
Intelligent Roundabout Insertion using Deep Reinforcement Learning
Alessandro Paolo Capasso
1
, Giulio Bacchiani
1
and Daniele Molinari
2
1
VisLab - University of Parma, Parma, Italy
2
VisLab, Parma, Italy
Keywords:
Autonomous Driving, Deep Reinforcement Learning, Multi-agent Systems, Agent Cooperation and
Negotiation, Maneuver Planning System.
Abstract:
An important topic in the autonomous driving research is the development of maneuver planning systems.
Vehicles have to interact and negotiate with each other so that optimal choices, in terms of time and safety,
are taken. For this purpose, we present a maneuver planning module able to negotiate the entering in busy
roundabouts. The proposed module is based on a neural network trained to predict when and how entering the
roundabout throughout the whole duration of the maneuver. Our model is trained with a novel implementation
of A3C, which we will call Delayed A3C (D-A3C), in a synthetic environment where vehicles move in a
realistic manner with interaction capabilities. In addition, the system is trained such that agents feature a
unique tunable behavior, emulating real world scenarios where drivers have their own driving styles. Similarly,
the maneuver can be performed using different aggressiveness levels, which is particularly useful to manage
busy scenarios where conservative rule-based policies would result in undefined waits.
1 INTRODUCTION
The study and development of autonomous vehicles
have seen an increasing interest in recent years, be-
coming hot topics in both academia and industry. One
of the main reasearch areas in this field is related to
control systems, in particular planning and decision-
making problems. The basic approaches for schedul-
ing high-level maneuver execution modules are based
on the concepts of time-to-collision (van der Horst
and Hogema, 1994) and headway control (Hatipoglu
et al., 1996). In order to add interpretation capa-
bilities to the system, several approaches model the
driving decision-making problem as a Partially Ob-
servable Markov Decision Process (POMDP, (Spaan,
2012)), as in (Liu et al., 2015) for urban scenarios
and in (Song et al., 2016) for intersection handling.
A further extension is proposed in (Bandyopadhyay
et al., 2012) where a Mixed Observability Markov De-
cision Process (MOMDP) (Ong et al., 2010) is used
to model uncertainties in agents intentions. However,
since vehicles are assumed to behave in a determinis-
tic way, the aforementioned approaches handle many
situations with excessive prudence and would not be
able to enter in a busy roundabout.
For this reason, the trend of using Deep Learning
techniques (Goodfellow et al., 2016) for modeling
such complex behaviors is growing; in particu-
lar Deep Reinforcement Learning (DRL) (Franc¸ois-
Lavet et al., 2018) algorithms have proved to be
efficient even in high-dimensional state spaces and
have already been extended to the autonomous driv-
ing field, as in (Isele et al., 2018) for intersection
handling and in (Hoel et al., 2018) for lane changes.
However, these works show a major limitation, which
is the lack of communication capabilities among ve-
hicles. In fact, those models are trained on synthetic
environments in which vehicles movements are based
on hard coded rules. A solution to this problem is
proposed in (Shalev-Shwartz et al., 2016), where ve-
hicles inside the simulator were trained through Imi-
tation Learning (Codevilla et al., 2017); however, this
approach is expensive since it requires a huge amount
of training data.
In our proposed work, this limitation has been
overcome training the model in an environment popu-
lated by vehicles whose behavior has been learned in
a multi-agent fashion as in (Bacchiani et al., 2019). In
this way, drivers are able to implicitly communicate
through actions and feature a unique, programmable,
style of driving, enhancing the realism of the simu-
lation. In order to train agents efficiently in this sce-
nario, a different version of A3C (Mnih et al., 2016)
has been implemented in which the asynchronous
378
Capasso, A., Bacchiani, G. and Molinari, D.
Intelligent Roundabout Insertion using Deep Reinforcement Learning.
DOI: 10.5220/0008915003780385
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 378-385
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

agents policies are updated with a lower rate enhanc-
ing agents exploration; for this reason it has been
called Delayed A3C (D-A3C). Desired actions are
chosen based on a sequence of images representing
what the agent perceives around it. Moreover, our so-
lution permits to set the level of aggressiveness of the
artificial driver executing the maneuver; this is essen-
tial in those situations in which an excessively cau-
tious behavior or rule-based policies would lead to
undefined waits, as in case of insertion in a highly
busy roundabout.
