
VMRFANet: View-specific Multi-Receptive Field Attention Network for
Person Re-identification
Honglong Cai, Yuedong Fang, Zhiguan Wang, Tingchun Yeh and Jinxing Cheng
Suning Commerce R&D Center, U.S.A.
Keywords:
Person Re-identification, Attention, View Specific, Data Augmentation
Abstract:
Person re-identification (re-ID) aims to retrieve the same person across different cameras. In practice, it still
remains a challenging task due to background clutter, variations on body poses and view conditions, inaccurate
bounding box detection, etc. To tackle these issues, in this paper, we propose a novel multi-receptive field
attention (MRFA) module that utilizes filters of various sizes to help network focusing on informative pixels.
Besides, we present a view-specific mechanism that guides attention module to handle the variation of view
conditions. Moreover, we introduce a Gaussian horizontal random cropping/padding method which further
improves the robustness of our proposed network. Comprehensive experiments demonstrate the effectiveness
of each component. Our method achieves 95.5% / 88.1% in rank-1 / mAP on Market-1501, 88.9% / 80.0%
on DukeMTMC-reID, 81.1% / 78.8% on CUHK03 labeled dataset and 78.9% / 75.3% on CUHK03 detected
dataset, outperforming current state-of-the-art methods.
1 INTRODUCTION
Image-based person re-identification (re-ID) aims to
search people from a large number of bounding boxes
that have been detected across different cameras. Al-
though extensive amounts of efforts and progress have
been made in the past few years, person re-ID remains
a challenging task in computer vision. The obstacles
mainly come from the low resolution of images, back-
ground clutter, variations of person poses, etc.
Nowadays, the extracted deep features of pedes-
trian bounding boxes through a convolutional neural
network(CNN) is demonstrated to be more discrim-
inative and robust. However, most of the existing
methods only learn global features from whole hu-
man body images such that some local discriminative
information of specific parts may be ignored. To ad-
dress this issue, some recent works (Sun et al., 2018;
Wang et al., 2018b; Zhang et al., 2017) archived state-
of-the-art performance by dividing the extracted hu-
man image feature map into horizontal stripes and ag-
gregating local representations from these fixed parts.
Nevertheless, drawbacks of these part-based models
are still obvious: 1) Feature units within each local
feature map are treated equally by applying global
average/maximum pooling to get refined feature rep-
resentation. Thus the resulting models cannot fo-
cus more on discriminative local regions. And 2)
Pre-defined feature map partition strategies are likely
to suffer from misalignment issues. For example,
the performance of methods adopting equal partition
strategies (e.g. (Sun et al., 2018)) heavily depends
on the quality and robustness of pedestrian bound-
ing box detection, which itself is a challenging task.
Other strategies such as partition based on human
pose (e.g. (Yang et al., 2019)) often introduce side
models trained on different datasets. In that case, do-
main bias may come into play.
Moreover, to our best knowledge, none of these
methods have made efforts to manage view-specific
bias. That is, the variation of view conditions from
different cameras can be dramatic. Thus the extracted
features are likely to be biased in a way that intra-
class features of images from different views will be
pushed apart, and inter-class ones from the same view
will be pulled closer. To better handle these problems,
adopting an attention mechanism is an intuitive and
effective choice. As human vision only focuses on
selective parts instead of processing the whole field
of view at once, attention mechanism aims to detect
informative pixels within an image. It can help to ex-
tract features that better represent the regions of inter-
est while suppressing the non-target regions. Mean-
while, it can be trained along with the feature extrac-
tor in an end-to-end manner.
In this work, we explore the application of atten-
Cai, H., Fang, Y., Wang, Z., Yeh, T. and Cheng, J.
VMRFANet: View-specific Multi-Receptive Field Attention Network for Person Re-identification.
DOI: 10.5220/0008917004130420
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 413-420
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
413

tion mechanisms on the person re-identification prob-
lem. Particularly, the contributions of this paper can
be summarized as follow:
• We investigate the idea of combining spatial- and
channel-wise attention in a single module with
various sized receptive filters, and then mount the
module to a popular strip-based re-ID baseline
(Sun et al., 2018) in a parallel way. We believe
this is a more general form of attention module
comparing to the ones in many existing structures
that try to learn spatial- and channel-wise atten-
tion separately.
• We explore the potential of using attention mod-
ule to inject prior information into feature extrac-
tor. To be specific, we utilize the camera ID tag to
guide our attention module learning a view spe-
cific feature mask that further improves the re-ID
performance.
• We propose a novel horizontal data augmentation
technique against the misalignment risk, which is
a well-known shortcoming of strip-based models.
2 RELATED WORK
Strip-based Models: Recently, strip-based models
have been proven to be effective in person re-ID.
