
Simultaneous Flexible Keyword Detection and Text-dependent Speaker
Recognition for Low-resource Devices
Hiroshi Fujimura, Ning Ding, Daichi Hayakawa and Takehiko Kagoshima
Toshiba Research and Development Center, Komukai-Toshiba-cho 1, Saiwai-ku, Kawasaki, 212-8582 Japan
Keywords:
Keyword Detection, Speaker Identification, Low Resource Device, Bayesian.
Abstract:
This paper proposes a new method for simultaneous flexible keyword detection and text-dependent speaker
identification using a recognized keyword. The purpose is to identify a speaker from among a set of pre-
registered speakers on the basis of a short-command utterance in an office or home on low-resource chip
devices. The first contribution is to construct the process that includes a neural network (NN) and a customized
Viterbi-based algorithm for flexible keyword detection, and Gaussian mixture models (GMMs) for speaker
identification. Outputs of a middle layer in the NN and alignment information for keyword detection are also
used for creating feature vectors for speaker GMMs. The second contribution is to apply DropConnect in
speaker-modeling uncertainties of the Bayesian NN that is used for speaker reacognition. It results in robust
speaker models when enrollment utterances are few. Evaluation was conducted using 39 Japanese keywords
by 100 speakers. Recognition performance was measured on the basis of false acceptances and false rejects
using keyword utterances. Speaker identification for 100 pre-registered speakers for recognized keywords was
simultaneously evaluated. The identification rate when using a conventional i-vector method was 71.22%. By
contrast, the identification rate of the proposed method was 89.29% while using low-cost resources.
1 INTRODUCTION
In recent years, there has been an increasing de-
mand for keyword detection and speaker identifica-
tion working together as part of a user interface for
small devices (Wu et al., 2018; Chen et al., 2014; Var-
iani et al., 2014; Chen et al., 2015b). They are being
developed for smart speakers, home appliances, and
other devices in the home or the office. Some are im-
plemented on an embedded chip. The use of wake up
words tends to be resistant to false acceptance errors.
However, direct control of certain specific devices by
voice command without the use of wake up words is
more convenient. Moreover, many convenient appli-
cations can be created if a device identifies a speaker.
For example, a user only says “Turn on A/C” to
start an air conditioner with a setting of comfortable
temperature for the user. In this kind of scenario, the
speaker identification has only to select one speaker
from among a set of registered speakers using the rec-
ognized keyword utterance.
Many studies focus on keyword detection and
speaker identification, independently. However, they
should be simultaneously considered for implement-
ing into low-resource devices in the real world, and
it is important both from theoretical and application
perspectives.
An i-vector representation is widely used for
speaker identification (Dehak et al., 2011). However,
an i-vector is generally designed to be used on speech
lasting for at least 2 s (Kanagasundaram et al., 2011;
Poddar et al., 2015; Tsujikawa et al., 2017). On the
other hand, the duration of keywords for controlling
devices is usually about less than 1 s. Thus, it is diffi-
cult to achievegood enough accuracyof speaker iden-
tification using keywords by an i-vector method.
Some methods for applying i-vectors to short
keywords using a training data-set based on target
keywords have been proposed (Variani et al., 2014;
Larcher et al., 2012). Another approach for speaker
identification using a short keyword is to introduce
neural network (NN)-based features (Variani et al.,
2014; Chen et al., 2015b; Chen et al., 2015a; Sny-
der et al., 2018). In (Variani et al., 2014; Chen et al.,
2015b), a NN for speaker identification is first con-
structed for a specific keyword using substantial data
on the keyword. Then, the NN outputs probabilities
for all speaker IDs. During enrollment and evalua-
tion, the method calculates output activations of the
last hidden layer that includes speaker information for
Fujimura, H., Ding, N., Hayakawa, D. and Kagoshima, T.
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices.
DOI: 10.5220/0008903202970307
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 297-307
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
297

the purpose of extracting feature vectors. These con-
ventional methods require a training data-set based on
target keywords. Therefore the keyword set must be
fixed. This restriction disable the methods from ap-
plying to various applications requiring customization
of the keywords by users, dynamic keywords by ser-
vice providers. The computational cost of using ad-
ditional NNs for speaker identification (Variani et al.,
2014; Chen et al., 2015b; Chen et al., 2015a; Snyder
et al., 2018) is also crucial for low-resource devices,
and so on.
As a different approach of speaker identifica-
tion, the hierarchical multi-layer acoustic model
(HiLAM) (Larcher et al., 2014) is proposed. It
is based on the concept of a text-dependent hidden
Markov model (HMM) with Gaussian mixture mod-
els (GMMs) for exploiting alignment information of
keywords. Speaker-specific HMMs are trained us-
ing only enrollment data. Therefore, the method
don’t need a training data-set based on target key-
words. However, in addition to calculation cost of
keyword detection, the HMMs calculation cost for
each speaker does not match for low-resource de-
vices. Therefore, we focus on simple GMMs meth-
ods (Hebert and Heck, 2003; Sturim et al., 2002) in
this paper.
Above described, many studies focus on speaker
identification based on recognition of a specific key-
word with enough data-set based on the target key-
word. Further, they consider keyword detection and
speaker identification separately. In this paper, we
construct a consistent method of simultaneous flex-
ible keyword detection and text-dependent speaker
identification with maintaining the low computational
cost. Furthermore, the method creates robust speaker
models on the proposed algorithm.
The first contribution is to propose a consistent
and efficient algorithm for simultaneous flexible key-
word detection and text-dependent speaker identifica-
tion for low-resource devices. A low-cost calculation
method for flexible keyword detection is introduced
using a customized Viterbi algorithm (Nasu, 2016)
with NN scores. By adopting the algorithm that fo-
cuses only keyworddetection, the calculation cost can
be reduced compared to the conventional Viterbi al-
gorithm. To avoid increasing computational cost for
speaker identification, the proposed method employs
middle-layer outputs in the flexible keyword detec-
tion NN as feature vectors. This method does not
need the data-set based on the target keywords pre-
pared in advance. GMMs are constructed using the
feature vectors for registered speakers. Finally, likeli-
hoods of keyword utterances output by the GMMs are
compared.
The second contributionis to create robust speaker
models on the proposed algorithm. Speaker identi-
fication using only registered utterances by users is
a kind of few-shot learning, in which it is important
to reduce the amount of training data without perfor-
mance degradation.
During the enrollment stage for creating speaker
models, a user is required to utter keywords multiple
times. To reduce a user burden, the number of ut-
terances during the enrollment stage should be mini-
mized. Even so, the speaker models must sufficiently
cover variation in the environment and user speech.