As in (Behrisch et al., 2011) and in (Bansal et al.,
2018), it has been adopted a simplified synthetic rep-
resentation of the environment which is easily repro-
ducible by both simulated and real data, so that the
system trained offline can be easily validated on a real
car equipped with perception systems. Furthermore,
this representation greatly helps in reducing the sam-
ple complexity of the problem respect to simulators
featuring a realistic graphic such as CARLA (Doso-
vitskiy et al., 2017) or GTA-based platforms (Richter
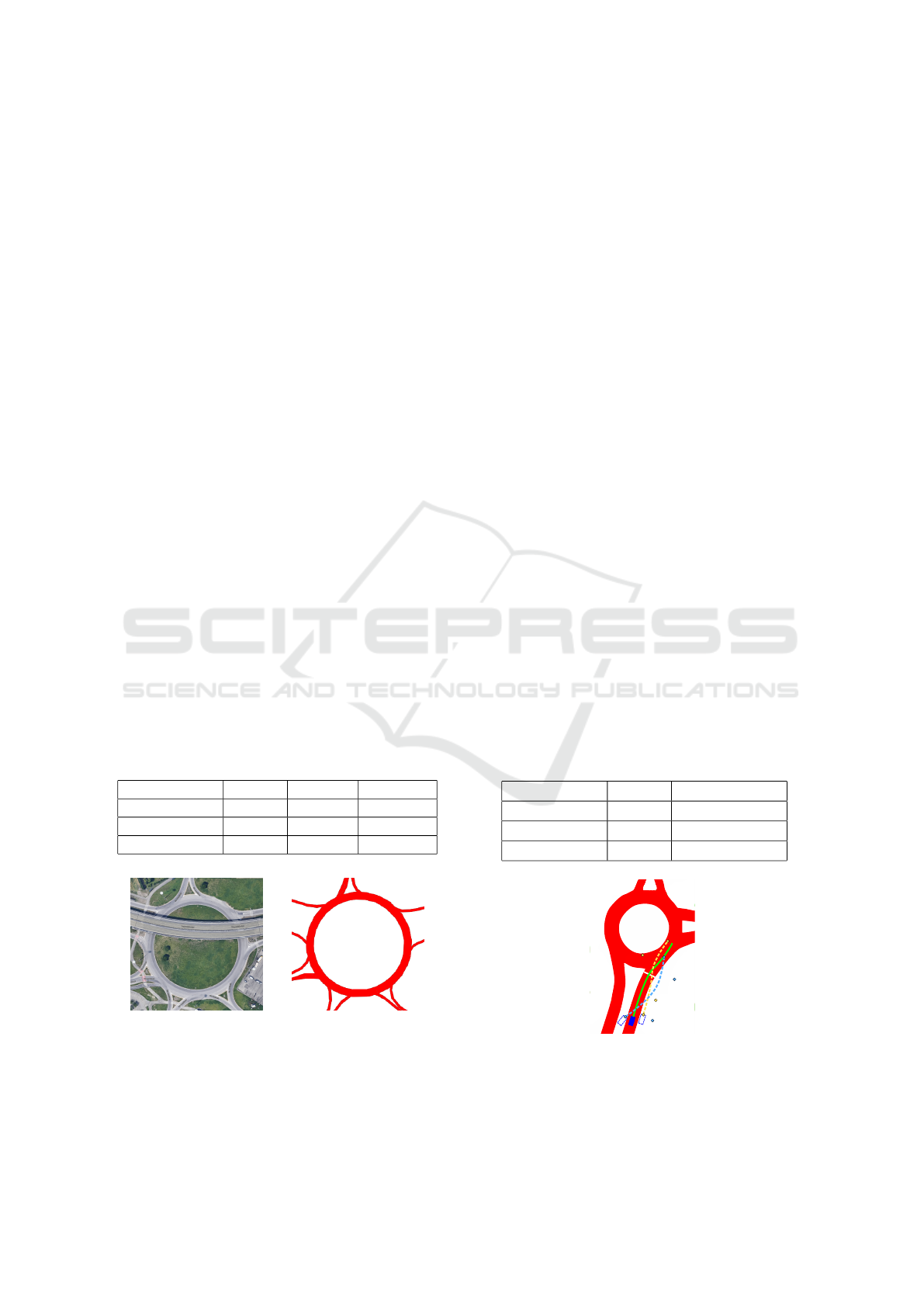
et al., 2016). Our test-bed scenario is the synthetic re-
construction of a real roundabout built with the Cairo
graphic library (Packard and Worth, 2019), shown in
Figure 1.
However, since obstacles detected by the perception
systems are not always accurate, our system has been
evaluated also in the case of random noise added to
the position, size and pose of the vehicles, as well as
on the trajectory followed by the agents.
The model trained on the single scenario of Figure 1b
has been tested on a different type of roundabout,
shown in Figure 5, in order to evaluate the general-
ization capabilities of the system.
Finally, tests on real data have been performed us-
ing logs recorded with a vehicle equipped with proper
sensors.
2 BACKGROUND
2.1 Reinforcement Learning
Reinforcement Learning (Sutton and Barto, 2018)
deals with the interaction between an agent and its
environment. The actor tries to learn from attempts
and errors, receiving a reward signal and observ-
ing the state of the environment at every time step.
The reward is typically a scalar value and it is re-
lated to the sequence of actions taken until that mo-
ment. The goal of an agent acting inside an envi-
ronment at time t, is to learn a policy which maxi-
mizes the so called expected return, which is a func-
tion of future rewards; this is generally defined as
(a) Real (b) Synthetic
Figure 1: Top view of a roundabout (a) and its synthetic
representation (b). The green square in (b) highlights the
portion of the surrounding perceived by the green vehicle,
which is the artificial representation of the red car in (a).
