
Cohesion as a Tool for Maintaining the Functional Integrity of a
Multi-agent System
Mickael Bettinelli
a
, Damien Genthial
b
and Michel Occello
c
Institute of Engineering Univ. Grenoble Alpes, Grenoble INP, LCIS, 26000 Valence, France
Keywords:
Multiagent System, Functional Integrity, Cohesion.
Abstract:
In a context of open systems, agents can work with other unknown agents. They must therefore be able to
dynamically adapt their behavior to ensure that the system functions properly for all times. Bringing together
these open groups of agents and humanities and social sciences groups opens up new perspectives in how to
maintain the functional integrity of an artificial system. We propose then to draw inspiration from mechanisms
of cohesion resulting from HSS in order to improve the resilience of these systems.
1 INTRODUCTION
Today, a large majority of digital systems are highly
distributed and open involving heterogeneous entities
that interact and have advanced decision-making ca-
pabilities. Considering these artificial systems as so-
cieties of intelligent systems or objects opens up wide
perspectives through the analogy we can make with
social organizations. These systems are composed of
groups of agents who may need to work as a team
to achieve a common objective. These groups need
cohesion to maintain their agents united and achieve
their objectives. Cohesion is a concept that refers to
the mechanisms that connect a small or large set of
units. In computer science, the notion of cohesion
has so far been mainly limited to structural aspects
of group organization resulting in the maintenance
of connectivity in relationships between individuals
(swarm of robots (Manning et al., 2015), software
components (Rathee and Chhabra, 2018), networks
(Torrents and Ferraro, 2015)). Maintaining functional
integrity in a decentralized artificial system represents
the ability of a multi-agent system to achieve its ob-
jective (Pie¸tak et al., 2009). Different factors such
as the number of agents in the system or the num-
ber of inter-agent communications can make a system
inefficient or even fail, and therefore threaten its func-
tional integrity (Kisiel-Dorohinicki and Nawarecki,
1998),(Wallach, 1981).
a
https://orcid.org/0000-0002-0636-8311
b
https://orcid.org/0000-0002-1200-8371
c
https://orcid.org/0000-0001-8727-8010
To avoid failure, a multi-agent system must be
able to self-organize in order to maintain the unity of
its members and thus restore its performance. Main-
taining the integrity of these artificial societies is then
close to maintaining cohesion (Carron, 1982) in hu-
man societies and we can benefit from studies con-
ducted in the Humanities and Social Sciences (HSS).
The notion has been discussed very recently for mod-
eling in behavioural simulations within an multi-
agent system (MAS) (Adam et al., 2019). While
much work is being done on fault tolerance, few
use behavioural concepts related to group dynam-
ics. Some studies address the self-evaluation of an
agent in relation to members of its group through
the notion of social diagnosis (Kalech and Kaminka,
2003)(Rooy et al., 2016). They only approach the no-
tion of cohesion from the point of view of its individ-
ual evaluation. In this article, we propose an agent
model based on the cohesion mechanisms of HSS in
order to improve the functional integrity of MAS.
This document is organized as follows: part 2 in-
troduces the notion of group cohesion as seen in HSS
as well as a list of cohesion criteria that can be in-
tegrated into artificial systems to improve their re-
silience. Section 3 presents a case study and describes
how to integrate cohesion criteria into it. Section 4 de-
scribes the cohesive agent model we propose. Section
5 presents the experimental environment and speci-
fies the methods of evaluating the system on the study
case and the associated results. Finally, we conclude
in the part 6.
Bettinelli, M., Genthial, D. and Occello, M.
Cohesion as a Tool for Maintaining the Functional Integrity of a Multi-agent System.
DOI: 10.5220/0008920404450452
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 445-452
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
445

2 COHESION
2.1 Group Cohesion
2.1.1 Definition
Cohesion is defined by Festinger as the sum of the
forces that act on members in order to maintain the
group (Festinger, 1950). These forces depend on the
attraction and repulsion of several criteria such as the
prestige of the group, its members, or the tasks the
group is working on. Later, (Carron, 1982) adds the
notion of unity and describes cohesion as a dynamic
process that reflects the tendency of group members
to stay together and maintain unity in the pursuit of
common goals.
2.1.2 Cohesion Measurement
Mikalachki suggests that cohesion can be divided into
two components (Mikalachki, 1969) : task cohesion
and social cohesion. He argues that task cohesion oc-
curs when group members come together around the
task they are supposed to perform, while social cohe-
sion occurs when they come together around a social
function. Several models have been created to break
down group cohesion.
The first presents the two main categories sug-
gested by Mikalachki, task cohesion and social co-
hesion. The second figure 1, presented by (Carron,
1985), takes into account the individual’s attraction to
the group as well as its integration into the group. It
presents two dimensions of cohesion: the Group In-
tegration (GI) and the Individual Attraction To Group
(ATG). The first (GI) represents the way individuals
perceive the group (similarity, proximity, etc.), the
second (ATG) represents the satisfaction of the ex-
pectations that the group brings to individuals (inter-
actions with others, productivity, objectives, etc.). As
shown in figure 1, the model decomposes again these
two dimensions as Mikalachki did in order to split
them into social and task components. Therefore,
Carron proposes a multi-dimensional model where
the cohesion criteria are divided into the dimensions
GI-S, GI-T, ATG-S and ATG-T.
