
Evaluation of Reinforcement Learning Methods for a Self-learning
System
David Bechtold, Alexander Wendt, and Axel Jantsch
TU Wien, Institute of Computer Technology, Gusshausstrasse 27-29, A-1040 Vienna, Austria
Keywords: Reinforcement Learning, Machine Learning, Self-learning, Neural Networks, Q-learning, Deep Q-learning,
Replay Memory, Artificial Intelligence, Rewards, Algorithms.
Abstract: In recent years, interest in self-learning methods has increased significantly. A challenge is to learn to survive
in a real or simulated world by solving tasks with as little prior knowledge about itself, the task, and the
environment. In this paper, the state of the art methods of reinforcement learning, in particular, Q-learning,
are analyzed regarding applicability to such a problem. The Q-learning algorithm is completed with replay
memories and exploration functions. Several small improvements are proposed. The methods are then
evaluated in two simulated environments: a discrete bit-flip and a continuous pendulum environment. The
result is a lookup table of the best suitable algorithms for each type of problem.
1 INTRODUCTION
The interest in machine learning research has
exploded in recent years. Nowadays, it helps us to
accomplish tasks that could not be implemented from
scratch because of the immense state space. These
methods learn from experiences just as humans do,
but compared to us, much more additional data is
necessary. Human beings immediately recognize
which impact their actions have on the environment.
Machines lack that understanding. Due to the large
state space, the function to be learned is usually
approximated.
In a project, a self-learning agent shall be
developed that learns from scratch what its sensors
and actuators are doing and how to use them to reach
a certain goal. The overall purpose is to develop one
software that can adapt to an application, where the
interfaces to the environment are unknown at design
time.
A good approach to handle large state spaces is to
let the system learn to solve the task completely
independent. For scalability, the task should not be
tied to any assumptions about the environment.
Therefore, the agent should start with little prior
knowledge about the task, the environment, and the
meaning of the in- or outputs. In order for a new task
to be learned, only a reward function has to be
designed, which rewards the agent for performed
actions. With that in mind, a robot-like application is
appealing. For this, the following constraints should
be considered:
Continuous state space, because sensory outputs
are continuous
Work only with a partial part of the environment
perceived
Deal with sparse rewards since real numbers are
uncountable
Have as little knowledge about itself, the task and
the environment as possible
The agent has to predict which action to perform
next to receive a high amount of reward. Deep Q-
learning (DQN) performed well on several Atari 2600
games. DQN outperformed a linear learning function
in 43 out of 49 games and human game tester in 29
out of 49 games (Minh, 2013). Therefore, algorithms
from the area of reinforcement learning algorithms
are selected.
To prepare for a self-learning agent, the main
research objective of this paper is to address the
question: which combination of reinforcement
learning algorithms is most suitable for discrete and
continuous state spaces and action spaces.
The focus of this paper is to analyze, improve and
compare different Q-learning algorithms, replay
memories, and exploration functions to determine
which combination of algorithms to choose for each
task setting. The algorithms are being evaluated in
two simulation environments: a discrete bit-flip
36
Bechtold, D., Wendt, A. and Jantsch, A.
Evaluation of Reinforcement Learning Methods for a Self-learning System.
DOI: 10.5220/0008909500360047
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 36-47
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

environment (Andrychowicz, 2017) and a continuous
pendulum environment
1
.
2 AVAILABLE ALGORITHMS
Reinforcement Learning does not use labels for
datasets in the same way as supervised learning does.
There is no ground truth present. Instead, the agent
receives a reward or punishment signal through
exploration of an environment. It is attempted to
maximize this reward signal in the long-term because
the amount of reward describes how good or bad the
agent performed. Learning is described as finding
actions that result in a higher reward. Therefore, the
reward signal is transferred to an expected reward for
each state (Sutton, 1998).
There are two groups of methods: model-free or
not model-free. Not model-free methods require prior
knowledge about the environment in the form of state
transition probabilities. As this agent shall start from
scratch, only model-free methods are of interest.
A policy is a function, which maps states to
actions. The agent perceives a state. The policy
determines which action it will perform. In most
cases, the policy aims to maximize the cumulative
reward. On-Policy methods are based on known
policies. Off-Policy methods are based on learned
content.
Immediate rewards are given directly after an
action and no future rewards need to be considered.
To maximize the reward, only the selected action and
the current state of the agent are essential. Delayed
rewards mean that an action can generate immediate
rewards, but the future must be considered, at least
the next state of the environment. These problems are
more challenging to solve because the agent has to
choose actions that pay off in the future. Pure-delayed
rewards are the same for all states except the last state
of an environment. Playing chess, for example, could
be such a problem because the environment only
gives the agent a reward for winning or losing the
game.
Finally, the reward function can be designed to be
shaped or non-shaped. Non-shaped reward functions
usually provide only a positive reward for the main
goal of the task. Shaped reward functions are
typically designed to guide the learner towards the
main goal by providing rewards for getting closer to
the goal.
1
Open AI Gym; Pendulum, 2019.
https://gym.openai.com/envs/Pendulum-v0/
Reinforcement learning techniques try to solve
finite Markov Decision Processes (MDP). MDPs
describe the agent’s interaction with the environment
and vice versa. At each time step, the agent is located
in a state and performs an action selected by a policy
that leads to a successor state and receives a reward.