R
t
=
∑
T
t
r
t
+ γr
t+1
+ ··· + γ
T −t
r
T −t
, where T is the
terminal time step and γ is a discount factor, used to
reduce the importance of future rewards respect to the
short-term ones.
2.2 Multi-agent A3C
One of the principal difficulties of DRL comes from
the strict correlation between consecutive states; ini-
tially, the problem was solved by picking up indipen-
dent states from a stored replay buffer (Mnih et al.,
2015), but this proved to be inefficient in multi-agent
scenarios (Gupta et al., 2017).
A different approach is taken in A3C (Mnih et al.,
2016), where several copies of the agent take actions
in parallel, so that each one experiences states of the
environment which are independent from those of the
others, enhancing the stability of the learning process.
Agents send their updates and amend their local copy
of the network every n-step frames.
Multi-agent A3C (Bacchiani et al., 2019) follows
the same principle, but allows some of the agents to
share the same instance of the environment, inducing
them to learn how to interact in order to commonly
achieve their goals. Thus, an implicit agent-to-agent
negotiation can gradually arise, since actions taken
from an agent will affect the state of others and vice-
versa.
2.3 A2C
A2C (Wu et al., 2017) is the synchronous variant of
A3C in which agents compute and send their updates
at fixed time intervals. This solution is more time-
efficient because it permits the computation of up-
dates of all agents in a single pass exploiting GPU
computing. However, since all agents hold the same
policy, the probability of converging on a local mini-
Intelligent Roundabout Insertion using Deep Reinforcement Learning
379

mum of the loss function may increase, altough it has
not yet proven empirically (Wu et al., 2017).
3 DECISION-MAKING MODULE
3.1 D-A3C Implementation
Our module is trained by a reinforcement learning al-
gorithm which we will refer to as Delayed A3C (D-
A3C), where the goal of the agent, called active, is a
safe insertion in a roundabout populated by other ve-
hicles, the passives, already trained in a multi-agent
fashion in order to be endowed with interaction ca-
pabilities (Bacchiani et al., 2019). The actions per-
formed by the active for entering the roundabout are
controlled by the output of a neural network whose ar-
chitecture is similar to the one adopted in (Bacchiani
et al., 2019).
Our implementation differs from the original A3C
in the way the asynchronous learners update the
global neural network collecting all the actors’ contri-
butions. Indeed, our learners exchange the computed
updates with the global network only at the end of
their episode, keeping the same policy for the whole
episode execution, while classic A3C does it at fixed
and shorter time intervals. This reduces the synchro-
nization burden of the algorithm, since the number of
parameter exchanges diminishes. Moreover, in Sec-
tion 4.1 we demonstrate that D-A3C leads to better
results than classical A3C in the analyzed task. We
did not carry further tests for evaluating the perfor-
mances of the two algorithms in other tasks, since it
is not the scope of this work; however, this compari-
son could be the subject of future studies.
(a) Navigable space (b) Path
(c) Obstacles (d) Stop line
Figure 2: Semantic layers of the input space of the agent.
The environment in which an agent is learning can
be different from that of another agent, permitting to
train the policy in a range of different scenarios si-
multaneously. Indeed, in our experiments we teach
the agents how to enter in a three-entry-roundabout
from all the entries simultaneously; nonetheless, in
order to achieve a sufficient amount of agents for the
learning process to be stable, we let multiple copies
of the agents to learn from every entry in indipendent
copies of the roundabout.
Multi-environment architectures should increase the
model generalization capabilities: this is tested in
Section 4.4 where the performance of our system is
evaluated on an unseen roundabout.
3.2 Input Space
The input space of the system is composed by two
different types of streams: a visual and a non-visual
sensory channel. The visual input is a sequence of
four images having size 84x84x4, that is a mapping
of the 50x50 meters of the vehicle’s sourrounding.
These images represent 4 semantic layers consisting
in the navigable space (Figure 2a) in which the agent
can drive, the path (Figure 2b) that the agent should
follow, the obstacles (Figure 2c) around the agent in-
cluding itself and the stop line (Figure 2d) that is the
position where the agent should stop if the entry can-
not be made safely.
On the other hand, the non-visual sensory channel
is composed by 4 entities: the first one is the agent
speed, that is the absolute value of the current speed
of the agent; the second one is the target speed, that
represents the maximum speed that the actor should
reach and maintain if there is no traffic and enough
visibility; the third one is the aggressiveness, namely
the degree of impetus in the maneuver execution and
the last one represents the last action performed by
the agent.
3.3 Output
The output of the maneuver planning system is a pre-
diction over the following states:
• Permitted: the agent perceives the entry area of
the roundabout as free and entering would not cre-
ate any dangerous situation. This state sets the ac-
celeration a of the active vehicle to a fixed com-
fort value a
max
unless the target speed is reached.
