
Hand Gesture Recognition based on Near-infrared Sensing Wristband
Andualem T. Maereg
1 a
, Yang Lou
2 b
, Emanuele L. Secco
1 c
and Raymond King
2
1
Robotics Lab, Liverpool Hope University, Liverpool, U.K.
2
Facebook Reality Labs, Redmond, WA, U.S.A.
Keywords:
Hand Gesture, NIR, Human-machine Interaction (HCI), Bio-sensing, Virtual-reality, Wearable Sensing.
Abstract:
Wrist-worn gesture sensing systems can be used as a seamless interface for AR/VR interactions and control
of various devices. In this paper, we present a low-cost gesture sensing system that utilizes near Infrared
Emitters (600 - 1100 nm) and Photo-Receivers encompassing the wrist to infer hand gestures. The proposed
system consists of a wristband comprising Infrared emitters and receivers, data acquisition hardware, data
post-processing software, and gesture classification algorithms. During the data acquisition process, 24 near
Infrared Emitters are sequentially switched on around the wrist, and twelve Photo-diodes measure the light
reflected, refracted, and scattered by the tissues inside the wrist. The acquired data corresponding to different
gestures are labeled and input into a machine learning algorithm for gesture classification. To demonstrated
the accuracy and speed of the proposed system, real-time gesture sensing user studies were conducted. As a
result of this comparison, we obtained an average accuracy of 98.06% with standard deviation of 1.82%. In
addition, we evaluated that the system can perform six-eight gestures per second in real time using a desktop
computer operating with Core i7-7800X CPU at 3.5GHz and 32 GB RAM.
1 INTRODUCTION
Hand gesture recognition refers to the problem of
identifying hand gestures executed by a user at a spe-
cific time. Humans naturally gesticulate with their
hands forming both static hand poses and dynamic
gestures to deliver information. For this reason, hand
gesture sensing or recognition have long been stud-
ied for intuitive control of interactive systems, as
well as in many other engineering and medical ap-
plications (Fukui et al., 2014)(Rekimoto, 2001)(Ker-
ber et al., 2016). Some typical such applications in-
clude human-machine interaction interfaces, control
of hand prostheses and rehabilitation devices, sign
language interpretations (Peck, 2003)(Colac¸o et al.,
2013)(Freeman and Weissman, 1997).
In order to design all-day-wearable gesture sens-
ing devices, the following requirements are usually
considered: the devices should be non-obtrusive,
they should not cause physical discomfort or encum-
brances to the natural hand movement; moreover, they
should also be intuitive and easily accessible. To meet
all such criteria, a wrist-worn device is a great candi-
a
https://orcid.org/0000-0001-6389-0694
b
https://orcid.org/0000-0002-9216-5296
c
https://orcid.org/0000-0002-3269-6749
date. Therefore, there has been several bio-sensing
research that seeks to infer gestures from tracking the
anatomical changes within the wrist.
Several wrist-worn devices have been proposed
for hand gesture recognition. The sensing modalities
include camera-based systems (Kim et al., 2012), in-
ertial motion sensing (Wen et al., 2016)(Laput et al.,
2016), Electromyography(EMG) (Benalc
´
azar et al.,
2017)(McIntosh et al., 2016)(Boyali and Hashimoto,
2016)(Huang et al., 2015), Electrical Impedance To-
mography (EIT) (Zhang et al., 2016)(Zhang and
Harrison, 2015), and capacitive and resistive pres-
sure sensing systems (Dementyev and Paradiso,
2014)(McIntosh et al., 2016)(Truong et al., 2017).
Each modality has its own merits and limits. Wear-
able camera systems attach small cameras near the
wrist to recognize different hand shapes. For ex-
ample, Digits (Kim et al., 2012) uses a 3D infrared
camera to identify gestures using machine vision sys-
tems. However, some significant limitations of this
type of sensing include line-of-sight occlusions, am-
bient light noise, and higher computational cost as-
sociated with more complicated imaging processing
algorithms. Inertial motion sensing systems em-
ploy inertial measurement units (IMUs), which con-
sist of accelerometers, gyroscopes, and magnetome-
110
Maereg, A., Lou, Y., Secco, E. and King, R.
Hand Gesture Recognition based on Near-infrared Sensing Wristband.
DOI: 10.5220/0008909401100117
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 2: HUCAPP, pages
110-117
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ters, to measure arm and finger orientations (Wen
et al., 2016). Accelerometers data has also been
used to recognize different activities by sensing dy-
namic features related to hand motions (Laput et al.,
2016). However, Inertial motion sensors are very lim-
ited at detecting static hand gestures. Electromyo-
graphy (EMG) estimates the myoelectric potential
generated during hand and finger movements by at-
taching electrodes to the upper part of the forearm. It
has been extensively explored for static and dynamic
gesture detection (Benalc
´
azar et al., 2017)(Boyali and
Hashimoto, 2016). Compared to other sensing tech-
niques, the limitations of EMG systems include the
requirement of massive datasets and the heavy com-
putation burden associated with extensive signal pro-
cessing. In addition, they also require careful ini-
tial configuration and calibration for adequate perfor-
mance. Electrical impedance tomography (EIT) is
another well-studied method for hand gesture recog-
nition (Zhang and Harrison, 2015). It measures the
impedance changes between pairs of electrodes to
track the wrist tissue changes. However, this type
of method is susceptible to resistance coupling be-
tween the electrode and skin, and sometimes require
electric-conductive gel for stable coupling. Other
sensing modalities include Force sensing resistors
(FSRs) system, which measures the pressure distri-
bution around the wrist to identify different static ges-
tures (Dementyev and Paradiso, 2014), and Capac-
itive pressure sensors, such as GestureWrist (Reki-
moto, 2001)(Truong et al., 2017), which measures ca-
pacitive changes around the wrist are also used. Most
of the gesture sensing methods mentioned above are
unsuitable for practical use due to either low accuracy,
high cost, poor ergonomics, portability, or ease of use.