Heuzé and Fontayne tried to define a French-
speaking measure of cohesion (Heuzé and Fontayne,
2002). To this end, they examined the useful-
ness of the Group Environment Questionnaire (GEQ)
(Carron, 1985) for measuring cohesion in French
sports teams and the reliability of the Carron model.
Their study presents a questionnaire similar to the
GEQ called Questionnaire sur l’Ambiance du Groupe
(QAG). Thus, about thirty criteria were rewritten on
Figure 1: Proposed model by Carron (1958).
the QAG, and distributed over the four dimensions
seen above: GI-S, GI-T, ATG-S, ATG-T. Each of
them asserts a feeling about the group that the inter-
viewee may or may not agree with, for example, I
don’t like my team’s playing style, or I have some of
my best friends on the team.
In addition to the QAG items, other factors are
favourable to the creation of a team climate. Unlike
the QAG, they rather focus on the state of the group
itself than on the perceptions of individuals. Carless
and De Paola are conducting a study similar to Car-
ron’s regarding the cohesion measurement in which
they focus on work teams (Carless and De Paola,
2000). By seeking correlations between dimensions
of cohesion and characteristics of working groups,
they determine new criteria for assessing group co-
hesion. These are strongly correlated with the task
cohesion: team interactions, team effectiveness, pres-
ence of social assistance, presence of team spirit.
2.2 Artificial Cohesion
In order to transpose the cohesion seen in HSS to ar-
tificial systems, it is necessary to extract quantifiable
criteria from sociology to be able to reuse them in a
decision model based on cohesion. We extract crite-
ria from the QAG cohesion and add those of Carless
and Paola (Carless and De Paola, 2000) (table 1), we
retain a list of 18 items allowing the appearance of
cohesion within a group. To give some examples of
extracted criteria : Satisfaction of the team’s objective
(ATG-T), Presence of affinities in the group (ATG-S),
Cooperation in the team (GI-T), Interactions in the
team (GI-S), etc.. All these items represent a part of
the QAG and assess both the social and task dimen-
sions of the group. Each individual then builds a per-
ception of its group that allows him to have or not a
feeling of belonging to it. Although the QAG contains
31 items, this list contains only 18. The main reason
is that many of the QAG criteria are too social to be
integrated into an artificial system. To illustrate : I
don’t like to participate in my team’s extra-sport ac-
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
446
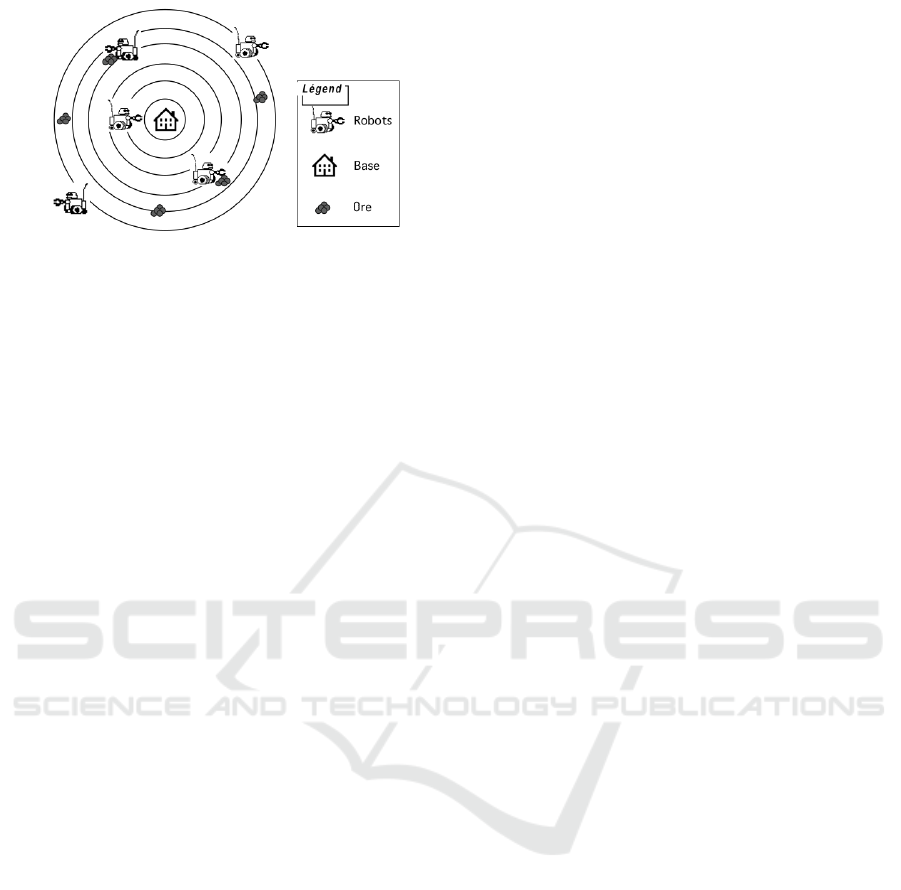
Figure 2: Mars exploration with agents.
tivities assumes that an agent can like or dislike a task
and that its group can organizes extra-group activities.