To overcome the problem, the proposed method uses
the DropConnect method (Wan et al., 2013) when cre-
ating speaker GMMs. Normally, DropConnect is ap-
plied to NN training for creating robust NN models.
In this paper, it is used for estimating uncertainties of
GMMs in speaker modeling. The proposed method
augments feature vectors of middle-layer outputs us-
ing the DropConnect method to cover variation. It is
based on Bayesian theory for uncertainty (Gal, 2016).
Finally, speaker GMMs are created using the aug-
mented feature vectors to estimate the uncertainty.
This method does not influence the calculation cost of
speaker identification process. Therefore, it can main-
tain low-resource-cost computation.
2 OVERVIEW OF THE
PROPOSED METHOD
Figure 1 shows an overview of the enrollment pro-
cess. First, each frame feature vector is input to a NN
for keyword detection. This NN outputs probabili-
ties for phoneme states and feature vectors for speaker
identification on the basis of a middle layer. Recogni-
tion is based on a method introduced in Section 3 us-
ing probabilities that have been output from the NN.
A feature vector from the middle layer is transformed
into many feature vectors in accordance with multiple
DropConnect patterns to estimate the uncertainty. Fi-
nally, speaker models are constructed using the trans-
formed feature vectors and recognition alignment in-
formation.
In the speaker-identification step, averaged vec-
tors for phoneme-state segments of a recognized key-
word are calculated on the basis of a speaker utter-
ance. The averaged vectors are input to each of the
speaker models to estimate a likelihood score. The
speaker with the highest score is selected from among
the set of registered speakers as the output. A detailed
diagram for speaker modeling to register speakers is
shown in Fig. 2. A detailed diagram for speaker iden-
tification is shown in Fig. 3. The keyword detection
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
298
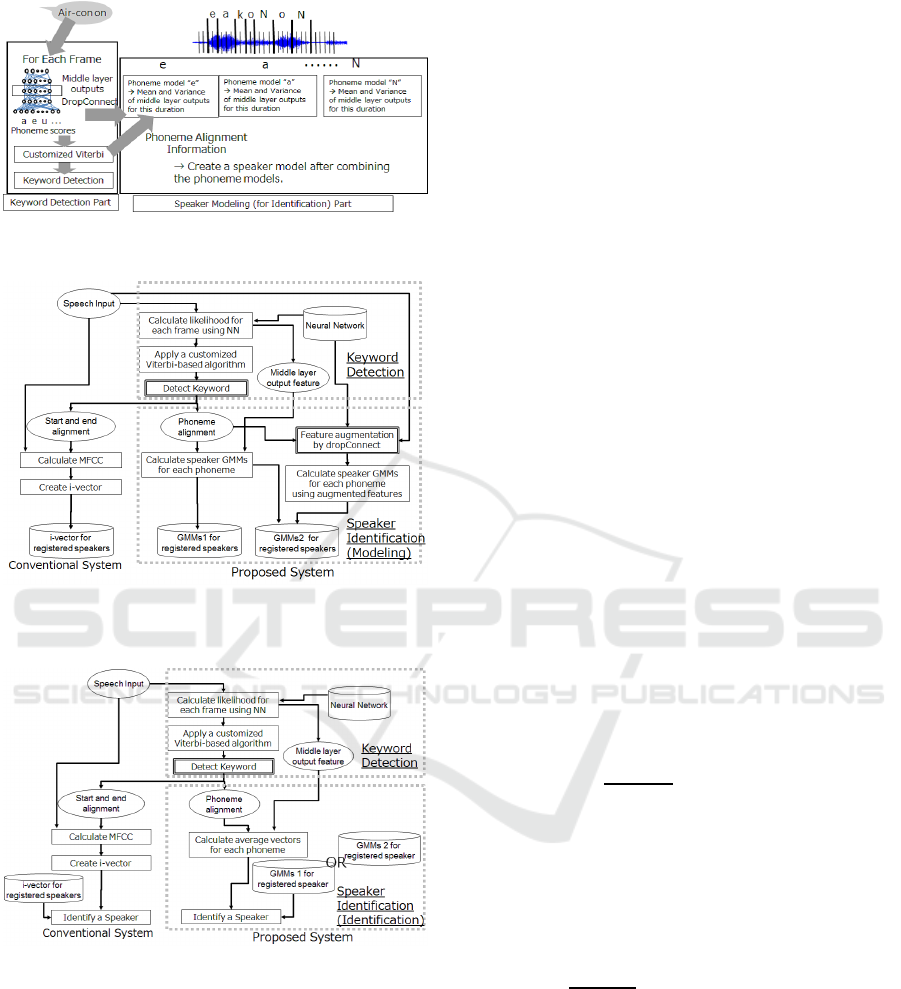
Figure 1: Overview of the proposed method.
Figure 2: A detailed block diagram of the proposed method
and the conventional i-vector method for speaker modeling.
Figure 3: A detailed block diagram of the proposed method
and the conventional i-vector method for speaker identifica-
tion.
process is common for speaker modeling and identi-
fication. The explanation of the detection is given in
Section 3, and the explanation of speaker modeling
and identification is given in Section 4.
3 KEYWORD DETECTION
The process of keyword detection is shown in
”Process-Detection” in Fig. 2. First, phoneme-state
probability is calculated for each frame using a NN.
Next, a customized Viterbi-based algorithm is applied
as a flexible keyword detector.
A flexible keyword-detector with low calculation
cost using phoneme-state probability was proposed in
(Zhu, 2017). A score for a target keyword to be rec-
ognized is calculated by summation of phoneme-state
probabilities in a sliding window. It can avoid a heavy
calculation cost of a conventional Viterbi algorithm
that is usually used for keyword detection (Junkaw-
itsch et al., 1996). However, this method needs to
control the size of the window, and the score is ap-
proximated.