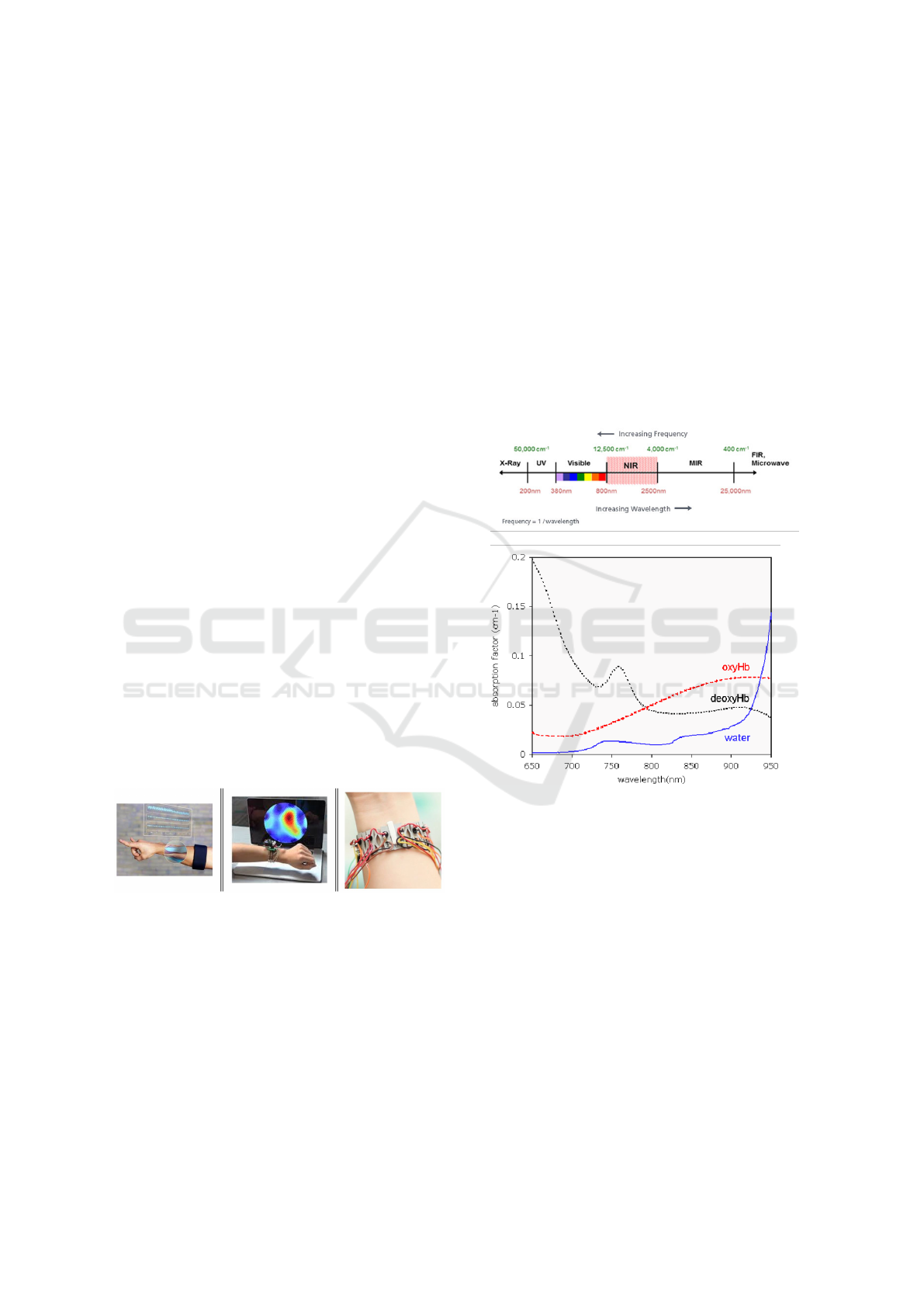
Figure 1: Gesture sensing technologies: Electromyography
(EMG), Electrical Impedance Tomography (EIT)(Zhang
and Harrison, 2015), Near Infrared Sensing(NIR) (McIn-
tosh et al., 2017), From Left to Right.