• Not Permitted: the agent predicts the entry area
of the roundabout as busy and entering would
be dangerous. This state produces a decelera-
tion computed as min(d
max
, d
stop line
), where d
max
is the maximum deceleration permitted following
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
380

comfort constraints, and d
stop line
is the decelera-
tion needed to arrest the active vehicle at the stop
line. If the agent has already overcome the stop
line, this state causes a brake of a d
max
value.
• Caution: the roundabout is perceived as not com-
pletely free by the active agent and the vehicle
should approach it with prudence, either to im-
prove the view for a safe entering or to observe if
an oncoming passive vehicle is willing to let it en-
ter the roundabout; the maximum speed permitted
to the agent is
1
2
target speed and a can assume
one of the following values:
a =
a
max
2
, if agent speed <
target speed
2
d
max
2
, if agent speed >
target speed
2
+ h
0, otherwise
(1)
where h is a costant set to 0.5.
3.4 Reward
The reward r
t
is composed by the following terms:
r
t
= r
danger
+ r
terminal
+ r
indecision
+ r
speed
(2)
r
danger
is a penalization given to the active agent when
it performs dangerous maneuvers and it is defined as:
r
danger
= −w
d
s
· α · d
s
− w
c
f
· α · c
f
(3)
in which,
• d
s
is a binary variable which is set to 1 when the
active vehicle violates the safety distance from
the passive one in front; this distance is equal to
the space traveled from the active agent in one
second, as shown from the yellow region in Fig-
ure 1b. When the safety distance is maintained the
value of d
s
is 0;
• c
f
is a binary variable and it is set to 1 when the
active agent cuts in front of a passive vehicle al-
ready inserted in the roundabout; this region is
equal to three times the distance traveled from the
passive vehicle in one second. This is shown from
the orange region in Figure 1b. If the learning ac-
tor does not break this rule the value of c
f
is 0.
• α depends on the aggressiveness level
of the active agent and it is defined as
α = (1 − aggressiveness). During the train-
ing phase, aggressiveness assumes a random
value from 0 to 1 kept fixed for the whole
episode. Higher values of aggressiveness
should encourage the actor to increase the
impatience; consequently, dangerous actions
will be less penalized. In the test phase we fix
the aggressiveness value in order to perform
comparisons among agents with different values
of this parameter, as shown in Section 4.3.
• w
d
s
and w
c
f
are weights set to 0.002 and 0.005
respectively.
r
terminal
depends on how the episode ends. In order
to avoid an excessively conservative behavior of the
active agent, it is imposed a maximum available time
for the actor to reach its target. The possible values
r
terminal
can assume are:
• +1: if the active agent ends the episode safely,
reaching its goal;
• −β − γ · α: if the active actor does not finish the
episode because of a crash with another agent. β
is a costant set to 0.2, while γ is the weight of α set
to 1.8. Hence, when a crash occurs, we modulate
r
terminal
based on the aggressiveness, for the same
reason explained for r
danger
.
• -1: if the time available to finish the episode ex-
pires.
r
indecision
is a negative reward in order to provide a
realistic and smooth behavior to the agent, avoiding
frequent changes of conflicting actions. It depends
on the last two states of the system: we penalize the
agent when the state passes from Permitted to one of
the others. Calling L1 and L2 the last and the second
to last outputs respectively, we can resume this reward
with the following equation:
r
indecision
=
−0.05, if L2 = Permitted
and L1 = Caution
−0.15, if L2 = Permitted
and L1 = Not Permitted
0, otherwise.
(4)
r
speed
is a positive reward which encourages the active
vehicle to increase the speed. It is defined as:
r
speed
= ψ ·
current speed
target speed
(5)
in which ψ is a constant set to 0.0045 and the target
speed at the denominator acts as a normalizing factor.
This reward shaping is essential to ensure that the
agents learn the basic rules of the road like the right
of way and the safety distance.
The following link (https://drive.google.com/open?
id=1iGc820O
qeBSrWHbwhPTiTyby HupM- )
shows how the active agent performs the entering in
the roundabout.