To avoid degradation by approximation, we adopt
the algorithm proposed in (Nasu, 2016) for recogni-
tion of flexible keywords. The method is based on dy-
namic programming using a left-to-right HMM. Key-
word HMMs consist of phoneme states. T and τ de-
note the total number of input frames and the frame
index, respectively. {x
τ
}
T
τ=1
denotes a time sequence
of speech feature vectors. N denotes the total number
of keyword phoneme-states, { j}
N
j=1
denotes the state
index, and score(x
τ
,q
τ
) denotes the local score for an
assigned state q
τ
in states (1,2,.., N) at frame τ. Q
denotes a set of {q
s
,q
s+1
,...,q
e
}. A keyword score
S(s,e) using HMMs for a segment from a start frame
s to an end frame e is calculated using the Viterbi al-
gorithm as follows:
S(s,e) =
1
e− s+ 1
max
Q
e
∑
τ=s
score(x
τ
,q
τ
). (1)
A keyword is detected and recognized using a pre-
defined threshold θ for a score S(s,e) when a speech
segment with S(s,e) > θ exists. To find the segment
by the frame t (t ∈ [1,T]), the calculation is defined as
follows:
max
s<t
1
t − s+ 1
max
Q
t
∑
τ=s
score(x
τ
,q
τ
) > θ. (2)
The computational cost is normally O (NT
3
) for the
calculation of many possible paths for each combina-
tion of s and e. Because the score S(s,e) is not needed
to know for the purpose of detection, the formula is
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices
299

arranged as follows:
max
s<t
1
t − s+ 1
max
Q
t
∑
τ=s
score(x
τ
,q
τ
) > θ,
⇔ max
s<t
max
Q
t
∑
τ=s
(score(x
τ
,q
τ
) − θ) > 0,
L(s,t) > 0,
where
L(s,t) = max
s<t
max
Q
t
∑
τ=s
(score(x
τ
,q
τ
) − θ).
(3)
This equation implies that normalization by t − s+ 1
is not needed for merely detecting a segment with
S(s,t) > θ. Algorithm 1 shows pseudo-code for our
method. L(s,t) is easily calculated by the algorithm.
Each lattice point only keeps the path with the max-
imum summation score searched from all of the pos-
sible paths with different starting points. On the
other hand, the conventional Viterbi algorithm re-
quires control of many hypotheses having different
starting points. In this method, the existence of a du-
ration with S(s,t) > θ is guaranteed by finding a dura-
tion with L(s,t) > 0. Therefore, the detection perfor-
mance is not degraded compared to the performance
of the conventional Viterbi algorithm. However, the
calculation cost is drastically reduced to O (NT). In
this paper, a simple and small feed forward NN is used
for the calculation of a phoneme-state score.
4 SPEAKER IDENTIFICATION
4.1 Speaker Modeling
Three speaker modeling processes are shown in
Fig. 2. One is the conventional method using i-vector,
and the process is shown in ”Conventional”. An-
other is the simple GMMs method shown in ”Pro-
posal1”. The other is the GMMs method using feature
augmentation shown in ”Proposal2”. In this section,
”Proposal1” is mainly introduced.
4.1.1 Feature
In the proposed method, features for speaker models
are derived from a predefined middle layer in the de-
tector NN.
One reason for using the keyword independent
features is that the training set including the key-
words for recognition cannot be collected prior to
user-definition of keywords in our flexible keyword
scenario though it is beneficial to construct robust
Algorithm 1: Detector Algorithm Procedure.
The score of the max path reached for state j of frame t
is L
t, j
.
The max path holds alignment information.
The state score for a state j of frame t is l
t, j
(l
t, j
< 0).
Initialize max path score L
0, j
= −∞( j = 1,.., N) and
L
0,0
= 0.
L(s,t) = L
t,N
. (L(s,t) is the same as eq. 3.)
For frame t(t = 1,..,T) : L
t,0
= 0,
Acoustic score for a state l
t, j
is calculated by a NN,
for j = 1 to N do
if L
t−1, j−1
> L
t−1, j
then
L
t, j
= L
t−1, j−1
+ l
t, j
(x
t
) − θ
The recorded alignment information including the
starting point s of L
t−1, j−1
is propagated.
else
L
t, j
= L
t−1, j
+ l
t, j
(x
t
) − θ
The recorded alignment information including the
starting point s of L
t−1, j
is propagated.
end if
end for
if L(s,t) = L
t,N
> 0 then
The keyword is recognized.
Go to speaker registration or identification step.
else
Go to (t + 1)th iteration.
end if
speaker identification features such as (Variani et al.,
2014; Larcher et al., 2012; Chen et al., 2015a).
Another reason is to avoid additional computation
cost of other NNs for feature extraction.
However, each layer in the NN recognition step
normalizes not only for channel and noise features,
but also for speaker features, because the NN is
trained to distinguish from among phoneme states.
Channel and noise environment influences should
be eliminated, but speaker identification information
should be retained. Therefore, the best feature can be
found in the outputs of middle layers, which are de-
scribed in Section 6.
4.1.2 Modeling
A Gaussian model (GM) is constructed using fea-
tures for each of the combinations of a speaker and a
phoneme-state existing in a keyword. Phoneme align-
ment is determined as a result of keyword detection,
as described in Section 3. To construct speaker GMs,
mean and variance are calculated for phoneme-state
segments. A lth-layer output vector is used as a fea-
ture vector. y
lτ
denotes an output vector of the lth
layer at the τth frame. W denotes the number of reg-
istered speakers. A speaker w(0 < w ≤ W) utters a
keyword that has N HMM-states, and the recognized
state sequence is Q. When the number of frames in a
state m(0 < m ≤ N) is M
m
in a state sequence Q, the
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
300
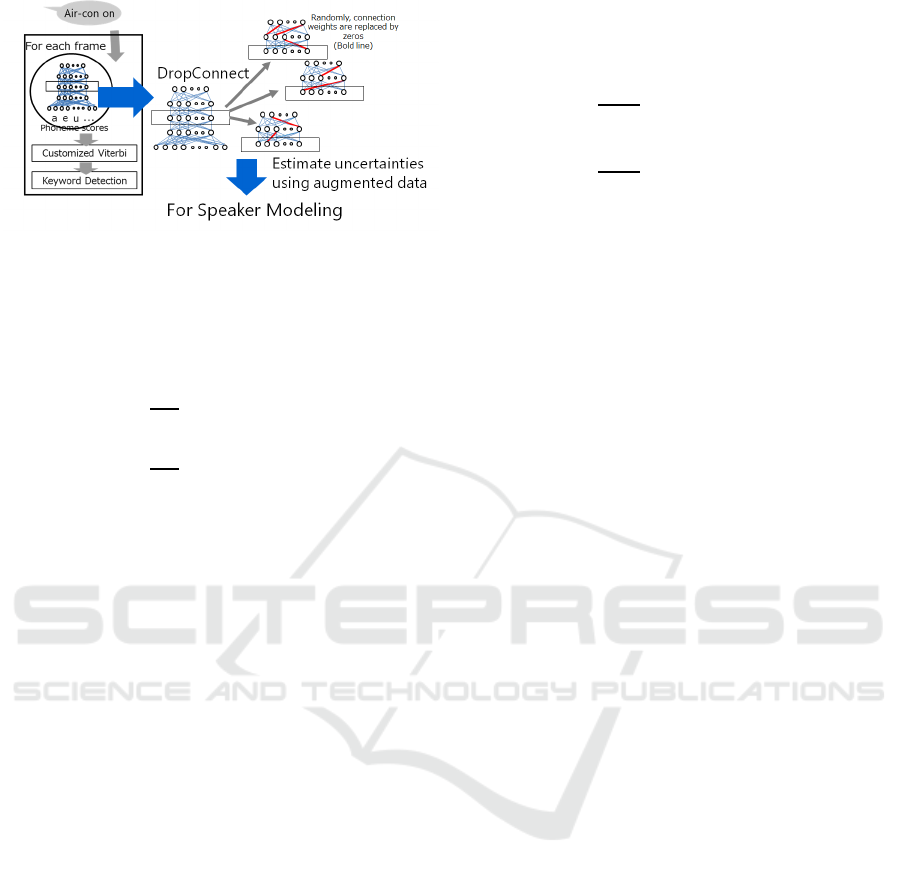
Figure 4: Overview of the DropConnect in Modeling Un-
certainty of Bayesian Deep Networks method.
