments have been proposed.
However, both approaches cause significant overhead on inference time. With the support of trusted execution
environment, we propose bident-structure networks to protect the neural networks while maintaining
inference efficiency. Our main idea is inspired by the secret-sharing concept from cryptography community,
where we treat the neural network as the secret to be protected. We prove the feasibility of bident-structure
methods by empirical experiments on MNIST. Experimental results also demonstrate that efficiency overhead
can be reduced by compressing sub-networks running in trusted execution environments.
1 INTRODUCTION
Artificial neural networks based machine learning
techniques have achieved great advancements in
many tasks, such as image classification, language
model and speech recognition. To provide a faster
inference services, models are deployed in end-user
devices for many services or applications. For
instance, deep learning based object detection and
classification techniques have been deployed in
image-based advanced driver-assistance systems.
However, deploying models in devices brings
new challenge on model protection. It takes
considerable amount of time and effort to train a
learning model to its peak accuracy, especially for
collecting training data and sophisticated training
processes. It is important to protect those trained
model against model stealing attacks.
There are two types of model stealing attacks. The
first type attempts to learn the network parameters
and structure by probing the runtime environment in
order to obtain the ability of the train model. The
second type tries to construct an equivalent model by
adaptively querying the model (Tramér et al., 2016).
Here we address the first type of attacks.
Previous studies took cryptographic approaches
that applying secure computation for secure training
and inference of machine learning models while
keeping parameters in encrypted format (Chen et al.,
2018; Jiang et al., 2018; Juuti et al., 2019). Another
approach is to use trusted execution environments,
such as Inter SGX (Olga et al., 2016; Gu et al., 2018;
Tramér & Boneh, 2019), or TEE (Volos et al., 2018;
VanNostrand et al., 2019). Both approaches introduce
significant performance overhead.
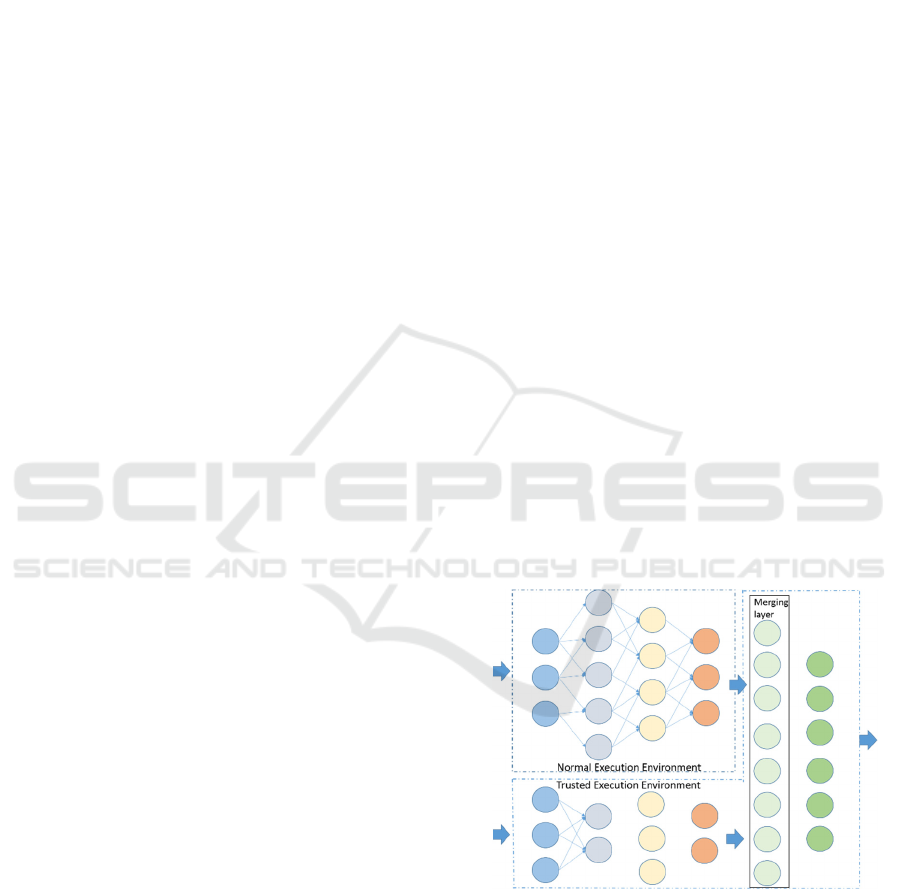
Figure 1: Bident structure based neural network.