Part-based Convolutional Baseline (PCB) (Sun et al.,
2018) equally slices the final feature map into hor-
izontal strips. After refining part pooling, the ex-
tracted local features are jointly trained with classi-
fication losses and have been concatenated as the fi-
nal feature. Lately, (Wang et al., 2018b) proposed a
multi-branch network to combine global and partial
features at different granularities. With the combina-
tion of classification and triplet losses, it pushed the
re-ID performances to a new level compared with pre-
vious state-of-the-art methods. Due to the effective-
ness and simplicity, we adopted a modified version of
PCB structure as the baseline in this work.
Attention Mechanism in Re-ID: Another challenge
in person re-ID is imperfect bounding-box detection.
To address this issue, the attention mechanism is a
natural choice for aiding the network to learn where
to “look” at. There are a few attempts in the lit-
erature that apply attention mechanisms for solving
re-ID task (Cai et al., 2019; Yang et al., 2019; Li
et al., 2018; Chang et al., 2018). For example, (Cai
et al., 2019) utilized body masks to guide the train-
ing of attention module. (Yang et al., 2019) proposed
an end-to-end trainable framework composed of local
and fusion attention modules that can incorporate im-
age partition using human key-points estimation. Our
proposed MRFA module is designed to address the
imperfect detection issue mentioned above. Mean-
while, unlike (Li et al., 2018) and a few other existing
attention-based methods, MRFA tries to preserve the
cross-correlation between spatial- and channel-wise
attention.
Metric Learning: Metric learning projects images to
a vector space with fixed dimensions and defines a
metric to compute distances between embedded fea-
tures. one direction is to study the distance function
explicitly. A representative and illuminating example
is (Yu et al., 2018): to tackle the unsupervised re-ID
problem, they proposed a deep framework consisting
of a CNN feature extractor and an asymmetric metric
layer such that the feature from extractor will be trans-
formed specifically according to the view to form the
final feature in Euclidean space. Like many other re-
ID methods, we also incorporate the triplet loss in this
work to enhance the feature representability. Besides,
we also investigate the usage of attention module act-
ing like the asymmetric metric layer to learn a view-
specific attention map.
3 THE PROPOSED METHOD
In this section, we propose a novel attention module
as well as a framework to train view specific feature
enhancement/attenuation using the attention mecha-
nism. A data augmentation method to improve the
robustness of strip-based models has also been pre-
sented.
3.1 Overall Architecture
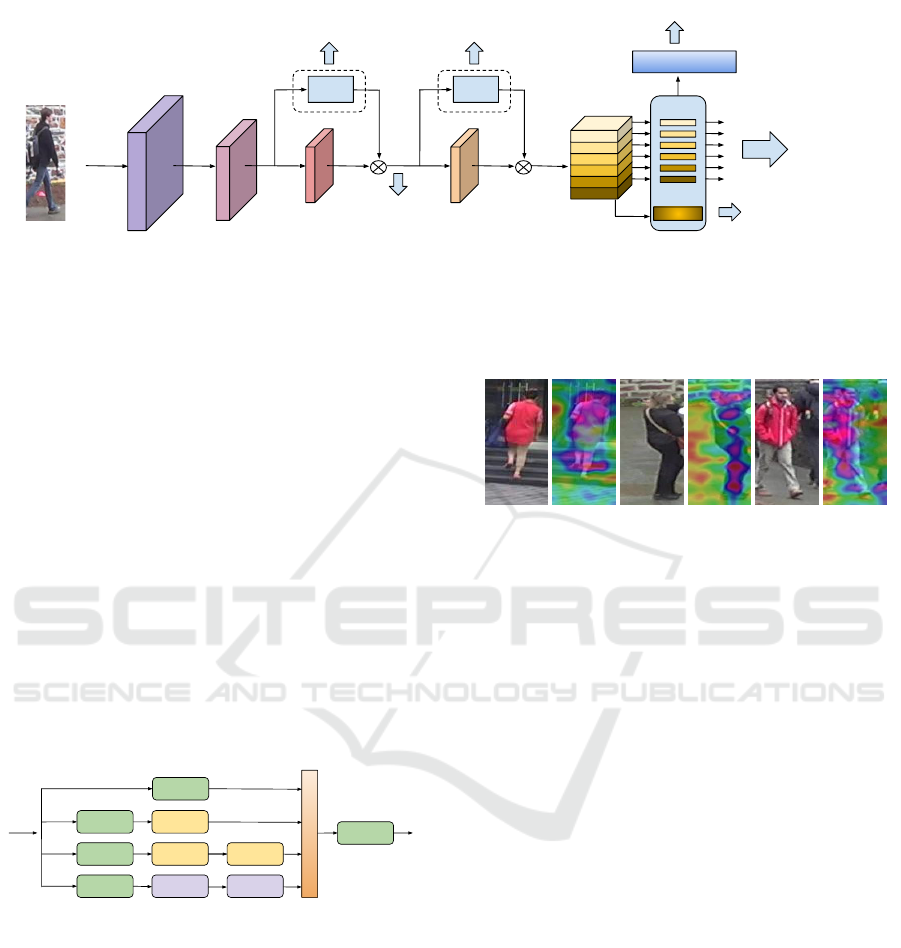
The overall architecture of our proposed model is
shown in Figure 1.