mean µ
wlm
and the variance σ
2
wlm
for the state m of a
speaker w using the lth-layer output are calculated in
accordance with the following equations:
µ
wlm
=
1
M
m
∑
τ,q
τ
∈Q,q
τ
=m
y
lτ
, (4)
σ
2
wlm
=
1
M
m
∑
τ,q
τ
∈Q,q
τ
=m
(y
lτ
− µ
wlm
)
2
. (5)
For example, when the number of enrollment utter-
ances is three, Q
1
, Q
2
, and Q
3
denote recognized se-
quences. The mean and the variance are calculated
in Q = Q
1
∪ Q
2
∪ Q
3
. To cover the small variance,
”GMMs1” shown in Fig. 2 is composed of GMs cre-
ated by speaker features and a global one calculated
using speaker-and-keyword independent feature vec-
tors.
4.2 Modeling Uncertainty
This section explains the GMMs method using feature
augmentation shown in ”Proposal2” in Fig. 2. In this
process, the feature vectors of middle layer outputs
from a NN for keyword detection is augmented by a
DropConnect method using speech input to estimate
the modeling uncertainties.
In (Gal, 2016), the relation between model un-
certainty and stochastic regularization techniques
such as the dropOut method, multiplicative Gaus-
sian noise (Srivastava et al., 2014), and the Drop-
Connect method (Wan et al., 2013) are described.
In our method, this kind of technique is applied to
speaker model uncertainty. The DropConnect method
is chosen because it is better than the dropOut method
when estimating model uncertainty in (Mobiny et al.,
2019). Random layer-output is acquired through a
stochastic forward pass, to which DropConnect is ap-
plied. By repeating the process R times, sampling
outputs { ˆy
lτ1
,..., ˆy
lτR
} are acquired. Figure 4 shows
the overview of the proposed method. In (Gal, 2016;
Mobiny et al., 2019), the sampling outputs are empir-
ical samples from an approximate predictive distribu-
tion. A predictive mean µ
∗
wlm
and variance σ
∗2
wlm
are
approximated using Eqs. 6 and 7,
µ
∗
wlm
=
1
RM
m
∑
τ,q
τ
∈Q,q
τ
=m
R
∑
r=1
ˆy
lτr
, (6)
σ
∗2
wlm
=
1
RM
m
∑
τ,q
τ
∈Q,q
τ
=m
R
∑
r=1
( ˆy
lτr
− µ
∗
wlm
)
2
. (7)
The proposed method treats modeling uncertainty as
generativespeaker model uncertainty to support small
segment data. ”GMMs2” shown in Figure 2 is com-
posed of the GMs with augmentation and the GMs in
previous section.
4.3 Speaker Identification
Speaker identification process is shown in Fig. 3.
The conventional i-vector process shown in ”Conven-
tional”. Cosine similarity between the extracted i-
vector and each registered i-vector is calculated in the
process of the identification. On the other hand, the
process of the proposed method is shown in ”Pro-
posal” in Fig. 3. During testing for the proposed
methods, an averaged vector for each segment is cal-
culated and input to all speaker GMMs that have been
created for the keyword. Likelihoods calculated from
all speaker GMMs are compared, and a speaker with
the best likelihoods is selected as a result of speaker
identification.
5 EXPERIMENTAL SETUP
The proposed method recognizes a keyword, and the
speaker who has uttered the recognized keyword is
identified from among a set of registered speakers. To
this end, we have conducted two experiments on key-
word detection and speaker identification.
5.1 Evaluation Database
We evaluated the proposed method using a Japanese
command dataset recorded by a close-talking micro-
phone. The sampling rate was 16000 [Hz]. For the
evaluation, 39 keywords uttered 5 times by 100 speak-
ers (female:51, male:49) were used. Ten keywords
uttered 5 times by 50 speakers (female:25, male:25)
were used for development. The evaluation set did not
include any speakers in the development set. Table 2
and 4 show all keywords, and each averaged duration
[sec] for the development and evaluation sets.
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices
301
5.2 Evaluation Metrics
5.2.1 Recognition
Recognition performance was measured by the false
reject (FR) rate [%] and the number of false accepts
(FA). N
c
and N
all
denote the number of correctly
recognized keywords and the total number of utter-
ances, respectively. Therefore, FR = 100× (N
all
−
N
c
)/N
all
[%]. The value of FA was calculated us-
ing noises from the third CHiME challenge (Barker
et al., 2015). All noise files were concatenated to-
gether into a single file. The detector for all key-
words was executed for the concatenated file, and
the number of FA was calculated. Finally, the FA
count was normalized by the number of hours and the
number of keywords. Therefore, the metric was FA
[times/(hour · #keyword)].
5.2.2 Speaker Identification
For speaker identification, the evaluation metric for
all experiments was identification rate (IR) value [%].
Each speaker model output a score. The scores were
compared for only registered speakers. IR was calcu-
lated using the equation IR = 100 × C/N
c
, where C
was the number of utterances matched between a ref-
erence speaker and a selected speaker. There were 3
enrollment utterances for each keyword, and the re-
maining 2 utterances were evaluated after enrollment.
The utterances were cross-validated, for a total of 5
utterances covering all possible variations. In many
real use-cases of the proposed method, the number of
registered speakers is less than 100. This purpose is
to measure the identification performance, properly.
5.3 Model Preparation
5.3.1 Recognition
A detector was constructed using the method de-
scribed in Section 3. The algorithm needed an acous-
tic model to calculate the acoustic score for lattice
points at each frame. This system was designed to
work on small devices. Therefore, the size of acous-
tic model was very small , and contained fewer differ-
ences in comparison with a model designed for large-
vocabulary speech recognition.