2 NEAR INFRARED (NIR)
SYSTEM
Near-infrared (NIR) systems have been long inves-
tigated in the area of medical applications, because
of their ability to image changes in tissues (Nielsen
et al., 2008)(Chaiken et al., 2011). The near-infrared
window is the light spectrum in the wavelength range
between 600nm to 1100nm. As shown in Figure 2,
Light has maximum penetration in tissues in Near In-
frared window. The absorption coefficient of water,
melanin, de-oxygenated, and oxygenated blood are
low in NIR window. Photons that enter human tis-
sue typically undergo absorption, scattering, and re-
flection. Changes in the anatomical structures of the
wrist while performing different gestures will result
in changes in how injected light interacts with tis-
sues, including the three types of incidents mentioned
above. These changes can be utilized to detect hand
gestures by measuring the transmission and diffrac-
tion of light through the wrist.
Figure 2: Absorption rate of Near Infrared light by differ-
ent tissues: Water, Oxygenated and De-oxygenated blood at
different light wavelength (Izzetoglu et al., 2007).
This project uses wristband which consists of
pairs of infrared emitters and receivers to measure
the light reflected or scattered through/off the wrist.
There have been some previous works (McIntosh
et al., 2017), that demonstrated NIR’s potentials for
non-invasive and accurate gestures recognition. In our
study, We explore further to improve the accuracy of
the NIR system in detecting gestures by developing a
system which is robust against skin-sensor coupling.
This study also explores the impact of the number and
configuration of the sensors on the overall accuracy
of the system. Two different wavelengths were also
tested to see the variation in accuracy at different light
absorption rates of tissues.
Hand Gesture Recognition based on Near-infrared Sensing Wristband
111

3 NIR WRISTBAND
IMPLEMENTATION
3.1 Wristband Hardware
The NIR wristband (shown in Figure 4) is composed
of 24 near-infrared emitters, 12 photo-diodes with an
on-chip trans-impedance amplifier. A controller is
used to switch the IR LEDs and sample the photo-
diodes output sequentially. The sampled data is then
used by a machine learning algorithm to classify fea-
tures into different gestures.
Figure 3: Block Diagram of NIR wristband: consists of the
wristband gesture sensing system, data acquisition and pro-
cessing.
Figure 4: The full NIR gesture sensing wristband hardware
setup: The data acquisition and IR LED control hardware.
The selection of emitters consider factors includ-
ing power consumption, optical power, and emitter-
detector spacing on the wristband. After testing dif-
ferent IR emitters to see the effect of radiant intensity
(12 - 1100 mW/sr) and light beam angle (6 − 130
◦
)
and emission wavelength on the received signal, we
chose MTMD7885NN24 multi-chip IR emitters that
have peak emission wavelengths at 770nm, 810nm,
and 850nm. We chose the photodiodes to be TI’s
OPT101 with an on-chip trans-impedance amplifier
and 1 Mohm feedback resistor creating a bandwidth
of 14kHz. The built-in trans-impedance amplifier re-
duces noise pick-up and space requirement, compared
to an external amplifier.
To generate a timed and synchronized PWM con-
trol signal sequence, a NI DAQ(USB-6353) device
was employed. The PWM sequence was generated
at a 20Hz frequency, with 4% duty cycle and 15 de-
grees phase shift of consecutive channels. It creates
a sequential switching of all emitters in 50 ms dura-
tion. A Darlington array ICs, ULN2803a (capable of
sinking up to 500 mA, 50V) was used to amplify the
control signal. The cascade connection of two transis-
tors in Darlington arrays creates the effect of a single
transistor with a very high current gain. The very high
β allows for high output current drive with a very-low
input current, essentially equating to operation with
low GPIO voltages. Current limiting resistors were
utilized to control the amount of current drawn by
the emitters. The acquired analog signal from each
photodiode amplifier was sampled at 16-bit resolution
and 9600 samples per second.
Compared to SenseIR (McIntosh et al., 2017), this
wristband hardware is developed with more IR emit-
ters, i.e., 24 IR emitters and a better mechanical wrist-
band design. This improvement increases the relative
prediction accuracy because the rigidity if the wrist-
band improves the robustness of the system to mis-
alignment errors. A careful analysis of the optical
power with respect to emitter-receiver spacing and IR
beam angle has also been done. The wristnband hard-
ware also features PCB connectors which are modular
and durable. Not only this reduces the cumbersome
cabling needed but also reduces noise pickups.
3.2 Machine Learning Software
The software of this study consists of four major
components: data collection, data processing, model
training, and both offline and real-time evaluation.
3.2.1 Data Collection
During this phase, the PWM waveform generation
and emitter control session are run continuously in
the background and scan the full 360 degrees of the
wrist at an effective frequency of 20Hz. During each
scanning of 360 degrees, 24 emitters are pulsed in
sequence, each generating a finite width rectangular
waveform.
The rising edge of emitter 1 triggers the analog
data acquisition and lasts for exactly 50ms. Since
the analog signal is sampled at 9600 samples/sec, 480
samples are acquired per channel in every full wrist
scan, which is referred to as one ’frame’. An example
of such a frame of data is shown in Figure 5
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
112

Figure 5: Matrix of Emitter-receiver measurements of a sin-
gle frame.