Baseline Network: In this paper, we employ
ResNet50 (He et al., 2015) as a backbone network
with some modifications following (Sun et al., 2018):
the last average pooling and fully connected layers
have been removed as well as the down-sampling op-
eration at the first layer of stage 5. We denote the
dimension of the final feature map as C × H × W ,
where C is the encoded channel dimension, and H,W
are the height and width respectively. A feature ex-
tractor has been applied to the final feature map to
get a 512-dimensional global feature vector. Just like
PCB, we further divide the final feature map into 6
horizontal strips such that each strip is of dimension
C ×(H/6) ×W . Then each strip is fed to a feature ex-
tractor, so we end up getting 6 local feature vectors in
total with dimension 256 each. Afterward, each fea-
ture is input to a fully-connected (FC) layer and the
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
414
Attention
ResNet-50
stage 2
ResNet-50
stage 1
ResNet-50
stage 3
ResNet-50
stage 4
Triplet loss
Input images
Combined features
Camera loss Camera loss
Triplet loss
Global
Softmax loss
Softmax loss
Local
Attention
Figure 1: The structure of the proposed network (VMRFANet). Two attention modules are mounted to the third and fourth
stages of ResNet50 backbone. Six local features are extracted from the last feature map together with a global feature. All
seven features are concatenated and normalized to form a final descriptor of a pedestrian bounding box.
following Softmax function to classify the identities
of the input images. Finally, all 7 feature vectors (6
local and 1 global) are concatenated to form a 2048-
dimensional feature vector for inference.
Other Components: Two Multi-Receptive Field At-
tention (MRFA) modules, which will be described
later in detail in Section 3.2, are added to the base-
line network. The first attention module takes the fea-
ture map after stage 2 block as an input. Its output
mask m
1
∈ (0, 1)
1024×24×8
is then applied to the fea-
ture map after stage 3 block by an element-wise multi-
plication. The second attention module is mounted to
stage 4 block similarly. Additionally, a feature extrac-
tor is connected to each attention module to extract a
512-dimensional feature for camera view classifica-
tion, which will be explained in detail in Section 3.3.
Input output
conv 1*1
conv 1*1
conv 1*1
conv 1*1
conv 3*3
conv 3*3
conv 1*7 conv 7*1
conv 1*1
conv 3*3
concatenation
Figure 2: The detailed structure of a Multi-Receptive Field
Attention (MRFA) module.
3.2 Multi-Receptive Field Attention
Module (MRFA)
To design the attention module, we use an Inception-
like (Szegedy et al., 2016) architecture. That is, we
design a shallow network with only up to four convo-
lutional layers. Meanwhile, various filter sizes (1 ×1,
3 × 3, 5 ×5, 7 ×7) have been adopted. And following
(Szegedy et al., 2016), we further reduce the num-
ber of parameters by factorizing convolutions with
(a) (b)
(c) (d) (e) (f)
Figure 3: Attention map of our MRFA module. (a) (c) (e)
show the original images and (b) (d) (f) illustrate the cor-
responding attention maps. Attention maps show that our
attention mechanism can focus on the person and filter out
the background noise.
large filters of sizes 5 × 5 and 7 × 7 into two smaller
3 × 3 filters, and two asymmetric filters of sizes 1 × 7
and 7 × 1, respectively. The structure of MRFA is
shown in Figure 2. Our proposed attention structure
can combine different reception field information and
learn a different level of knowledge to make a deci-
sion which region we should pay more attention to.
Figure 3 shows that our attention mechanism can fo-
cus on the person’s body and filter out background
noise.
The input feature of channel dimension C is first
convolved by four 1 × 1 filters to be divided into four
sub-features with channel dimension C/4 each. Then
each sub-feature (except the one in the 1 × 1 filter
branch) goes through filters of different sizes. For
each filter, appropriate padding is applied to ensure
the invariant of spatial dimensions. Finally, all four
sub-features will be concatenated to form a feature of
channel dimension C, followed by a 1× 1 convolution
to be up-sampled to channel dimension 2C to match
the channel size of feature from backbone network. A
tanh + 1 function will be applied elemental-wise on
the output attention map to normalize it to the range
of (0,2). Note that due to spatial down-sampling at
the beginning of stage 3 block, we need to apply aver-
VMRFANet: View-specific Multi-Receptive Field Attention Network for Person Re-identification
415

(a)
(b)
(c)
Figure 4: Example images from DukeMTMC-reID. (a)
show bounding boxes of the same person captured by three
different cameras. The included backgrounds and the view
conditions various dramatically. (b) correspond to three dif-
ferent identities captured by a single camera such that they
appear to be visually similar. (c) indicate the case of within-
view inconsistency, i.e., the same person was captured by
the same camera with different occlusions.
age pooling after each 1 ×1 filter to ensure the match-
ing of spatial dimensions between attention mask and
feature map from backbone network.