The training set was the Japanese ATR
database (Kurematsu et al., 1990), which in-
cluded 270 hours of speech. Babble noise was
added to the training data to ensure robustness.
The basic characteristic was 32 Mel-filter bank
features compressed to 16 dimensions using an
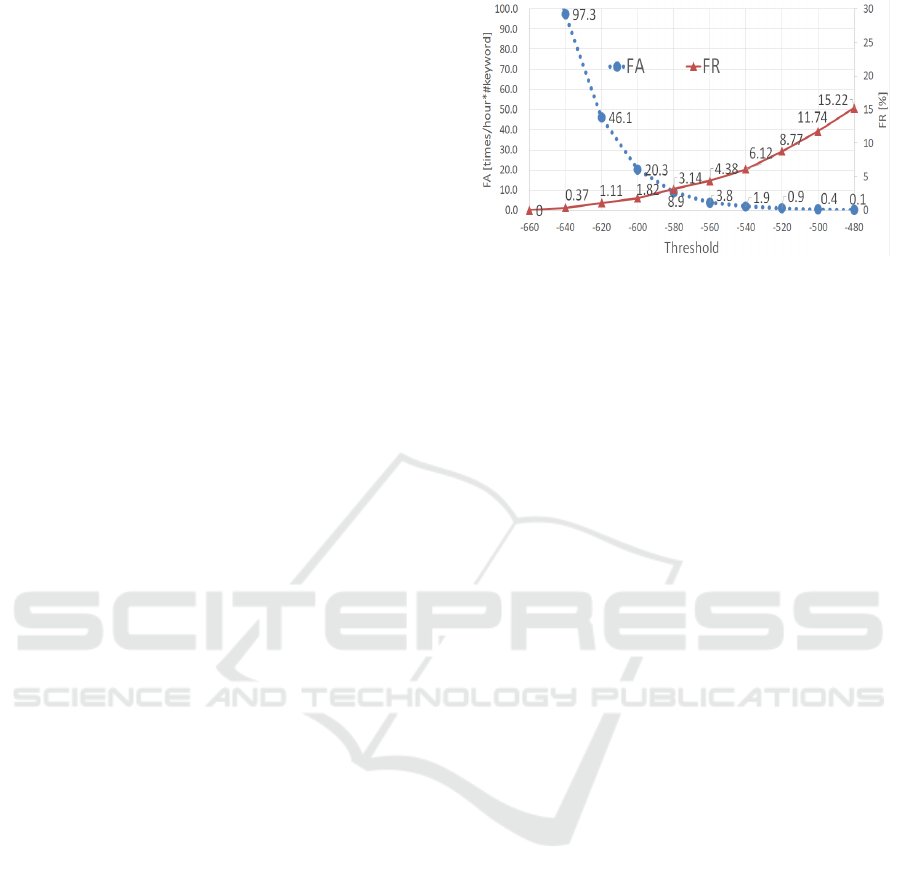
Figure 5: Detection performance FA-FR.
affine transformation. Mel-filter bank features were
normalized using a moving average. Input feature
vectors for the DNNs were created by concatenating
10 preceding and following frames, for a total of
21 frames. Therefore, the number of dimensions
was 16 × 21 = 336. Hidden layers were structured
as 128[unit] × 4[layer]. The activation function was
a sigmoid function. Final outputs comprised 4500
clustered phoneme-states.
5.3.2 i-vector Setup for Comparison
An i-vector-based method was constructed for the
comparison. The speaker-modeling process is shown
in ”Conventional in Fig. 2. Features comprised 19
Mel-frequency cepstral coefficients (MFCC), in ad-
dition to energy, the ∆, and the ∆∆. There were 60
dimensions in total. The i-vector was extracted us-
ing the ALIZE (Larcher et al., 2013) speaker iden-
tification library after normalization of features. A
2048-mixture universal background model and total
variability matrix were trained using the ATR dataset,
which included 3768 speakers. The number of i-
vector dimensions was 200. The parameter of i-
vector was similar as in (Tsujikawa et al., 2017). The
speaker-identification process is shown in ”Conven-
tional in Fig. 3. Similarity between a speaker refer-
ence i-vector and a non-reference i-vector was mea-
sured using cosine similarity. Keywords were ex-
tracted by the detector, and the extracted portions
were used for enrollment and evaluation.
6 EXPERIMENT USING
DEVELOPMENT SET
6.1 Recognition
The relation between FA and FR using the develop-
ment set is shown in Fig. 5. The score for a threshold
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
302

in Equation 2 was calculated using accumulation of
logarithm-of-output probabilities for lattice points in
a detected path. The threshold in Fig. 5 was the θ
in Equation 2 for all keywords. In all experiments,
a threshold of −540 was selected to avoid FA in
a noisy environment. Therefore, the total value of
the speaker-identification target for the development
set was 10(keywords)×50(speakers)×
5
C
2
× 2× (1−
0.0612) = 9388. The threshold was decreased by 10
until the keyword was recognized during enrollment.
6.2 Speaker Identification
6.2.1 Euclidean Distance and Simple GMMs
We first conducted experiments in which we mea-
sured the Euclidean distances between vectors of
phoneme-state features, as in (Dutta, 2007). The de-
tector output phoneme-state alignment, and averaged
vectors were calculated for each phoneme-state using
Eq. 4. For enrollment, vectors for each phoneme-state
segment of three utterances were averaged to create a
speaker vector. The speaker vectors were compared
to evaluation vectors from test utterances in accor-
dance with their Euclidean distances. The speaker
with the speaker vector closest to an evaluation vec-
tor was selected as an output speaker. A feature vec-
tor was extracted from each middle layer of the de-
tector NN before application of the sigmoid activa-
tion function. The structure of the hidden layers was
128[unit] × 4[layer] for the detector. Therefore, the
number of dimensions was 128 for a feature vector,
and 4 patterns from 4 layer-outputs were obtained.
”Euclid” in Tab. 1 represents the performance.
”Layer” means the use of the (1st, 2nd, 3rd, 4th) layer
output vector. Performance of the i-vector method
was 76.10%. Performance of the simple Euclidean
distance method was better than that of the i-vector
method. Therefore, alignment information has been
demonstrated to be important for speaker identifica-
tion using short keywords.