3.2.2 Data Processing
The data collected from each photodiode (channel)
are first filtered using a median filter of width five,
to suppress some narrow-width noises from exter-
nal near-infrared interference. The resulting data for
each channel, which is 480 samples, are then seg-
mented into 24 segments, each corresponding to the
time when a specific emitter has been switched on.
Because we have observed that each 20-sample seg-
ment appear to be almost flat in our experiment, we
computed the mean value as a representation for each
segment to reduce the size of data by a factor of 20.
In this way, the 480 samples per channel can be re-
duced to 24 samples, and a total of 12 channels sum
up to 288 samples per frame. These processed data
were input into both the model training and real-time
evaluation steps in this study.
3.2.3 Model Training
For several applications, wearable gesture recogni-
tion systems are required to function in real time with
comparable accuracy to those in offline modes. For a
gesture recognition system to operate in real-time, it
has to recognize a gesture in less than 300 ms equiv-
alent to 3Hz update rate (Benalc
´
azar et al., 2017).
Since wearable systems run on systems which needs
low computational complexity and low power sys-
tems, the primary challenge here is choosing a clas-
sifier which can exhibit good performance using less
complicated recognition models.
The labeled and processed data from the Data
Processing step are employed to train various ma-
chine learning models. We have explored the follow-
ing supervised learning classifiers: k-Nearest Neigh-
bors (kNN), Support Vector Machine (SVM), Linear
Discriminant Analysis(LDA), and Neural Networks
(NN). After a series of accuracy comparison for dif-
ferent models, a shallow neural network worked best
for our context. Therefore we will focus on describing
this model. The shallow neural network that we chose
was a single-layer fully connected network, with the
hidden layer consisting of 56 hidden nodes. The ac-
tivation function was set to be the rectified linear unit
(ReLU) function, and the cost function was a negative
log-likelihood function. During training, one epoch
of data was divided into batches of the size of 600,
and a total of 1000 epochs were trained, after which
the changes in both accuracy and cost-function value
falls below a small threshold. No dropout or batch
normalization was applied during training, because
this model is relatively simple, and it already general-
ized pretty well without these tricks.
3.2.4 Model Evaluation
We performed both offline evaluation of the trained
model using the collected data, also real-time eval-
uation by applying the trained model on real-time
streamed sensor data.
1. For offline evaluation, a typically collected
dataset usually consists of 10 trials. 10-fold cross-
validation was performed by training on any nine
trials and validating on the other one trial of data.
Both validation accuracy and confusion matrices
were averaged over all ten folds and served as a
metric of gesture classification performance.
2. For real-time evaluation, a real-time software