3.3 View Specific Learning through
Attention Mechanism
Our goal is to match people across different camera
views distributed at different locations. The variation
of cross-view person appearances can be dramatic due
to various viewpoints, illumination conditions, and
occlusion. As we can see, the same person looks dif-
ferent under different cameras and different persons
look similar under same camera in Figure 4
To tackle this issue, we thought it’s effective to
utilize the view-specific transformation. To make
our network be aware of different camera views, we
force our model to “know” which view the input
bounding box belongs to. As a result, this task is
converted to a camera ID (view) classification prob-
lem. However, in person re-ID task, the goal is
to learn a camera-invariant feature which contradicts
with camera ID (view) classification. To utilize the
camera-specific information without affecting learn-
ing a camera-invariant final feature, we found it is nat-
ural to incorporate the view-specific transformation
into our attention mechanism instead of adding on the
backbone network. By adding camera ID (view) clas-
sification on the attention mechanism, we make it be
aware of the view-specific information and could fo-
cus on the right place without affecting the camera-
invariant features extracted from the backbone net-
work.
This distance can be written as:
d
l
({x
x
x
i
,v
i
},{x
x
x
j
,v
j
}) = kU
U
U
T
v
i
x
x
x
i
−U
U
U
T
v
j
x
x
x
j
k
2
(1)
where x
x
x
i
is the extracted feature of i-th bounding box,
v
i
denotes the corresponding index of camera view,
and U
U
U
v
i
is the view-specific transformation.
By connecting a simple feature extractor to each
attention module, we denote the extracted attention
feature k(k = 1,2) as a
a
a
k
. We further add a fully con-
nected layer to each feature extractor, the softmax loss
is formulated as:
L
softmax
camera
= −
1
N
N
∑
i=1
2
∑
k=1
log
exp(W
W
W
T
v
i
a
a
a
i
k
)
∑
N
v
j=1
exp(W
W
W
T
j
a
a
a
i
k
)
(2)
where W
W
W
j
corresponds to the weight vector for cam-
era ID j, with the size of mini-batch N and the number
of cameras in the dataset N
v
.
There remains one issue that needs to be dealt with
carefully: the within-view inconsistency (see row (c)
in Figure 4), which arises when bounding boxes are
detected at different locations within frames captured
by the same camera. In that case, the view conditions
can be distinct since different parts of the background
will be included. To address this issue, we adopt a la-
bel smoothing (Szegedy et al., 2016) strategy on the
softmax loss in Equation 2: for a training example
with ground-truth label v
i
, we modify the label distri-
bution q( j) as:
q
0
( j) = (1 − ε)δ
j,v
i
+
ε
N
v
(3)
Here δ
j,v
i
is the Kronecker delta function and (1 − ε)
controls the level of confidence of the view classifi-
cation. Thus the final loss function for view-specific
learning can be written as:
L
camera
= −
1
N
N
∑
i=1
2
∑
k=1
N
v
∑
j=1
log p( j)q
0
( j) (4)
Where p( j) is the predicted probability which is cal-
culated by applying the softmax function on the out-
put vector of the fully connected layer.
3.4 Combined Loss
Person re-identification is essentially a zero-shot
learning task that identities in the training set will not
overlap with those in the test set. But in order to let
the network learn discriminate features, we can still
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
416

formulate it as a multi-label classification problem by
applying a softmax cross-entropy loss:
L
ID
= −
1
N
7
∑
k=1
N
∑
i=1
log
exp(W
W
W
T
y
j
,k
x
x
x
i
k
)
∑
C
j=1
exp(W
W
W
T
j,k
x
x
x
i
k
)
(5)
where k is the index of features where k ∈ [1,..., 6]
corresponds to the 6 local features and k = 7 corre-
sponds to the global feature, W
W
W
j,k
is the weight vector
for identity j, and x
x
x
k
is the extracted feature from each
component.
To further improve the performance and speed up
the convergence, we apply the batch-hard triplet loss
(Hermans et al., 2017). Each mini-batch, consisting
of N images, is selected with P identities and K im-
ages from each identity.
L
1
triplet
=
1
PK
P
∑
i=1
K
∑
a=1
[m + max
p=1...K
kx
x
x
(i)
a
−x
x
x
(i)
p
k
2
− min
n=1...K
j=1...P
j6=i
kx
x
x
(i)
a
−x
x
x
( j)
n
k
2
]
+
(6)
where x
x
x
(i)
a
, x
x
x
(i)
p
, and x
x
x
( j)
n
are the concatenated and nor-
malized final feature vectors which are extracted from
anchor, positive, and negative samples respectively,
and m is the margin that restricts the differences be-
tween Intra and inter-class distances.