This kind of criterion requires a very cognitive agents’
architecture in order to be used.
3 INTEGRATE CRITERIA INTO
AN ARTIFICIAL SYSTEM
3.1 Case Study
Cohesion mechanisms must be evaluated on a case
study in which coalitions of agents are formed. The
chosen case study is about Mars exploration, pre-
sented in Ferber’s book (Ferber, 1995) (figure 2). The
objective is to collect mineral samples around a base
on Mars using robots, each representing an agent. In
Ferber’s example, there are three types of agents: 1.
detectors (which explore the planet in search of min-
erals), 2. drillers (which extract the ore from the
ground), 3. carriers (which bring the ore back to the
base).
By their nature, agents are interdependent, carri-
ers cannot transport ore if drillers have not extracted
it, and drillers cannot extract it if detectors have not
found it. Each agent is constrained in its communi-
cations by a maximum emission range. In this prac-
tical case, a team of valid agents is composed of at
least three members, one of each available type (de-
tector, driller, transporter). This case study therefore
requires agents to cooperate to achieve their personal
goals. They must then organize themselves into coali-
tions to be able to help each other.
3.2 Criteria Integration Into this Case
Study
Provided advantages by cohesion criteria :
• self-organization assistance: agents tend to self-
organize into coalition;
• increased productivity: the system finishes its
work faster by communicating less;
• increased resilience: the system better manages
stress periods without failing;
• failure detection: the system better detects block-
ing malfunctions during the execution period.
The Table 1 illustrates the benefits provided by each
cohesion criterion. Ease of implementation is taken
into account to help system designers to choose which
criteria to integrate first. Increasing resilience is not
really useful in this table since it is the more or less
direct consequence of each cohesion criterion.
Relatively few criteria are easily integrated into ar-
tificial systems. Indeed, most of them require a rela-
tively complex cognitive agent structure in order to
be implemented. For example, social assistance and
the cooperation of agents requires having a memory
on which they can reason to determine who should
be helped, how, when, etc., but also specific commu-
nication protocols to act effectively. Similarly, team
spirit is a complex element to put in place since it re-
quires agents to plan actions according to their inter-
nal states. On the contrary, some criteria are more eas-
ily integrated, such as the satisfaction of the agent’s
involvement in its individual objective, or the quality
of relationships through the agents’ interactions.
In order to evaluate cohesion criteria into an arti-
ficial system, we give priority to those that are eas-
ily implemented and cover a wide range of benefits
among those presented in the table 1 (allowing self-
organisation, increasing productivity and resilience,
and detecting failures). Finally, we retain all the crite-
ria that can be easily implemented: 1. satisfaction of
the member’s involvement in the objective, 2. interac-
tions in the team, 3. presence of affinities in the group,
4. satisfaction of the role played in the group, 5. sat-
isfaction of the role acquired in the group. We have
chosen to remove criteria #4 and #5 because both fo-
cus on the role that agents play and in our case study
each agent have a fix role. However, if the case study
uses multipurpose agents, criteria #4 and #5 would
have a more important effect and could play a role in
self-organization.
Finally, the cohesiveness criteria integrated into
our case study are: satisfaction of the member’s in-
volvement in the objective, interactions in the team as
well as presence of affinities in the group.
4 COHESIVE AGENT MODEL
In order to generalize the use of cohesion criteria, we
propose a cohesive agent model, which, based on the
Cohesion as a Tool for Maintaining the Functional Integrity of a Multi-agent System
447
Criteria
Increased resilience
Ease of implementation
Increased productivity
Self-organization assistance
Fault detection
Satisfaction of the member’s involvement in the
objective
X X X X
Interactions in the team X X X
Presence of team spirit X X
Effectiveness of the team X X X
Presence of affinities in the group X X
Satisfaction of the role played in the group X X X
Satisfaction with how the team performs its goal X X X
Satisfaction of the team’s objective X X
Ability of the individual to evolve within the
group
X X X
Importance of the social group to the individual X
Satisfaction with the role acquired in the group X X X
Cooperation in the team X X
Involvement of group members in the activity X X X
Appreciated atmosphere within the group X X
Presence of social assistance X X
Satisfaction of team priorities X X X
Preference for activities of other groups X X X
Compatibility of individual objectives with the
common objective
X X X
Table 1: Advantages provided to artificial systems by cohesion criteria.
above criteria, requires the following characteristics:
• a representation of the environment;
• a representation of itself;
• social skills;
• the ability to reason on its knowledge.
These properties can be found in several known cog-
nitive architectures such as Soar (Laird, 2012), ACT-
R (Anderson et al., 1997), CLARION (Sun et al.,
1998), LIDA (Franklin and Patterson, 2006), BDI
(Bratman, 1991), or FORR (Epstein, 1994).
