
A Unified Design & Development Framework
for Mixed Interactive Systems
Guillaume Bataille
1,2 a
, Val
´
erie Gouranton
2
, J
´
er
´
emy Lacoche
1
, Danielle Pel
´
e
1
and Bruno Arnaldi
2
1
Orange Labs, Cesson S
´
evign
´
e, France
2
Univ Rennes, INSA Rennes, Inria, CNRS, IRISA, France
Keywords:
Human-Machine Interaction, Mixed Reality, Natural User Interfaces, Internet of Things, Cyber-Physical
Systems, Hybrid Interactive Systems, Mixed Interactive Systems.
Abstract:
Mixed reality, natural user interfaces and the internet of things are complementary computing paradigms.
They converge towards news form of interactive systems named mixed interactive systems. Because of their
exploding complexity, mixed interactive systems induce new challenges for designers and developers. We
need new abstractions of these systems in order to describe their real-virtual interplay. We also need to break
mixed interactive systems down into pieces in order to segment their complexity into comprehensible sub-
systems. This paper presents a framework to enhance the design and development of these systems. We
propose a model unifying the paradigms of mixed reality, natural user interfaces and the internet of things.
Our model decomposes a mixed interactive system into a graph of mixed entities. Our framework implements
this model, which facilitates interactions between users, mixed reality devices and connected objects. In order
to demonstrate our approach, we present how designers and developers can use this framework to develop a
mixed interactive system dedicated to smart building occupants.
1 INTRODUCTION
In this paper, we aim to enhance the design and devel-
opment of interactive systems blending the paradigms
of mixed reality (MR), natural user interfaces (NUI)
and the internet of things (IoT). These systems are
called mixed interactive systems (MIS) (Dubois et al.,
2010). They offer new ways for humans to interact
with their environment. MR synchronizes real and
virtual worlds and permits to simultaneously interact
with them. NUI use the human body as an interface
in order to grant natural and intuitive interactions with
digital technologies. The IoT supports and improves
ubiquitous interactions with everyday things. These
paradigms are converging in order to bridge the gap
between real and virtual. NUI combined with the IoT
are common in our everyday lives. As an example,
voice assistants are becoming mainstream products.
Combined with MR, NUI mediate our indirect inter-
actions with real entities. For example, we can control
a virtual brush by gesture in order to control a paint-
ing robot. Beyond the coupling of NUI and the IoT,
MR can inform us about the mixed objects surround-
ing us and mediate our interactions with the IoT. MR
could inform us of a broken part of a smart car, how to
a
https://orcid.org/0000-0002-6751-3914
repair it and help us to order the required spare parts
and tools that we are missing.
Blending these domains is still in its infancy and
limited to prototypes and proofs of concept. Current
techniques like tracking or object recognition bound
this convergence. However, the limitations of this
convergence are also due to a lack of dedicated tools.
We need to drive the production of MIS from hand-
made prototypes towards industrial processes. As a
contribution, we present in this paper a framework
to design and develop MIS. We base this framework
on our unified model that we name as the design-
oriented mixed-reality internal model (DOMIM). Our
DOMIM-based framework offers design and develop-
ment tools to create these systems. Its benefits are
simplicity, reusability, flexibility, and swiftness.
In the next section, we present MR, NUI and the
IoT, and work related to hybrid interactions blending
these domains. The third section presents our unified
model and our resulting framework based on it. The
fourth section describes the development of a scenario
with our framework to validate our approach. This
use case is an MIS for smart building occupants. The
last section concludes this paper.
Bataille, G., Gouranton, V., Lacoche, J., Pelé, D. and Arnaldi, B.
A Unified Design Development Framework for Mixed Interactive Systems.
DOI: 10.5220/0008913800490060
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
49-60
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
49

2 RELATED WORK
In this section, we first define MR, NUI, and the IoT
as research domains. Then we present work related to
hybrid interactive systems blending these domains.
MR, NUI and the IoT
Mixed Reality (Milgram and Kishino, 1994) is pro-
vided for Coutrix et al. by mixed reality systems com-
posed of mixed objects (Coutrix and Nigay, 2006).
A mixed object is composed of a real part described
by its physical properties, and a digital part described
by its digital properties. A loop synchronizes both
parts, as presented in figure 1. Current technologies
bound this synchronization. They restrict the cap-
ture of physical properties and the actuation of digital
properties.
physical
object
physical
properties
digital
object
digital
properties
acquired physical data
generated physical data
mixed object
digital
properties
physical
properties
Figure 1: Based on (Coutrix and Nigay, 2006) this figure
presents how mixed objects synchronize both their real and
virtual properties.
Natural User Interfaces exploit the human body as an
interface. They address skills that humans acquired
while interacting with the real world (Blake, 2012).
NUI mediate interactions between humans and the
virtual by mimicking interactions between humans
and their real environment. Sensors track human
activity, while actuators render virtual properties
(Liu, 2010). The main interaction modalities used
by NUI are vision, voice recognition and synthesis,
touch, haptics, or body motion. For example, users
can command voice assistants by speech in order
to listen to music, or manipulate a virtual object by
captured gestures. NUI provide what we call in this
paper pseudo-natural interactions since they partially
succeed in reproducing the interactions between
humans and the real world (Norman, 2010). A key
factor of a NUI success is its short learning curve due
to its intuitiveness.
The Internet of Things is defined by Atzori et al. (At-
zori et al., 2017) as “a conceptual framework that
leverages on the availability of heterogeneous devices
and interconnection solutions, as well as augmented
physical objects providing a shared information base
on global scale, to support the design of applications
involving at the same virtual level both people and
representations of objects.”. The IoT connects the
physical and digital worlds and transduces their prop-
erties in order to interact with humans (Greer et al.,
2019). Diverse network services and protocols, like
the Zwave protocol, enable and normalize their net-
work communications. Grieves introduced in 2002
the digital twin concept in the smart and connected
product systems context, as part of the internet of
things (Grieves, 2019). A digital twin is a digital
clone of a real product, its physical twin. Both twins
are interconnected (Glaessgen and Stargel, 2012) in
order to provide supervision and control of the physi-
cal twin to manufacturers and users(Grieves, 2019).
Hybrid Interactions
Researchers have created hybrid interactions combin-
ing MR, NUI, or the IoT for over a decade. In related
work we found several non-reusable prototypes melt-
ing MR, NUI, and the IoT. We also found models and
frameworks related to MIS. The complexity of MIS
requires the use of models and tools in order to sup-
port their design and development.
Non-reusable Prototypes
Petersen et al. (Petersen and Stricker, 2009) studied
the continuous synchronization of virtual and real by
using NUI. Mistry et al. developed Sixthsense (Mis-
try and Maes, 2009) to augment the real world with
digital content. They use gestures to interact with the
content. Rendering is provided by spatial augmented
reality (SAR). Sulisz et al. combined AR and smart
devices to support mobile users’ interactions (Sulisz
and Seeling, 2012). Lin et al. developed Ubii to
pseudo-naturally interact with real objects in AR (Lin
et al., 2017). Using GUI limits the naturalness of their
interactions. Their main interest is to allow distant in-
teractions between devices in the user neighborhood.
These interactions require scanning the RFID tag of
objects on a short-range. This constraint also limits
the naturalness of these interactions. Kritzler et al.
extended the concept of digital twins to virtual twins
as interactive renderings of industrial objects in or-
der to control smart factories (Kritzler et al., 2017).
Normand et al. (Normand and McGuffin, 2018) en-
larged a smartphone screen with a video see-through
device. This device renders around a smartphone its
virtual properties. It also allows pseudo-natural inter-
actions by in-air gestures with these properties. Mann
et al. presented the concept of All Reality (Mann
et al., 2018) which blends mixed reality and sensors
in order to augment humans-objects interaction. Kim
et al. studied user interactions with a voice assistant
mediated by an embodied virtual agent (Kim et al.,
2018). Norouzi et al. (Norouzi et al., 2019) surveyed
the merging between autonomous agents, the IoT and
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
50

Table 1: Comparison between interactive systems blending MR, NUI or the IoT under the prism of models and frameworks.