streamed frames of raw sensor data from the
wristband hardware, and performed the same
data-processing procedure on each frame, and
invoked model inference employing the trained
model to predict the gesture of the current frame.
The real-time evaluation software can update a
new gesture at 6-8Hz.
4 USER STUDY DESIGN
To assess the performance of the built wristband, hand
gesture sensing studies were conducted across multi-
ple subjects. To better compare our results with a pre-
vious study done by SenseIR (McIntosh et al., 2017),
we designed the studies to replicate the set-ups in
SenseIR as much as possible. Specifically, a total of
four pinch gestures (Index Pinch, Middle Pinch, Ring
Pinch, and Little Pinch), six common gestures (Fist,
Spread, Call, Gun, Index Point, and Thumbs up), and
three wrist gestures (Wrist Flexion, Wrist Extension,
and Wrist Abduction) were chosen, as shown in Fig-
ure 6.
Hand Gesture Recognition based on Near-infrared Sensing Wristband
113
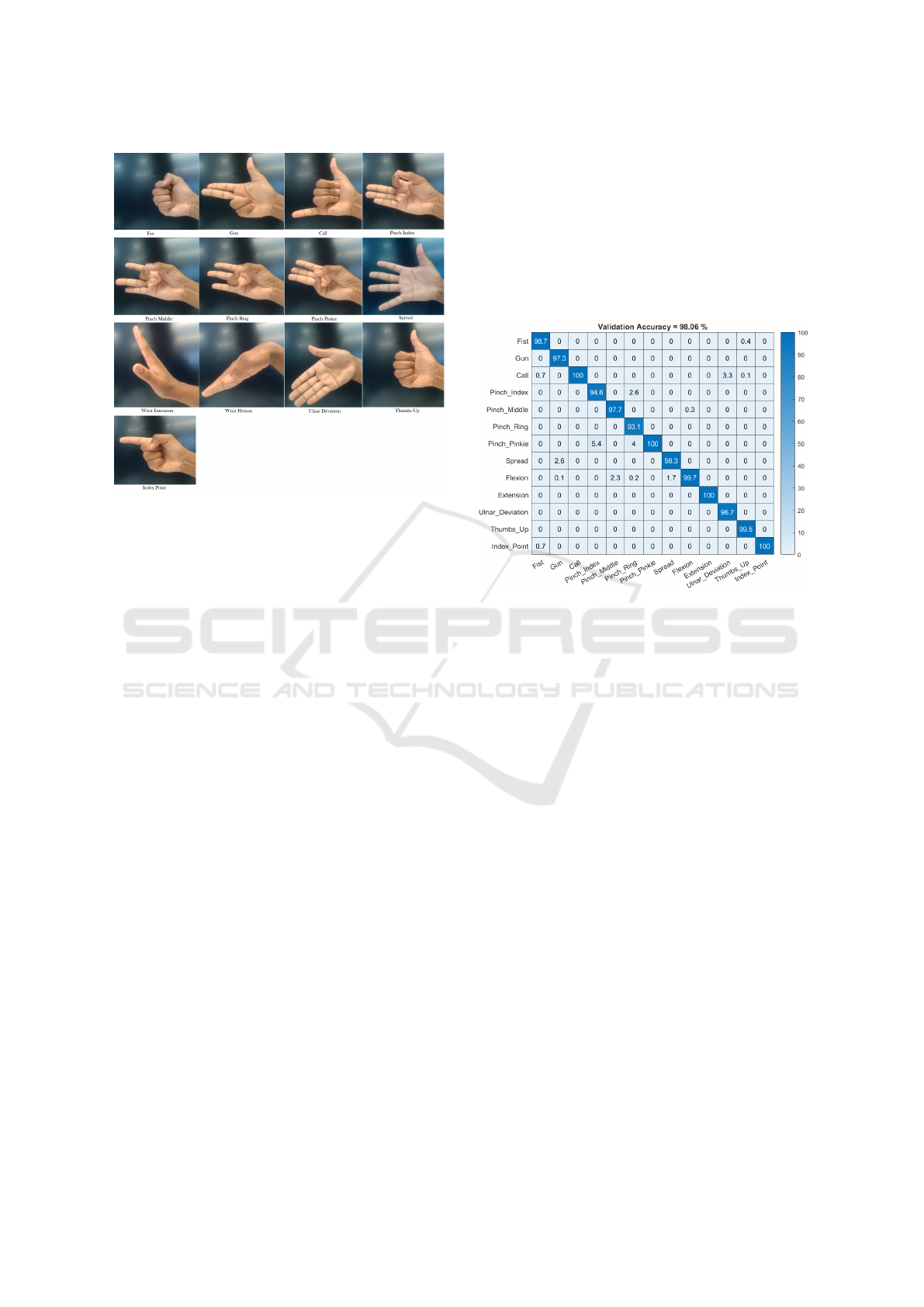
Figure 6: Set of gestures used in the User study: Total of
13 gestures consists of four pinch gestures (Index Pinch,
Middle Pinch, Ring Pinch, and Little Pinch), six common
gestures (Fist, Spread, Call, Gun,Index Point, and Thumbs
up), and three wrist gestures (Wrist Flexion,Wrist Exten-
sion, and Wrist Abduction).
All participant wore the wristband on their right
arm. Before the test, each subject was given some
time to practice the gestures. During a single trial, the
subject was prompt to perform all 13 gestures in a ran-
dom sequence specified by the software, each gesture
for 5 seconds. The randomness in gesture sequence
can enhance the generalization of the machine learn-
ing model.
A total of 10 trials of data were collected for each
subject. Data corresponding to the first 2 seconds of a
new gesture was truncated, because we observed that
the raw sensor signals would fluctuate to difference
extents during this transitioning time, this truncation
can provide more stabilized signals for each gesture.
The labels of the data were simultaneously created
and time stamped.
5 RESULTS
In our study, the confusion matrix was computed to
serve as the metric of performance. The confusion
matrix is a N
gesture
by N
gesture
matrix, each entry is
strictly between 0 and 100, with the i-th column and j-
th row indicating the percentage of i-th gesture (true)
being classified as the j-th gesture, during valida-
tion. Its diagonal elements imply the percentage of
each gesture being classified correctly, whose average
value is a quantitative measure for the performance
of the trained model, therefore denoted as ”validation
accuracy” for the rest of the study. The confusion ma-
trix is always averaged over all folds during the 10-
fold cross-validation. The confusion matrix (shown
in Figure 7) corresponds to the confusion matrix av-
eraged over all ten subjects, and all ten folds for each
subject. The validation accuracy over all subjects is
98.06% with the standard deviation of ± 1.82%.
Figure 7: Confusion Matrix - The mean validation accuracy
across 10 participants for each gesture.