Intelligent Roundabout Insertion using Deep Reinforcement Learning
381
4 EXPERIMENTS
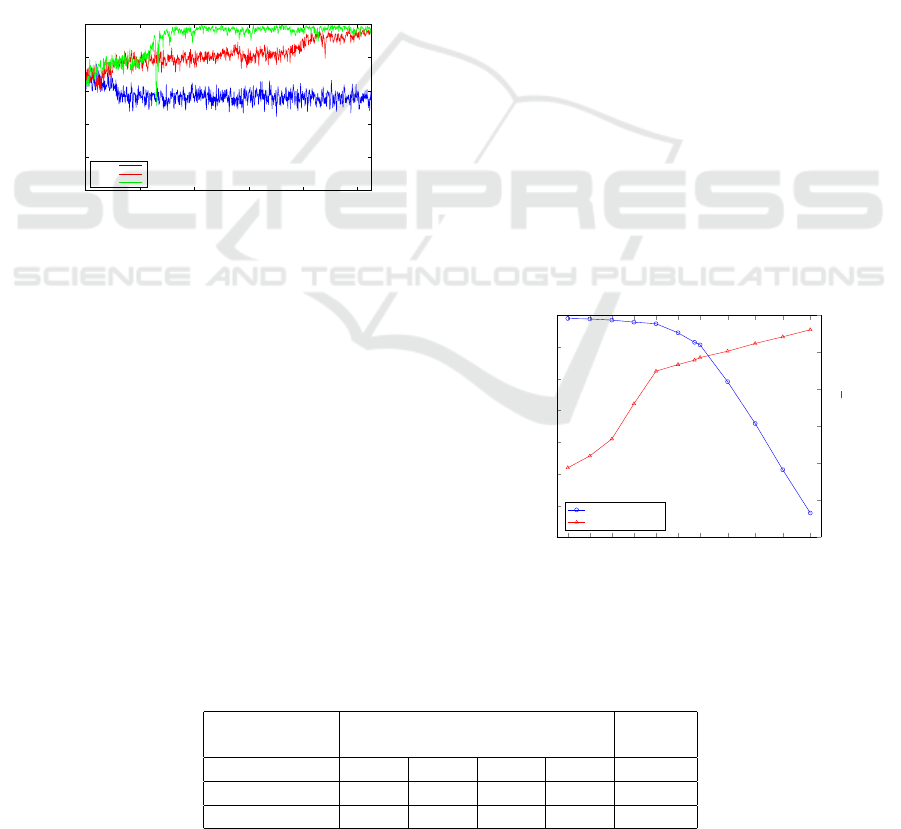
4.1 Algorithms Comparison
We compared the A3C and A2C algorithms with
our D-A3C implementation in order to test if our
implementation improves the learning performances.
The curves of Figure 3 show that A3C needs more
episodes than our method for learning successfully
the task. Instead, A2C converges on a suboptimal
solution, consisting on always outputting the Permit-
ted state, letting the agent entering the roundabout in-
dependently on the occupancy of the road. The ag-
gressiveness used during the training phase is chosen
randomly ([0, 1]) and kept fixed during each episode
both for passive and for active vehicles, while the
maximum number of passive vehicles populating the
roundabout (Figure 1b) simultaneously is set to 8.
0
0.2
0.4
0.6
0.8
1
0 20000 40000 60000 80000 100000
positive episodes [%]
episode
A2C
A3C
D-A3C
Figure 3: Moving average of the positive episodes ratio us-
ing D-A3C (green), A3C (red) and A2C (blue).
4.2 Comparison with a Rule-based
Approach
The metrics used to evaluate the performances are
Reaches, Crashes and Time-overs corresponding to
the percentages of episodes ended successfully, with
a crash and due to the depletion of the available time
respectively. Every test is composed by three experi-
ments (each one composed by 3000 episodes) using
three different traffic conditions: low, medium and
high which correspond to a maximum number of pas-
sive agents populating the roundabout to 4, 6 and 8
respectively. The results in Table 1 represent the av-
erage percentages of the three experiments. We com-
pared the results obtained by D-A3C model on the
training roundabout (Figure 1b) with those achieved
by a simple rule-based approach. In particular, we
set four tresholds (25, 20, 15 and 10 meters) corre-
sponding to the minimum distances required from a
passive vehicle to the active one for starting the en-
tering maneuver. Even if the percentages of crashes
are rather low, the results in Table 1 show that a rule-
based approach could lead to long waits since its lack
of negotiation and interaction capabilities brings the
agent to perform the entry only when the roundabout
is completely free.
4.3 Aggressiveness Tests
As explained in Section 3.2, the aim of the aggressive-
ness input is to give the possibility of modulating the
agent behavior depending on the traffic conditions.
This is achieved by shaping the rewards accordingly
to this input during the training phase as explained in
Section 3.4, and exposing the agent to different traffic
conditions. In order to prove the efficacy of the ag-
gressiveness tuning, we tested the D-A3C model on
a busy roundabout varying the aggressiveness level
from low to high, highlighting the full spectrum of
behaviors. We calculated the average speed of the ac-
tive vehicle and the ratio of the episodes which ended
successfully. As can be noted from Figure 4, the ag-
gressiveness input acts a crucial role in determining
the output of the module: higher values of this input
rise the impatience of the active vehicle which tends
to increase the risks taken. This produces an incre-
−0.2 0 0.2 0.4 0.6 0.8 1 1.25 1.5 1.75 2
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Aggressiveness
positive episodes [%]
0
1
2
3
4
5
6
average speed [
m
s
]
positive episodes
average speed
Figure 4: Values of average speed and positive episodes
ratio depending on the aggressiveness level of the active
agent.
Table 1: Comparison between D-A3C model and rule-based approach.
Rule-based
D-A3C
25m 20m 15m 10m
Reaches % 0.456 0.732 0.831 0.783 0.989
Crashes % 0.0 0.002 0.012 0.100 0.011
Time-overs % 0.544 0.266 0.157 0.117 0.0
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
382
ment of crashes with a consequent decrease of the
positive episodes ratio, but also an increase of the av-
erage speed value. In real-world tests, higher values
of aggressiveness can be useful in deadlock situations
(for example high traffic condition), flanking the mod-
ule with safety systems in order to avoid collisions.