To further ensure the cross-view consistency,
we also calculate a triplet loss L
2
triplet
on a 512-
dimensional feature vector extracted from the feature
map after applying the first attention mask.
By combining all the above losses, our final ob-
jective for end-to-end training can be written as mini-
mizing the loss function below:
L
combined
= L
ID
+ λ
1
L
1
triplet
+ λ
2
L
2
triplet
+ λ
3
L
camera
(7)
where λ
1
, λ
2
and λ
3
are used to balance between the
classification loss, triplet loss, and camera loss.
3.5 Gaussian Horizontal Data
Augmentation
A major issue that strip-based models cannot circum-
vent is misalignment. PCB baseline equally slices the
last feature map into local strips. Although being fo-
cused, the receptive field of each strip actually covers
a large fraction of an input image. That is, each local
strip can still ‘see’ at least an intact part of the body.
Thus, even without explicitly varying feature scales,
such as fusing pyramid features or assembling multi-
ple branches with different granularities, the potential
of our baseline network to handle misalignment is still
theoretically guaranteed.
(a) (b) (c) (d) (e)
Figure 5: An example of imperfect bounding box detection
in Market-1501 dataset. (a) is well detected. (b) the bottom
part of body has been cropped out. (c) too much background
has been included at the bottom. (d) top part is missing. (e)
too much background has been included at the top. Imper-
fect bounding box detection causes misalignment problem
which is particularly noxious to strip-based re-ID models.
So the remaining question is how to generate new
data mimicking the imperfections of bounding box
detection. Some examples of problematic detection
that can cause misalignment found in Market-1501
dataset is shown in Figure 5. Since the feature cut-
ting is along the vertical direction and global pooling
is applied on each strip, the baseline model is more
sensitive to the vertical misalignment than the hori-
zontal counterpart. Thus a commonly used random
cropping/padding data augmentation is sub-optimal
in this case. Instead, we propose a horizontal data
augmentation strategy. To be specific, we only ran-
domly crop/pad the top or bottom of the input bound-
ing boxes, by a fraction of the absolute value of a
float number drawn from a Gaussian distribution with
mean 0 and standard deviation σ. That is, we as-
sume the level of inaccurate detection follows a form
of Gaussian distribution. In all our experiments, the
standard deviation σ is set to 0.05. This fraction is
further clipped at 0.15 to prevent generating outliers.
Cropping is adopted when the random number is neg-
ative, otherwise, padding is applied. Only with a
probability of 0.4, the input images will be augmented
in the above way.
4 EXPERIMENTS AND RESULTS
4.1 Datasets and Evaluation Metrics
We conduct extensive tests to validate our proposed
method on three publicly available person ReID
datasets.
Market-1501: This dataset (Zheng et al., 2015) con-
sists of 32,668 images of 1,501 labeled persons cap-
tured from 6 cameras. The dataset is split up into
a training set which contains 12,936 images of 751
VMRFANet: View-specific Multi-Receptive Field Attention Network for Person Re-identification
417

identities, and test set with 3,368 query images and
19,732 gallery images of 750 identities.
DukeMTMC-reID: This dataset is a subset of
DukeMTMC (Ristani et al., 2016) which contains
36,411 images of 1,812 persons captured by 8 cam-
eras. 16,522 images of 702 identities were selected
as training samples, and the remaining 702 identities
are in the testing set consisting of 2,228 query images
and 17,661 gallery images.
CUHK03: CUHK03 (Li et al., 2014) consists of
14096 images from 1467 identities. The whole
dataset is captured by six cameras and each iden-
tity is observed by at least two disjoint cameras. In
this paper, we follow the new protocol (Zhong et al.,
2017a) which divides the CUHK03 dataset into a
training/testing set similar to Market-1501.
Evaluation Metrics: To evaluate each compo-
nent of our proposed model and also compare the
performance with existing state-of-the-art methods,
we adopt Cumulative Matching Characteristic(CMC)
(Gray et al., 2007) at rank-1 and Mean Average Pre-
cision(mAP) in all our experiments. Note that all the
experiments are conducted in a single-query setting
without applying re-ranking (Zhong et al., 2017a).
4.2 Implementation Details
Data Pre-processing: During training, the input im-
ages will be re-sized to a resolution of 384 × 128 to
better capture detailed information. We deploy ran-
dom horizontal flipping and random erasing (Zhong
et al., 2017b) for data augmentation. Note that our
complete framework contains a horizontal data aug-
mentation which will be deployed before image re-
sizing.
Loss Hyper-parameters: In all our experiments, we
set the parameter of label smoothing softmax loss ε =
0.1. Because our classification loss is the addition of
global classification loss and local classification loss,
so we give weight to the triplet loss. The parameters
for the combined loss are set to λ
1
= 5, λ
2
= 5 and
λ
3
= 1. Here we set P = 24 and K = 4 in triplet loss
to train our proposed model.
