
Towards Detecting Simultaneous Fear Emotion and Deception Behavior
in Speech
∗
Safa Chebbi and Sofia Ben Jebara
University of Carthage, SUP’COM, LR11TIC01 COSIM Research Lab, 2083, Ariana, Tunisia
Keywords:
Speech Modality, Fear Emotion, Deception Behavior, Decision-level Fusion, Belief Theory.
Abstract:
In this paper, we propose an approach to detect simultaneous fear emotion and deception behavior from speech
analysis. The proposed methodology is the following. First, two separate classifiers to recognize fear and
deception are conceived based on adequate voice features using K-Nearest Neighbors’ algorithm. Then, a
decision-level fusion based on the belief theory is applied to infer whether the studied emotion and behavior
are detected simultaneously or not as well as their degree of presence. The proposed approach is validated
on fear/non-fear emotional and deception/non-deception databases separately. Results for separate classifiers
reach an accuracy rate in the range of 95% with 24 features for fear recognition and 75% using 8 features for
deception detection.
1 INTRODUCTION
Recently, speech modality has been receiving a grow-
ing interest by the scientific community as it is one of
the most fundamental human communication mean.
Indeed, it is considered as a leaky channel provid-
ing useful information about the speaker’s state (Fair-
banks and Hoaglin, 1941). Therefore, several ap-
plications based on speech analysis have been con-
ceived in the field of human-computer interaction in
different research areas including psychology, cogni-
tive science, artificial intelligence, computer vision,
and many others (Ververidis et al., 2004) (Cowie
and Cornelius, 2003) (Lee et al., 2005) (Pantic and
Rothkrantz, 2003).
In this context, several studies based on speech
analysis have made many achievements in the last
years according mainly to emotion recognition and
deception detection (El Ayadi et al., 2011) (Koolagudi
and Rao, 2012) (Graciarena et al., 2006). Thus
,acoustic properties hidden in speech have been in-
vestigated to identify behaviors and emotions. To do
it, different vocal features have been explored such as
prosodic ones modeling the accent and the intonation
of the voice (Cowie et al., 2001), spectral properties
∗
This work has been carried out as part of a federated
research project entitled: Sensitive Supervision of Sensitive
Multi-sensor Sites, supported by the Research and Studies
Telecommunications Centre (CERT), funded by the Min-
istry of Higher Education and Scientific Research, Tunisia.
(Rong et al., 2009), voice quality features (Scherer,
1986) and perceptual features (Haque et al., 2005).
Different emotions have been studied along with
automatic emotion recognition patterns including
fear, anger, happiness, disgust, surprise, boredom,
sadness. It is mainly useful for man-machine interac-
tion applications where the speaker’s emotions play
an important role such as medical diagnostic tools
(France et al., 2000), tutoring systems (Schuller et al.,
2004), call centers (Ma et al., 2006), etc. Moreover,
deception behavior has been one of the main tasks
addressed based on automatic speech analysis which
can be exceedingly helpful in forensic applications
including mainly law enforcement and national se-
curity agencies (Wang et al., 2004) (Kirchh
¨
ubel and
Howard, 2013) (Bond, 2008). We relate for example
detecting deception in the statements of suspects or
witnesses or evaluating whether or not an individual
is hiding information or providing incomplete infor-
mation.
In this study, we attempt to detect simultaneous
fear emotion and deception behavior in speech. This
system could be especially useful in high stake situa-
tions related to security or delinquency issues. Fear
and deception have been especially targeted since
criminals are likely to be very fearful of being dis-
covered and if they have to speak, they will logically
attempt to deceive security agents or police investiga-
tors.
The adopted approach consists in conceiving two
712
Chebbi, S. and Ben Jebara, S.
Towards Detecting Simultaneous Fear Emotion and Deception Behavior in Speech.
DOI: 10.5220/0008895807120720
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
712-720
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

systems separately for recognizing fear and deception
through speech modality. The voice is analyzed by
extracting a set of 72 pitch-based features. Then, rel-
evant ones, that well discriminate between fear and
non-fear classes as well as deception and truth classes,
are selected. These features are fed to the related
classifier for fear or deception detection based on K-
Nearest Neighbors (KNN) algorithm. Local decisions
related to fear and deception detection are taken and
their outputs, in terms of probabilities are used as in-
puts of the decision level fusion module. Afterward,
speech-based decisions captured from fear and decep-
tion recognition systems are merged to get the final
decision about the degree of simultaneous fear and
deception detection. The main contribution in this re-
search consists in the use of the belief theory in order
to integrate fear emotion and deception behavior to-
gether.