Moreover, it is interesting to notice that the behavior
of the system is coherent also for those aggressive-
ness values outside the range used during the training
phase ([0, 1]).
4.4 Performances on Unknown
Roundabouts
We tested the system on a different type of round-
about from the one used in the training phase; the
new roundabout, shown in Figure 5, features a dif-
ferent shape and number of entries. We compared the
results achieved by the model with two different base-
lines: the first one obtained fixing the output of the
module to the Permitted state independently on the
occupancy of the road and the second one obtained
with random actions. Due to a larger area involved in
this test, low, medium and high traffic conditions cor-
respond to a maximum number of passive agents in-
side the roundabout to 10, 15 and 20 respectively. The
results in Table 2 show that the system features some
generalization capabilities; however, considering the
results achieved by D-A3C model on the training en-
vironment (Table 1), we can observe that the diversity
of the training set environments has to be increased
in order to improve the performances of the system in
unseen roundabouts.
Table 2: Results on the unknown roundabout.
D-A3C Random Permitted
Reaches % 0.910 0.684 0.676
Crashes % 0.085 0.270 0.324
Time-overs % 0.003 0.046 0.0
(a) Real
(b) Synthetic
Figure 5: Top view of the real (a) and its synthetic repre-
sentation (b) of the roundabout which was not seen by the
agent during training.
4.5 Perception-noise Injection
We introduced two types of noise in order to re-
duce the gap between synthetic and real data. We
added gaussian noise in the position, size and pose
estimation of passive agents to simulate those er-
rors of the systems on-board the real vehicle. Then,
we perturbed the path of active agents with Cubic
B
´
ezier curves computed by the De Casteljau algo-
rithm (Boehm and M
¨
uller, 1999), in order to avoid
following the same route as happens in the real world.
This noise is also useful to make the system more ro-
bust to localization errors that may occur during tests
on a self-driving vehicle. As shown in Figure 6, for
each episode we randomly chose the initial and the fi-
nal points, called P
i
and P
f
respectively; the only con-
straints are that a) P
i
ranges between the first point of
the original path (the green line in Figure 6) and the
stop line; b) P
f
ranges between the stop line and the
last point of the path. Finally, we calculated two an-
chors P
1
and P
2
choosing two random points along
the path and perturbating their coordinates (x, y) with
gaussian noise.
Starting from the D-A3C model, we used Curriculum
Learning (Bengio et al., 2009) to train the system in
the noisy environment obtaining a new model which
we call Noised D-A3C. We evaluated the two models
in the noised environment, performing tests as in Sec-
tion 4.2; the results in Table 3 show that the Noised D-
A3C model becomes more robust to localization and
perception errors. However, further tests on how to
achieve better generalization on real data will be per-
formed in future works.
Table 3: Results on the noised environment.
D-A3C Noised D-A3C
Reaches % 0.899 0.967
Crashes % 0.043 0.021
Time-overs % 0.058 0.012
P
1
P
2
P
1
P
2
P
f
P
i
P
i
P
f
Figure 6: Example of B
´
ezier curves: the green line (solid)
represents the original path, while the light blue and the yel-
low lines (dotted) represent two possible B
´
ezier curves.
Intelligent Roundabout Insertion using Deep Reinforcement Learning
383
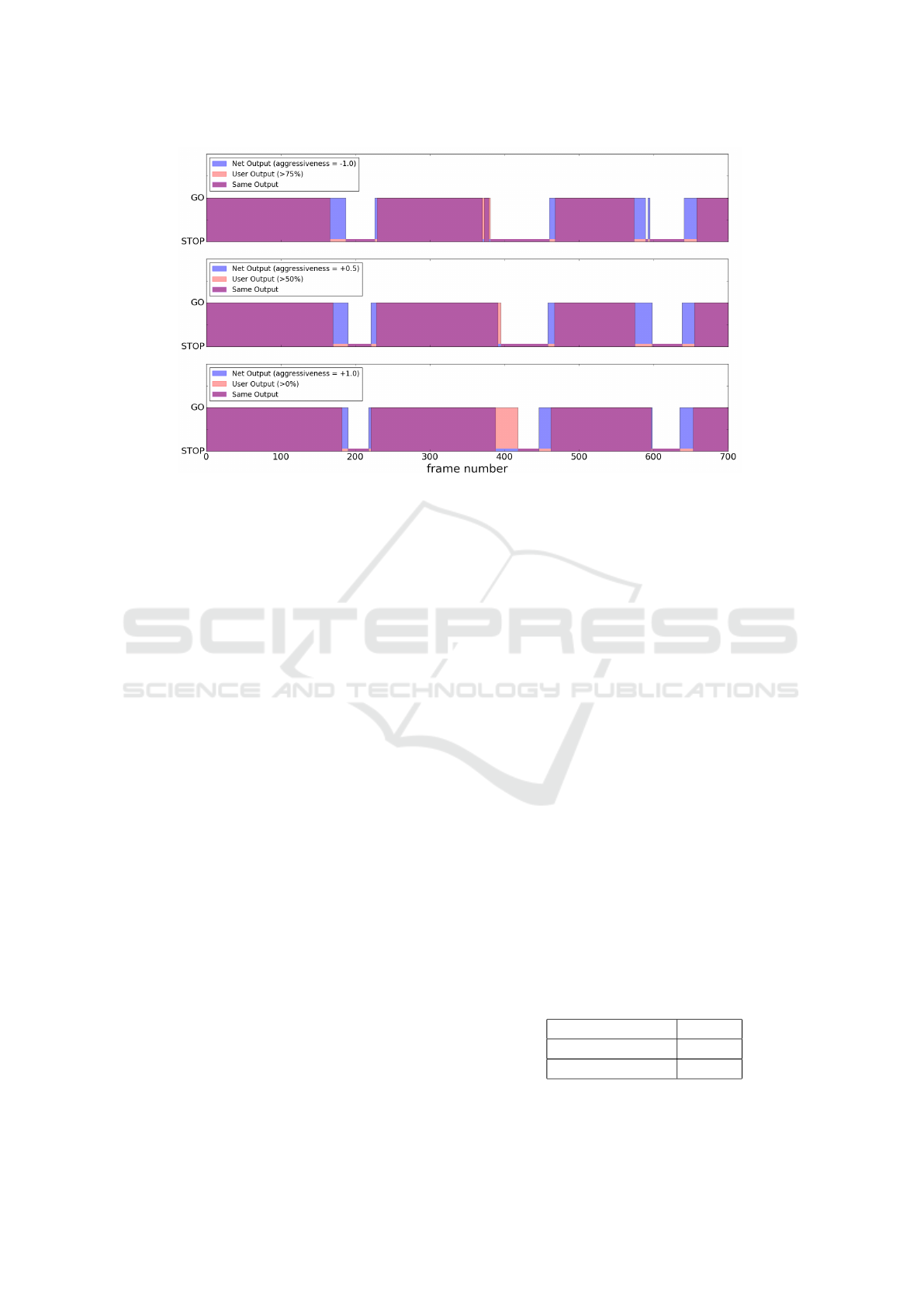
Figure 7: Comparison between the output of D-A3C module and those of the users for the first 700 frames (out of 2000).