We use a hybrid approach that combines the
secret-sharing concept from cryptography
community and trusted execution environments
supported by commercial hardware, where the model
is the secret to be protected. We propose the method
of using bident structure based neural networks,
bident networks in short, where inference can be
Lin, H., Fang, C. and Shi, J.
Bident Structure for Neural Network Model Protection.
DOI: 10.5220/0008923403770384
In Proceedings of the 6th International Conference on Information Systems Security and Privacy (ICISSP 2020), pages 377-384
ISBN: 978-989-758-399-5; ISSN: 2184-4356
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
377

executed along two sub-networks in two separated
environments with no intermediate interaction. As
long as one cannot obtain both parts of the model, one
is unable to reconstruct an effective model which has
the same ability as the original one. An abstract
network structure is illustrated in Figure 1. Each
circle is a neural and each edge is a data flow path.
The whole neural network consists of two sub-
networks and they are glued by a merge layer where
output from two sub-networks are merged. One part
of the network is deployed in untrusted environment
(also called normal execution environment.) Another
part of the network including the final output is
deployed in trusted execution environment.
To validate the feasibility of our proposed method,
we conduct experiments on MNIST datasets by
exploring several bident structure based neural
networks. Experimental results not only prove the
feasibility. They also show that the efficiency
overhead can be reduced by compressing the sub-
network in trusted execution environment while
keeping the same accuracy.
Our main contribution is providing a model
protection method by utilizing bident structures in
neural networks and leveraging trusted execution
environment while maintaining performance.
2 BACKGROUND
2.1 Deep Neural Network
For a classification service, at a high level, a deep
neural network model takes an input, transforms it
along the network layers of neurons and finally
outputs the predicted class. It requires a training
dataset and an initial deep neural network model to
generate such a model. For each neuron, the
computation is applying an activation function on the
weighted summation of input. An example is shown
in Figure 2. Two input a
1
and a
2
are summed up by
weights w
1
and w
2
on the corresponding edges and
then provided to activation function f to generate the
output. Generating a neural network model is called
training and using a trained model is call inference.
In this study, we focus on convolutional neural
networks.
Figure 2: Computation of a neuron.
2.2 Trusted Execution Environment
A trusted execution environment is isolated from an
untrusted execution environment. It is implemented
by hardware-software co-design. The isolated
environment guarantees integrity of the execution
codes, privacy of the execution processes, and data
confidentiality in secure memory. Available
providers include Intel SGX, ARM TrustZone and
Sanctum.
Operations in trusted execution environments are
usually slower than ones in untrusted execution
environment. Experimental results from (Tramér &
Boneh, 2019) show that neural network operations in
trusted execution environment is 50 times slower than
in untrusted execution environment. Interactions
between processes in two separated environment are
also costly in terms of performance. Secure memory
that can only be accessed from trusted execution
environment is usually limited. For instance, the
secure execution environment OP-TEE based on
ARM TrustZone allocates 7MB secure memory while
running neural networks requires much more memory
(VanNostrand et al., 2019).
3 RELATED WORK
Previous studies took cryptographic approaches or
used trusted execution environments.
Applying secure computation for secure training
and inference of neural network models keeps the
model in encrypted format (Chen et al., 2018; Jiang
et al., 2018; Juuti et al, 2019). Specifically, weights
of the model are encrypted and then inference is
performed in encrypted format. Those cryptographic
operations results in significant computation
overhead.
Another approach is to use trusted execution
environments. As described in previous section,
trusted execution environments have performance
constraints: less computation efficiency, limited
memory space, and latency introduced by interaction
between two environments.