Optimization: We use SGD with momentum 0.9 to
optimize our model. The weight decay factor is set
to 0.0005. To let the components that haven’t been
pre-trained get up to speed, we set the initial learn-
ing rate of attention modules, feature extractors, and
classifiers to 0.1, while we set the initial learning rate
of the backbone network to 0.01. The learning rate
will be dropped by half at epochs 150, 180, 210, 240,
270, 300, 330, 360, and we let the training run for 450
epochs in total.
4.3 Ablation Study
We further perform comprehensive ablation studies
with each component of our proposed model on
Market-1501 datasets.
Table 1: Evaluating each component in our proposed
method.
Dataset Market-1501
Metric(%) rank 1 mAP
Baseline 93.2 82.2
Base+MRFA 93.8 83.2
- features before ⊗+CAM 93.3 82.8
- features after ⊗+CAM 93.3 83.1
Base+MRFA+CAM 94.3 83.9
Base+MRFA+CAM+TL 95.2 87.5
Base+MRFA+CAM+TL+HDA 95.5 88.1
Benefit of Attention Modules: We first evaluate the
effect of our proposed multi-receptive field attention
(MRFA) module by comparing it with the baseline
network. The results are shown in table 1. We ob-
serve an improvement of 0.6%/1.0% rank 1/mAP on
Market-1501. Notice that MRFA is only added to the
last two stages of the ResNet50 baseline. We observe
little improvements when adding MRFA to the front
stages of the backbone network. Considering the cost
of a more complicated network, we decide to only add
MRFA on the last two stages.
Effectiveness of View-specific Learning: We com-
pare the performance of our proposed model with and
without adding the camera ID classification loss to
the MRFA modules (see first and the last row of ta-
ble 1). We see 0.5%/0.7% gain at rank 1/mAP on
Market1501 with view specific learning on attention
mechanism.
To further show the necessity for adding camera
loss on attention mechanism and the primary cause
of the performance gain is not simply because of in-
troducing a harder objective, we conduct experiment
moving two camera losses from attention mechanism
to features of corresponding stages (stage 3 and stage
4) of the backbone network. We experiment two set-
tings, one is to add camera loss before ⊗ operation
with attention and another is to add camera loss after
⊗ operation. In both setting (see fourth and fifth rows
in table 1) , we see degradation on rank 1 and mAP. It
demonstrated that adding camera loss directly on the
backbone network is not helpful. It likely affects the
camera-invariant features extracted by the backbone
network.
Benefit of Combined Objective Training with
Triplet and Softmax Loss: Our network is trained by
minimizing both triplet loss and softmax loss jointly.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
418
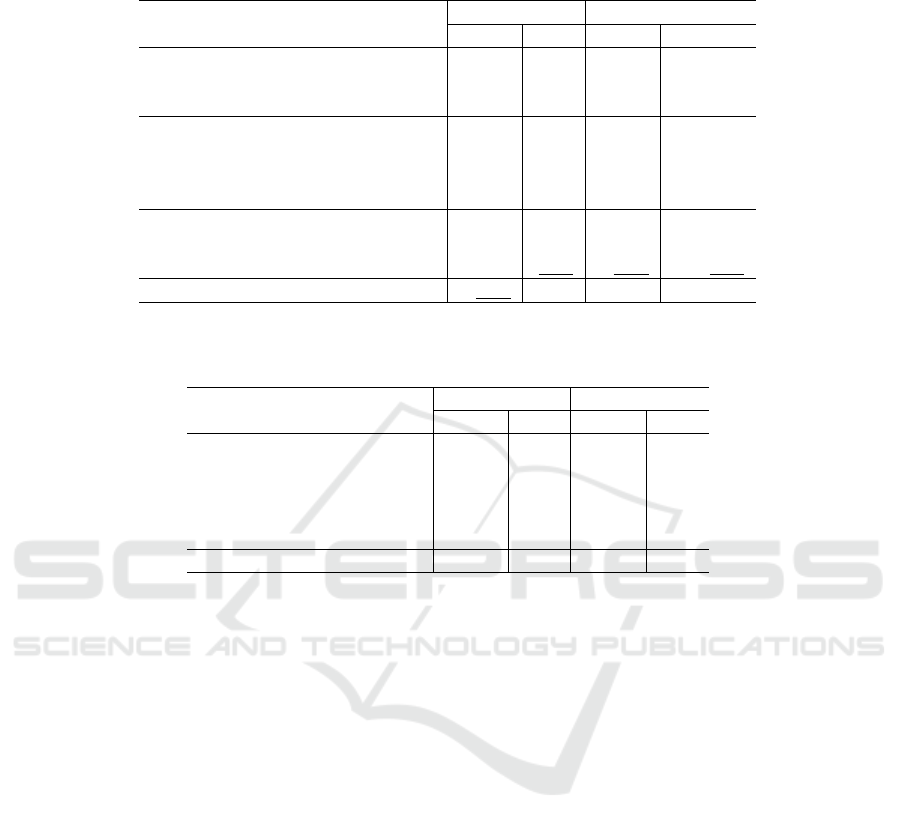
Table 2: Comparison with the state-of-the-arts on Market-1501 and DukeMTMC-ReID datasets. The best results are in bold,
while the numbers with underlines denote the second best.