The prediction accuracy is observed to be less for
less-pronounced gestures. i.e., pinch gestures and
other gestures which only involve the movement of
a single finger. This is because the pinch gestures use
common muscle group. However, wrist gestures, ges-
tures which rotate the whole hand around the wrist
joint are easily recognized by the ML algorithms. In
addition, other experiments were designed to investi-
gate the impact of the number of sensors, sensor cov-
erage area and density, peak emission wavelength of
the IR emitters, and motion artifacts (particularly arm
rotations) on the sensing performance:
1. Number of sensors: From a dataset collected on
the full setup (24 emitters and 12 detectors), we
removed some data to create combination setups
with different number of emitters (6, 12, 24) and
detectors (6, 12) as shown in Figure 8, Where
the blue circles indicate the active IR emitters
and the blue rectangles indicate the active IR re-
ceivers. We only reduce the numbers of emit-
ters and detectors in the new setups, both are still
equally spaced around the wrist. The results show
a small decrease in accuracy for less number of
sensors. However, the small variation in accu-
racy for different emitter and receiver combina-
tion shows that it is still possible to get a reason-
ably high accuracy with less number of sensors.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
114
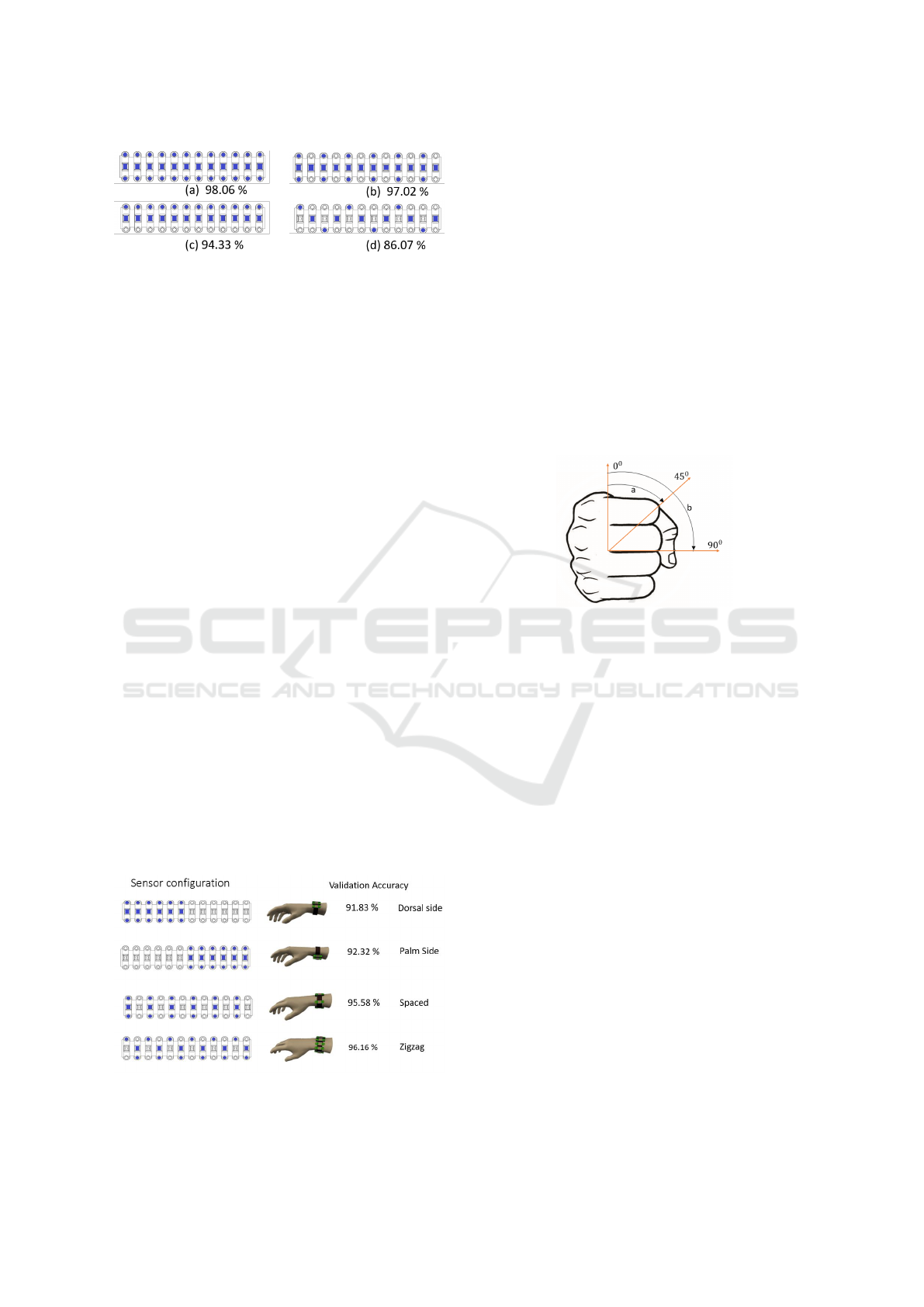
Figure 8: Number of sensors used in the test versus their
corresponding Validation accuracy: (a) 24 emitters and 12
receivers (b) 12 emitters and 12 receivers (b) 12 emitters
and 12 receivers (c) 6 emitters and 6 receivers.
2. Peak emission wavelengths: Two wavelengths,
770 nm, and 850 nm, are tested in an experiment
with a 12-emitter-12-detector configuration. The
resulting validation accuracies for the two wave-
lengths are 94.33% and 93.37%, respectively. The
changes in accuracy are not significant between
the chosen two wavelengths.
3. Sensor coverage area: For hand gestures, more
useful signals may concentrate on specific regions
of the wrist. Sensor configuration, particularly
sensor density in some regions of the wrist and
the overall coverage area of the wristband should
also be carefully designed to keep the trade-off be-
tween the accuracy of the system and wristband
complexity or cost. In Figure 9, we showed the
variation in accuracy for different sensor config-
uration of 12 emitters and 6 receivers wristband.