To address the efficiency constraint, researchers
divide the inference computation into two parts and
outsource the part of matrix multiplications from
trusted execution environment to untrusted one
(Tramér & Boneh, 2019). Figure 3 illustrates the main
idea. During executing the neural network, for each
layer in the network, there is one matrix
multiplication. Matrices are masked in trusted
execution environment and then sent to untrusted
execution environment where matrix multiplication is
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
378
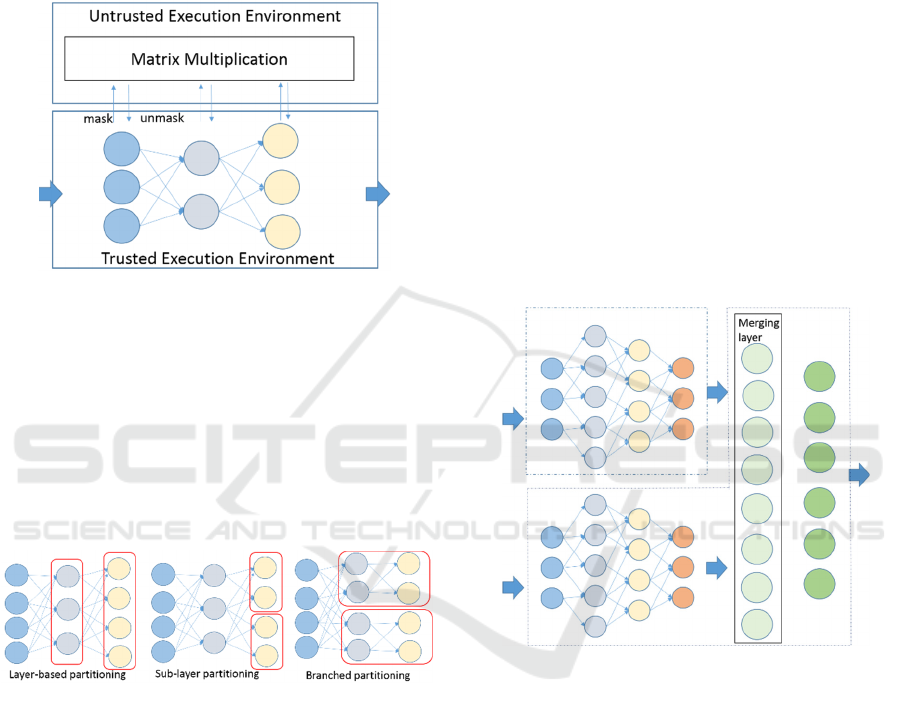
done. The result is sent back and unmasked in trusted
environment. This method reduced the cost of matrix
multiplication in trusted execution environment.
However, inference computation involves many
interaction between untrusted and trusted execution
environments. The interaction cost is linear in the
number of neurons in the network.
Figure 3: Outsource matrix multiplications.
To address the limited memory space constraint,
researchers partition the neural network into several
sub-networks and sequentially perform inference
computation for each sub-networks in trusted
execution environments (VanNostrand et al., 2019).
Figure 4 illustrates the proposed partitioning method.
The partition principle is that computation of each
partition can be completed in trusted execution
environment within the memory space limitation.
Figure 4: Partitioning types.
Above two methods address the model protection
issue after the neural network model is made. We take
another viewpoint to manage the model protection
need. With the need in mind, a sophisticatedly
designed neural network can be considered before the
training phase, not after. It makes our method
different from other similar approaches.
Bident network structures are not new in the areas
of applying machine learning. They are applied to
processing heterogeneous input for object detection
in autonomous vehicles (Chen et al. 2017). However,
it is the first time that it is used for protecting models.