The blue and the red areas correspond to the decisions of our system and the users choices respectively, while the violet ones
represent the frames in which the users and the net perform the same actions.
4.6 Test on Real Data
We evaluated our module with real data record-
ing both around 2000 perception frames and video
streams of the roundabout of Figure 1a with a car
equipped with a stereo camera and a GPS. We pro-
jected the recorded traffic into our synthetic envi-
ronment and performed a test with three different
aggressiveness levels of the net (−1.0, +0.5, +1.0).
These values represent different driving styles, from
the most cautious to the most impetuous; since in Sec-
tion 4.3 we noticed that the behavior of the system is
coherent also for values outside the range used during
the training, we chose −1.0 to accentuate the cautious
behavior.
The frames have been recorded with the car stopped at
the stop line and therefore also the agent in our syn-
thetic environment took its decisions from the same
point. However, in this way it is possible to evaluate
the single-shot insertion but not the full capabilities
of the system. In order to compare these results with
human decisions, we developed a simple interface in
which users, watching the real recorded sequences,
have to choose when to enter in the roundabout and
when to stay stop. However, since the output of our
system is a prediction of three possible states (Per-
mitted, Not Permitted and Caution), we modeled the
Caution state as Not Permitted to make a correct com-
parison between users and D-A3C model actions.
We stored the decisions of 10 users and we set up a
counter for each frame, representing the number of
users that would perform the entry in the roundabout
at that time, such that its value ranges from 0 to 10.
We created three different artificial user profiles based
on these counter values: the first one in which the en-
try is performed if at least the 75% of the users would
enter in the roundabout, the second one with this ratio
equal to 50% and the last one in which at least one
user (>0%) would enter in the roundabout. These
percentages represent three different human driving
styles such that we could compare them with the dif-
ferent aggressiveness levels of the net explained pre-
viously. Figure 7 illustrates the comparison between
the actions of our module (blue) and those of the users
(red) in each of the three profiles. Moreover, Table 4
shows the average match percentages over the three
video sequences between the first, the second and the
third user profile with the results obtained setting the
aggressiveness level of our system to −1.0 (Compar-
ison #1), +0.5 (Comparison #2) and +1.0 (Compari-
son #3) respectively. Since the match percentages be-
tween different single user decisions range from 80%
to 95%, we can observe that the results achieved in
Table 4 represent a good match between our module
output and human decisions.
Table 4: Average match percentages between user profiles
and D-A3C model actions over the three video sequences.
Comparison #1% 81.288
Comparison #2% 84.389
Comparison #3% 84.515
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
384

5 CONCLUSION
In this paper we presented a decision-making mod-
ule able to control autonomous vehicles during round-
about insertions. The system was trained inside a
synthetic representation of a real roundabout with a
novel implementation of A3C which we called De-
layed A3C; this representation was chosen so that
it can be easily reproduced with both simulated and
real data. The developed module permits to execute
the maneuver interpreting the intention of the other
drivers and implicitly negotiating with them, since
their simulated behavior was trained in a cooperative
multi-agent fashion.