Work real/virtual real/virtual MR devices natural interactions flexibility
synchronization decorrelation templates library
MacWilliams et al. 2003 yes yes no no static
Kelaidonis et al. 2012 yes yes no no dynamic
Dubois et al. 2014 yes yes no no dynamic
Nitti et al. 2016 yes yes no no no
Bouzekri et al. 2018 yes no no no no
Pfeiffer et al. 2018 simulated simulated no no no
Lacoche et al. 2019 yes yes no no static
augmented reality (AR). This is an anthropomorphic
trend of the convergence between MR, NUI, and the
IoT. But virtual agents are - in these cases - virtual
mediators. They do not complete the mediated ob-
ject itself with a rendered virtual part. These works
were also handmade and produced non-reusable pro-
totypes.
Models and Frameworks
Multi-agent models aim at factoring a system into a
collection of components: the agents. MVC (Model-
View-Control) and PAC (Presentation-Abstraction-
Control) separate the functional and visual/interaction
features of interactive systems (Hussey and Carring-
ton, 1997). However, they both fail in describing
low-level aspects of human-machine interaction and
in decorrelating real and virtual.
MIS are mainly studied under the convergence of
ubiquitous computing, tangible user interfaces, and
MR. MacWilliams et al. (MacWilliams et al., 2003)
presented a development framework for interactive
systems mixing AR, ubiquitous and wearable com-
puting and tangible user interface called DWARF.
While this system did not provide a generic model
unifying all these domains through the real/virtual in-
terplay, software templates or a natural interactions
library, it provided tools to support the design and de-
velopment phase of an MIS. Jacob et al. (Jacob et al.,
2008) presented a set of thematic guidelines in order
to study MIS interactions but no generic architecture
or development tools dedicated to MIS. Dubois et al.
(Dubois et al., 2014) presented a model-based MIS
development framework. However, this framework
does not consider all entities composing an MIS as
mixed entities or the interplay of mixed entities inter-
acting in both real and virtual worlds. Kelaidonis et
al. (Kelaidonis et al., 2012) presented a framework to
virtualize real objects and manage the interplay with
their virtual part in the IoT context. Nitti et al. sur-
veyed virtual objects in the IoT (Nitti et al., 2016)
and presented a generic virtualization architecture.
However, they do not cover natural user interactions.
Bouzekri et al. presented a generic architecture for
cyber-physical systems (Bouzekri et al., 2018) which
considers users, interfaces, communications, software
including behavioral models and hardware. They pro-
vide an architecture that may be adapted to MR, NUI
and the IoT but does not precisely model behaviors or
decorrelate real and virtual. Pfeiffer et al. presented
their approach to design in VR mixed interactive sys-
tems (Pfeiffer and Pfeiffer-Leßmann, 2018). But their
approach is limited to the design of simulated MIS
systems. They do not provide any model to easily
deploy the simulation results in a real environment.
Lacoche et al. presented a PAC model to simulate and
develop smart environments (Lacoche et al., 2019).
But this model does not cover natural user interac-
tions.
The Table 1 compares related work relative to in-
teractive systems mixing MR, NUI or the IoT and
their contribution to unified models or frameworks.
Related Work Analysis
In conclusion, merging MR, NUI and the IoT in these
works simplifies user interactions. But they imple-
ment non-sustainable software in order to develop
proofs of concept and prototypes mixing these do-
mains. This software has a short lifetime with no
reusability, interoperability or potential support.
However, the complexity of MIS design and
development requires models and tools to support
them. Existing models, architectures and frameworks
may cover MIS design and development but do not
satisfy designers and developers’ need for generic
real/virtual synchronization and decorrelation, soft-
ware templates and natural interaction libraries. Tools
would help to design and develop MIS. However, new
tools require new models.
In this paper, we present our solution to these
problems.
A Unified Design Development Framework for Mixed Interactive Systems
51
3 THE DESIGN-ORIENTED
MIXED-REALITY INTERNAL
MODEL
A growing amount of interactive devices and con-
nected objects, the expanding volume of data to com-
municate, and a more accurate synchronization be-
tween real and virtual contribute to the increasing
complexity of mixed interactive systems (MIS). We
need to create abstractions, methods, and tools to sup-
port MIS developments. And we require new mod-
els to produce these tools. Our approach consists in
providing a common model for NUI, MR, and the
IoT. This model supports an MIS design from its ar-
chitectural design to its implementation. We, there-
fore, propose to name this model the design-oriented
mixed-reality internal model (DOMIM). This model
is implemented into a framework ready to use by de-
velopers. The resulting framework splits an MIS into
reusable application templates and components, pro-
viding simplicity, reusability, flexibility, and swift-
ness. We now describe our mixed entity model step
by step, then the relations between mixed entities, and
finally our framework based on this model.
3.1 Mixed Entities
MR, NUI and the IoT all mix virtual and real. MR
blends real and virtual from a user-centric point of
view. The IoT allows ubiquitous interactions between
humans and things through networks. NUI mediate
interactions between humans and virtual entities. We
need to define a transparent relation between the real
and the virtual, suitable for all MR, NUI, and the IoT.
In order to define such a relation, we need a unified
model for these domains. We first extend the Coutrix
et al. (Coutrix and Nigay, 2006) model of a mixed
object, as shown in Figure 1, to both living and non-
living entities. This allows us to model users, inter-
faces, and objects with a single model. Figure 2 de-
scribes the mixed entity model. This model is useful
to decorrelate and synchronize the virtual and the real
properties of a mixed entity. This decorrelation allows
to observe or control how these properties evolve sep-
arately when they are not synchronized and comple-
mentarily when they are. Their synchronization re-
quires sensors, actuators, and infrastructures to sup-
port and communicate virtual properties. A real and a
virtual part compose mixed entities. A loop synchro-
nizes these parts. This loop translates a subset of the
real properties of an entity into virtual ones and vice
versa. As an example, we consider humans behaving
in a mixed building. The real building itself is its real
part. Interconnected sensors like cameras, actuators
like smart plugs, and controllers like computers com-
pose the real interaction loop of this mixed building.
The virtual twin of a mixed building is its virtual part.
This virtual part mirrors the real presence of objects
and humans in the building. Turning on the virtual
twin of a mixed fan will turn on the real fan.
real part
virtual part
mixed entity
virtual
properties
real
properties
Figure 2: The mixed entity external model synchronizes the
properties of the real and virtual parts of a mixed entity.
Completing the Mixed Entity Model
DOMIM combines the mixed entity model with the
perception-cognition-action loop, in order to model
the capability of each part to behave. Mixed en-
tities can behave in both real and virtual environ-
ments. Typically, smart objects (S
´
anchez L
´
opez et al.,
2012)(Poslad, 2011) synchronize their virtual and
real behaviors in real-time. We present our result-
ing model in Figure 3. The internal interactions of
a mixed entity occur:
• inside each part of a mixed entity. Sensors, actua-
tors, and controllers capture, transmit and process
the properties of the mixed entity,
• between the parts of a mixed entity. They syn-
chronize and complete their knowledge and be-
havior in order to generate a mixed behavior.
mixed action
real effector
mixed perception
real sensor
virtual effectorvirtual sensor
real part
virtual part
mixed entity
real
properties
virtual
properties
real
properties
real properties
virtual
properties
virtual properties
mixed control
real controller
virtual controller
real
properties
virtual
properties
Figure 3: Our design-oriented mixed-reality internal model
of a mixed entity, composed of two synchronized interac-
tions loops.
Real sensors capture the properties of the real
world, for example, cameras. Real controllers execute
applications, in order to process the real properties
captured. For example, a real controller can rely on an
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
52

algorithm that would detect the location of the mixed
entity. Real effectors act on real properties. Typically,
a smart plug can switch on/off a lamp. Virtual sensors
capture virtual properties. For example, a real pres-
ence sensor perceives humans in its neighborhood,
while a virtual one perceives humanoid presence in
its virtual neighborhood. Virtual controllers process
virtual properties, like an algorithm in charge of pro-
cessing the semantics of a received message. Virtual
effectors modify virtual properties. For example, a
virtual brush can paint a virtual space. When devel-
oped, these components are added to the DOMIM ap-
plication templates in order to reuse them.