These six architectures meet our needs for rep-
resenting the environment, itself and reasoning on
knowledge. Some, such as Soar, BDI, ACT-R and
CLARION, even make it possible to create social
agents. Many of these architectures (Soar, LIDA,
FORR) also have learning capabilities that are beyond
the scope of this study. ACT-R and CLARION archi-
tectures are very time-consuming to compute, which
makes them difficult to use on a large number of
agents and would avoid scaling. A simple architec-
ture based on the BDI model therefore seems to be the
most representative of our needs among those stud-
ied. For this reason, we reuse and modify it in order
to experiment with the effect of cohesion criteria in
artificial systems.
The changes to the classic BDI model ensure that
the agent can take into account the states of its ac-
quaintances to sort incoming messages as well as its
personal state to make a decision. Thus, the cohesive
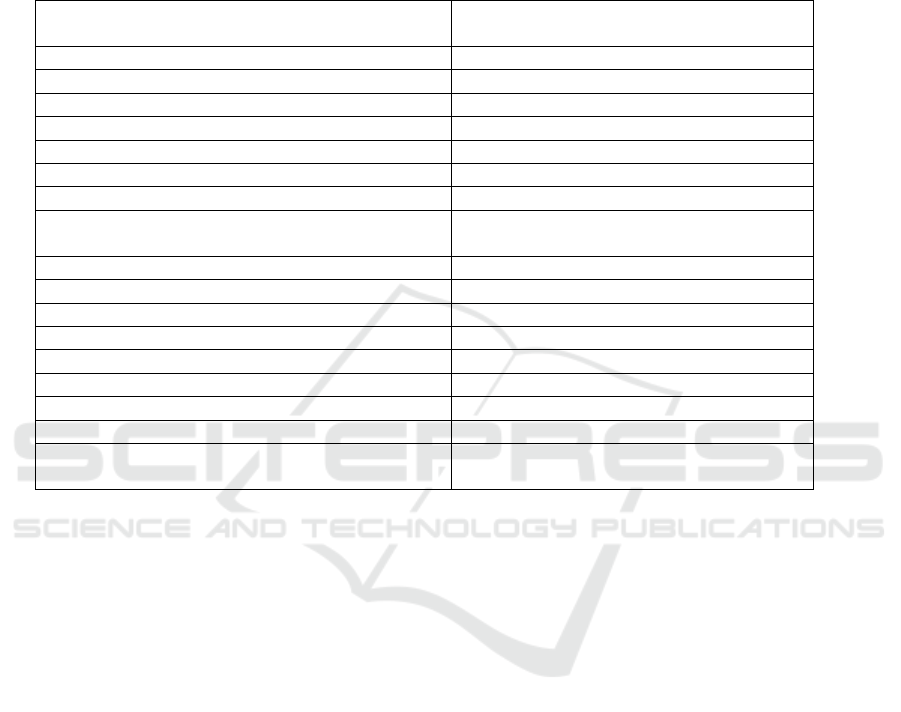
BDI model (figure 3) is modeled as the tuple:
A
cohesi f
= < Messages, S
M
, filter, Acquaintances,
Implication, Desires , plans, ctx, Intentions, S
I
>
This model uses the same reasoning cycle as a
classic BDI model with some modifications (high-
lighted on the figure 3).
Message Management (Messages, S
M
). The Mes-
sages module is a buffer in which all messages re-
ceived by the agent are stored. These messages are
stored before being processed by the agent. The mes-
sage selection function allows to choose which mes-
sage will be processed by the agent. In this case,
the messages are processed in their order of receipt
(FIFO) but it is possible to design a heuristic to adapt
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
448
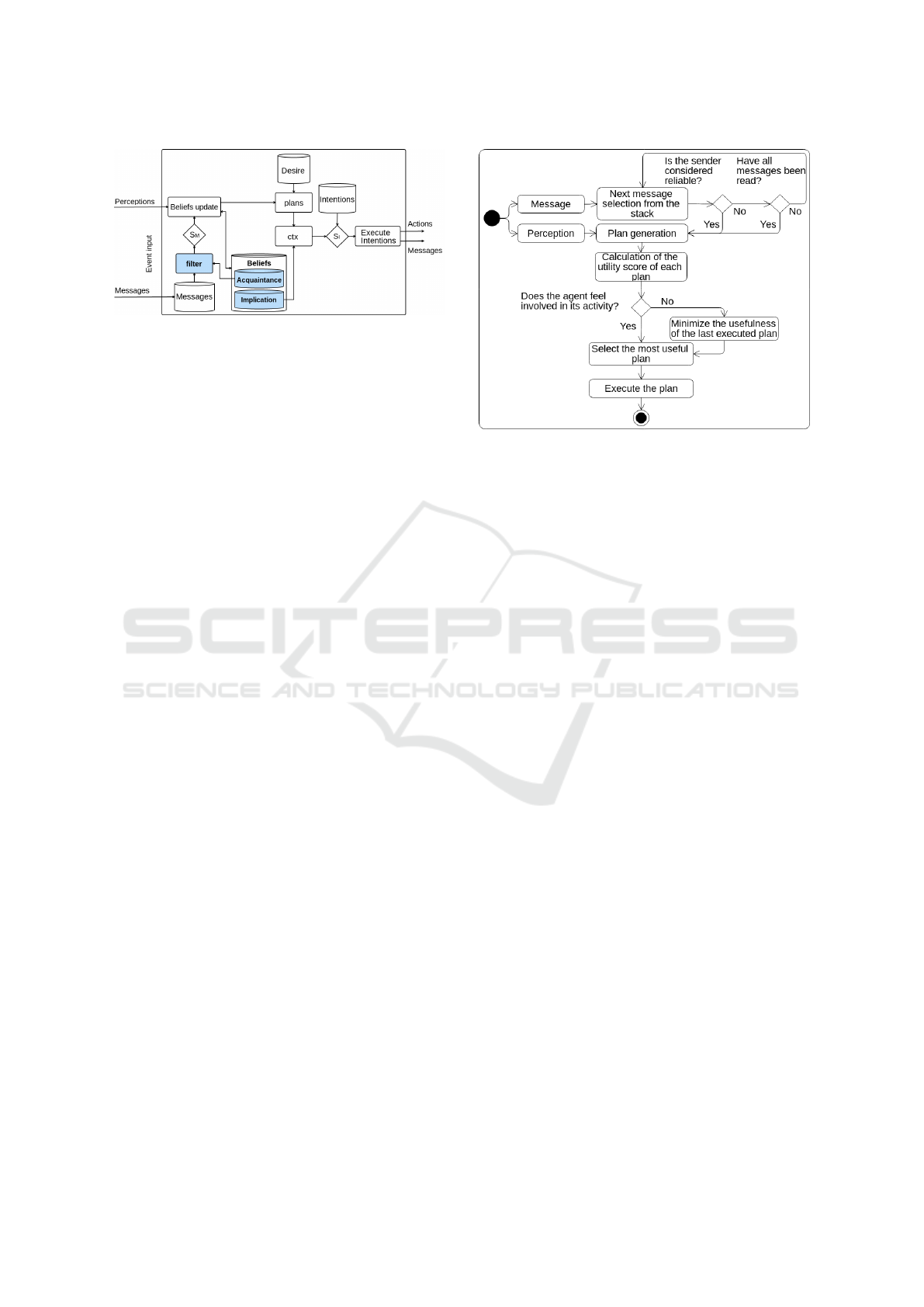
Figure 3: Reasoning cycle of the suggested modified BDI
model.
the agent’s behavior to the needs.
The Belief Update Function. The belief update
function provides the agent with new information
built by its perceptions or by messages received from
other agents. The updating of beliefs impacts the
plans module, which will allow the agent’s behaviour
to be modified according to his knowledge.
Implication, Acquaintances. The agent’s belief sta-
tus is enhanced by the addition of involvement and
bridging modules. The first is a self-assessment by
the agent of the quality of its involvement in its work.
Involvement allows cohesive agents to notice a lack
of activity and react accordingly via the ctx module.
This first mechanism provides agents with a means of
self-diagnosis of a dysfunction, which improves their
individual resilience and the system resilience.
The Acquaintances module associates a relational