The rest of this paper is organized as follows: in
the next section, the adopted approach is presented
and described. Section III will provide a detailed de-
scription about the proposed decision-level fusion. Fi-
nally, section IV is devoted to present the fear and
deception classification results as well as the fusion
results for simultaneous fear and deception detection.
2 THE PROPOSED APPROACH
FOR SIMULTANEOUS FEAR
AND DECEPTION DETECTION
IN SPEECH
The block diagram, depicted in Fig. 1, illustrates an
overview of the adopted speech phases analysis lead-
ing to simultaneous fear and deception detection. The
proposed approach consists of 5 steps: feature ex-
traction, feature selection, fear and deception classi-
fication, decision level fusion and finally simultane-
ous fear and deception detection. These steps are de-
scribed in details below.
2.1 Feature Extraction
After acquiring speech, acoustic features are first ex-
tracted from the voice. We have been interested
in vocal-folds related features and more precisely in
pitch which represents its opening-closing frequency.
The pitch has been widely investigated in several
studies for emotion recognition as well as deception
behavior detection and has proved its usefulness (Ek-
man et al., 1976). Therefore, a set of 72 pitch-based
features is considered. They are classified into four
groups: 12 usual measures (mean, max, deviation,
...), 28 features related to pitch’s derivative and sec-
ond derivative (as they are linked to vocal folds’ vi-
bration speed and acceleration), 14 features related to
speech voicing and 18 varied others. The whole set of
features, explored in this study, is displayed in Tab. 1
below.
2.2 Feature Selection
After features extraction, relevant feature selection
is a crucial step which should be performed in
order to avoid the curse of dimensionality phe-
nomenon. Highly informative features are selected
based on the Fisher Discriminant Ratio (Theodoridis
and Koutroumbas, 2009). The latter is used to quan-
tify the discriminatory power between fear and non-
fear classes as well as deception and truth classes.
Thus, features are ranked in descending order accord-
ing to their FDR importance. Then, the classification
is manipulated, separately for deception and fear clas-
sifiers, by adding at each iteration one feature from
the ranked list. Finally, the features considered as rel-
evant are the ones providing the best classification re-
sult with the minimum feature number.
2.3 Classification Step
After selecting relevant features which best discrim-
inate between fear and non-fear classes as well as
deception and truth classes independently. They
are fed to the related classifier (fear or deception).
These classifiers infer the emotion/behavior class
most likely expressed (fear or non-fear for fear clas-
sifier and deception or non-deception for deception
classifier) as well as the probability of each identified
status.
In this study, the classification has been manipu-
lated using K-Nearest Neighbors (KNN) algorithm.
KNN has been chosen according to previous study
dealing with a comparison between many classi-
fiers (KNN, decision tree, support vector machine,
and subspace discriminant analysis). The latter has
revealed that KNN gives an adequate tradeoff be-
tween classification performance and features dimen-
sionality. The classification quality was judged us-
ing many complementary criteria (Sokolova and La-
palme, 2009):
- Accuracy: it stands for the overall effectiveness
of a classifier.
- Precision: it represents the class agreement of the
data labels with the positive labels given by the clas-
sifier.
- Recall: it stands for the effectiveness of a classifier
to identify positive labels.