Mixed entities may self-support the communica-
tion between their real and virtual parts. They are
in this case active mixed entities. This is the case
of vacuum robots. These robots can perceive their
environment with sensors and reconstruct it in 3D
with simultaneous location and mapping (SLAM) al-
gorithms (Leonard and Durrant-Whyte, 1991)(Marc-
hand et al., 2016). Passive mixed entities need envi-
ronmental sensors and controllers in order to maintain
their virtual part. They cannot synchronize their real
and virtual parts without the IoT. Mixed humans hy-
bridize the notions of avatar and agent. Their avatar
clones their skeleton movement and position. When
non-synchronized, the virtual part of mixed humans
can behave as an autonomous agent. For example, the
virtual part of a sleeping person can turn off a TV. The
virtual part of mixed users is supported either by the
NUI they use or their connected environment, in or-
der to interact with their environment. The real part
of mixed users can also interact with the real part of
their environment.
DOMIM enables the coexistence between real and
virtual. With DOMIM, the real can affect the virtual
and vice versa. In the next subsection, we describe
the relations between the mixed entities constituting
an MIS.
3.2 Interactions between Mixed Entities
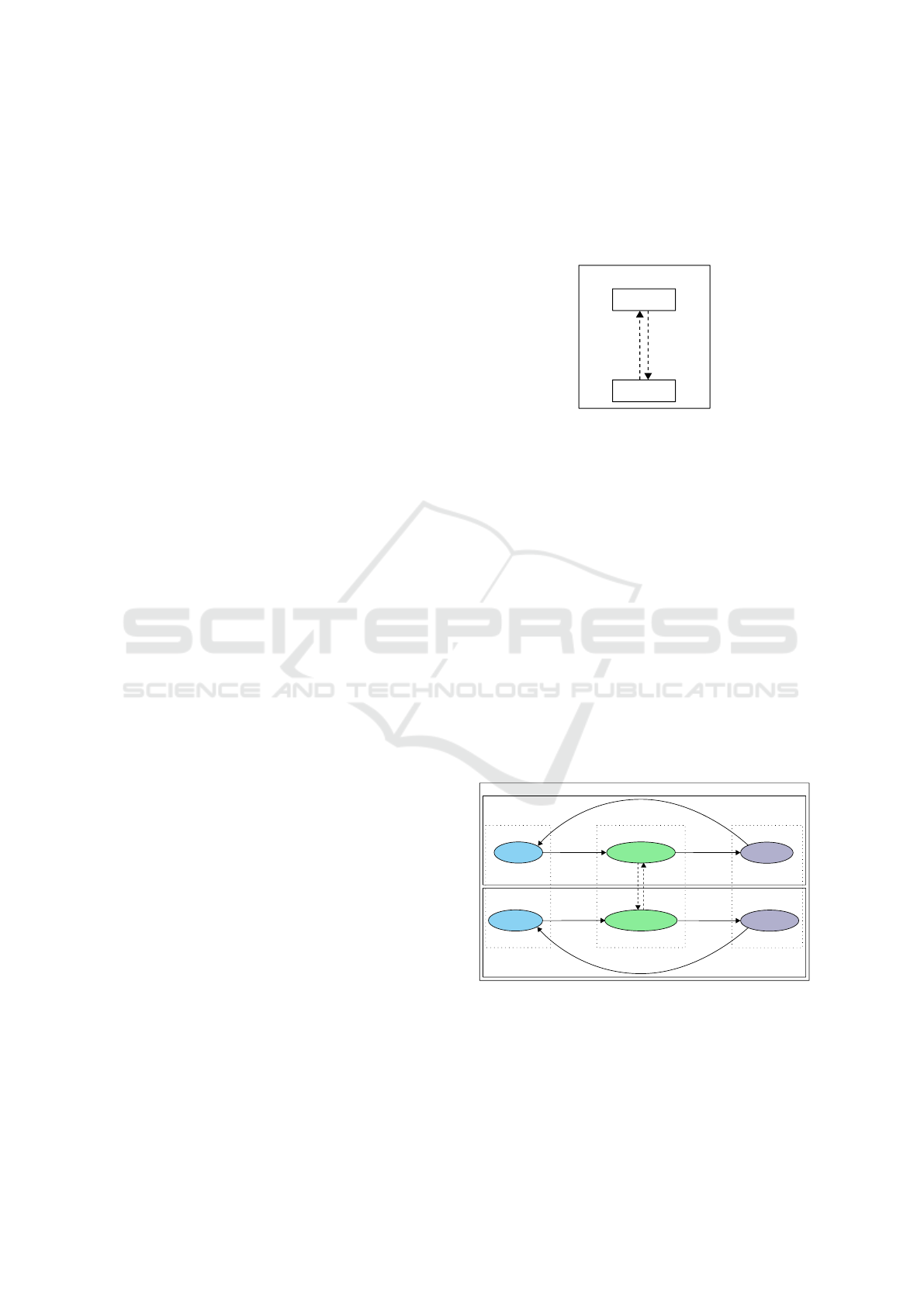
The user-interface-environment interaction graph de-
scribed in Figure 4 shows our approach to the interac-
tions occurring between the entities of an MIS. Mixed
entities interact externally through natural, pseudo-
natural and virtual world interactions in such systems,
as shown in Figure 5:
• between the real part of mixed entities: natural,
pseudo-natural or network interactions,
• between the virtual part of mixed entities: virtual
world interactions.
user
mixed
reality
internet
of
things
interface
environment
natural
user
interface
natural interactions
pseudo-natural
interactions
virtual world
interactions
Figure 4: Mixed Reality, Natural User Interfaces and the
Internet of Things interaction graph presents the different
types of interaction involved and how they complete each
other in MIS.
r
c
real part
mixed entity 1
r
pp
v
pp
v
c
r
s
v
s
r
e
v
e
r
pp
v
pp
v
pp
r
pp
r
pp
v
pp
r
c
mixed entity 2
r
pp
v
pp
v
c
r
s
v
s
r
e
v
e
r
pp
v
pp
v
pp
r
pp
r
pp
v
pp
network
communications
(pseudo) natural
interactions
virtual world
interactions
virtual part
real part
virtual part
Figure 5: External and internal interactions in a system of
two mixed entities.
DOMIM allows designers and developers to:
• separate the constitutive entities of an MIS: this is
useful to design and architect an MIS,
• decorrelate the real and the virtual in order to de-
sign and implement their complementary interac-
tions,
DOMIM can support a simple modeling of mixed
humans, NUI, and connected objects and their inter-
actions as shown in section (4). Compared to refer-
ence interaction models like MVC or PAC, DOMIM
allows describing low-level aspects of interactions.
The resulting model is flexible since it allows to easily
reuse and adapt previous models and their implemen-
tation to other mixed entities. It is used by our frame-
work while designing, architecting and implementing
MIS. It is useful to break an MIS into pieces in order
to segment its complexity.
We now describe the DOMIM framework.
3.3 The DOMIM Framework
As previously mentioned, an MIS interconnects a
pool of mixed entities and can be considered as a dis-
tributed user interface. These interfaces allow users to
interact naturally and intuitively with the mixed en-
tities composing it. To produce such interfaces, our
DOMIM-based framework supports the development
of interconnected applications enabling the mixed en-
tities composing an MIS. Interconnected platforms
linked to devices by services constitute an MIS. Plat-
forms like the Hololens run these applications. Each
application implements one or more mixed objects.
An MIS typically requires connected objects man-
A Unified Design Development Framework for Mixed Interactive Systems
53
agement services. For example, one service controls
all the Zwave-compatible devices of an MIS. This
service can collect sensor events from the connected
devices and controls their actuators. It allows syn-
chronizing each application supporting a mixed entity
with its real part through the Zwave protocol. Simul-
taneously, a Hololens application supports both the
mixed user and the Hololens as a natural user inter-
face, a mixed interface.