4 BIDENT NETWORK
We assume that a trusted execution environment is
available in deployed devices. Our idea is to build the
model in a structure such that part of the model is
running in trusted execution environment. Analog to
secret sharing techniques in cryptography, the secret
(i.e. the model) is firstly transformed into another
format (i.e. bident network structure.) Later the
transformed format is split into pieces and each piece
is hold by a different entity. As long as over a certain
number of pieces are available, the secret can be
reconstructed back. Inspired by this concept, we
propose bident network structure for designing the
neural network. Figure 5 illustrates an example of
symmetric bident network structure where the
network consists of two sub-networks deployed in
two environments separately. Both sub-network takes
the same input and their output are merged by the
merging layer.
Figure 5: Symmetric bident network.
The generalized bident network structure takes
input for two sub-networks without any limitation on
how input are prepared. We focus on duplications
here where input to sub-networks are identical.
By putting a sub-network in trusted execution
environment, corresponding parameters are protected.
By putting another sub-network in untrusted
execution environment, computation cost is partially
offloaded from the trusted execution environment. By
the bident structure, sub-networks can be performed
in parallel, so the interaction between two
environments is massively reduced.
One may concern about the sub-network exposed
in untrusted execution environment, the feasibility of
the solution and the impact on the performance. We
investigate them in the following.
Bident Structure for Neural Network Model Protection
379
With the bident network structure, when the sub-
network in untrusted execution environment makes
major influence on the result, it reveals too much
information. To avoid this situation, we implement
the merging layer by operations that both input make
influence, such as multiplication, maximum and
average operations.
To prove the feasibility of bident network
structures, two issues need to be addressed. The first
one is the potential overfitting issue since the network
structure may be overkilled. We investigate this issue
by conducting experiments where networks are fine-
tuned.
The second issue is the offloading functionality.
That is whether the computation in trusted execution
environment can be reduced by the help of one in
untrusted execution environment. We conducted
experiments on asymmetric bident network to explore
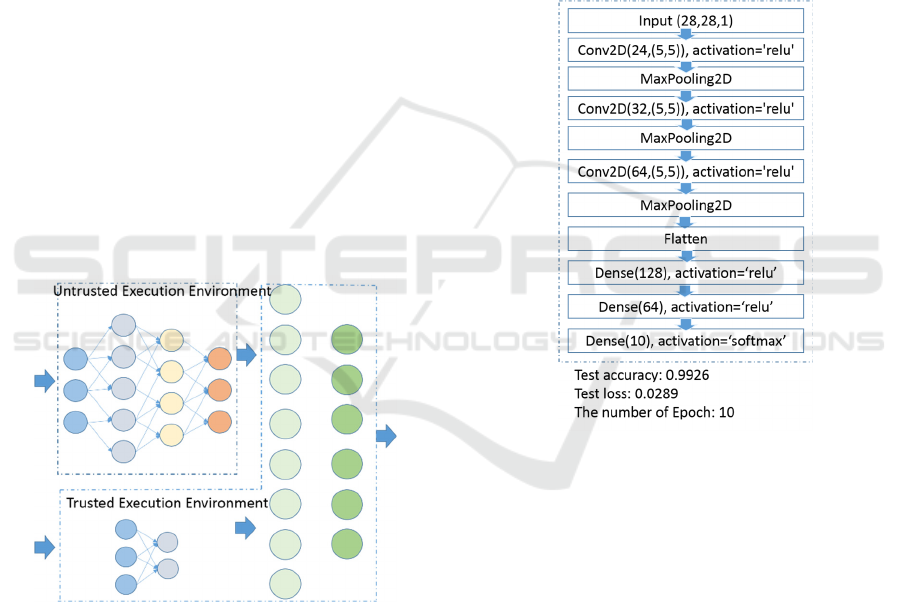
the opportunity. Figure 6 illustrates an example of
asymmetric bident network structure. Our
experiments are conducted to show that it is feasible
to find a bident network structure where the resulting
accuracy is above 99% and the sub-network in trusted
execution environment can be slightly reduced.
To observe the impact on performance, we
analyse experimental results of variant networks in
the next section.
Figure 6: Asymmetric bident network.