score with each acquaintance, which makes it possi-
ble to estimate the quality of each relationship. Since
the Acquaintances module has an effect on the mes-
sage filter function, this score is an analogy of trust.
By quantifying the reliability of an agent’s acquain-
tance, this second mechanism allows an agent to de-
tect dysfunctional agents with which it is in contact.
The detection of these agents then allows the system
to isolate them and thus improve its resilience.
The Filter Function. The filter function is used to
filter messages in relation to the agent’s connection
module. Relational scores of acquaintances are com-
pared to a threshold used to determine whether a re-
lationship is bad enough or not in order to ignore the
sender’s messages. Therefore the filter function plays
an important role in the recognition of dysfunctional
agents and therefore in maintaining the functional in-
tegrity of the system agents.
Desires, Intentions. Desires are the agent’s motiva-
tions. They represent objectives or situations that the
agent would like to see accomplished. Intentions rep-
resent what the agent wants to do. Unlike desires,
agents check the feasibility of intentions. Intentions
are achievable, some of which can already be started.
Figure 4: Activity diagram of a cohesive agent.
Plan Generation (Plans, ctx). In order to act, agents
generate several plans linked to their desires. The
context function prioritizes plans according to the sit-
uation by assessing their usefulness and selects only
those that are applicable. At the end of this step, the
agent has an overview of the achievable plans and
their usefulness.
Intentions Management (S
I
, Execute Intentions).
At this level, all feasible plans are selected. The se-
lection of the intention will therefore make it possible
to keep only one plan and choose an action to exe-
cute. The selected plan is the one with the highest
utility score.
To illustrate the behaviour of one of the three types
of agents, the figure 4 shows the activity diagram of
a drilling agent. This diagram represents the mech-
anisms for involvement and evaluation of acquain-
tances explained above. The first cohesion mecha-
nism is involved in the selection of the message to
socially isolate agents who do not do their work prop-
erly. The second, on the choice of a plan, allows the
agent to change its behaviour in case of dissatisfaction
with the work previously done. These two comple-
mentary mechanisms both contribute to improving the
resilience of the system by making it possible to self-
diagnose a malfunction or by isolating agents from
the system that have a failure. We will show in the
section 5 the effect of these mechanisms on the case
study.