The goal is to optimize the total discounted
rewards over time. It requires a scalar number that
estimates how good it is to be in a specific state, or
which action should be performed next to receive a
high amount of reward. It can be achieved with the
help of the so-called state-value function and the
action-value function. The state-value function
provides the expected cumulative discounted reward
(expected return) for a state of a policy. The action-
value function provides the expected return for a state
executing the action of a policy.
2.1 Q-learning
Q-learning calculates Q-values, i.e. the expected
reward, which shows how much reward to expect by
performing a particular action from a certain state.
Deep Q-learning means that a neural net is used as a
function approximation for predicting the Q-values.
As a model-free algorithm is required, at least two
policies are usually used: one for exploring the
environment, e.g. a random policy, which updates the
Markov Decision Process of the agent. With this
knowledge, the second policy is used after training to
exploit the environment. When the state visits reach
towards infinity, the trained policy converges to the
optimal policy. At this point, the agent can stop
performing random actions and start to act according
to the trained policy.
An agent using the Q-learning approach updates
the corresponding Q-value after each observed
transition. A transition is a 4-tuple
,
,
,
that consists of the current state
, the performed
action
, the resulting state
and the earned
reward
.
A method of updating the Q-values is the
Temporal Differences (TD) method (Dayan, 1992). A
problem with Temporal Difference Q-learning is that
Q-values must be stored in a lookup Q-table. For a
large continuous state space, it suffers from the Curse
of Dimensionality (Kober, 2012) and cannot be used
here. The team of Google DeepMind (Minh, 2015)
overcame this issue by using a neural network to
approximate the action-value function. Instead of
using a state and an action to update the Q-table with
Evaluation of Reinforcement Learning Methods for a Self-learning System
37
a Q-value, they only feed the Q-network with a state
and obtain a Q-value prediction for each action. The
highest Q-value represents the best action that can be
performed from a particular state. The Deep Q-
learning network (DQN) is trained with a loss
function that determines the error and allows the
weights to be changed. Further, a replay memory is
used to store the last n states, which are used as a
mini-batch for training.
A problem with DQN is that small changes in the
Q-values can lead to fast policy changes and thus, the
policy can begin to oscillate. It leads to an unstable of
the Q-values, which harms the task solving
performance. To prevent this particular case, the
Double DQN (DDQN) (van Hasselt, 2015) uses two
Q-networks: The first Q-network that is used for
action selection only and the second Q-network that
evaluates actions. It is attempted to keep the Q-
network as stable as possible over several transitions
by slowly updating its weights.
For robotic control, it is essential to consider
continuous action spaces. The predicted Q-values
only determine which action leads to the highest
amount of reward, but not with how much force this
action should be performed. (Lillicrap, 2015)
introduced the Deep Deterministic Policy Gradient
(DDPG), which introduces an actor-critic (AC)
algorithm to deal with continuous action spaces.
DDPG uses two Q-networks, of which one learns to
act (actor), while the other learns to criticize the taken
action (critic).
2.2 Replay Memories
All Deep Q-learning algorithms need to store
transitions in a replay memory. If this were not the
case, the Q-network would have to be trained by
successive transitions. It is like learning based only
on immediate experiences, without considering the
past. Experiences have to be considered to enable a
successful learning approach. It is done by saving
transitions in a so-called replay memory. However,
successive transitions are very inefficient due to the
strong correlation between them.
To break up these correlations, the transitions are
usually sampled randomly. Further, as the memory
gets full, the oldest transitions are deleted (Minh,
2013). The collaboration of the environment, Q-
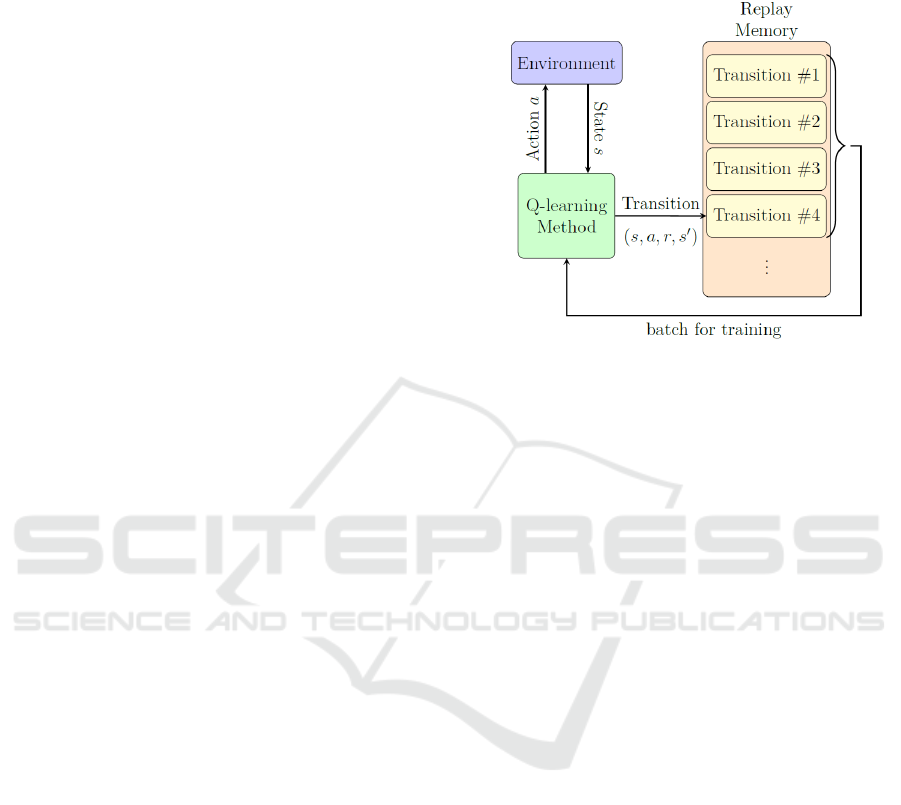
learning method, and replay memory can be observed
in Figure 1.