5 EMPIRICAL EVALUATION
To evaluate the feasibility and performance, we
conduct experiments on National Institute of
Standards and Technology (MNIST) dataset, a
handwritten classification dataset. Firstly, we train a
base model with at least 99% accuracy as a baseline
for the network configuration and the number of
epochs.
We then evaluate a symmetric bident network
structure with concatenation operation to test the
water. Taking one more step, we evaluate symmetric
bident network structures with other merging
operations, i.e. multiplication, maximum and average.
Finally, in order to see if a sub-network can be
reduced, we evaluate asymmetric bident networks.
5.1 Setup
Our experiment dataset is MNIST, where the training
and test datasets contain 60,000 and 10,000 samples
respectively. The training dataset is divided into two
subsets with 50,000 samples and 10,000 samples for
training and validation.
Figure 7: Base convolution neural network.
Each experiment has two major steps. The first
one is to set the batch size as 32, train the model with
30 epochs, and find the suitable number of epochs. A
suitable number of epochs is where the accuracy is
over 99% and there is no overfitting sign. Here we
consider the overfitting sign is that when the number
of epoch is increasing, accuracy of training dataset
gets better and one of validation dataset gets worse.
The second step is to train a model based on the
original training dataset of 60,000 samples with the
selected number of epochs and test on test dataset of
10,000 samples.
Over all experiments, the optimizer is the Adam
optimization algorithm and the loss function is
categorical cross entropy. We start from a basic
convolution neural network (CNN) shown in Figure
7. This neural network model is modified from
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
380
LeNet-5 (LeCun et al., 1998) by adding one more
pooling layer, replacing activation functions as
rectified linear unit (ReLU) and tuning detailed
parameters. The number of epochs is set to 10 since it
results in 99% accuracy without overfitting sign.
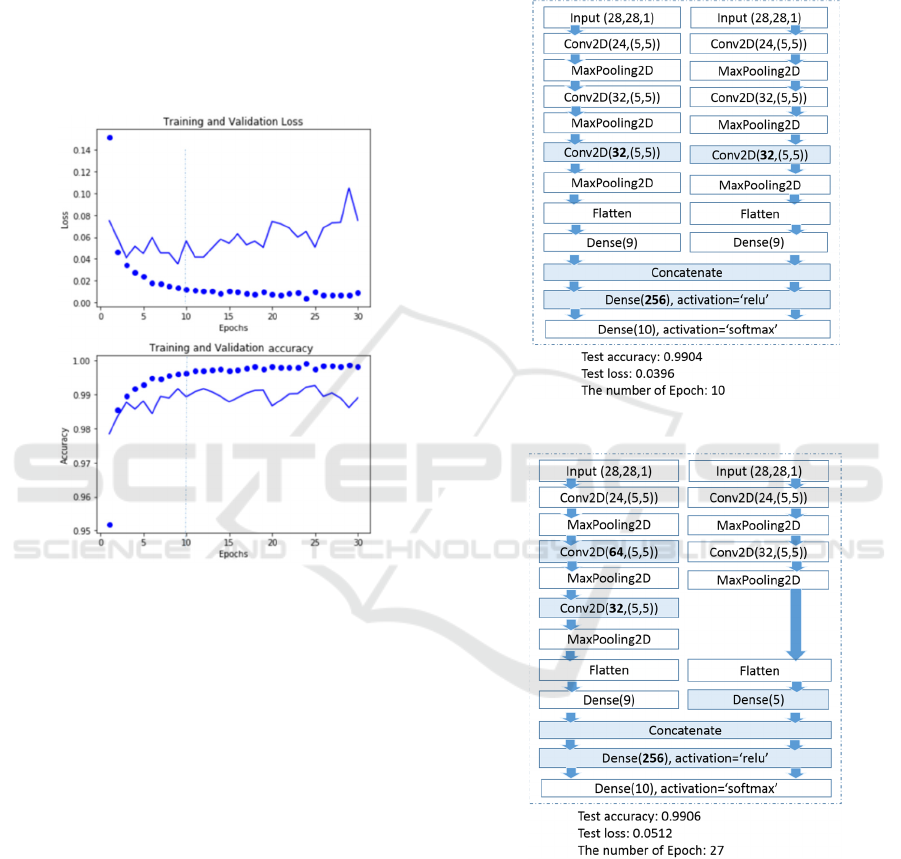
Figure 8 shows how the number of epochs is selected.