Model
Market1501 DukeMTMC-reID
rank 1 mAP rank 1 mAP
SVDNet(Sun et al., 2017) 82.3 62.1 76.7 56.8
PAN(Zheng et al., 2018) 82.8 63.4 71.6 51.5
MultiScale(Chen et al., 2017) 88.9 73.1 79.2 60.6
MLFN (Chang et al., 2018) 90.0 74.3 81.0 62.8
HA-CNN(Li et al., 2018) 91.2 75.7 80.5 63.8
Mancs(Wang et al., 2018a) 93.1 82.3 84.9 71.8
Attention-Driven(Yang et al., 2019) 94.9 86.4 86.0 74.5
PCB+RPP(Sun et al., 2018) 93.8 81.6 83.3 69.2
HPM (Fu et al., 2018) 94.2 82.7 86.6 74.3
MGN (Wang et al., 2018b) 95.7 86.9 88.7 78.4
VMRFANet(Ours) 95.5 88.1 88.9 80.0
Table 3: Comparison of results on CUHK03-labeled (CUHK03-L) and CUHK03-detected (CUHK03-D) with new protocol
(Zhong et al., 2017a). The best results are in bold, while the numbers with underlines denote the second best.
Model
CUHK03-L CUHK03-D
rank 1 mAP rank 1 mAP
SVDNet(Sun et al., 2017) 40.9 37.8 41.5 37.3
MLFN(Chang et al., 2018) 54.7 49.2 52.8 47.8
HA-CNN(Li et al., 2018) 44.4 41.0 41.7 38.6
PCB+RPP(Sun et al., 2018) – – 63.7 57.5
MGN(Wang et al., 2018b) 68.0 67.4 68.0 66.0
MRFANet (Ours) 81.1 78.8 78.9 75.3
We evaluated its performance comparing to our base-
line+MRFA+CAM setting. We found that the combi-
nation of losses not only brings significant improve-
ments (+0.9%/ +3.6% rank 1/mAP on Market-1501)
on the performance but also speeds up the conver-
gence. Notably, the triplet loss is essential since it
serves as the cross-view consistency regularization
term in the view-specific learning mechanism.
Impact of Horizontal Data Augmentation on
Strip-based Re-ID Model: Finally, we add hor-
izontal data augmentation to the network Base-
line+MRFA+CAM and get our final view-specific
multi-receptive field attention network (VMRFANet:
Baseline+MRFA+CAM+HDA). We do the compar-
isons of the models with and without horizontal data
augmentation. The performance gain (+0.3%/ +
0.6% rank 1/mAP on Market-1501 dataset) proves
the effectiveness of the data augmentation strategy
against misalignment.
4.4 Comparison with State-of-the-art
We evaluate our proposed model against current state-
of-the-arts methods on three large benchmarks. The
comparisons on Market-1501 and DukeMTMC-reID
are summarized in Table 2, while the results on
CUHK03 is shown in Table 3.
Results on Market-1501: Our method achieves the
best result on mAP metric, and the second best on
rank 1. It outperforms all other approaches except
a strip-based method MGN (Wang et al., 2018b) on
rank 1 metric. However, MGN incorporates three
independent branches after stage 3 of the ResNet50
backbone to extract features with multi-granularity.
Moreover, the difference is only marginal, and our
method has achieved this competitive result using a
much smaller network. Remarkably, on this dataset
whose bounding boxes are automatically detected,
the Gaussian horizontal data augmentation strategy
greatly improves the robustness of the model.
Results on DukeMTMC-reID: Our method achieves
the best results on this dataset at both metrics. No-
tably, PCB (Sun et al., 2018) is a strip-based model
that serves as the starting point of our approach. We
surpassed it by +10.8% on mAP and +5.6% on rank
1. MGN gets the second best results among all com-
pared methods on this dataset. On the other hand, our
model outperforms the listed attention-based models
by a large margin.
Results on CUHK03: To evaluate our proposed
method on CUHK03, we follow the new protocol
(Zhong et al., 2017a). However, since only a relative
VMRFANet: View-specific Multi-Receptive Field Attention Network for Person Re-identification
419

label (with binary values 1 and 2) is used for iden-
tifying which camera that an image is coming from,
we found it hard to extract the exact camera IDs from
CUHK03. Thus we only test our model without en-
abling the view-specific learning on this dataset. In
table 3, we show the results of our proposed method
on CUHK03. Remarkably, although the MRFA mod-
ule is not guided by camera ID, our model still out-
performs all other methods by a large margin.