Cohesion as a Tool for Maintaining the Functional Integrity of a Multi-agent System
449
5 SYSTEM EVALUATION
5.1 Experimentation
The experiment is built on the MASH software (Ja-
mont and Occello, 2015). MASH (Multiagent Soft-
ware / Hardware simulator) is a tool for simulating
and executing multi-agent embedded systems. Agents
are implemented in Java and are executed by this sim-
ulator. We use MASH to reproduce the case study and
test different solutions built from configuration files,
themselves generated pseudo-randomly using Python
scripts. Agents work with the cohesive BDI model
explained in the previous section. As seen, the rea-
soning cycles between the classical BDI model as we
introduced it and the cohesive BDI model are very
similar. This similarity allows us to compare the ef-
fectiveness of the two models and see what benefits
cohesive agents can bring to the system.
In the following sections, we will assess the re-
silience of the cohesive system to see if the cohesion
mechanisms have resulted in an improvement in its
resilience. We will also compare the performance of
these systems to see if the addition of these mecha-
nisms changes their effectiveness.
5.2 Insertion of Faults
Failures are inserted in some agents of our simulated
systems. The objective is to see the effects of these
dysfunctions on these systems composed either of co-
hesive agents (implementing cohesion mechanisms)
or of conventional agents (without cohesion mecha-
nisms). The effect of these failures on each system is
then compared to see the benefits that cohesive agent
mechanisms can provide.
5.2.1 GPS Malfunction
In this scenario, agents continue to behave normally
and try to get the ore drilled by the drilling agents
to the base. Carriers have a faulty GPS that prevents
them from time to time from moving to the desired
position. The self-assessment mechanism of their in-
volvement is then useful to correct their behaviour.
The figure 5 compares the duration of the exper-
iment (in seconds) between a system composed of
classical agents (classical system) and a system com-
posed of cohesive agents (cohesive system) with dif-
ferent numbers of ores. Naturally, the more minerals
there are in the environment, the longer it takes for
agents to pick them up. Similarly, it is natural that
the two types of agents in the systems evaluated are
Figure 5: Duration of the experience depending on the type
of agent and the number of ores in the environment.
not quite as fast as each other. It is therefore inter-
esting to note that the gap between the two curves
is not constant but is gradually widening. This dif-
ference is explained by the difference in reactivity of
cohesive agents compared to conventional agents. In-
deed, as explained in the previous sections, cohesive
agents integrate an involvement mechanism that al-
lows them to self-assess their activity. Thus, when a
transport agent goes to the wrong coordinates, it is un-
able to recover the ore from the driller who contacted
it. Unable to fulfil its role, the agent’s involvement
decreases to a certain level which leads it to search a
new task. A conventional transport agent without this
type of mechanism goes to the wrong coordinates and
waits a long time for the driller to give it the ore. Fi-
nally, the transport agent is unblocked through a reset
mechanism that allows the blocked agents to return to
the base to continue their work. In short, in this sce-
nario the cohesive agent system is more reactive to er-
rors, agents recover more quickly and dynamically by
estimating their involvement in their activity through
a ratio between inactivity time and working time. On
the contrary, the conventional agent system is not very
reactive to failures, which can be seen by a more rapid
evolution of the duration of the experiments.
5.2.2 Propagation of False Information
In this scenario, the detector is no longer able to dis-
tinguish between empty and solid ores. When it de-
tects the position of an ore, it moves towards it and
saves it’s position. Then, it informs the driller of its
position to recover it. A properly functioning detector
updates its knowledge of minerals around itself. On
the contrary, a defective detector agent is no longer
able to distinguish empty ores from others. For ex-
ample, it is asking for help from drillers to extract
ore from sites where there is no ore left. Therefore,
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
450
the traditional system cannot maintain its functional
integrity since the defective agent constantly calls its
acquaintances who try to help without ever question-
ing its requests. In short, the system falls into an end-
less loop and is unable to detect the end of the work.
In this case, the failure is large enough to completely
block the system so it is considered as a failure. The
message selection mechanism then comes into play
by allowing cohesive agents to maintain the system’s
operation. Indeed, in the case of a system composed
of cohesive agents, the agents isolate the defective in-
dividual thanks to a confidence score held for each of
their acquaintance. When an agent is defective and its
behaviour is counterproductive to its peers, its rela-
tionships decrease its trust score. At a certain thresh-
old, agents stop taking into account messages that the
defective agent send. The cohesive system can there-
fore correctly estimate the progress of the work and
maintain its functional integrity. It is then more re-
silient than the traditional system to failures of this
type.
In this scenario, unlike the previous one, the node
of the distributed system does not isolate itself, it is
excluded by the system because of its deviant behav-
ior. Generalizing, this type of mechanism would be
useful in the case of an attack on the system. An
externally controlled agent attempting to change the
expected behaviour of the system would be automat-
ically removed by the system, ensuring that the func-
tional integrity of the system is maintained.