Our framework requires Unity
1
. Extending sup-
ported development environments to the Unreal En-
gine or even an entirely dedicated development en-
vironment represents an important development cost
but is still feasible in order to provide a completely
independent solution to developers. Our framework
provides DOMIM-based application templates for
Windows and MR devices like Hololens or Android
smartphones supporting ARCore. These templates
are Unity 2018.3 projects containing:
• a Petri net editor. Our plugin integrates this edi-
tor to Unity (Bouville et al., 2015)(Claude et al.,
2015). Developers easily complete a pre-defined
Petri net by connecting the scene graph entities
and their components to it. It allows to design
software during implementation and is simpler
than coding, noticeably for designers,
• a generic implementation of the DOMIM model
as an editable Petri net. Developers complete this
Petri net in order to configure a mixed entity be-
havior by clicking on buttons and drop-down lists,
• pre-developed network and natural interaction
components. Developers easily associate these
components with the mixed entities composing
the scene graph thanks to our Petri net editor.
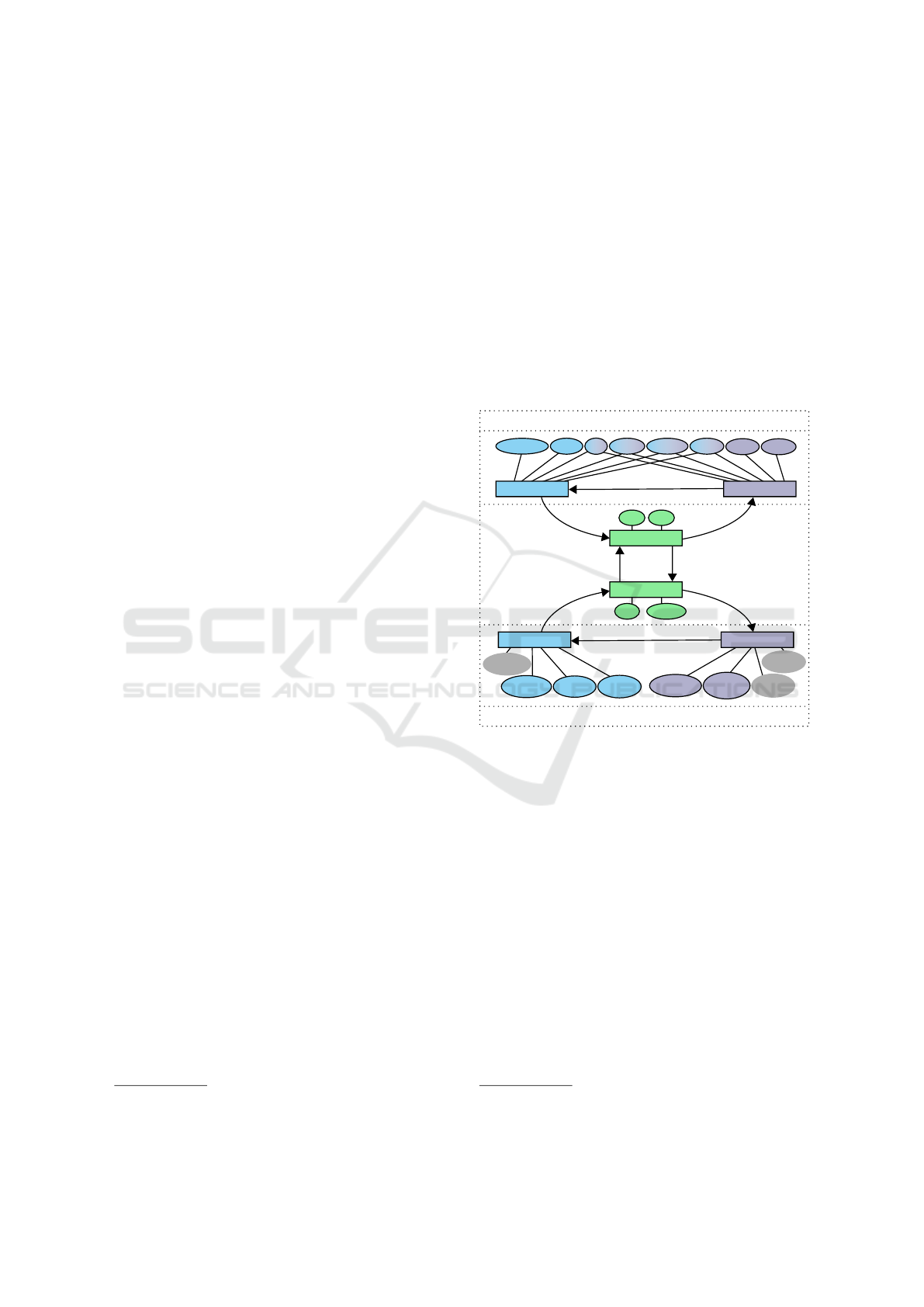
Our DOMIM-based application templates provide
components shown by Figure 6. We provide pre-
developed gesture recognition components like gaze
and tap gesture, the tangible touch of virtual ob-
jects, and hybrid tangible, in-air and tactile interac-
tions with virtual objects. Our network synchroniza-
tion components enable the synchronization of mixed
entities’ properties. Mixed entities are interconnected
in order to produce distributed interactions or syn-
chronize their location. We provide a Zwave service
and based on the Zwave .NET library
2
. Other IoT
services are under development, as a service based
on the LoRa protocol. The semantic analysis com-
ponent parses the network messages received by a
DOMIM-based application. The semantic descrip-
tion component formats the network messages sent
1
https://unity.com/fr
2
https://github.com/genielabs/zwave-lib-dotnet
by the application, typically to synchronize and dis-
tribute the MIS interface. For example, a mixed object
and a mixed user need to synchronize their location,
in order to interact in the virtual world. The seman-
tic components are crucial to normalize the network
communications between the mixed entities compos-
ing an MIS. This normalization allows interconnec-
tivity between MIS and consequently the scalability
of DOMIM-based MIS. The computer vision compo-
nent integrates transparently the Vuforia engine
3
or
an alternative AR middleware like ARToolKit
4
to our
interaction and colocation components. The Vufo-
ria engine is an AR development platform, providing
vision-based pose estimation algorithms.
voice
recognition
computer
vision
gesture
recognition
semantic
analysis
voice
synthesis
haptic
planning
semantic
description
computer
rendering
virtual sensor virtual effector
CPU
real controller
GPU
virtual controller
script
Petri net
microphone
camera Hololensandroidwifi
ZWave
speaker
display
real sensor real effector
virtual world
real world
real interface
mixed entity
virtual interface
Figure 6: This Figure is a detailed version of the Figure 3.
Our DOMIM-based framework provides non-greyed com-
ponents. They are available in DOMIM application tem-
plates and easy to connect to the scene graph thanks to our
Petri net editor.
We call a Petri net configuration a scenario. A
generic DOMIM scenario implements a DOMIM-
based mixed entity. This scenario separates the real
and virtual parts of the mixed entity, implements for
each part its interaction loop and synchronizes both
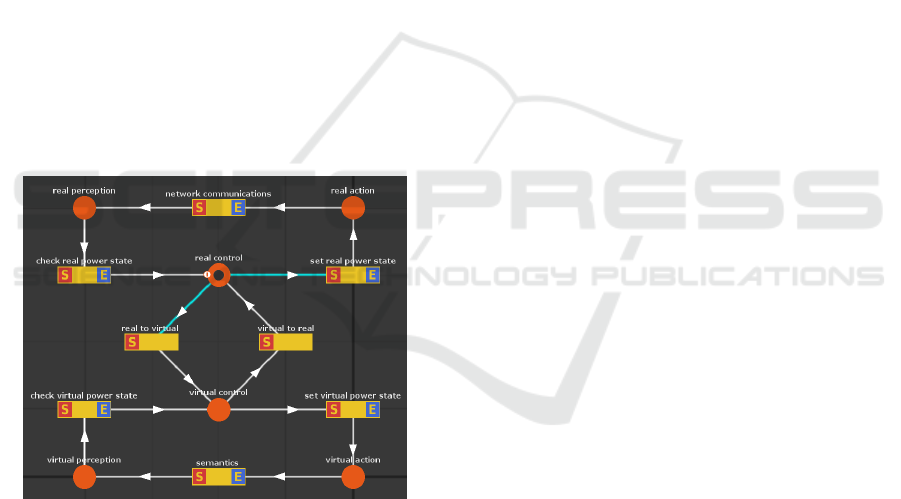
parts. Figure 7 shows in our Petri net editor a mixed
fan scenario based on a generic DOMIM scenario. A
real fan wired to a smart plug and an application make
up a mixed fan. The application controls the mixed
fan behavior. This scenario runs on the Hololens. De-
velopers assign object-oriented methods or properties
of the components to the generic scenario transitions.