Towards Detecting Simultaneous Fear Emotion and Deception Behavior in Speech
713
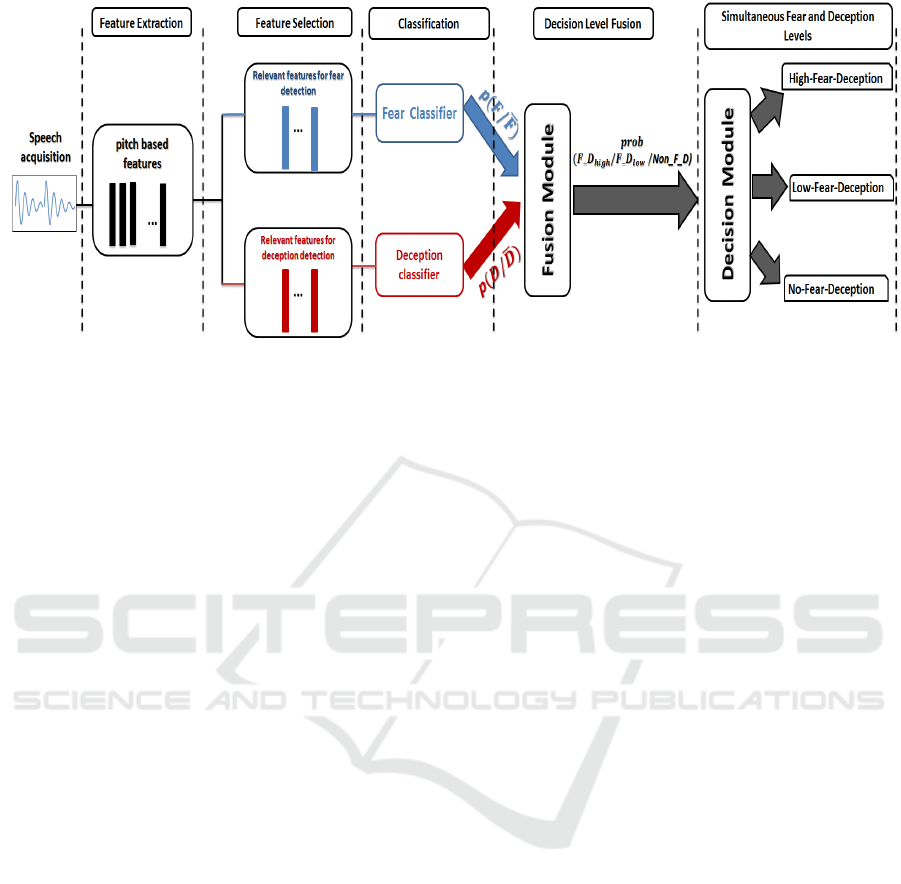
Figure 1: The proposed scheme for simultaneous fear and deception detection through speech analysis.
- F1 Score: it stands for the relation between data’s
positive labels and those given by a classifier. Indeed,
the precision and recall measures are combined pro-
viding a single measurement which is the F1 Score.
2.4 Fear and Deception Decision-level
Fusion
After passing fear and deception probabilities to the
fusion unit, they are combined together to infer a final
decision about the simultaneous fear and deception
detection. We adopted an advanced approach based
on belief theory for decisions merging (Shafer, 1976).
The main advantage of fusion belief theory is, that
it takes into consideration the imprecision and uncer-
tainty of fear and deception classifiers and returns, as
a result, the probabilities of detecting simultaneous
fear and deception. Hence, the belief theory requires,
as inputs, the probabilities of being a fear or no fear
sequence as well as the probabilities of being a de-
ceptive or truthful sequence. It returns as output the
probabilities of three levels of simultaneous fear and
deception detection (high, low and not). The adopted
fusion methodology is described in detail in the next
section.
2.5 Simultaneous Fear and Deception
Detection
Finally, the probabilities of simultaneous fear and de-
ception detection levels are passed to the decision
unit. The level with the maximum probability is the
one retained as final decision. It is then decided
whether there are simultaneous fear and deception or
not as well as their intensity degree (high, low or no
fear-deception).
3 DECISION-LEVEL FUSION
APPROACH
The goal of this section is to present in more detail
the fusion level approach and how to make a decision
about whether fear and deception are detected simul-
taneously. This fusion approach takes as inputs fear
and deception classifiers responses.
3.1 Basic Beliefs Assignment
This level corresponds to quantifying our beliefs us-
ing a credibility function based on prior knowledge
about the reliability of fear and deception classifiers.
In more detail, it consists in the following steps.
i) Modeling fear and deception discernment
frames denoted Ω
f
and Ω
d
respectively. They contain
all possible outputs of their classifiers: fear (F) and
non-fear (
¯
F) are the two possible outputs according
to fear classifier and deception (D) and non-deception
(
¯
D) are those according to deception detector one.