Next, the averaged vectors were replaced by
GMMs. The process is shown in ”Proposal1” in
Fig. 2. An averaged vector for each phoneme-state
was input to the speaker-GMMs that had been con-
structed from phoneme-state GMMs, and each of the
speaker-GMMs output a likelihood value for an ut-
terance to be recognized. To prevent an extremely
low score, GMMs were composed of a GM created
by speaker features and a global one. A global GM
was created in advance using training data. Weights
were equal for the two GMs. The output likelihoods
were compared to identify a speaker. For compen-
sation, a global variance σ
2
lg
and σ
∗2
wlm
were summed
after weighting. A global variance σ
2
lg
was calculated
using the training dataset.
Table 1 shows the simple GMM-based method
(GMM(0)). Clearly, the performance of the GMMs
was better than that of Euclid. Therefore, variance
was effective for the identification, even though there
were few enrollment data values.
6.2.2 GMMs using Augmented Feature Vectors
In this work, GMs created by augmented vectors
were added to the original GMMs described in Sec-
tion 6.2.1. The process is shown in ”Proposal2” in
Fig. 2. In this manner, three GMMs having equal
weights were constructed when augmented vectors
were applied. Feature vectors for speaker identifica-
tion were augmented using DropConnect. DropCon-
nect has a parameter ”drop rate” that can control the
rate of dropping connections of a NN. As a controlled
parameter, the number of augmentation iterations R
was also considered. We controlled the values of the
drop rates for all iterations simultaneously. For each
iteration, the best drop rate was selected from among
(10,20,30,40,50,60)%. The parameter set was one
for all keywords, and was not tuned for individual
keywords.
Table 1 shows the results when the parameters
were controlled. ( ) shows the number of iteration
R. It shows that augmentation was effective for all
layers. It shows the best performance for each layer
after controlling the drop rates. The best performance
was 91.65%, using the 4th-layer output in one-layer
output results. Without augmentation, the perfor-
mance of the first-layer output was the best. The
first-layer output included much speaker information,
but also other noise information. On the other hand,
deeper layers tended to eliminate other information
that had been excluded for phoneme-state discrimina-
tion. Therefore, augmentation was capable of com-
pensating for inner-speaker variation to maintain the
robustness even in the presence of other factors. Next,
outputs of both the first and the fourth layer were used
to exploit both features. Performance was represented
in Tab. 1 ”1st+4th”. The performance was 92.66%
when the number of iterations was 10. Table 2 shows
speaker identification performance for each keyword
using the development set.
7 EXPERIMENT USING
EVALUATION SET
We conductedthe experiment using the evaluation set.
The parameters controlled using the development set
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices
303
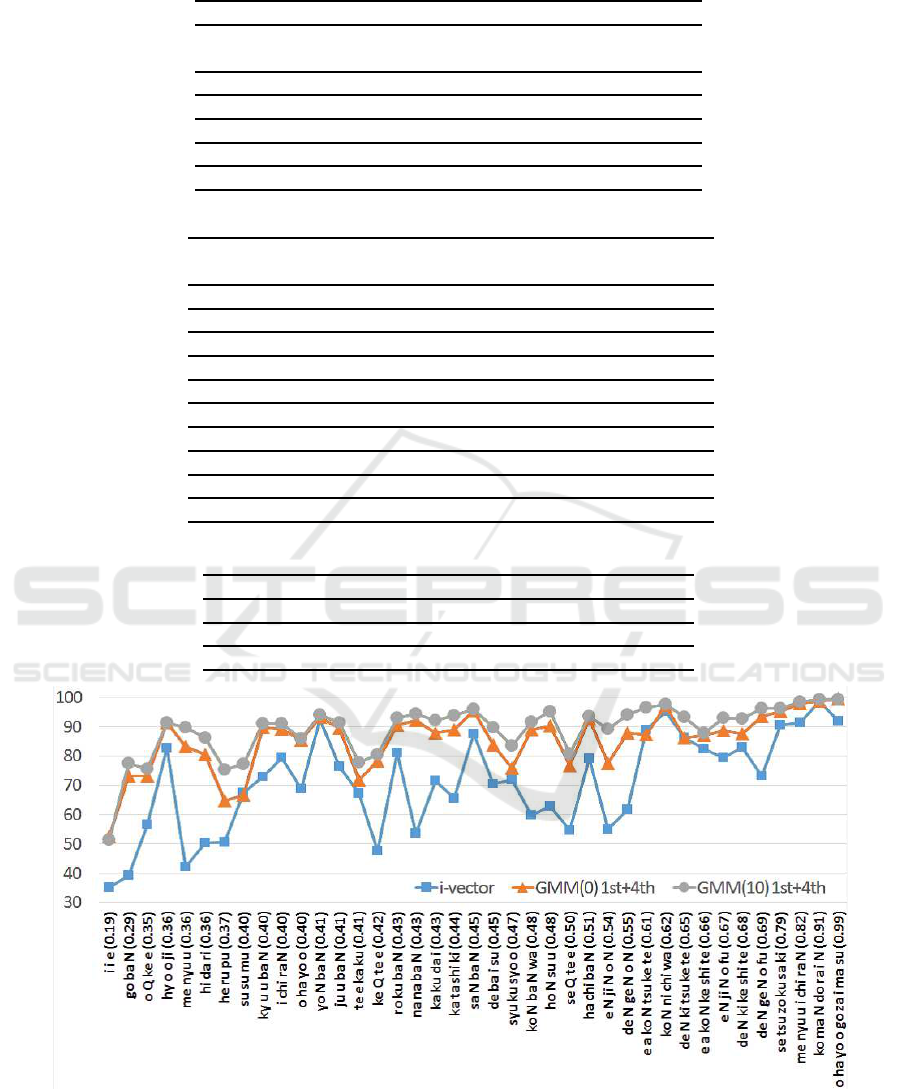
Table 1: Performance using the development set by IR [%].
i-vector 76.10
GMMs (#Iteration)
Layer Euclid (0) (3) (5) (10) (12)
1st 80.39 88.45 89.49 90.53 90.51 90.48
2nd 80.13 87.44 88.76 89.29 90.03 90.18
3rd 81.76 86.56 88.82 89.74 90.32 90.41
4th 84.42 87.87 90.29 91.07 91.65 91.63
1st+4th * 88.70 91.33 92.22 92.66 92.72
Table 2: Performance using the development set by IR [%].