These components belong to the mixed entities of the
Unity scene graph:
3
https://developer.vuforia.com/
4
https://github.com/artoolkit
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
54
• set real power state: updates the real fan proper-
ties from the virtual ones by calling a method of
the mixed fan if the user switched the virtual but-
ton of the mixed fan,
• network communication: commands the Zwave
server to update the real fan state according to its
real properties, this commands the smart plug of
the mixed fan,
• check real power state: asks the Zwave server the
real fan state to update the real properties of the
mixed fan, this checks the power state of the smart
plug,
• set virtual power state: this transition effector
calls a method of the mixed fan. This method up-
dates the virtual fan properties with the real ones,
• semantics: parses messages received from other
mixed entities of the MIS, formats the messages to
send to these entities, for example, to synchronize
their locations,
• check virtual power state: observes if the virtual
properties of the mixed fan have changed if the
mixed user interacted with the virtual power but-
ton of the mixed fan.
Figure 7: The Petri net scenario of a mixed fan, provided by
our Petri net editor. Orange circles are places. Yellow boxes
are transitions, the E letter indicates a transition effector, the
S letter indicates a transition sensor. The black dot is the
token at its initial place.
The process we just described is the same for
any MIS application. Developers apply this pro-
cess to all their MIS applications with the support
of our DOMIM-based framework. They declare the
properties of each mixed entity. They associate net-
work components with them and tune their commu-
nications with other mixed entities composing the
MIS. They provide each mixed entity with a 3D
model, their virtual twin eventually completed by
metaphors as the geometry of their virtual part, and
their DOMIM-based behavior description. Finally,
they associate each mixed entity with interaction tech-
niques.
DOMIM simplifies the design and development of
an MIS. It allows breaking an MIS into comprehen-
sible parts. It distinguishes the entities constituting
it, classifies their interrelations and spells their inter-
nal real-virtual interplay out. It allows reusing soft-
ware by splitting it into reusable and generic com-
ponents. Our DOMIM-based framework provides
an integrated design and development tool in order
to make flexible pre-developed application templates
and components. Our framework also provides pre-
developed software in order to accelerate the design
and development of an MIS, bringing swiftness to the
development of complex interactive systems.
4 USE CASE IMPLEMENTATION
Our validation use case consists of an MIS for smart
building occupants. We chose this context since a
building contains a large number of disparate con-
nected objects. In this building, humans interact with
a fan, a lamp, a thermometer, and a presence detec-
tor. We assume that objects are stationary. They are
tracked by detecting the pose of a texture whose lo-
cation is pre-defined in the building virtual twin. We
model rooms and objects offline by hand for rendering
performance reasons. This use case aims at control-
ling and monitoring mixed objects inside or outside
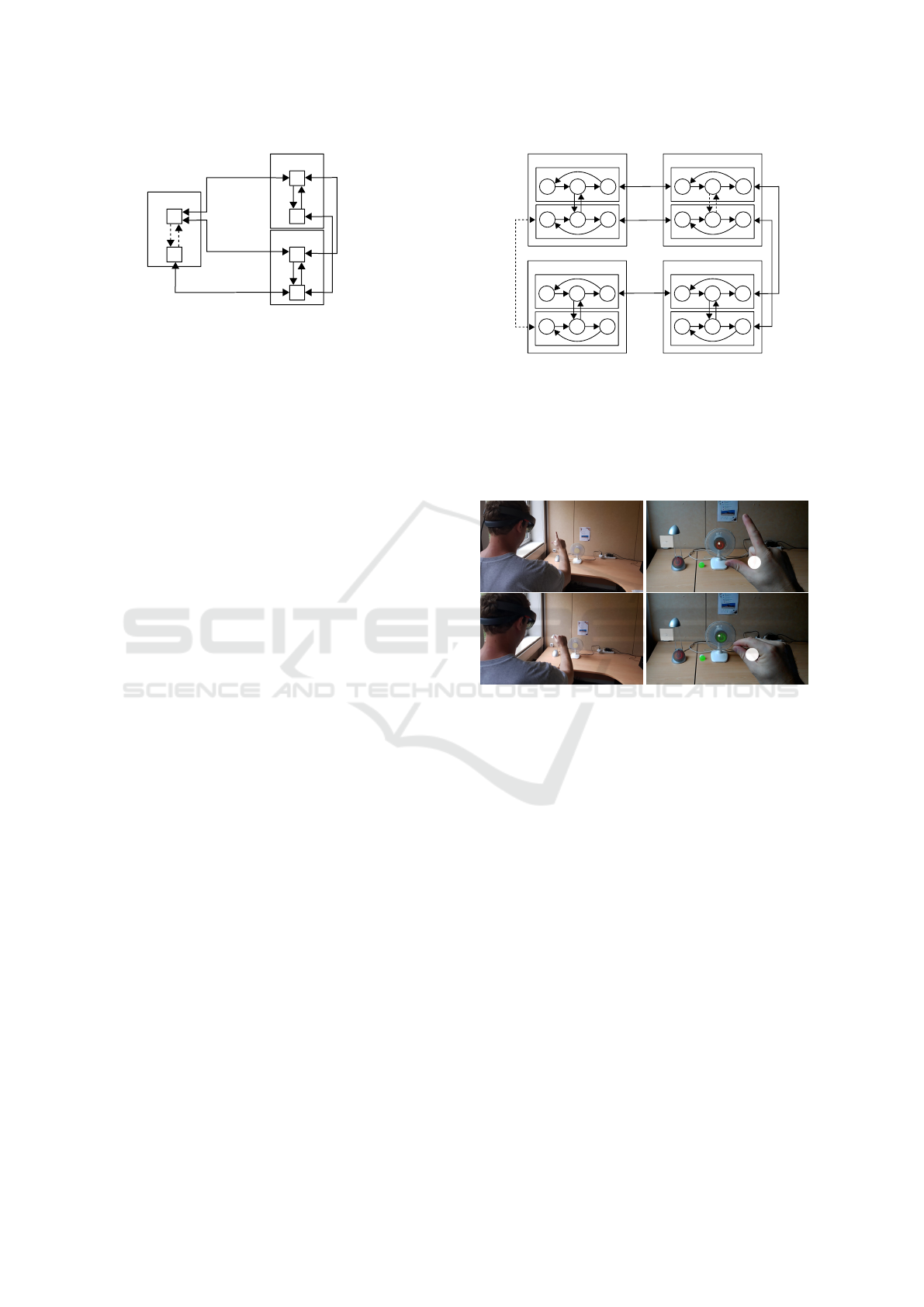
the building. We propose the following interactions:
• inside a room:
– interaction A, in-air gestures: an air tap gesture
turns on and off the power of the fan and the
lamp. We first focus on an object with head
gaze, then validate our action with the tap ges-
ture. Figure 13 shows this interaction. This
interaction validates the capability of DOMIM
to model an MIS using in-air gestures to inter-
act in real-time with smart objects surrounding
the user. It also validates the capability of our
DOMIM-based framework to implement in-air
gestures and interpret them to command mixed
objects,
– interaction B, tangible interactions: the simul-
taneous touch of both their real and virtual parts
turns on and off the power of the fan and the
lamp. We touch with the index finger the virtual
button displayed by the Hololens on the surface
of the real fan to command it, as shown in Fig-
ure 14. Compared to previous interaction, this
A Unified Design Development Framework for Mixed Interactive Systems
55
implementation validates our framework capa-
bility to implement tangible interactions,
• outside the room, interaction C combines tangi-
ble, tactile and in-air gestures. We use a smart-
phone as a tangible and tactile device in associ-
ation with a Hololens for stereovision and in-air
gestures in order to:
– manipulate the virtual twin of a room repre-
sented as a world in miniature (WIM) (Alce
et al., 2017),
– turn on/off the fan and the lamp by touching the
smartphone screen, as shown in Figure 15.