Dotted lines give the result of training and solid lines
give the result of validation. After 10 epochs,
validation loss and accuracy do not continue
improving as training loss and accuracy do. It shows
that more than 10 epochs may be overfitting.
Figure 8: Training process of base CNN.
5.2 Experiments
We consider four different implementations for the
merging layers. They are concatenation,
multiplication, maximum and average. For each of
them, we conduct a pair of experiments for symmetric
and asymmetric bident networks. Among all
networks in our experiments, activation functions are
all rectifiers except for the final dense layer which
uses softmax. For each experiment, we measure
accuracy, loss and the required number of epochs for
training.
The first pair of experiments use concatenation
operation for the merging layer. Experimental results
of symmetric and asymmetric networks are shown in
Figure 9 and Figure 10, respectively. The left sub-
network is in untrusted execution environment while
the right one is in trusted execution environment. The
colored boxes and numbers in bold font indicate
major differences from the base model. Those
differences are made in order to achieve 99% accura-
accuracy without overfitting sign.
There are several ways to mitigate overfitting,
such as reducing the network size, using weight
regularization and applying dropout technique. Here
we take the approach of reducing the network size by
using less layers and/or less neurons.
Figure 9: Symmetric bident network with concatenation.
Figure 10: Asymmetric network with concatenation.
We then implement the merging layer by using
multiplication. The results of symmetric and
asymmetric bident networks are shown in Figure 11
and Figure 12, respectively.
Similarly, we implement the merging layer by
using maximum and average operations for both
symmetric and asymmetric networks, shown in
Figure 13 and Figure 14, respectively.
Bident Structure for Neural Network Model Protection
381
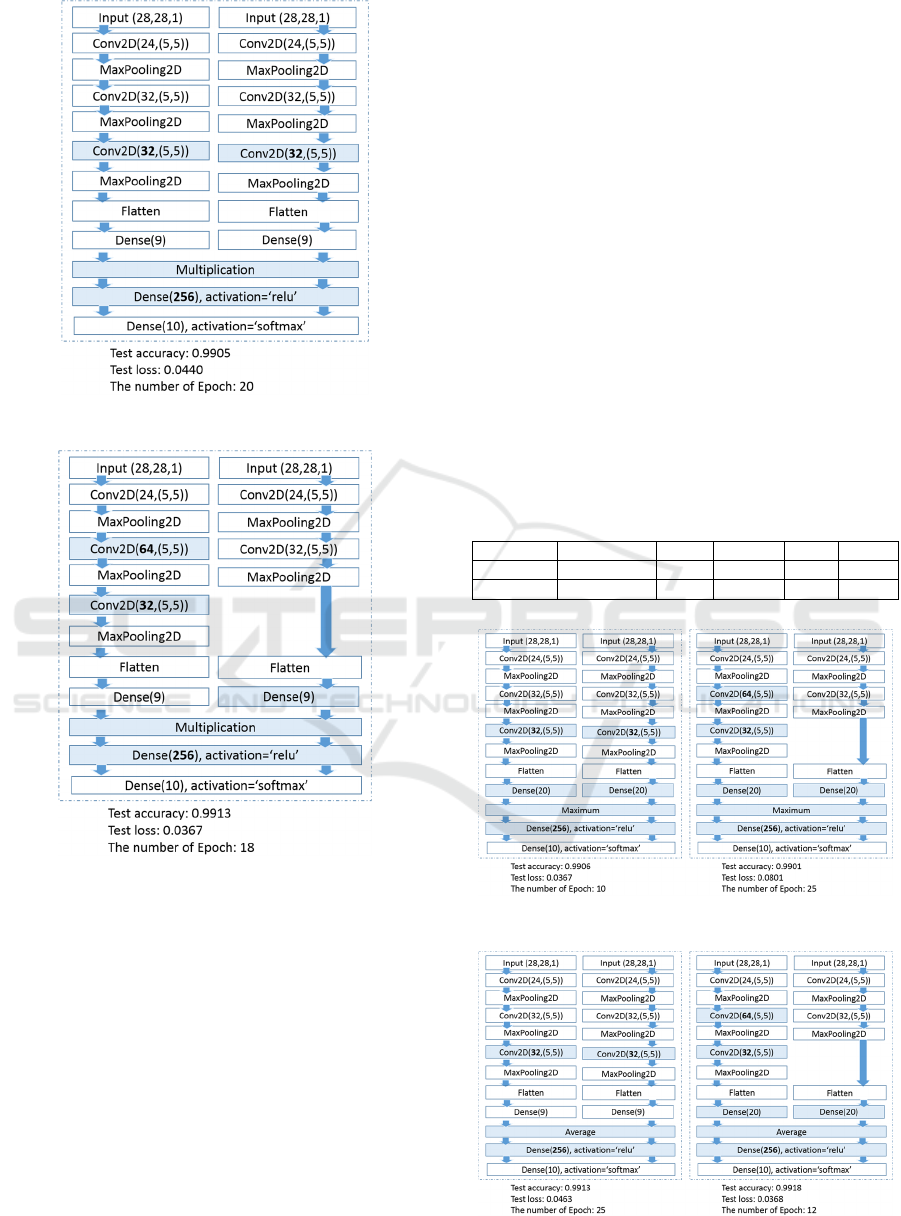
Figure 11: Symmetric bident network with multiplication.
Figure 12: Asymmetric bident network with multiplication.
Our approach of making asymmetric bident
networks is to reduce layers in trusted execution
environment as the asymmetric one with
concatenation. We tried to reduce more layers but the
resulting accuracy cannot fulfil our requirement.
There are other ways of forcing both sub-
networks jointly to decide the final result. For
instance, weights on edges from sub-networks to the