Formally, Ω
f
=
{
F,
¯
F
}
and Ω
d
=
{
D,
¯
D
}
.
ii) Deducing the power sets of the discernment
frames denoted 2
Ω
f
and 2
Ω
d
. They contain all
the possible combinations of the hypotheses. For-
mally: 2
Ω
f
= {
/
0, {F}, {
¯
F}, {F ∪
¯
F}} and 2
Ω
d
=
{
/
0, {D}, {
¯
D}, {D ∪
¯
D}}, where {F} (resp. {
¯
F})
stands for the hypothesis that fear is true (resp. false),
/
0 represents the conflict between fear and non-fear,
and {F ∪
¯
F} which represents the uncertainty area be-
tween fear or non-fear hypothesis. The same principle
of definitions are available for 2
Ω
d
.
iii) Based on the reliability of fear and deception
classifiers, a mass is assigned to each subset of the
power sets 2
Ω
f
and 2
Ω
d
, reflecting their beliefs. These
masses take values in the interval [0,1]. That is to
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
714
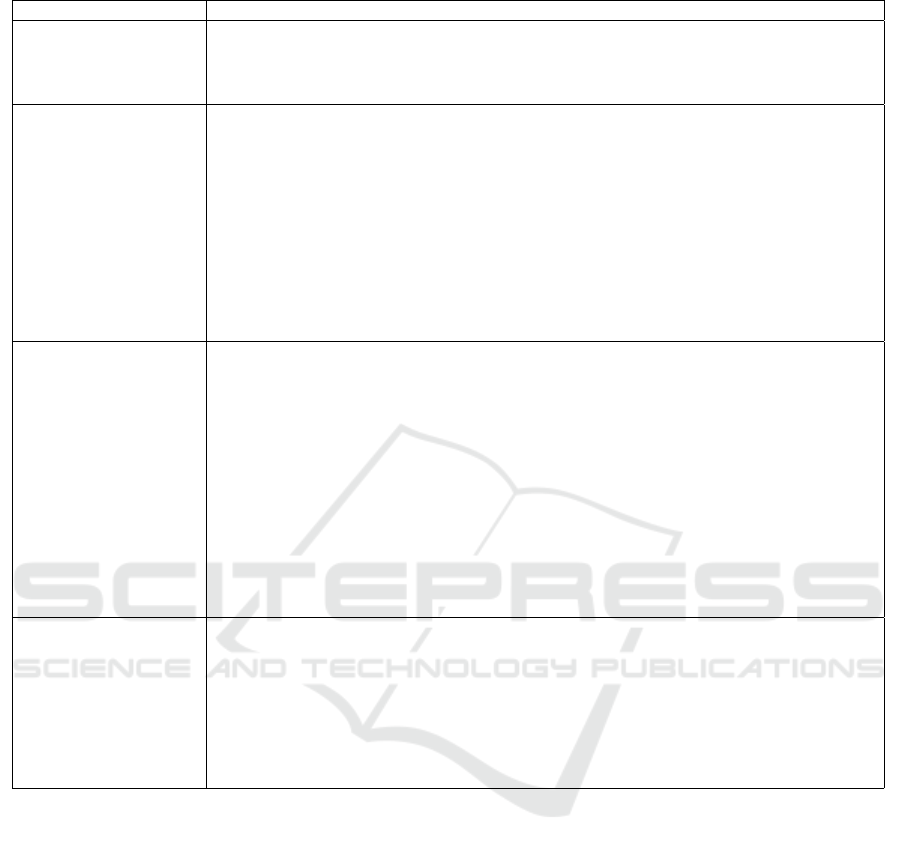
Table 1: Pitch-based features.