An issue with this type of memory is catastrophic
forgetting (Kirkpatrick, 2017). Either it means that
the Q-network has learned a task correctly but forgets
about it by simply being trained with many useless
transitions, or it was not trained with transitions that
solve the task at all, i.e. in a sparse rewarding
environment.
Figure 1: Collaboration of the replay memory with the Q-
learning method and environment.
Experience Replay (EXPR) (Minh, 2013) is the
simplest and most widely used one. Transitions are
stored one after another in a memory of size N. The
most recent transitions experienced are always stored
at the end of the memory. Mini-batches are sampled
randomly distributed from the whole memory. As the
memory grows full, the oldest transitions, which are
the transitions at the beginning of the memory, are
deleted. Intuitively, this memory is the most
susceptible to catastrophic forgetting.
Prioritized Experience Replay (PEXPR)
(Schaul, 2015) takes advantage of the fact that the
temporal difference (TD) error of transitions can
easily be calculated. The TD error shows how
surprising or unexpected a transition is, i.e. the higher
the TD error of a transition, the more the agent can
learn from these transitions. Sampling only
transitions with high TD error can make a system
prone to overfitting, due to the lack of diversity.
Therefore, the TD error is converted to a priority. To
guarantee that even transitions with low priorities are
sampled with a non-zero probability from the
memory, multiple methods are used. One method is
to set the priority of a transition to the maximum for
the first insert. It ensures that these transitions are
sampled for sure in the upcoming mini-batch. Two
types of prioritizations are available: rank-based
(PRANK) and proportional-based (PPROP).
Hindsight Experience Replay (HER) is suitable in
a sparse reward environment. Rewards are only given
if a goal is reached (pure-delayed rewards). Usually,
multiple entire episodes are stored in the memory
without any positive rewards (Andrychowicz, 2017).
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
38

From episodes without positive rewards, the Q-
learning approach only learns which actions should
not be performed. It is not useless knowledge, but in
the end, it does not help to solve the task. Therefore,
Q-learning learns little or even nothing from such
episodes. However, these episodes contain some
useful information, such as how non-goal states can
be reached. This knowledge is useful and can help the
agent to solve the task better and faster. If this state
must be visited in order to solve the task, the
knowledge about how to reach it can be considered as
relevant. To enable learning, the algorithm defines a
state as a virtual goal, rewards it with zero, and adds
it to the memory. As Hindsight Experience Replay
only instructs how virtual goals are generated and not
how to save them, it is compatible with all other
replay memory methods, like Experience Replay. To
decide which goal the Q-network should follow, the
state of the virtual or main goals is additionally
provided as an input. It makes it necessary to double
the size of the Q-network. Providing the main goals
as an input for the Q-network is, in the authors’
opinion, not suitable for self-learning. The Q-network
simply learns that it must reach the state, which is
equal to the goal input. Another issue is that HER
performs poorly in combination with shaped reward
functions (Andrychowicz, 2017).
2.3 Exploration
To learn policies in an optimal way, an agent must
make two far-reaching decisions: how long should the
environment be explored and when should it be
exploited? Exploration means that an agent performs
actions to gather more information about the task and
the environment. Exploitation means that an agent
only executes the best action possible from a certain
state. Finding out when to explore and when to
exploit is a key challenge, known as the exploration-
exploitation dilemma (Sutton, 1998).
Exploration methods can be divided into two
groups: directed and undirected (Thrun, 1992).
Directed exploration uses information about the task
and/or the environment. One requirement mentioned
in the introduction is that the agent should know as
little as possible about the task and the environment
at the start. Therefore, only undirected exploration is
considered here.
ε-greedy (EG) is a non-greedy exploratory
method in which the agent chooses a random action
with a probability of 0ε1at each time step
instead of performing the action with the highest Q-
2
https://gym.openai.com/envs/
value. To avoid the exploration-exploitation
dilemma, ε is decreased at each timestep by a fixed
scalar number. The main challenge is to find the right
exploration decline.
For a physical environment with momentum, an
Ornstein-Uhlenbeck process (OU) is usually used as
additive noise to enable exploration. This process
models the velocity of a Brownian particle with
friction (Lillicrap, 2015). Especially in the case of
robot control, such a process is used, due to the
drifting behavior of the output values. The parameters
can be set to produce only small drift-like values. In
general, the Ornstein-Uhlenbeck process is a
stochastic process with medium-reversing properties
as in equation 1.
∙
(1)
where
. means how fast the variable reverts
towards the mean. is the degree of the process
volatility and represents the equilibrium or mean
value and a is the start value of the process, which are
usually set to zero. The Ornstein-Uhlenbeck process
can be considered as a noise process. It generates
temporarily correlated noise. The noise ,,,
is added to the action to enable exploration.