Compared to previous interactions, this imple-
mentation validates our framework capability to
use a smartphone as a tangible interface in order
to implement and hybrid interaction mixing tangi-
ble, tactile and in-air gestural interactions,
We use DOMIM to design this use case and our
DOMIM-based framework to develop it in order to
validate our approach.
4.1 Design
We consider in this section the design of an MIS ar-
chitecture and its software. Regarding DOMIM, the
first step is to enumerate the entities composing the
setup, shown in Figure 8:
• a mixed user enabled by:
– a Hololens,
– a smartphone Xiaomi Mi8 supporting ARCore,
• a mixed room containing:
– an Alienware Area 51 running a Zwave server,
– network enablers:
∗ a Netgear R6100 wifi router to connect the PC,
the Hololens and the smartphone,
∗ a Z-Stick S2 Z-Wave USB antenna plugged to
the laptop, making it our ZWave gateway,
– mixed objects:
∗ a fan plugged into a Fibaro Wall Plug, switch-
ing it on and off,
∗ a lamp plugged into a Everspring AD142 plug,
switching it on and off,
∗ a Fibaro Motion Sensor, monitoring presence
inside the room,
∗ a Everspring ST 814 temperature/moisture de-
tector, monitoring them inside the room.
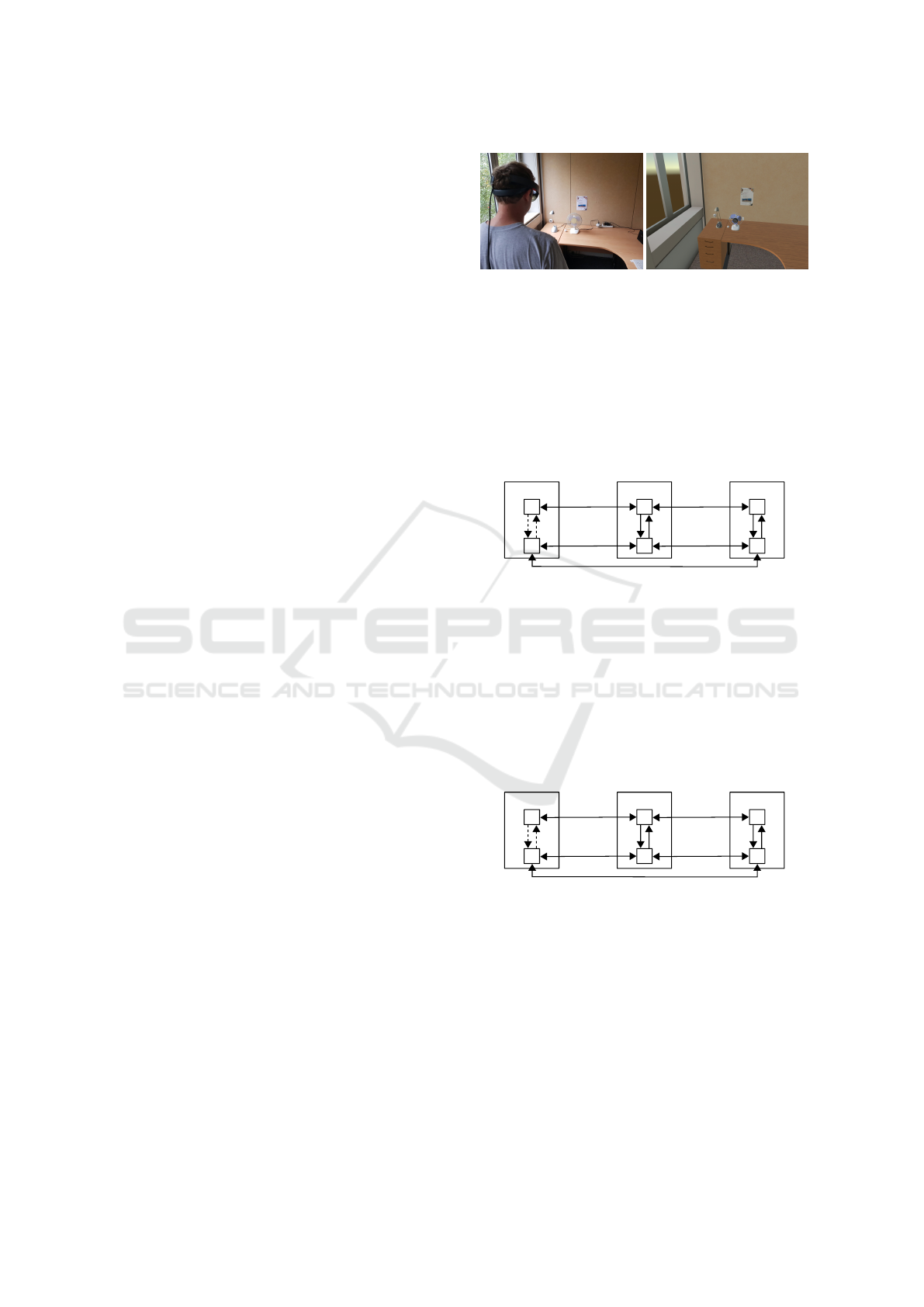
We now detail how our framework provides the
claimed services to designers.
Figure 8: On the left, a capture of the use case setup. On
the right, a capture of the room’s virtual twin.
Simplicity
DOMIM allows us to segment an MIS complexity
into several sub-MIS and to distinguish real and vir-
tual interactions between mixed entities. Figure 9
shows the sub-MIS composed of the mixed user, a
Hololens and the mixed fan. This MIS allows inter-
actions A and B. Interactions are clearly identified,
categorized and described.
mixed user
r
pt
v
pt
hololens
r
pt
v
pt
stereovision
gestures
virtual finger/virtual switch collision
mixed fan
r
pt
v
pt
virtual user
tracking
network
exchange
virtual
state
Figure 9: The external model based on DOMIM of the use
case subsystem composed of a user, a Hololens and a mixed
fan in the case of interaction B.
Flexibility
DOMIM eases the adaptability of an MIS to its evolu-
tions, thanks to its power of abstraction. For example,
the previous sub-MIS is abstract enough to replace a
Hololens by a Magic Leap, a mixed fan by a mixed
lamp, and a gesture interaction by a voice interaction
effortlessly, as shown in Figure 10.
mixed user
r
pt
v
pt
magic leap
r
pt
v
pt
stereovision
voice
voice command
mixed lamp
r
pt
v
pt
virtual user
tracking
network
exchange
virtual
state
Figure 10: Adapting the MIS presented in Figure 9 to an
MIS composed of a user, a Magic Leap and a mixed lamp,
with vocal interactions.
Reusability
We now present how to reuse an MIS external model.
The ability of DOMIM to produce simple and com-
prehensive models appears here. We extract from Fig-
ure 9 the mixed user, the Hololens and their interac-
tions. We complete this sub-MIS with a smartphone
in order to design interaction C, as described in Figure
11. Both smartphone and Hololens are self-located,
and their locations are synchronized.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
56
mixed user
r
pt
v
pt
user
tracking
tangible
tactile
hololens
r
pt
v
pt
smartphone
r
pt
v
pt
s
t
e
r
e
o
v
i
s
i
o
n
i
n
-
a
i
r
g
e
s
t
u
r
e
colocated
tracking
network
communications
Figure 11: Interaction C, the external model of a mixed
user enabled by a Hololens and an ARCore smartphone.
ARCore provides the location of the smartphone, while the
Hololens embeds its own SLAM in order to locate it.
The designed and implemented MIS validates the
use of DOMIM as a simple, flexible and reusable
model.
4.2 Implementation
Interactions inside each mixed entity application pro-
duce its behavior. This behavior enables its in-
teractions with other mixed entities composing the
MIS. Developers produce the applications support-
ing each mixed entity by using DOMIM applica-
tion templates and pre-developed components pro-
vided by the DOMIM framework. For each appli-
cation, developers create their mixed objects graph,
declare for each mixed entity its properties, locate
them in the virtual twin of the real space, and as-
sociate them with pre-developed pseudo-natural and
network interactions. Our network components pro-
vide inter-platforms communications and IoT-based
services like a ZWave service. Interaction com-
ponents offer pseudo-natural interactions, like in-air
gestures, described in this subsection and available as
components in our framework. Figure 12 presents the
relations between the mixed objects and devices of
our MIS. The Zwave server commands devices and
collects their real properties in order to synchronize
their virtual part. Typically, the virtual part of a mixed
fan knows if its real part is powered or not.