Family Features
Usual measures
Mean, Median, Variance, Normalized standard deviation, Max, Min, variance of the voiced
regions means, max of the voiced regions means, min of the voiced regions means,
mean of voiced regions variances, mean of voiced regions minimums,
mean of voiced regions maximums
Speech voicing
Number of voiced frames / number of frames total, Number of unvoiced frames / total
number of frames, Number of voiced frames / Number of unvoiced frames, Number of
voiced regions / Number of unvoiced regions, Number of voiced (unvoiced) regions /
Number of regions total, Length of the longest voiced region/number of frames total
ABS(mean of 1st Voiced region - mean of last Voiced region) / pitch mean
ABS(max of 1st Voiced region - max of last Voiced region) / pitch mean
ABS(min of 1st Voiced region - min of last Voiced region) / pitch mean
ABS(median of 1st Voiced region - median of last Voiced region) / pitch mean
ABS(variance of 1st Voiced region - variance of last Voiced region) / pitch mean
ABS(platitude of 1st Voiced region - platitude of last Voiced region) / pitch mean
ABS(vehemence of 1st Voiced region - vehemence of last Voiced region) / pitch mean
Pitch contour derivative
mean of pitch’s derivative, mean of ABS of pitch’s derivative, Variance of pitch’s
derivative, Variance of ABS of pitch’s derivative, Max of pitch’s derivative, Max of
ABS of pitch’s derivative, Min of pitch’s derivative, Min of ABS of pitch’s derivative,
Median of pitch’s derivative, Median of ABS of pitch’s derivative, Position of the max
derivative, Position of the max of the ABS of derivative, Position of the min derivative,
Position of the min of the ABS of derivative, Mean of the second derivative, Mean of ABS
of the second derivative, Variance of the second derivative, Variance of ABS of the
second derivative, Max of the second derivative, Max of ABS of the second derivative,
Min of the second derivative, Min of the ABS of the second derivative,
Median of the second derivative, Median of the ABS of the second derivative,
Max position of the second derivative, Max position of ABS of the second
derivative, Min position of the second derivative, Min position of the
ABS of the second derivative
Others
normalized max position, normalized min position, Pitch of first voiced frame,
Pitch of second voiced frame, Pitch of middle voiced frame, Pitch of before last
voiced frame, Pitch of last voiced frame, Normalized pitch of first voiced frame,
Normalized pitch of second voiced frame, Normalized pitch of middle voiced frame,
Normalized pitch of before last voiced frame, Normalized pitch of last voiced frame,
Platitude = mean / max, Vehemence = mean / min,
Number of peaks / total frames, mean of voiced regions platitudes,
mean of voiced regions vehemences
say, these masses translate the certainty degree and
ignorance of the problem. m
f
and m
d
are fear and
deception belief masses respectively. In our case, m
f
is defined as follows (similarly for m
d
but replacing f
with d):
m
f
(x) =
0 i f x =
/
0
α
f
∗ score
f
i f x = {F}
(1 − score
f
) ∗ α
f
i f x = {
¯
F}
1 − α
f
i f x = {F ∪
¯
F}
,
(1)
where:
- α
f
and α
d
are fear and deception classifiers accu-
racy rates.
- score
f
and score
d
are posterior probabilities of be-
ing fear and deception sequences respectively.
Indeed, a null mass is assigned for
/
0 as a sequence can
be only fear or non-fear. The fear mass (m
f
({F})) is
defined as the product of the fear classifier prior prob-
ability by the probability of having a fear sequence
(score
f
). The non-fear mass is defined as the product
of the fear classifier prior probability by the probabil-
ity of having a non-fear sequence (1 − score
f
). The
fear and non-fear union mass is assigned the proba-
bility of having faulty predictions by the fear classifier
(represented by 1 −(m
f
({F})+m
f
({
¯
F})) = 1 −α
f
).
3.2 Categorization and Decision Level
The second level of fusion belief theory corresponds
to decision making with 3 levels of detecting fear and
deception simultaneously: high-fear-deception, low-
fear-deception, no-fear-deception. It is constructed as
follows:
i) Combining fear and deception discernment
frames using cartesian product between Ω
f
and Ω
d
.
Towards Detecting Simultaneous Fear Emotion and Deception Behavior in Speech
715
The obtained discernment frame, denoted Ω
f ×d
, is
defined as:
Ω
f ×d
= Ω
f
× Ω
d
=
{
F,
¯
F
}
×
{
D,
¯
D
}
=
{
(F, D), (F,
¯
D), (
¯
F, D), (
¯
F,
¯
D)
}
. Hence, four couples
of emotion/ behavior are obtained.
ii) Transiting from emotion/behavior couples
to simultaneous fear and deception detection
problem has been carried by creating the set
Ω
FD
=
¯
FD, FD
low
, FD
high
.
¯
FD stands for not
detecting deception and fear simultaneously, it cor-
responds to the subset
{
(
¯
F,
¯
D)
}
, where neither fear
nor deception is detected. FD
low
is defined as low
level of simultaneous fear and deception detection.