3 RELATED WORK
Although reinforcement learning is a hot topic,
finding articles, which use real physical robots that
learn to solve problems on their own is rare. Dozens
of articles and simulation environments exist. For
example, the OpenAI Gym
2
offers more than sixty
environments in which learning algorithms can be
evaluated and compared to the results of other
competitors. However, not many articles deal with
few sensors and a reduced perception of the
environmental state.
Since robotic tasks are often associated with
complex robot motion models, poor environmental
state resolution and sparse rewards play an important
role. (Vecerik, 2017) introduces a new methodology
called Deep Deterministic Policy Gradient from
Demonstrations (DDPGfD) that should help to solve
those issues. The idea is to store a defined number of
task solving demonstrations in the replay memory and
keep them forever.
In to a 2D aerial combat simulation environment
with near continuous state spaces (Leuenberger,
2018), the Continuous Actor-Critic Learning
Automaton (CACLA) is applied. They replaced
Evaluation of Reinforcement Learning Methods for a Self-learning System
39

Gaussian noise by an Ornstein-Uhlenbeck process as
an exploration function and introduced a modified
version the Monte Carlo CACLA, which helped to
improve performance.
In (Shi, 2018), an adaptive strategy selection
method with reinforcement learning for robotic
soccer games was introduced. The researchers used
Q-learning to learn which strategy small robots
should follow in certain situations to successfully
play football. Each team consisted of four robots and
the game state was observed with a camera filming
the entire football field. The main issue addressed by
this work was that a very dynamic environment, such
as soccer with multiple teammates, requires timely
and precise decision-making.
In (Hwangbo, 2017), a reinforced learning
method was introduced for the control of a quadrotor.
The 18-dimensional state vector of the quadrotor
included a rotation matrix, the position, the linear
velocity, and the angular velocity. The policy was
optimized with three methods: Trust Region Policy
Optimization (TRPO) (Schulman, 2015), DDPG
(Lillicrap, 2015), and a new optimization algorithm
developed by the authors. While TRPO and DDPG
performed poorly, the algorithm of the authors
performed well. However, the authors used a model-
based learning approach, which is not applicable here.
(Tallec, 2019) analyzes how various parameters in
DDPG can be tuned to improve the performance in
near continuous time spaces. These are discretized
environments with small time steps. Through a
continuous-time analysis, where the time step is
considered, such as discount factor, reward, learning
rate and exploration parameters.
4 IMPROVEMENTS
For the particular problem of learning from scratch,
three improvements of the analyzed algorithms are
proposed. The aim is to achieve better results overall.
4.1 Hindsight Experience Replay with
Goal Discovery
The idea behind Hindsight Experience Replay with
Goal Discovery (HERGD) is that the main goal of the
agent has to be discovered first and only after its
discovery, it is provided to the Q-network. This
approach offers more flexibility than the standard
Hindsight Experience Replay, in which the main goal
has to be provided to the Q-network from the
beginning. Virtual goals are inserted as defined in the
standard Hindsight Experience Replay algorithm.
In environments where it is unlikely that the target
will be reached with random exploration methods,
HERGD will struggle in the same way as the ε-greedy
and Ornstein-Uhlenbeck process. Although, once the
goal is found, this approach can get to the optimal
policy faster.
4.2 ε-greedy Continuous
Since ε-greedy is only applicable to integer actions,
ε-greedy Continuous (EGC) extends the idea of
standard ε-greedy to support continuous action spaces
as well. The key idea behind this approach is that
every action from the action space has its own action
range [
,
]. For each action a, a random
uniform value is drawn, for which
is valid. The policy equation (2) tells when to
use a random action or a policy action.
∈
,
Ϛ
,
(2)
is the policy,
is the action space and ε is
the threshold of exploration that is lowered with each
time step.
4.3 Ornstein-Uhlenbeck Annealed
An issue concerning the standard Ornstein-
Uhlenbeck process is that switching from exploring
to exploiting is done immediately. This means the
process is outputting noise until the exploration stops
and the exploitation begins. It can harm the learning
process because actions, that are already optimally
learned, can be overwritten by the outputted noise. On
the other hand, limiting the outputted noise by
adjusting θ or σ leads to under-exploration.
Therefore, the idea behind Ornstein-Uhlenbeck
Annealed (OUA) is to reduce the generated noise
after every time step by a function similar to ε-greedy
continuous as shown in equation 3
∶
,,,∙
(3)
For this evaluation, the function
is selected to
reduce the noise linearly after every timestep.
5 EVALUATION
The algorithms are being tested for suitability and
being compared in different environments.
5.1 Experiment Environments
A discrete and continuous state environment is
provided to evaluate the algorithms. For both
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
40

environments shaped and non-shaped rewards are
analyzed.
5.1.1 Discrete Bit-flip Environment
The basic idea of this environment is based on the bit-
flip environment (Andrychowicz, 2017). The goal is
to flip the bits in a bit vector
of length n in the
same way that it matches a target bit vector
within n tries. The state
…
is the
bit vector
. The action a is the number of the
bit to flip and it can be chosen from the action space
0,1,…,1
. For instance, an action a = 2
means that the bit
in bit vector
is flipped.
To make the algorithms and methods comparable, bit
vector
is always reset to zero and the target bit
vector
is taken from a look-up table.
Minor adjustments had to be made to use this
environment for this application. Since DDPG
outputs continuous values and the bit to be flipped
must be an integer number, a conversion from real to
natural numbers has to be made. Therefore, the output
of DDPG is divided into n equal sections, each
representing one bit in the bit vector.