merging layer can be pre-configured significant
enough.
5.3 Summary
We summarize experimental results of epochs in
Table 1 where 99% accuracy is guaranteed.
The performance overhead of the training phase
can be observed by the number of epochs. Table 1
shows training cost when using bident networks. The
comparison between the base model and bident
networks present the training overhead. In most cases,
training overhead is significant. However, training is
usually performed offline, we consider the overhead
is acceptable in most scenarios.
The comparison between symmetric and
asymmetric bident networks gives no tendency on
which one having higher training overhead. Networks
with concatenation and maximum have higher
training cost in asymmetric structure. Yet networks
with multiplication and average have higher training
cost in symmetric structure.
The performance overhead of inference phase is
well-maintained by the number of layers in the
network.
Although the experiment scale is limited, results
still provide an initial positive evidence on the
feasibility.
Table 1: Required Epochs for Different Structures.
Base Conca
t
Multi Max Avg
Symmetric 10 10 20 10 25
Asymmetric N/A 27 18 25 12
Figure 13: Bident networks with maximum.
Figure 14: Bident networks with average.
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
382

6 DISCUSSION
From experimental results, we validate the feasibility
of our idea on bident network structure. For each
considered structure, the trained model can achieve at
least 99% accuracy. In addition, results of using
asymmetric network structures show that offloading
computation from trusted execution environment to
untrusted execution environment is doable.
However, the training overhead varies among
different operations. We evaluate the performance
overhead for the training phase and the inference
phase by the required number of epochs and the layers
in the model. We consider the overhead of the
training phase is more acceptable than one of the
inference phase. The required numbers of epochs
indeed are increased, so it takes more time to
accomplish the training processes. We do not change
the total numbers of layers among models in
experiments, so the real-time performance (the
inference phase) remains.
Bident network structures protect the model by
embedding it into two different environments. This
method does not prevent the query-based model
stealing attack. To fully protect the model, a
complementary protection is preferred, such as
limiting the query throughput or detecting query-
based attacks.