This result shows that the sensors can be concen-
trated to a particular side of the wrist without a
significant variation in accuracy. The sensors can
also be arranged in a low-density configuration to
include other complementary types of sensor such
as EMG, inertial and pressure sensors which can
be used to reduce the practicality issues related
with the NIR wristband. However, the results
also show covering more wrist area with sensors
can give slightly better results than having sensors
concentrated in a particular area.
Figure 9: Different sensor configurations Vs Validation ac-
curacy for 12 emitters and 6 receivers.
4. Arm rotation: We have found that the rotation of
the arm introduces a relatively significant change
in the near-infrared signals. Therefore a signifi-
cant error may be observed if the arm rotation an-
gles during training and validation are different.
This problem can be solved by introducing vari-
ous arm orientations during training or including
the orientation information from additional sen-
sors during both training and validation. We per-
formed a preliminary study in which data corre-
sponding to three different arm rotations (0
◦
, 45
◦
,
90
◦
) were collected (as shown in Fig. 10) Valida-
tion accuracies were computed by training on the
0
◦
data and validating on the 45
◦
and 90
◦
data.
The accuracy of the system reduces to 74% and
68% for arm rotation of 45
◦
and 90
◦
respectively.
Figure 10: Hand or fore-arm Rotation Test: Data is col-
lected by rotating the hand from 0 degrees to 45 and 90
degrees.
6 DISCUSSION
From the experiments conducted and observations
during those experiments, we distinguished some fac-
tors that affect the model training and recognition pre-
diction algorithms.
• Misalignment of the IR sensors: This problem
mainly happens for multiple session tests when
the user takeoff the wristband and wear it again.
However, the shift can also happen while the user
wears the wristband in single session tests. The
misalignment can happen either by rotational dis-
placement or longitudinal displacement on the
wrist. The position of the sensors will be dis-
placed from the training position causing the shift
for the order of the features. Since the wristband
is sensitive for a shift in millimeters, manual cali-
bration is very difficult. Every time the wristband
shifts, the position/orientation of the wristband
with respect to a reference position should be cal-
culated. The reference position can be recognized
using a specific gesture which shows strong fea-
tures or a significant change in the signal. After
Hand Gesture Recognition based on Near-infrared Sensing Wristband
115

the position is detected, reassignment of the chan-
nels can be used to maintain the order of the fea-
tures without rotating the wristband.
• Arm movement: motion artifacts are the other ma-
jor problem in NIR systems. The motion of the
hand (arm rotation, elongation, elevation) causes
blood movement and muscle/tendon movement.
These movements cause an unwanted change in
the signal. It is difficult to solve this problem en-
tirely by including the arm movement information
in the study or machine learning training proce-
dures. However, it can be reduced by training
the different arm rotations and elevations for the
same gesture. An additional sensors output such
as IMU orientation data can also be used to com-
pensate for the arm rotation problem.
• Skin-sensor Coupling: Even though NIR wrist-
band does not suffer from any electrical sensor-
skin coupling unlike EMG and EIT techniques,
They still suffer from problems caused by me-
chanical coupling between the sensor and the
skin. This is mainly because light can be reflected
directly from the skin without entering the skin
tissue, thereby causing the saturation of photo-
diodes. This problem can be reduced by using an
appropriate mechanical wristband design which
can keep the coupling constant.
• IR interference: IR light from external IR sources,
e.g., The sun, IR illuminating cameras adds noise
on the main signal. In order to remove these
noises, enclosing the outer part of the wristband
with IR block film can be a potential solution. The
other solution can be a differential measurement
of the external IR and subtraction from the main
signal.
7 CONCLUSION
This paper presents a wrist-worn gesture sensing sys-
tem that consists of an array of an Infrared Emitter and
Photo-Receivers that are used to detect gestures by
measuring reflected and refracted light from tissues in
or under the skin. In this study, we have demonstrated
that Near-infrared wristbands can offer a low-cost and
high accuracy gesture sensing possibility. With the
advancement of ultra-miniature SMD IR emitters and
receivers, these techniques can be easily integrated
to wrist-worn devices such as smart-watches and Fit-
bit monitors. The system’s software consists of data
acquisition, preprocessing and classification stages.
Thirteen classes of gestures were analyzed to vali-
date the accuracy of the classification algorithm. Fu-
ture works include data collection and processing for
cross-session and cross-user performance. Integration
with orientation sensors and pressure sensors should
be investigated as a potential solution to enable recog-
nition of arm rotation and pressure distribution around
the wrist. Development of embedded data acquisition
and wireless data transfer methods can also be imple-
mented for entirely wearable and wireless wristband
gesture sensing system.
REFERENCES
Benalc
´
azar, M. E., Jaramillo, A. G., Zea, A., P
´
aez, A., An-
daluz, V. H., et al. (2017). Hand gesture recogni-
tion using machine learning and the myo armband. In
Signal Processing Conference (EUSIPCO), 2017 25th
European, pages 1040–1044. IEEE.
Boyali, A. and Hashimoto, N. (2016). Spectral collaborative
representation based classification for hand gestures
recognition on electromyography signals. Biomedical
Signal Processing and Control, 24:11–18.