Interaction A: In-air Interactions with Mixed Ob-
jects. Our framework provides a DOMIM-based
application template for the Hololens. The mixed
user is supported by this application. The Hololens
perceives the mixed user location with its embedded
SLAM and tracks his hands with its depth camera. It
renders the virtual properties of the mixed objects sur-
rounding him as metaphors. It detects which mixed
object the mixed user observes with gaze tracking,
and the in-air tap gesture to switch on and off the
mixed object. When the Hololens detects the mixed
user intention to switch on and off a mixed object, it
semantics
CPU
wifi
wifi
r
pt
Zwave server
socket
v
pt
socket
ZWave
CPU
HPU
wifi
display
camera
r
pt
script
v
pt
hololens
semantics
physics
engine
command
support
wifi
power
r
pt
v
pt
connected plug
CPU
wifi
socket
socket
ZWave
r
pt
v
pt
mixed lamp
camera
CPU
script
physics
engine
virtual
light
power
network
network
power
switch
semantics
Figure 12: The internal model based on DOMIM of the use
case subsystem composed of a Hololens, a ZWave server, a
smart plug, and a lamp.
communicates to the Zwave server the command. The
Zwave server then switches on/off the smart plug of
the mixed object. Figure 13 presents the interaction
A.
Figure 13: Interaction A: in-air interactions with mixed ob-
jects. At the top, the user’s gaze focuses on the virtual
power button of the mixed fan. On the bottom, the user
uses the tap gesture to switch on the mixed fan.
Interaction B: Tangible Interactions with Mixed
Objects. This tangible interaction allows the mixed
user to switch on and off the smart plug of a mixed
object by touching it. The Hololens DOMIM-based
application detects the collision between the virtual
twin of the user’s hand and the virtual button aug-
menting the mixed object. The virtual button is dis-
played above the mixed object surface. When the user
touches the virtual button he also touches the real ob-
ject, making the virtual part of the mixed object tangi-
ble. The mixed user application developed for inter-
action A is modified by adding this virtual collision
detection as an interaction modality in order to com-
mand the mixed object. Figure 14 shows interaction
B, provided by our framework as a component.
This MIS implementation shows the capability of
our DOMIM-based framework to design and develop
MIS rapidly and efficiently.
A Unified Design Development Framework for Mixed Interactive Systems
57

Figure 14: Interaction B: tangible interactions with mixed
objects. At the top, the user is about to touch the virtual
power button of the mixed fan. On the bottom, the user
touches the virtual button in order to switch on the mixed
fan.
Interaction C: Hybrid In-air, Tangible and Tac-
tile Interactions with Tangible Virtual Objects.
This interaction combines two user interfaces, the
Hololens, and the smartphone. The smartphone is
used as a tangible and tactile interface, a tracking de-
vice and a tangible mediator of the virtual world sur-
faces but not as a visual rendering device. The smart-
phone allows to tangibly manipulate the virtual twin
of the room displayed on the smartphone by manipu-
lating the smartphone itself. Our framework provides
an application template for each device. The Hololens
is aware of its location thanks to its embedded SLAM
and of the location of the smartphone thanks to the
smartphone ARCore SLAM. The smartphone contin-
uously transmits its location to the Hololens. We syn-
chronize both coordinate systems when the Hololens
estimates the smartphone pose. The smartphone dis-
plays a texture. The Vuforia engine runs on the
Hololens. When Vuforia detects the texture on the
smartphone, it computes the transformation matrix of
the smartphone. We then estimate a transition ma-
trix with the help of this transformation matrix. This
transition matrix defines a common coordinate sys-
tem for both Hololens and smartphone locations. The
sum of the Hololens location and the smartphone pose
estimated by the Vuforia engine on Hololens is com-
pared to the smartphone location estimated by AR-
Core in order to provide this transition matrix. Our
framework provides this interaction as a component,
including the transition matrix estimation. When the
mixed user wants to interact with the virtual twin of
a mixed object, the Hololens detects his free hand lo-
cation and focuses on the closest virtual object twin.
When the mixed user touches the tactile screen of the
smartphone, the smartphone sends to the Hololens the
touch event. The Hololens then sends to the Zwave
service the command to the focused mixed object.
Our framework provides this Zwave service hosted by
a computer included in this MIS. We show interaction
C in Figure 15.
Figure 15: Interaction C: hybrid in-air, tangible and tactile
interactions with tangible virtual objects. At the top, the
user manipulates the smartphone in order to manipulate the
room’s virtual twin displayed by the Hololens, the virtual
twin of a mixed lamp is focused by his hand. On the bottom,
the user touches the smartphone tactile screen in order to
switch on the mixed lamp.
If we want to extend or change an MIS, we com-
plete or change the DOMIM implementation of de-
veloped mixed entities, and eventually add new mixed
entities based on DOMIM application templates and
tune their interactions with the MIS.
5 CONCLUSION
In this paper, we presented our solution for the de-
velopment of hybrid interactive systems blending
MR, NUI, and the IoT that we call mixed interac-
tive systems. Our approach responds to the need
for appropriate models and tools to abstract and de-
velop these complex systems. Our main contribution
is our design-oriented mixed-reality internal model
(DOMIM) of a mixed entity. This model supports
the architecture, design and implementation of MIS.
We used this model to produce our DOMIM-based
framework providing simplicity, reusability, flexibil-
ity, and swiftness. A DOMIM framework-based
project breaks an MIS into pieces in order to segment
its complexity, and highly structure and factor them.
Interactions between different platforms are provided
by network, which allows a a high interoperability of
DOMIM-based MIS. Our framework also allows to
design software during implementation.
For future work, first, our DOMIM-based frame-
work needs to be completed with additional interac-
tion techniques, devices, and IoT services to improve
its interoperability. Additional services could also be
developed and integrated to ease the digital twin ini-
tialization and the discovery of its connected objects.
Then, the model and the framework must be con-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
58

fronted with other users cases at a larger scale such
as smart factories and smart cities services. We also
aim at evaluating the benefits of our solution. First,
its benefits must be evaluated from a designer and de-
veloper point of view. We aim to demonstrate the
efficiency of our framework and tools for the devel-
opment of MIS compared to state of the art solu-
tions. Second, its benefits must also be evaluated from
an end-user point of view. Indeed, we could won-
der if MR would facilitate interaction between users
and their surroundings. A first step could be to com-
pare user’s appreciations and performances between
an MIS and a single smartphone application for con-
trolling the same connected environment.
REFERENCES
Alce, G., Roszko, M., Edlund, H., Olsson, S., Sved-
berg, J., and Wallerg
˚
ard, M. (2017). [POSTER]
AR as a User Interface for The Internet of Things
#x2014;Comparing Three Interaction Models. In
2017 IEEE International Symposium on Mixed and
Augmented Reality (ISMAR-Adjunct), pages 81–86.
Atzori, L., Iera, A., and Morabito, G. (2017). Understand-
ing the Internet of Things: definition, potentials, and
societal role of a fast evolving paradigm. Ad Hoc Net-
works, 56:122–140.
Blake, J. (2012). The natural user interface revolution. In
Natural User Interfaces in. Net, pages 1–43. Manning
publications edition.
Bouville, R., Gouranton, V., Boggini, T., Nouviale, F., and
Arnaldi, B. (2015). #FIVE : High-level components
for developing collaborative and interactive virtual en-
vironments. In 2015 IEEE 8th Workshop on Software
Engineering and Architectures for Realtime Interac-
tive Systems (SEARIS), pages 33–40, Arles, France.
IEEE.
Bouzekri, E., Canny, A., Martinie, C., and Palanque, P.
(2018). A Generic Software and Hardware Architec-
ture for Hybrid Interactive Systems. In EICS 2018
– Workshop on Heterogeneous Models and Modeling
Approaches for Engineering of Interactive Systems,
Paris, France.