7 CONCLUSION
As trained models are crucial intelligent properties for
deep learning based applications, we propose the use
of bident network structure to protect model
confidentiality. By dividing the neural network into
two sub-networks and minimizing their intermediate
interaction, each sub-network is deployed in a
different environment. As long as one cannot obtain
parameters from both environments, one cannot
reconstruct the model. Experimental results of
difference bident network structures on MNIST
dataset show the feasibility with low performance
overhead of the inference phase.
We list some potential directions to explore more
related to this research.
To validate the feasibility of bident networks in
general, more experiments are required on
different datasets, different types of input data
(such as texts instead of images), different ways
of inputting data into sub-networks (such as
dividing instead of replication), and different
types of models (such as recurrent neural
networks instead of CNN.)
To quantify the impact on confidentiality, more
investigations are required to analyze the
information entropy on the sub-network.
In addition to trusted execution environment in
devices, bident network structures are potentially
applicable to machine learning-as-a-service cloud
with multi-server structures where each server
holds a sub-network. As an extension, bident
network structures can be expanded to trident-
network, quadruplet-network, and more.
REFERENCES
Florian Tramér, Fan Zhang, Ari Juels, Michael K. Reiter
and Thomas Ristenpart. 2016. Stealing Machine
Learning Models via Prediction APIs. In Proceedings
of the 25th USENIX Security Symposium, pp.601-608
Xuhui Chen, Jinlong Ji, Lixing Yu, Changqing Luo and Pan
Li. 2018. SecureNets: Secure Inference of Deep Neural
Networks on an Untrusted Cloud. In Proceedings of the
10th Asian Conference on Machine Learning 2018,
646-661
Xiaoqian Jiang, Miran Kim, Kristin E. Lauter, and Yongsoo
Song: 2018. Secure Outsourced Matrix Computation
and Application to Neural Networks. In Proceedings of
2018 ACM SIGSAC Conference on Computer and
Communications Security.1209-1222
Mika Juuti, Sebastian Szyller, Samuel Marchal, and N.
Asokan 2019. PRADA: Protecting Against DNN
Model Stealing Attacks. IEEE European Symposium on
Security and Privacy 2019
Olga Ohrimenko, Felix Schuster, Cédric Fournet, Aastha
Mehta, Sebastian Nowozin, Kapil Vaswani, Manuel
Costa. 2016. Oblivious Multi-Party Machine Learning
on Trusted Processors. The USENIX Security
Symposium 2016: 619-636
Zhongshu Gu, Hani Jamjoom, Dong Su, Heqing Huang,
Jialong Zhang, Tengfei Ma, Dimitrios Pendarakis, Ian
Molloy. 2018. Reaching Data Confidentiality and
Model Accountability on the CalTrain, arXiv preprint
arXiv:1812.03230
Stavros Volos, Kapil Vaswani, Rodrigo Bruno. 2018.
Graviton: Trusted Execution Environments on GPUs,
In Proceedings of the 13th USENIX Symposium on
Operating Systems Design and Implementation, 2018:
681-696
Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, and Tian
Xia.2017. Multi-view 3D Object Detection Network for
Autonomous Driving. In Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition 2017. 6526-6534
Florian Tramèr, Dan Boneh. 2019. Slalom: Fast, Verifiable
and Private Execution of Neural Networks in Trusted
Hardware. ICLR 2019
Bident Structure for Neural Network Model Protection
383

Peter M. VanNostrand, Ioannis Kyriazis, Michelle Cheng,
Tian Guo, Robert J. Walls. 2019. Confidential Deep
Learning: Executing Proprietary Models on Untrusted
Devices. arXiv preprint arXiv:1908.10730
Yann LeCun, Léon Bottou, Yoshua Bengio, Patrick Haffner.
1988. Gradient-based learning applied to document
recognition. In Proceedings of the IEEE 86 (11), 2278-
2324.
ICISSP 2020 - 6th International Conference on Information Systems Security and Privacy
384