Because this is a discrete process, the Q-learning
method DDPG does not use an OU process for
exploration. Thus, only continuous ε-greedy
exploration is used.
In the non-shaped reward function, the reward for
reaching the goal is set to 1, and all other rewards are
set to -1. It simulates a delayed and sparse rewards
problem, since the probability of finding the target bit
vector
is drastically decreasing with the bit
vector length n.
The shaped reward function simply counts the
equal bits of a bit vector
and target bit vector
. Then, the counted number is divided by n-1.
5.1.2 Continuous Pendulum Environment
To be able to evaluate the RL methods within a
continuous action and state-space environment the
pendulum environment from open AI Gym was
chosen. The goal is to swing a frictionless pendulum
upright, so that it stays vertical, pointing upwards.
Figure 2 shows the pendulum near the maximum
reward position. The perceived state of this
environment is a three tuple ∈
,sin,. This state is generated by the
pendulum angle and vertical velocity of the
pendulum. To its state, a torque 22 can be
provided as an action a. However, to make this
environment more difficult to solve, the torque is
limited to 11 here. Therefore, the pendulum
must gain velocity through swinging to reach a
rewarding position. After a reset, the pendulum starts
in a random position and with a random torque.
Figure 2: The pendulum environment with the pendulum
position near the maximum reward position.
Non-shaped rewards are set to 1 if the pendulum
points upwards and its angle is in range of 1°
1°. If not, the reward is set to -1.
For shaped rewards, this environment uses
equation 4 with
and 8 8.
Therefore, the reward is in the range of 16.27
0.
0.1∗
2
0.001∗
(4)
Since Q-learning algorithms output discrete
actions, conversion from natural numbers to real
numbers is done. The output layer of DQN and
DDQN are extended to 21 nodes. Each of them
represents a specific torque value, starting from -1.0,
with a step size of 0.1, to 1.0 including zero.
5.2 Test Setup
A Q-learning method requires the following methods
to work: A Q-algorithm, an exploration method, a
replay memory, and a reward function. The Q-
learning algorithm can be considered as the brain.
Learning and decision making is done here. DQN and
DDQN use standard feed-forward multilayer neural
networks. Important parameters are the number of
layers and neurons, the activation functions, the
optimizer, the learning rate, the discount factor, and
the soft target update factor. The soft target factor is
only required for DDQN and DDPG because DQN Q-
networks do not include a second neural net.
According to (Lillicrap, 2015), all Q-networks in this
work use the Adam optimizer (Kingma, 2014).
The learning rate is multiplied by the values
computed by the optimizer. Therefore, it determines
how fast the Q-network learns. Since some of our
evaluations have to deal with sparse rewards, which
means that the past experiences are important, the
discount factor is chosen to be 0.98, which is close to
1.0. The learning rate and soft target update factor are
Evaluation of Reinforcement Learning Methods for a Self-learning System
41
chosen to be small, i.e. 0.001, because solving sparse
reward problems requires many transitions, since the
rewarding state is not often experienced. All hidden
layers use RELU units as activation function, as they
are currently the most successful and widely used
(Ramachandran, 2017).
For the replay memory, the most essential
parameter is its size. It determines how many
transitions can be stored. While large memory sizes
can only slow down learning, too small memory sizes
can drastically reduce learning success or even make
it impossible. Sizes from 16 to 128 state transitions
will be tested.
For the Hindsight Experience Replay,
additionally, the sampling method and the quantity of
new goals to sample has to be chosen. Based on
(Andrychowicz, 2017), the sampling method future is
selected because it gives the best overall results
together with the best value for parameter k = 4. For
PPROP, (Schaul, 2015) mentioned that a good value
for the prioritization factor is 0.6.
When exploring, it is sometimes necessary to
carry out already learned actions to be able to refine
them further and finally to solve the task in the best
way possible. For the exploration function, the most
critical parameter here is the exploration rate, which
determines after how many actions performed the
exploration ends and the exploitation begins. It is
common practice to place this value at the end of the
entire learning procedure, i.e. ∗
.
The evaluations are carried out with Keras
3
framework, which is programmed with Python. It is
used to model neural networks and runs on top of the
symbolic math library TensorFlow
4
.
5.3 Results
The measurements are performed in two separate
environments: a discrete bit-flip and a continuous
pendulum environment
5.3.1 Discrete Bit-flip Environment
The evaluation starts with a bit vector length of n = 1.
At the end of each episode, which is exactly after 200
bit flips, it is checked if the current method solves the
bit vector with length n within n bit flips. If so, the
current attempt t is considered as successful. An
attempt t is assumed to be failed if a method fails to
solve a certain bit vector within 50 episodes. After
determining whether the bit vector length n has been
3
https://keras.io
solved successfully or the attempt has failed, the
method is reset and the next attempt t = t+1 is started.
After five tries, it is checked if the current method
has at least one successful attempt. If this is the case,
the next bit vector of length n := n + 1 can be
performed. The success rate of a reinforcement
learning method can be calculated by dividing the
total successful attempts by the number of attempts.
Figure 3 shows representative results of the non-
shaped reward function. With raising bit vector
lengths, the target bit vector
is more
challenging to discover. Only HER has the advantage
that the Q-network knows the goal state of the
environment right from the beginning. HERGD first
has the same discovery issue as PPROP and EXPR
until the goal is experienced once. In general, larger
batch sizes in combination with HER, HERGD or
PPROP helps when dealing with sparse rewards.