Chaiken, J., Deng, B., Goodisman, J., Shaheen, G.,
and Bussjaeger, R. J. (2011). Analyzing near-
infrared scattering from human skin to monitor
changes in hematocrit. Journal of biomedical optics,
16(9):097005.
Colac¸o, A., Kirmani, A., Yang, H. S., Gong, N.-W.,
Schmandt, C., and Goyal, V. K. (2013). Mime: com-
pact, low power 3d gesture sensing for interaction
with head mounted displays. In Proceedings of the
26th annual ACM symposium on User interface soft-
ware and technology, pages 227–236. ACM.
Dementyev, A. and Paradiso, J. A. (2014). Wristflex: low-
power gesture input with wrist-worn pressure sensors.
In Proceedings of the 27th annual ACM symposium on
User interface software and technology, pages 161–
166. ACM.
Freeman, W. T. and Weissman, C. D. (1997). Hand gesture
machine control system. US Patent 5,594,469.
Fukui, R., Watanabe, M., Shimosaka, M., and Sato, T.
(2014). Hand-shape classification with a wrist contour
sensor: Analyses of feature types, resemblance be-
tween subjects, and data variation with pronation an-
gle. The International Journal of Robotics Research,
33(4):658–671.
Huang, Y., Guo, W., Liu, J., He, J., Xia, H., Sheng, X.,
Wang, H., Feng, X., and Shull, P. B. (2015). Prelim-
inary testing of a hand gesture recognition wristband
based on emg and inertial sensor fusion. In Interna-
tional Conference on Intelligent Robotics and Appli-
cations, pages 359–367. Springer.
Izzetoglu, M., Bunce, S. C., Izzetoglu, K., Onaral, B., and
Pourrezaei, K. (2007). Functional brain imaging us-
ing near-infrared technology. IEEE Engineering in
Medicine and Biology Magazine, 26(4):38.
Kerber, F., L
¨
ochtefeld, M., Kr
¨
uger, A., McIntosh, J., Mc-
Neill, C., and Fraser, M. (2016). Understanding same-
side interactions with wrist-worn devices. In Pro-
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
116

ceedings of the 9th Nordic Conference on Human-
Computer Interaction, page 28. ACM.
Kim, D., Hilliges, O., Izadi, S., Butler, A. D., Chen, J.,
Oikonomidis, I., and Olivier, P. (2012). Digits: free-
hand 3d interactions anywhere using a wrist-worn
gloveless sensor. In Proceedings of the 25th annual
ACM symposium on User interface software and tech-
nology, pages 167–176. ACM.
Laput, G., Xiao, R., and Harrison, C. (2016). Viband: High-
fidelity bio-acoustic sensing using commodity smart-
watch accelerometers. In Proceedings of the 29th An-
nual Symposium on User Interface Software and Tech-
nology, pages 321–333. ACM.
McIntosh, J., Marzo, A., and Fraser, M. (2017). Sensir: De-
tecting hand gestures with a wearable bracelet using
infrared transmission and reflection. In Proceedings
of the 30th Annual ACM Symposium on User Inter-
face Software and Technology, pages 593–597. ACM.
McIntosh, J., McNeill, C., Fraser, M., Kerber, F.,
L
¨
ochtefeld, M., and Kr
¨
uger, A. (2016). Em-
press: Practical hand gesture classification with wrist-
mounted emg and pressure sensing. In Proceedings of
the 2016 CHI Conference on Human Factors in Com-
puting Systems, pages 2332–2342. ACM.
Nielsen, K. P., Zhao, L., Stamnes, J. J., Stamnes, K., and
Moan, J. (2008). The optics of human skin: Aspects
important for human health. Solar radiation and hu-
man health, 1:35–46.
Peck, C. C. (2003). Gesture sensing split keyboard and ap-
proach for capturing keystrokes. US Patent 6,630,924.
Rekimoto, J. (2001). Gesturewrist and gesturepad: Un-
obtrusive wearable interaction devices. In Wearable
Computers, 2001. Proceedings. Fifth International
Symposium on, pages 21–27. IEEE.
Truong, H., Nguyen, P., Bui, N., Nguyen, A., and Vu, T.
(2017). Low-power capacitive sensing wristband for
hand gesture recognition. In Proceedings of the 9th
ACM Workshop on Wireless of the Students, by the
Students, and for the Students, pages 21–21. ACM.
Wen, H., Ramos Rojas, J., and Dey, A. K. (2016). Serendip-
ity: Finger gesture recognition using an off-the-shelf
smartwatch. In Proceedings of the 2016 CHI Confer-
ence on Human Factors in Computing Systems, pages
3847–3851. ACM.
Zhang, Y. and Harrison, C. (2015). Tomo: Wearable, low-
cost electrical impedance tomography for hand ges-
ture recognition. In Proceedings of the 28th Annual
ACM Symposium on User Interface Software & Tech-
nology, pages 167–173. ACM.
Zhang, Y., Xiao, R., and Harrison, C. (2016). Advancing
hand gesture recognition with high resolution elec-
trical impedance tomography. In Proceedings of the
29th Annual Symposium on User Interface Software
and Technology, pages 843–850. ACM.
Hand Gesture Recognition based on Near-infrared Sensing Wristband
117