Claude, G., Gouranton, V., and Arnaldi, B. (2015). Versatile
Scenario Guidance for Collaborative Virtual Environ-
ments. In Proceedings of 10th International Confer-
ence on Computer Graphics Theory and Applications
(GRAPP’15), berlin, Germany.
Coutrix, C. and Nigay, L. (2006). Mixed reality: a model
of mixed interaction. In Proceedings of the working
conference on Advanced visual interfaces - AVI ’06,
page 43, Venezia, Italy. ACM Press.
Dubois, E., Bortolaso, C., Appert, D., and Gauffre, G.
(2014). An MDE-based framework to support the de-
velopment of Mixed Interactive Systems. Science of
Computer Programming, 89:199–221.
Dubois, E., Gray, P., and Nigay, L. (2010). The engineering
of mixed reality systems. Human–Computer Interac-
tion Series. Springer Science & Business Media.
Glaessgen, E. and Stargel, D. (2012). The digital twin
paradigm for future NASA and US Air Force ve-
hicles. In 53rd AIAA/ASME/ASCE/AHS/ASC Struc-
tures, Structural Dynamics and Materials Conference
20th AIAA/ASME/AHS Adaptive Structures Confer-
ence 14th AIAA, page 1818.
Greer, C., Burns, M., Wollman, D., and Griffor, E. (2019).
Cyber-physical systems and internet of things. Tech-
nical Report NIST SP 1900-202, National Institute of
Standards and Technology, Gaithersburg, MD.
Grieves, M. W. (2019). Virtually Intelligent Product Sys-
tems: Digital and Physical Twins. Complex Systems
Engineering: Theory and Practice, pages 175–200.
Hussey, A. and Carrington, D. (1997). Comparing the MVC
and PAC architectures: a formal perspective. IEE Pro-
ceedings - Software Engineering, 144(4):224–236.
Jacob, R. J., Girouard, A., Hirshfield, L. M., Horn, M. S.,
Shaer, O., Solovey, E. T., and Zigelbaum, J. (2008).
Reality-based Interaction: A Framework for post-
WIMP Interfaces. In Proceedings of the SIGCHI
Conference on Human Factors in Computing Systems,
CHI ’08, pages 201–210, New York, NY, USA. ACM.
Kelaidonis, D., Somov, A., Foteinos, V., Poulios, G.,
Stavroulaki, V., Vlacheas, P., Demestichas, P., Bara-
nov, A., Biswas, A. R., and Giaffreda, R. (2012). Vir-
tualization and Cognitive Management of Real World
Objects in the Internet of Things. In 2012 IEEE
International Conference on Green Computing and
Communications, pages 187–194, Besancon, France.
IEEE.
Kim, K., B
¨
olling, L., Haesler, S., Bailenson, J., Bruder, G.,
and F. Welch, G. (2018). Does a Digital Assistant
Need a Body? The Influence of Visual Embodiment
and Social Behavior on the Perception of Intelligent
Virtual Agents in AR. pages 105–114, Munich.
Kritzler, M., Funk, M., Michahelles, F., and Rohde, W.
(2017). The Virtual Twin: Controlling Smart Factories
Using a Spatially-correct Augmented Reality Repre-
sentation. In Proceedings of the Seventh International
Conference on the Internet of Things, IoT ’17, pages
38:1–38:2, New York, NY, USA. ACM.
Lacoche, J., Le Chenechal, M., Villain, E., and Foulonneau,
A. (2019). Model and Tools for Integrating IoT into
Mixed Reality Environments: Towards a Virtual-Real
Seamless Continuum. In ICAT-EGVE 2019 - Inter-
national Conference on Artificial Reality and Telexis-
tence and Eurographics Symposium on Virtual Envi-
ronments, Tokyo, Japan.
Leonard, J. J. and Durrant-Whyte, H. F. (1991). Simultane-
ous map building and localization for an autonomous
mobile robot. In Proceedings IROS ’91:IEEE/RSJ In-
ternational Workshop on Intelligent Robots and Sys-
tems ’91, pages 1442–1447 vol.3.
Lin, S., Cheng, H. F., Li, W., Huang, Z., Hui, P., and Peylo,
C. (2017). Ubii: Physical World Interaction Through
Augmented Reality. IEEE Transactions on Mobile
Computing, 16(3):872–885.
A Unified Design Development Framework for Mixed Interactive Systems
59

Liu, W. (2010). Natural user interface- next mainstream
product user interface. In 2010 IEEE 11th Interna-
tional Conference on Computer-Aided Industrial De-
sign Conceptual Design 1, volume 1, pages 203–205.
MacWilliams, A., Sandor, C., Wagner, M., Bauer, M.,
Klinker, G., and Bruegge, B. (2003). Herding Sheep:
Live System Development for Distributed Augmented
Reality. In Proceedings of the 2Nd IEEE/ACM Inter-
national Symposium on Mixed and Augmented Real-
ity, ISMAR ’03, pages 123–, Washington, DC, USA.
IEEE Computer Society.
Mann, S., Furness, T., Yuan, Y., Iorio, J., and Wang, Z.
(2018). All Reality: Virtual, Augmented, Mixed
(X), Mediated (X,Y), and Multimediated Reality.
arXiv:1804.08386 [cs]. arXiv: 1804.08386.
Marchand, E., Uchiyama, H., and Spindler, F. (2016). Pose
Estimation for Augmented Reality: A Hands-On Sur-
vey. IEEE Transactions on Visualization and Com-
puter Graphics, 22(12):2633–2651.
Milgram, P. and Kishino, F. (1994). A Taxonomy of Mixed
Reality Visual Displays. IEICE Transactions on In-
formation Systems, E77-D.
Mistry, P. and Maes, P. (2009). SixthSense: A Wearable
Gestural Interface. In ACM SIGGRAPH ASIA 2009
Art Gallery & Emerging Technologies: Adapta-
tion, SIGGRAPH ASIA ’09, pages 85–85, New York,
NY, USA. ACM.
Nitti, M., Pilloni, V., Colistra, G., and Atzori, L. (2016).
The Virtual Object as a Major Element of the Internet
of Things: A Survey. IEEE Communications Surveys
& Tutorials, 18(2):1228–1240.
Norman, D. A. (2010). Natural User Interfaces Are Not
Natural. interactions, 17(3):6–10.
Normand, E. and McGuffin, M. J. (2018). Enlarging a
Smartphone with AR to Create a Handheld VESAD
(Virtually Extended Screen-Aligned Display). In 2018
IEEE International Symposium on Mixed and Aug-
mented Reality (ISMAR), pages 123–133, Munich,
Germany.
Norouzi, N., Bruder, G., Belna, B., Mutter, S., Turgut,
D., and Welch, G. (2019). A Systematic Review
of the Convergence of Augmented Reality, Intelli-
gent Virtual Agents, and the Internet of Things. In
Al-Turjman, F., editor, Artificial Intelligence in IoT,
pages 1–24. Springer International Publishing, Cham.
Petersen, N. and Stricker, D. (2009). Continuous Natural
User Interface: Reducing the Gap Between Real and
Digital World. In Proceedings of the 2009 8th IEEE
International Symposium on Mixed and Augmented
Reality, ISMAR ’09, pages 23–26, Washington, DC,
USA. IEEE Computer Society.
Pfeiffer, T. and Pfeiffer-Leßmann, N. (2018). Virtual Pro-
totyping of Mixed Reality Interfaces with Internet of
Things (IoT) Connectivity. i-com, 17(2):179–186.
Poslad, S. (2011). Ubiquitous computing: smart devices,
environments and interactions. John Wiley & Sons.
S
´
anchez L
´
opez, T., Ranasinghe, D. C., Harrison, M., and
Mcfarlane, D. (2012). Adding Sense to the Internet
of Things. Personal Ubiquitous Comput., 16(3):291–
308.
Sulisz, C. and Seeling, P. (2012). An Off-the-shelf Wearable
HUD System for Support in Indoor Environments. In
Proceedings of the 11th International Conference on
Mobile and Ubiquitous Multimedia, MUM ’12, pages
60:1–60:4, New York, NY, USA. ACM.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
60