Between the batch size 16 and 128, only a difference
of 3 bits was measured, i.e. 21% better results.
Figure 3: Bit-flip environment with non-shaped rewards for
different batch sizes and combinations of Q-Learning,
replay memories and exploration methods.
In the comparison of DQN with DDQN, it can be
observed that DDQN solves a bit vector length n more
consistently, even with smaller batch size like 16.
One reason that DDQN behaved in this evaluation
pretty much like DQN is the low number of episodes
and bit flips to solve for a bit vector length n. Since
the target network used by DDQN is updated slowly
to avoid divergence, this method requires more
training steps than DQN. For DDGP, the environment
was even more challenging to solve because a
4
https://www.tensorflow.org
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
42
continuous action space has to be searched, while
DQN and DDQN only have to search a discrete action
space.
The average training time increases with larger
batch sizes. Also, methods using PPROP or DDPG
require a lot more training time as depicted in
Figure 4. One reason is that the DDPG Q-network
architecture is more complex than the others because
it consists of four neural networks. PPROP internally
uses a sum-tree to store transitions, which increases
training durations.
Figure 4: Training time in the bit-flip environment of
PPROP with non-shaped rewards
The evaluation results of the bit-flip environment
with a shaped reward function can be observed in a
subset of representative results in Figure 5. It can be
noticed that DQN and DDQN were able to solve a
much larger number of bit vector lengths. Reward
shaping drastically improved performance. Only
DDPG performed worse with non-shaped rewards,
which was expected as DDPG is designed for
continuous spaces.
Comparing DQN with DDQN as in Figure 5,
shows that DDQN solves the same bit vector length
more consistently, even with smaller batch sizes, as it
was the case with the non-shaped reward function.
HER and HERGD performed similar but worse than
the EXPR or PPROP. This is not surprising since the
HER (Andrychowicz, 2017) performs badly with
shaped rewards. PPROP performed a little bit better
than EXPR. Average training times do not differ
much from the non-shaped ones.
Figure 5: Success rates in the bit-flip environment of
PPROP with shaped rewards.
5.3.2 Ornstein-Uhlenbeck Process
Parameter Evaluation
In this section, different parameter settings for an OU
and the introduced OUA process are evaluated to
determine which values are useful in certain
environments. All Q-networks use an output range of
1 1. An OU process consists of four
parameters to adjust: θ, σ, μ and a. μ, the mean value
and the starting value are set to 0.0. θ indicates how
fast the process reverts towards the mean. σ
determines the maximum volatility. The evaluation
only records the noise generated by the OU or OUA
process.
Figure 6: The Ornstein-Uhlenbeck process.
Figure 6 shows the evaluation of the standard OU
process with different settings for θ and σ. In the top
graph (θ = 0.15, σ = 0.3), it can be observed that
setting θ < σ will cause the process to output many
values near to the range boundaries. It can be useful
for agents where abrupt control of the actuators is
required. For instance, if a robotic arm is used to
control a heavy mass object, abrupt controlling can be
useful. If θ > σ like in the middle graph, it results in
many output values being close to zero. For agents,
where fine steering is necessary, this setting is useful.
If θ = σ like in the bottom graph, the output values are
Evaluation of Reinforcement Learning Methods for a Self-learning System
43
concentrated close to zero and at the boundaries of the
range. This setting might be useful for environments
where the entire output range must be covered.
Figure 7: The Ornstein-Uhlenbeck Annealed process.
Results of the introduced OUA process is shown
in Figure 7. Linear decreasing can be observed.
Unfortunately, since an OU process uses the previous
outputted value, the output value increases over some
time again. This behavior is contra-productive, since
it was planned to decrease the outputted noise slowly
to enable soft-switching from exploring to exploiting.
Therefore, the OUA process did not improve the
standard OU method.
5.3.3 Continuous Pendulum Environment
Each tested method has exactly 250 episodes to solve
the pendulum environment. Each episode consists of
300 steps. At each step, an action is predicted by the
Q-network and applied as torque to the pendulum.
After every 10
th
episode, the learning success is
tested. For this purpose, the learned policy is used
over 20 episodes, and the received rewards are
summed up. Then the mean value is calculated from
the sum of rewards. Also, the standard deviation is
computed and presented as a transparent background
in the graph.
Figure 8: pendulum environment with non-shaped rewards.
The evaluation results of the non-shaped reward
function can be observed in Figure 8. In general, it
can be concluded that the task solving performance is
quite bad. Only, DDQN and DDPG in combination
with EXPR or PPROP as replay memories and EG or
EGC as exploration method managed to perform
acceptably. HERGD was not able to solve the
environment at all. HER delivers quite the same result
as HERGD. In continuous state space environments,
the main goal can only be defined within a small
range. In addition, since the state of the pendulum
environment consists of the vertical velocity, goal
discovery is very bad since the goal is discovered with
a non-zero velocity. This is a limit because the goal is
to keep the pendulum upright in a vertical position.
Figure 9: pendulum environment with shaped rewards.
The evaluation results for the shaped reward
function can be observed in Figure 9. Since HER and
HERGD in combination with shaped reward
functions are documented to perform poorly with
shaped rewards, these evaluations are discarded.
DDPG performed well, while DQN and DDQN did
very poorly in comparison.