Keyword Duration i-vector GMM(0) GMM(10)
[sec] 1st+4th 1st+4th
u shi ro 0.29 39.45 80.22 88.40
ja N pu 0.32 72.55 78.18 85.07
mo do ru 0.34 68.24 79.68 86.63
i chi ba N 0.40 87.84 85.88 90.1
kya N se ru 0.46 70.77 95.50 96.79
to ri ke shi 0.47 91.42 95.29 96.13
ri se Q to 0.48 82.57 81.29 88.65
ko ma N do 0.54 74.95 94.81 97.96
tu gi no pe e ji 0.74 86.61 97.98 97.98
ma e no pe e ji 0.75 85.08 96.95 98.21
Table 3: Performance using the evaluation set by IR [%].
i-vector 71.22
Layer 1st 2nd 3rd 4th 1st+4th
GMM(0) 86.39 85.21 83.88 84.51 85.87
GMM(10) 88.03 87.10 86.75 88.18 89.29
Figure 6: Speaker identification performance IR [%] using the evaluation set, and ( ) shows the averaged duration for each
keyword.
were used for the evaluation. FR was 8.21%, and FA
was 0.6 [times/hour · #keyword]. Speaker identifi-
cation was applied to the recognized keywords. Ta-
ble 3 shows the speaker identification performance.
The i-vector performance for speaker identification
was 71.22%.In contrast, the performance of the pro-
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
304
Table 4: Speaker identification performance using the evaluation set by Identification Rate [%].
Modeling i-vector GMM(0) GMM(10) GMM(0) GMM(10)
Feature MFCC 1st+4th layer 1st+4th layer
#enrollment
utterances 3 3 2
Keyword Dur.
[sec]
i i e 0.19 35.10 52.40 51.29 44.46 44.26
go ba N 0.29 39.11 73.10 77.44 67.30 72.58
o Q ke e 0.35 56.60 73.27 75.54 66.05 68.89
hy o o ji 0.36 82.75 91.40 91.40 86.40 87.10
me nyu u 0.36 42.06 83.24 89.65 76.59 85.24
hi da ri 0.36 50.35 80.58 86.05 72.52 80.07
he ru pu 0.37 50.62 64.77 75.43 56.92 67.57
su su mu 0.40 67.56 66.70 77.34 58.54 69.71
kyu u ba N 0.40 72.75 89.63 91.05 84.04 85.51
i chi ra N 0.40 79.31 89.14 90.98 83.03 85.37
o ha yo o 0.40 68.66 85.48 86.04 78.78 80.88
yo N ba N 0.41 92.30 93.31 94.01 88.33 89.24
ju u ba N 0.41 76.48 89.38 91.30 84.51 87.41
te e ka ku 0.41 76.48 89.38 91.30 64.68 72.17
ke Q te e 0.42 47.51 78.22 80.59 69.54 73.24
ro ku ba N 0.43 80.92 90.54 92.92 84.54 88.68
na na ba N 0.43 53.66 92.17 94.46 86.01 90.03
ka ku da i 0.43 71.57 87.82 92.26 83.24 88.74
ka ta shi ki 0.44 65.40 89.02 93.78 81.23 89.23
sa N ba N 0.45 87.57 95.32 96.07 90.84 92.05
de ba i su 0.45 70.35 83.86 89.64 75.18 82.33
syu ku syo o 0.47 71.74 75.77 83.34 70.17 78.70
ko N ba N wa 0.48 59.82 88.77 91.69 84.74 86.76
ho N su u 0.48 62.79 90.38 95.16 84.50 92.57
se Q te e 0.50 54.69 76.75 80.71 70.70 74.92
ha chi ba N 0.51 79.04 92.73 93.54 88.23 89.65
e N ji N o N 0.54 55.00 77.56 89.04 72.44 84.94
de N ge N o N 0.55 61.71 87.88 94.06 84.85 91.38
e a ko N tsu ke te 0.61 89.01 87.29 96.56 81.88 93.39
ko N ni chi wa 0.62 95.27 96.93 97.48 95.07 95.27
de N ki tsu ke te 0.65 86.23 86.23 93.35 83.02 88.19
e a ko N ke shi te 0.66 82.26 87.07 87.74 95.19 96.48
e N ji N o fu 0.67 79.32 88.58 93.03 86.43 90.44
de N ki ke shi te 0.68 83.02 87.46 92.63 84.33 88.14
de N ge N o fu 0.69 73.12 93.53 96.14 90.12 91.76
se tsu zo ku sa ki 0.79 90.51 95.18 96.30 92.12 93.57
me nyu u i chi ra N 0.82 91.26 97.84 98.53 93.95 95.74
ko ma N do ra i N 0.91 98.78 98.58 99.14 97.16 97.67
o ha yo go za i ma su 0.99 91.76 99.39 99.34 97.78 97.37
Average 0.51 71.22 85.87 89.29 80.96 85.11
posed method was 89.29% when the feature combi-
nation of ”1st” and ”4th” layer output (1th+4th) and
10 augment iterations (GMM(10)) were applied.
Figure 6 and Tab. 4 show speaker identification
performance for each keyword using the evaluation
set.
In Fig. 6, value in parentheses after each keyword
shows the averaged duration of the keyword. The
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices
305

order was sorted by the duration. The average du-
ration of all keywords was 0.51. ”i-vector (3utter-
ances)” shows i-vector results using three enrollment
utterances. ”GMM(0)1st+4th (3utterances)” and
”GMM(10)1st+4th (3utterances)” show the result of
GMM(0) and the result of GMM(10) using three en-
rollment utterances, respectively. ”GMM(0)1st+4th
(2utterances)” and ”GMM(10)1st+4th (2utterances)”
show the result of GMM(0) and the result of
GMM(10) using two enrollment utterances, respec-
tively.
Table 4 shows the values of the results. Basically,
the performance increased as the duration was longer.
The performances of GMM(10) using two and three
enrollment utterances were almost over 90% for more
than 0.5 [sec] duration, and they were higher than that
of i-vector using three enrollment utterances even if
GMM(10) used two enrollment utterances.
Figure 6 and Tab. 4 also show that the aug-
mentation was effective for most of evaluation key-
words. The performance of the proposed method im-
proved in comparison with the i-vector method. Fur-
thermore, the augmentation method increased perfor-
mance. The results show that our proposed method
was effective for speaker identification using short
keywords.
8 CONCLUSION
This paper proposed a speaker identification method
for even a very short duration of keywords recog-
nized by a NN-based detector. Because the feature
of speaker identification is keyword independent, the
proposed method can be used for various applica-
tions using flexible keywords. Moreover, computa-
tion cost for speaker identification is very small be-
cause the feature is derived from the NN of the de-
tector without any additional NNs. The identifica-
tion rate when using a conventional i-vector method
was 71.22%. In contrast, the performance of the pro-
posed method was 89.29% while maintaining low-
resource-cost computation. Performance of the pro-
posed method was clearly better than that of the con-
ventional i-vector method for speaker identification
using short keywords and few enrollment data values
with a low-resource computation cost.