5 CONCLUSION
In this work, we introduce a novel multi-receptive
field attention module which brings a considerable
performance boost to a strip-based person re-ID net-
work. Besides, we propose a horizontal data augmen-
tation strategy which is shown to be particularly help-
ful against misalignment issues. Combined with the
idea of injecting view information through the atten-
tion module, our proposed model achieves superior
performance comparing to current state-of-the-art on
three widely used person re-identification benchmark
datasets.
REFERENCES
Cai, H., Wang, Z., and Cheng, J. (2019). Multi-
scale body-part mask guided attention for person re-
identification. In 2019 The IEEE Conference on
Computer Vision and Pattern Recognition Workshop
(CVPRW).
Chang, X., Hospedales, T. M., and Xiang, T. (2018). Multi-
level factorisation net for person re-identification.
2018 IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Chen, Y., Zhu, X., and Gong, S. (2017). Person re-
identification by deep learning multi-scale represen-
tations. In 2017 IEEE International Conference on
Computer Vision Workshops (ICCVW), pages 2590–
2600.
Fu, Y., Wei, Y., Zhou, Y., Shi, H., Huang, G., Wang, X.,
Yao, Z., and Huang, T. (2018). Horizontal pyramid
matching for person re-identification. arXiv preprint
arXiv:1804.05275.
Gray, D., Brennan, S., and Tao, H. (2007). Evaluating ap-
pearance models for recognition, reacquisition, and
tracking.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. arXiv preprint
arXiv:1512.03385.
Hermans, A., Beyer, L., and Leibe, B. (2017). In defense
of the triplet loss for person re-identification. arXiv
preprint arXiv:1703.07737.
Li, W., Zhao, R., Xiao, T., and Wang, X. (2014). Deep-
reid: Deep filter pairing neural network for person re-
identification. In The IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Li, W., Zhu, X., and Gong, S. (2018). Harmonious attention
network for person re-identification. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 2285–2294.
Ristani, E., Solera, F., Zou, R., Cucchiara, R., and Tomasi,
C. (2016). Performance measures and a data set
for multi-target, multi-camera tracking. In European
Conference on Computer Vision workshop on Bench-
marking Multi-Target Tracking.
Sun, Y., Zheng, L., Deng, W., and Wang, S. (2017). Svd-
net for pedestrian retrieval. 2017 IEEE International
Conference on Computer Vision (ICCV).
Sun, Y., Zheng, L., Yang, Y., Tian, Q., and Wang, S. (2018).
Beyond part models: Person retrieval with refined part
pooling (and a strong convolutional baseline). In Pro-
ceedings of the European Conference on Computer Vi-
sion (ECCV), pages 480–496.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. In The IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Wang, C., Zhang, Q., Huang, C., Liu, W., and Wang, X.
(2018a). Mancs: A multi-task attentional network
with curriculum sampling for person re-identification.
In The European Conference on Computer Vision
(ECCV).
Wang, G., Yuan, Y., Chen, X., Li, J., and Zhou, X. (2018b).
Learning discriminative features with multiple granu-
larities for person re-identification. In Proceedings of
the 26th ACM International Conference on Multime-
dia, MM ’18, pages 274–282, New York, NY, USA.
ACM.
Yang, F., Yan, K., Lu, S., Jia, H., Xie, X., and Gao, W.
(2019). Attention driven person re-identification. Pat-
tern Recognition, 86:143 – 155.
Yu, H., Wu, A., and Zheng, W. (2018). Unsupervised per-
son re-identification by deep asymmetric metric em-
bedding. IEEE Transactions on Pattern Analysis and
Machine Intelligence, pages 1–1.
Zhang, X., Luo, H., Fan, X., Xiang, W., Sun, Y., Xiao,
Q., Jiang, W., Zhang, C., and Sun, J. (2017). Aligne-
dreid: Surpassing human-level performance in person
re-identification. arXiv preprint arXiv:1711.08184.
Zheng, L., Shen, L., Tian, L., Wang, S., Wang, J., and Tian,
Q. (2015). Scalable person re-identification: A bench-
mark. In The IEEE International Conference on Com-
puter Vision (ICCV).
Zheng, Z., Zheng, L., and Yang, Y. (2018). Pedestrian align-
ment network for large-scale person re-identification.
IEEE Transactions on Circuits and Systems for Video
Technology, page 1–1.
Zhong, Z., Zheng, L., Cao, D., and Li, S. (2017a). Re-
ranking person re-identification with k-reciprocal en-
coding. 2017 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y.
(2017b). Random erasing data augmentation. arXiv
preprint arXiv:1708.04896.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
420