Surprisingly, EXPR delivered a little bit better
results than PPROP. Concerning the fact that the
dimension of a discrete state space is countable, this
is not the case for a continuous state space. PPROP
prioritizes the transitions that are new or surprising.
For continuous state spaces, this almost applies to
every transition. Especially this affects the learning
performance for small batch sizes.
For the exploration methods, EGC performed
better than OU, because the behavior of OU is drift-
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
44

like. In the pendulum environment, it is better to
switch the torque repeatedly from positive to negative
values. This behavior increases the speed and allows
the pendulum to move to a vertical position. Finally,
it results show that PPROP increases the training
times drastically.
5.3.4 Discussion
Based on the evaluations done with the bit-flip
environment and pendulum environment, the best
combinations of the reinforced learning methods are
summarized in Table 1.
For discrete action spaces, it is recommended to
use the Double Deep Q-learning network (DDQN), as
it works better in such environments than the Deep Q-
learning network (DQN) and Deep Deterministic
Policy Gradient (DDPG). On the other side, DDPG
works best for continuous action spaces.
If continuous state spaces are considered, it is
recommended to use Experience Replay (EXPR) as
replay memory, because it performs quite the same as
Proportional Based Prioritized Experience Replay
(PPROP) and HERGD, but requires less training
time. On the other hand, for discrete state space
environments, where a non-shaped reward function is
used, it is recommended to use Hindsight Experience
Replay With Goal Discovery (HERGD) in
combination with PPROP. This will help to
successfully solve sparse reward environments.
Regarding the batch size, it is recommended to
choose a larger value depending on how sparse the
rewards are. The selection of the exploration method
has to be tuned based on the environment. In all cases,
a shaped reward function should be used, since it
drastically improves learning performance.
In a real world, robotic environment where the
agent is a robotic arm, standard OU process is
recommended. In environments, such as the
pendulum environment, where drift-like behavior of
the output values is not good, the introduced EGC
performed the best. With the aid of these evaluations,
it is possible to determine which methods should be
used for a robot in continuous action and state space.
5.3.5 Future Improvements
Some issues can be addressed that emerged during
this work. One problem with sparse reward tasks is
that a transition with a positive reward has to be
sampled from replay memory and has to be
propagated back by repeatedly sampling the
predecessor states. The Q-network slowly learns
which actions to perform from certain states in order
to reach the rewarding state. If the rewarding state is
perceived only a few times, this process is disturbed.
Considering catastrophic forgetting, successful
learning of the task becomes unlikely. To accelerate
the back propagating of Q-values, the Q-function
could be applied to the transitions before saving an
episode to the replay memory.
In that case, a positive reward is present
throughout an entire episode. Sampling a transition
with positive reward would become more likely. A
disadvantage is that the algorithm would convert
more slowly to the ideal policy. This approach can be
combined with the n-step loss mentioned in
(Vecerik, 2017), which should help to propagate the
Q-values along the trajectories.
A great influence on the learning time and the
learning success would be the improvement of the
exploration methods. Only random exploration
methods are possible because the agent should know
as little as possible about the environment. If there is
a memory limitation like in embedded systems,
count-based exploration methods are not applicable.
Count-based methods that store a counter, how many
times a state has been visited, and what actions are
taken to exit the state (Tang, 2016). Instead of
applying noise only to the output neurons, it could be
applied to the entire Q-network (Plappert, 2017).
Table 1: Summary of the best reinforced learning method combinations based on reward function.
Reward function
Non shaped shaped
cont. action space
cont. state space
DDPG, EXPR DDPG, EXPR
dis. action space
cont. state space
DDQN, EXPR DDQN, EXPR
cont. action space
dis. state space
DDPG, HERGD(PPROP) DDPG, EXPR
dis. action space
dis. state space
DDQN, HERGD(PPROP) DDQN, PPROP
Evaluation of Reinforcement Learning Methods for a Self-learning System
45

Another approach is to let the decision maker
adaptively learn the exploration policy in DDPG (Xu,
2018). The advantage is that this approach is scalable
and yields to a better global exploration. The
disadvantage is that this approach consumes more
memory than OU or EGC.
Finally, deep reinforcement learning in
continuous state and time spaces is still not robust to
small environmental changes and hyper parameter
optimization. For DDPG, the effect of every
individual action vanishes if the discretization
timestep becomes infinitesimal (Tallec, 2019). For
the pendulum environment, algorithm parameters
could be tuned to generate better performance
through a continuous-time analysis.
6 CONCLUSION
The main objective of this paper was to analyze which
combinations of reinforcement learning algorithms,
exploration methods and replay memories are most
suitable for discrete and continuous state spaces as
well as action spaces. Tests were performed in a
simulated discrete bit-flip and continuous pendulum
environment.
This research introduced new techniques to the
state-of-the-art methods, such as Hindsight
Experience Replay with Goal Discovery (HERGD),
ε-greedy Continuous (EGC), and Ornstein-
Uhlenbeck Annealed (OUA). While Ornstein-
Uhlenbeck Annealed did not improve performance,
Hindsight Experience Replay with Goal Discovery, ε-
greedy Continuous proved to perform well.
Equipped with a suitable combination of
algorithms, the next step is to transfer it into a self-
learning robot, which is based on embedded
hardware. The robot is supposed to start without
knowing anything about its sensors, actuators and
environment and gradually learn to survive. In
embedded hardware resource constraints will be an
important challenge to handle.
Enabling robots to learn complex tasks through
experience allows us to take a big step into the future.