REFERENCES
Barker, J., Marxer, R., Vincent, E., and Watanabe, S.(2015).
The third ‘chime’speech separation and recognition
challenge: Dataset, task and baselines. In 2015 IEEE
Workshop on Automatic Speech Recognition and Un-
derstanding (ASRU), pages 504–511. IEEE.
Chen, G., Parada, C., and Heigold, G. (2014). Small-
footprint keyword spotting using deep neural net-
works. In 2014 IEEE International Conference on
Acoustics, Speech and Signal Processing, ICASSP
2014, pages 4087–4091. IEEE.
Chen, N., Qian, Y., and Yu, K. (2015a). Multi-task learn-
ing for text-dependent speaker verification. In Pro-
ceedings of the 16th Annual Conference of the Inter-
national Speech Communication Association, pages
185–189. International Speech Communication Asso-
ciation (ISCA).
Chen, Y.-h., Lopez-Moreno, I., Sainath, T. N., Visontai,
M., Alvarez, R., and Parada, C. (2015b). Locally-
connected and convolutional neural networks for
small footprint speaker recognition. In Proceed-
ings of the 16th Annual Conference of the Inter-
national Speech Communication Association, pages
1136–1140. International Speech Communication As-
sociation (ISCA).
Dehak, N., Kenny, P. J., Dehak, R., Dumouchel, P., and
Ouellet, P. (2011). Front-end factor analysis for
speaker verification. IEEE Transactions on Audio,
Speech, and Language Processing, 19(4):788–798.
Dutta, T. (2007). Text dependent speaker identification
based on spectrograms. Proceedings of Image and vi-
sion computing, pages 238–243.
Gal, Y. (2016). Uncertainty in deep learning. PhD thesis,
University of Cambridge.
Hebert, M. and Heck, L. (2003). Phonetic class-based
speaker verification. In Eurospeech 2003 - Interspeech
2003. ISCA.
Junkawitsch, J., Neubauer, L., Hoge, H., and Ruske, G.
(1996). A new keyword spotting algorithm with
pre-calculated optimal thresholds. In Proceeding of
Fourth International Conference on Spoken Language
Processing. ICSLP’96, volume 4, pages 2067–2070.
IEEE.
Kanagasundaram, A., Vogt, R., Dean, D. B., Sridharan, S.,
and Mason, M. W. (2011). I-vector based speaker
recognition on short utterances. In Proceedings of the
12th Annual Conference of the International Speech
Communication Association, pages 2341–2344. Inter-
national Speech Communication Association (ISCA).
Kurematsu, A., Takeda, K., Sagisaka, Y., Katagiri, S.,
Kuwabara, H., and Shikano, K. (1990). Atr japanese
speech database as a tool of speech recognition and
synthesis. Speech communication, 9(4):357–363.
Larcher, A., Bonastre, J.-F., Fauve, B. G., Lee, K.-A., L´evy,
C., Li, H., Mason, J. S., and Parfait, J.-Y. (2013).
ALIZE 3.0 - open source toolkit for state-of-the-art
speaker recognition. In Proceedings of the 14th An-
nual Conference of the International Speech Commu-
nication Association, pages 2768–2772.
Larcher, A., Bousquet, P.-M., Lee, K. A., Matrouf, D., Li,
H., and Bonastre, J.-F. (2012). I-vectors in the con-
text of phonetically-constrained short utterances for
speaker verification. In 2012 IEEE International Con-
ference on Acoustics, Speech and Signal Processing,
ICASSP 2012, pages 4773–4776. IEEE.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
306

Larcher, A., Lee, K. A., Ma, B., and Li, H. (2014). Text-
dependent speaker verification: Classifiers, databases
and rsr2015. Speech Communication, 60:56–77.
Mobiny, A., Nguyen, H. V., Moulik, S., Garg, N., and Wu,
C. C. (2019). Dropconnect is effective in modeling
uncertainty of bayesian deep networks. arXiv preprint
arXiv:1906.04569.
Nasu, Y. (2016). Detection apparatus, detection method,
and computer program product. US Patent App.
15/071,669.
Poddar, A., Sahidullah, M., and Saha, G. (2015). Perfor-
mance comparison of speaker recognition systems in
presence of duration variability. In India Conference
(INDICON), 2015 Annual IEEE, pages 1–6. IEEE.
Snyder, D., Garcia-Romero, D., Sell, G., Povey, D., and
Khudanpur, S. (2018). X-vectors: Robust DNN em-
beddings for speaker recognition. In 2018 IEEE Inter-
national Conference on Acoustics, Speech and Signal
Processing, ICASSP 2018, pages 5329–5333.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent neural networks from overfitting. The Jour-
nal of Machine Learning Research, 15(1):1929–1958.
Sturim, D. E., Reynolds, D. A., Dunn, R. B., and
Quatieri, T. F. (2002). Speaker verification using text-
constrained gaussian mixture models. In 2002 IEEE
International Conference on Acoustics, Speech, and
Signal Processing, volume 1, pages I–677. IEEE.
Tsujikawa, M., Nishikawa, T., and Matsui, T. (2017).
I-vector-based speaker identification with extremely
short utterances for both training and testing. In 2017
IEEE 6th Global Conference on Consumer Electron-
ics (GCCE), pages 1–4. IEEE.
Variani, E., Lei, X., McDermott, E., Moreno, I. L., and
Gonzalez-Dominguez, J. (2014). Deep neural net-
works for small footprint text-dependent speaker ver-
ification. In 2014 IEEE International Conference
on Acoustics, Speech and Signal Processing, ICASSP
2014, pages 4052–4056. IEEE.
Wan, L., Zeiler, M., Zhang, S., Le Cun, Y., and Fergus,
R. (2013). Regularization of neural networks using
dropconnect. In Proceedings of the 30th International
Conference on Machine Learning, pages 1058–1066.
Wu, M., Panchapagesan, S., Sun, M., Gu, J., Thomas, R.,
Vitaladevuni, S. N. P., Hoffmeister, B., and Mandal,
A. (2018). Monophone-based background modeling
for two-stage on-device wake word detection. In 2018
IEEE International Conference on Acoustics, Speech
and Signal Processing, ICASSP 2018, pages 5494–
5498. IEEE.
Zhu, L. (2017). Neural network-based small-footprint flex-
ible keyword spotting. Master’s thesis, University of
Karlsruhe Institute of Technology.
Simultaneous Flexible Keyword Detection and Text-dependent Speaker Recognition for Low-resource Devices
307