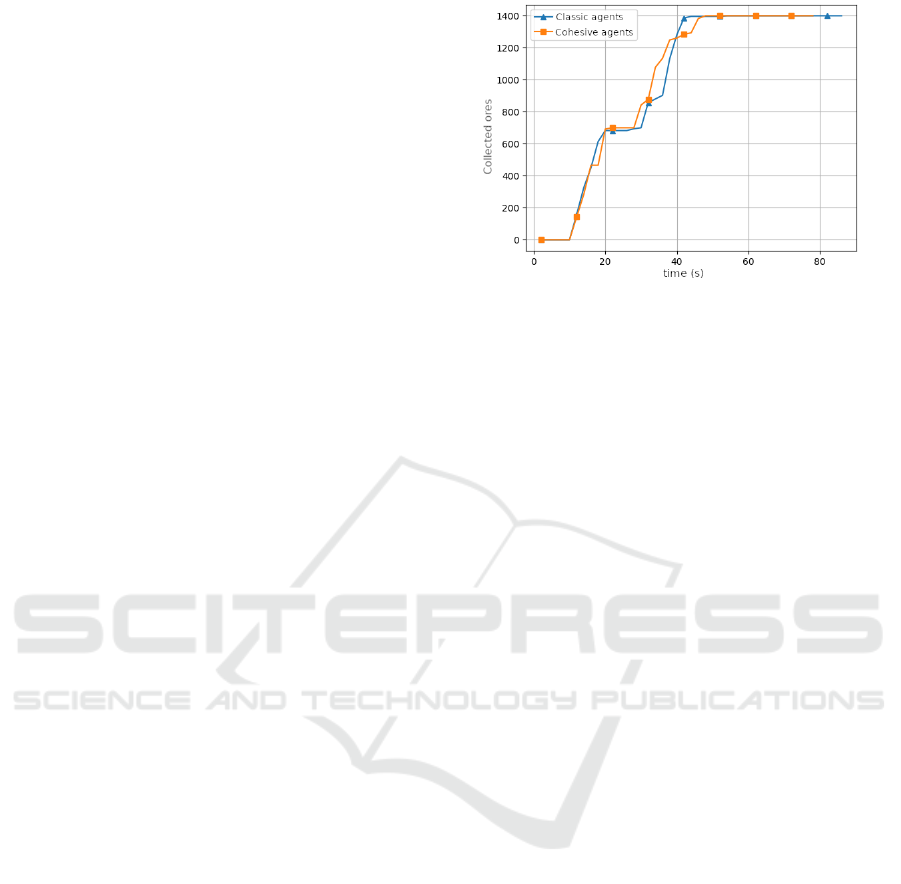
5.3 Comparison of System Efficiency
In order to compare the efficiency of systems, we
compare the rate of ore recovery, the duration of ex-
periments and the communications load. The figure
6 shows that cohesive agents have a very similar ore
collection rate to conventional agents. While the min-
eral collection curve of conventional agents marks 2
large steps (both minerals are collected very quickly
when found), cohesive agents tend to collect them in
several stages. This is due to the configuration of
cohesive agents that tend to change activity quickly
when they are not working (when drillers are wait-
ing for transporters, for example). Agents who have
been inactive for too long return to the base and lose
time in achieving the overall objective. However, the
graph also shows that the execution of experiments
with cohesive agents seems shorter than with con-
ventional agents. Indeed, experiments composed of
cohesive agents last an average of 67 seconds com-
pared to 80 seconds with conventional agents. Cohe-
sive agents reorganize more quickly when detectors
no longer find minerals to drill and agents return to
Figure 6: Ores reported as a function of time by agent type
with an implication threshold of 0.6 for cohesive agents.
the base more quickly than in systems composed of
conventional agents.
In the same way as the rate of ore recovery, the
number of messages transmitted in the system is al-
most identical for both types of agents. However, co-
hesive agents send 2.8% more messages than classi-
cal agents, which may be explained by the fact that
they take a little longer to collect the ore while having
shorter overall experience execution times.
Finally, these experiments show that the cohesion
mechanism does not improve the efficiency of the sys-
tem, but that the cohesive system shows better re-
silience and failure resistance than the conventional
system in the scenarios studied, without introducing
any significant additional cost into its operation.
6 CONCLUSION
We presented how group cohesion mechanisms can
guide a new approach to agent design in order to
maintain the functional integrity of a MAS. These
mechanisms were evaluated using a case study and
compared to more conventional designed agents. As
a first conclusion, we have seen that the integration
of cohesion mechanisms into artificial systems has in-
creased their resilience. We have not noted any degra-
dation in the efficiency of the system in mineral col-
lection or in the number of communications. In ad-
dition, the reactivity of the cohesive system is better
than the reactivity of the conventional system, which
reduces the average time of the experiments. In con-
clusion, cohesive agents have the ability to maintain
the functional integrity of their system while limiting
the negative impact of their behaviour compared to
conventional agents.
Although increasing resilience is a relevant ben-
efit, few cohesion criteria have been integrated and
Cohesion as a Tool for Maintaining the Functional Integrity of a Multi-agent System
451

evaluated here. For future research, it would be inter-
esting to try to integrate new cohesion criteria in dif-
ferent and more advanced cases to see, for example,
whether cohesion mechanisms can improve produc-
tivity or whether they can generate (or improve) the
self-organization of a system of multipurpose agents.