The applications for such self-learning robots are
limitless. Writing complex algorithms to control
these robots is eliminated because they learn to
control themselves. In addition, through repetition,
they are able to optimize their behavior. Changes in
the environment do not affect them because they can
adapt to them automatically.
ACKNOWLEDGEMENTS
We gratefully acknowledge the financial support
provided to us by the BMVIT and FFG (Austrian
Research Promotion Agency) program Production of
the Future in the SAVE project (864883).
REFERENCES
Andrychowicz, M., Wolski, F., Ray, A., Schneider, J.,
Fong, R., Welinder, P., McGrew, B., Tobin, J., Abbeel,
P., Zaremba, W.: Hindsight Experience Replay. In:
CoRR abs/1707.01495 (2017)
Dayan, P.: The Convergence of TD(lambda) for General
lambda. In: Machine Learning 8 (1992), May, Nr. 3, S.
341–362. – ISSN 1573–0565
van Hasselt, H., Guez, A., S., David: Deep Reinforcement
Learning with Double Q-learning. In: CoRR
abs/1509.06461 (2015)
Hwangbo, J., Sa, I., Siegwart, R., Hutter, M.: Control of a
Quadrotor With Reinforcement Learning. In: IEEE
Robotics and Automation Letters 2 (2017), Oct, Nr. 4,
S. 2096–2103. – ISSN 2377–3766
Kingma, D. P., Ba, J.: Adam: A Method for Stochastic
Optimization. In: CoRR abs/1412.6980 (2014)
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A. A., Milan, K., Quan, J.,
Ramalho, T., Grabska-Barwinska, A., Hassabis, D.,
Clopath, C., Kumaran, D., Hadsell, R.: Overcoming
catastrophic forgetting in neural networks. In:
Proceedings of the National Academy of Sciences 114
(2017), Nr. 13, S. 3521–3526. – ISSN 0027–8424
Kober, J., Peters, J.: Reinforcement Learning in Robotics:
A Survey. Bd. 12. Berlin, Germany: Springer, 2012, S.
579–610
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., Wierstra, D.: Continuous control
with deep reinforcement learning. In: CoRR
abs/1509.02971 (2015)
Leuenberger G. and Wiering M. (2018). Actor-Critic
Reinforcement Learning with Neural Networks in
Continuous Games.In Proceedings of the 10th
International Conference on Agents and Artificial
Intelligence - Volume 2: ICAART, ISBN 978-989-758-
275-2, pages 53-60. DOI: 10.5220/0006556500530060
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., Riedmiller, M A.: Playing
Atari with Deep Reinforcement Learning. In: CoRR
abs/1312.5602 (2013)
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., Petersen, S., Beattie, C.,
Sadik, A., Antonoglou, I., King, H., Kumaran, D.,
Wierstra, D., Legg, S., Hassabis, D.: Human-level
control through deep reinforcement learning. In: Nature
518 (2015), Februar, Nr. 7540, S. 529–533. – ISSN
00280836
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
46

Plappert, M., Houthooft, R., Dhariwal, P., Sidor, S., Chen,
R. Y., Chen, X., Asfour, T., Abbeel, P., Andrychowicz,
M.: Parameter Space Noise for Exploration. In: CoRR
abs/1706.01905 (2017)
Ramachandran, P., Zoph, B., Le, Q. V.: Searching for
Activation Functions. In: CoRR abs/1710.05941 (2017)
Schaul, T., Quan, J., Antonoglou, I., Silver, D.: Prioritized
Experience Replay. In: CoRR abs/1511.05952 (2015)
Shi, H. ; Lin, Z. ; Hwang, K. ; Yang, S. ; Chen, J.: An
Adaptive Strategy Selection Method With
Reinforcement Learning for Robotic Soccer Games. In:
IEEE Access 6 (2018), S. 8376–8386. – ISSN 2169–
3536
Schulman, J., Levine, S., Moritz, P., Jordan, M., Abbeel, P.:
Trust Region Policy Optimization. In: CoRR
abs/1502.05477 (2015)
Sutton, R. S.; Barto, Andrew G.: Reinforcement Learning:
An Introduction. MIT Press, 1998
Tallec, C., Blier, L., Ollivier, Y.: Making Deep Q-learning
methods robust to time discretization. arXiv preprint
arXiv:1901.09732 (2019).
Tang, H., Houthooft, R., Foote, D., Stooke, A., Chen, X.,
Duan, Y., Schulman, J., Turck, F. D., Abbeel, P.:
Exploration: A Study of Count-Based Exploration for
Deep Reinforcement Learning. In: CoRR
abs/1611.04717 (2016)
Thrun, S. B.: Efficient Exploration in Reinforcement
Learning. Pittsburgh, PA, USA : Carnegie Mellon
University, 1992. – Forschungsbericht
Vecerik, M., Hester, T., Scholz, J., Wang, F., Pietquin, O.,
Piot, B., Heess, N., Rothörl, T., Lampe, T., Riedmiller,
M. A.: Leveraging Demonstrations for Deep
Reinforcement Learning on Robotics Problems with
Sparse Rewards. In: CoRR abs/1707.08817 (2017)
Xu, T., Liu, Q., Zhao, L., Peng, J.: Learning to Explore with
Meta-Policy Gradient. In: CoRR abs/1803.05044
(2018)
Evaluation of Reinforcement Learning Methods for a Self-learning System
47