We proved that D-A3C is able to achieve better learn-
ing performances compared to A3C and A2C by in-
creasing the exploration in the agent policies; more-
over, we demonstrated that negotiation and interac-
tion capabilities are essential in this scenario since a
rule-based approach leads to superfluous waits.
It also emerged that the decision-making module fea-
tures light generalization capabilities both for unseen
scenarios and for real data, tested by introducing noise
in the obstacles perception and in the trajectory of
agents. However, these capabilities should be en-
forced in future works for making the system usable
both in real-world and unseen scenarios.
Finally, we tested our module on real video sequences
to compare the output of our module with the actions
of 10 users and we observed that our system has a
good match with human decisions.
REFERENCES
Bacchiani, G., Molinari, D., and Patander, M. (2019).
Microscopic traffic simulation by cooperative multi-
agent deep reinforcement learning. Proceedings of the
18th International Conference on Autonomous Agents
and Multiagent Systems, AAMAS ’19, Montreal, QC,
Canada, 2019.
Bandyopadhyay, T. et al. (2012). Intention-aware motion
planning. WAFR.
Bansal, M., Krizhevsky, A., and Ogale, A. S. (2018). Chauf-
feurnet: Learning to drive by imitating the best and
synthesizing the worst. abs/1812.03079.
Behrisch, M., Bieker-Walz, L., Erdmann, J., and Kra-
jzewicz, D. (2011). Sumo – simulation of urban mo-
bility: An overview. Proceedings of SIMUL, 2011.
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. Journal of the Ameri-
can Podiatry Association, 60:6.
Boehm, W. and M
¨
uller, A. (1999). On de casteljau’s algo-
rithm. Computer Aided Geometric Design.
Codevilla, F. et al. (2017). End-to-end driving via condi-
tional imitation learning.
Dosovitskiy, A. et al. (2017). Carla: An open urban driving
simulator. CoRL.
Franc¸ois-Lavet, V. et al. (2018). An introduction to deep
reinforcement learning. Foundations and Trends
R
in
Machine Learning, 11(3-4):219–354.
Goodfellow, I., Bengio, Y., and Courville, A.
(2016). Deep Learning. MIT Press.
http://www.deeplearningbook.org.
Gupta, J., Egorov, M., and Kochenderfer, M. (2017). Coop-
erative multi-agent control using deep reinforcement
learning. pages 66–83.
Hatipoglu, C., Ozguner, U., and Sommerville, M. (1996).
Longitudinal headway control of autonomous vehi-
cles. Proceeding of the 1996 IEEE International Con-
ference on Control Applications, pages 721–726.
Hoel, C., Wolff, K., and Laine, L. (2018). Automated
speed and lane change decision making using deep re-
inforcement learning. 2018 21st International Confer-
ence on Intelligent Transportation Systems (ITSC).
Isele, D. et al. (2018). Navigating occluded intersections
with autonomous vehicles using deep reinforcement
learning. 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 2034–2039.
Liu, W., Kim, S., Pendleton, S., and Ang, M. H. (2015).
Situation-aware decision making for autonomous
driving on urban road using online POMDP. 2015
IEEE Intelligent Vehicles Symposium (IV).
Mnih et al. (2015). Human-level control through deep rein-
forcement learning. Nature, 518:529–33.
Mnih, V. et al. (2016). Asynchronous methods for deep
reinforcement learning. Proceedings of the 33nd In-
ternational Conference on Machine Learning, ICML
2016, New York City, NY, USA, June 19-24, 2016.
Ong, S. C. W., Png, S. W., Hsu, D., and Lee, W. S.
(2010). Planning under uncertainty for robotic tasks
with mixed observability. The International Journal
of Robotics Research, 29(8):1053–1068.
Packard, K. and Worth, C. (2003-2019). Cairo graphics li-
brary.
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for data: Ground truth from computer games.
abs/1608.02192.
Shalev-Shwartz, S., Shammah, S., and Shashua, A. (2016).
Safe, multi agent, reinforcement learning for au-
tonomous driving. abs/1610.03295.
Song, W., Xiong, G., and Chen, H. (2016). Intention-
aware autonomous driving decision-making in an un-
controlled intersection. Mathematical Problems in
Engineering, 2016:1–15.
Spaan, M. T. J. (2012). Partially observable markov deci-
sion processes. Reinforcement Learning: State-of-the-
Art, pages 387–414.
Sutton, R. S. and Barto, A. G. (2018). Introduction to Rein-
forcement Learning. MIT Press.
van der Horst, A. and Hogema, J. H. (1994). Time-to-
collision and collision avoidance systems. ICTCT
Workshop Salzburg.
Wu, Y. et al. (2017). Openai baselines: ACKTR & A2C.
Intelligent Roundabout Insertion using Deep Reinforcement Learning
385