This model is currently being integrated into a de-
cision support system for the Circular project. This
project focuses on developing the necessary technolo-
gies and conditions to make new circular industrial
systems able to transform post-used products into new
products. Post-used components are avatarized as
agents. These cohesion criteria can be integrated into
the Soar architecture and used by the agents to form
groups that represent the products to make.
ACKNOWLEDGEMENTS
This research is supported by the French National Re-
search Agency under the "Investissements d’avenir”
program (ANR-15-IDEX-02) through the Cross Dis-
ciplinary Program CIRCULAR.
REFERENCES
Adam, C., Garbay, C., and Dugdale, J. (2019). Multi-factor
model and simulation of social cohesion and its effect
on evacuation. In Proceedings of the 52nd Hawaii
International Conference on System Sciences, pages
667–677.
Anderson, J. R., Matessa, M., and Christian Lebiere
(1997). ACT-R: A Theory of Higher Level Cognition.
Human-Computer Interaction, 12:439–462.
Bratman, M. E. (1991). Intention, Plans, and Practical Rea-
son. The Philosophical Review, 100(2):277–284.
Carless, S. A. and De Paola, C. (2000). The measurement
of cohesion in work teams. Small group research,
31(1):71–88.
Carron, A. V. (1982). Cohesiveness in Sport Groups: Inter-
pretations and Considerations. Journal of Sport Psy-
chology, 4:123–138.
Carron, A. V. (1985). The Development of an Instrument
to Assess Cohesion in Sport Teams : The Group Envi-
ronment Questionnaire. Journal of Sport Psychology,
7:244–266.
Epstein, S. L. (1994). For the Right Reasons: The FORR
Architecture for Learning in a Skill Domain. Cogni-
tive Science, 18(3):479–511.
Ferber, J. (1995). Les SMA. Informatique et intelligence
artificielle. InterEditions.
Festinger, L. (1950). Informal social communication. Psy-
chological Review, 57(5):271–282.
Franklin, S. and Patterson, F. (2006). The LIDA architec-
ture: Adding new modes of learning to an intelligent,
autonomous, software agent. 703:764–1004.
Heuzé, J.-P. and Fontayne, P. (2002). Questionnaire sur
l’Ambiance du Groupe: A French Language In-
strument for Measuring Group Cohesion. Human
Kinetics Publishers, Journal of Sport & Exercise
Psychology(24):42–67.
Jamont, J.-P. and Occello, M. (2015). Meeting the chal-
lenges of decentralised embedded applications using
multi-agent systems. International Journal of Agent-
Oriented Software Engineering, 5(1):22–68.
Kalech, M. and Kaminka, G. A. (2003). On the design
of social diagnosis algorithms for multi-agent teams.
In Intl. Joint Conference on Artificial Intelligence (IJ-
CAI), pages 370–375.
Kisiel-Dorohinicki, M. and Nawarecki, E. (1998). Func-
tional Integrity of MAS through the Dynamics of the
Agents’ Population. pages 405–406.
Laird, J. E. (2012). The Soar Cognitive Architecture. MIT
Press.
Manning, M. D., Harriott, C. E., Hayes, S. T., Adams,
J. A., and Seiffert, A. E. (2015). Heuristic evalua-
tion of swarm metrics’ effectiveness. In Proceedings
of the tenth annual ACM/IEEE international confer-
ence on human-robot interaction extended abstracts,
pages 17–18. ACM.
Mikalachki, A. (1969). Group cohesion reconsidered; a
study of blue collar work groups. School of Business
Administration, University of Western Ontario.
Pie¸tak, K., Wo
´
s, A., Byrski, A., and Kisiel-dorohinicki, M.
(2009). Functional Integrity of Multi-agent Computa-
tional System Supported by Component-Based Imple-
mentation. In Proc. of the Intl. Conf. on Industrial Ap-
plications of Holonic and Multi-Agent Systems, pages
82–91. Springer.
Rathee, A. and Chhabra, J. K. (2018). Improving cohe-
sion of a software system by performing usage pat-
tern based clustering. Procedia Computer Science,
125:740–746.
Rooy, D. V., Wood, I., and Tran, E. (2016). Modelling the
Emergence of Shared Attitudes from Group Dynamics
Using an Agent-Based Model of Social Comparison
Theory. Systems Research and Behavioral Science,
33(1):188–204.
Sun, R., Merrill, E., and Peterson, T. (1998). A Bottom-Up
Model of Skill Learning. In Proc. of 20th Cognitive
Science Society Conference, pages 1037–1042.
Torrents, J. and Ferraro, F. (2015). Structural cohesion: vi-
sualization and heuristics for fast computation. Jour-
nal of Social Structure, 16:1–35.
Wallach, Y. (1981). Alternating Sequential/Parallel Pro-
cessing Fundamental and Examples. IEEE Transac-
tions on Power Apparatus and Systems, (11):4397–
4401.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
452