It contains two subsets FD
low
=
{
(
¯
F, D), (F,
¯
D)
}
,
which correspond to the identification of only
one emotion/behavior. FD
high
is defined as high
level of simultaneous fear and deception detection
(FD
high
=
{
(F, D)
}
) since both fear and deception
are detected.
iii) The last step of fusion belief theory consists
in decision making. In our study, the pignistic
probability, noted BetP, has been used as the decisive
criterion [12]. This latter consists in equiprobably
distributing the beliefs of the hypotheses. Indeed, the
pignistic probability of each hypothesis from Ω
f
is
calculated using the following formula:
BetP
m
f
=
(
BetP(F) = m
f
({F}) +
m
f
({F∪
¯
F})
2
BetP(
¯
F) = m
f
({
¯
F}) +
m
f
({F∪
¯
F})
2
.
(2)
The same kinds of formula are available for decep-
tion. The probabilities of the three levels of detecting
fear and deception simultaneously are calculated as
follows:
prob(
¯
FD) = prob(
¯
F,
¯
D) = prob(
¯
F). prob(
¯
D)
prob(FD
low
) = prob(
¯
F, D) + prob(F,
¯
D)
= prob(
¯
F). prob(D) + prob(F). prob(
¯
D)
prob(FD
high
) = prob(F, D) = prob(F). prob(D)
.
(3)
As a result, the hypothesis with the maximum
probability is the one retained as the final decision.
It is then deduced whether fear and deception are de-
tected simultaneously as well as their intensity degree
(high, low, not).
4 EXPERIMENTAL RESULTS
4.1 Corpus
The fear emotion recognition approach is tested over
the combination of three audio emotional databases:
EMO database (Burkhardt et al., 2005), SAVEE
database (Jackson and Haq, 2014) and RAVDESS
database (Livingstone and Russo, 2018). The objec-
tive is to get a large and varied scenario by combin-
ing many languages and emotions. In total, a large
database including 2247 sequences elaborated by 38
actors simulating 8 emotion types (fear, anger, happi-
ness, disgust, surprise, boredom, neutral and sadness)
is obtained. The classes repartition through the corpus
is the following: 14% for fear and 86% for non-fear
class.
The deception behavior recognition has been investi-
gated with a real-life trial deception detection dataset
(P
´
erez-Rosas et al., 2015). It is an audio-visual
database consisting of videos collected from public
court trials. Statements provided by defendants and
witnesses in courtrooms are accumulated and labeled
based on judgment outcomes and police investiga-
tions. It consists of 196 video clips: 53% of them
are deceptive and 47% are truthful ones.
4.2 Fear and Deception Detection
Results
The objective of this subsection is to present the per-
formance of fear emotion and deception classifiers
separately. As mentioned previously, the features are
ranked according to the FDR importance then the
classification is performed by adding one feature from
the ordered list at each iteration.
Fig. 2 (resp. Fig. 3) illustrates the classification
criteria evolution according to features’ dimensional-
ity. The x-axis gives the number of features used in
classification, from the ranked list by fisher discrimi-
nant ratio (FDR). The classification criteria are illus-
trated in the y-axis.
Based on Fig. 2, one can notice that all criteria,
except recall, present the same evolution: an increas-
ing then decreasing variation oven 30 features vector
size. The evolution of the recall measure presents an
increasing variation and then stabilization. The best
values have been obtained for a feature dimension-
ality between 20 and 30. The intersection between
all measures seems to be the best tradeoff: features
number= 24, accuracy= 95%, precision= 95%, recall=
95%, F1score= 95%, TPR= 95%, TNR = 95%. The
list of most relevant features corresponds to 6 usual
features, 3 features related to the derivative and sec-
ond derivative, 3 ones from the speech voicing family
and 12 others.
Dealing with deception, one can notice from Fig. 3
that criteria evolution fluctuates in the ascending and
descending order and results are worse than those of
fear. It is perhaps due to the database size (196 se-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
716
Features' number
0 10 20 30 40 50 60 70
Classification criteria
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
precision
recall
F1 score
accuracy
Figure 2: Fear classification quality evolution according to dimensionality.
Features' number
0 10 20 30 40 50 60 70
Classification criteria
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
precision
recall
F1 score
accuracy
Figure 3: Deception classification quality evolution acording to dimensionality.
quences for deception versus 2247 for fear). More-
over, the classification criteria are closer for a dimen-
sionality of less than 10. When dealing with a tradeoff
between all classification measures, the feature group
with 8 vector size seems to be the most adequate one
(features number= 8 (3: usual measures, 3: derivative
and second derivative family, 2: others), accuracy=
75%, precision= 77%, recall= 73%, F1score= 75%,
TPR= 73%, TNR = 78%).
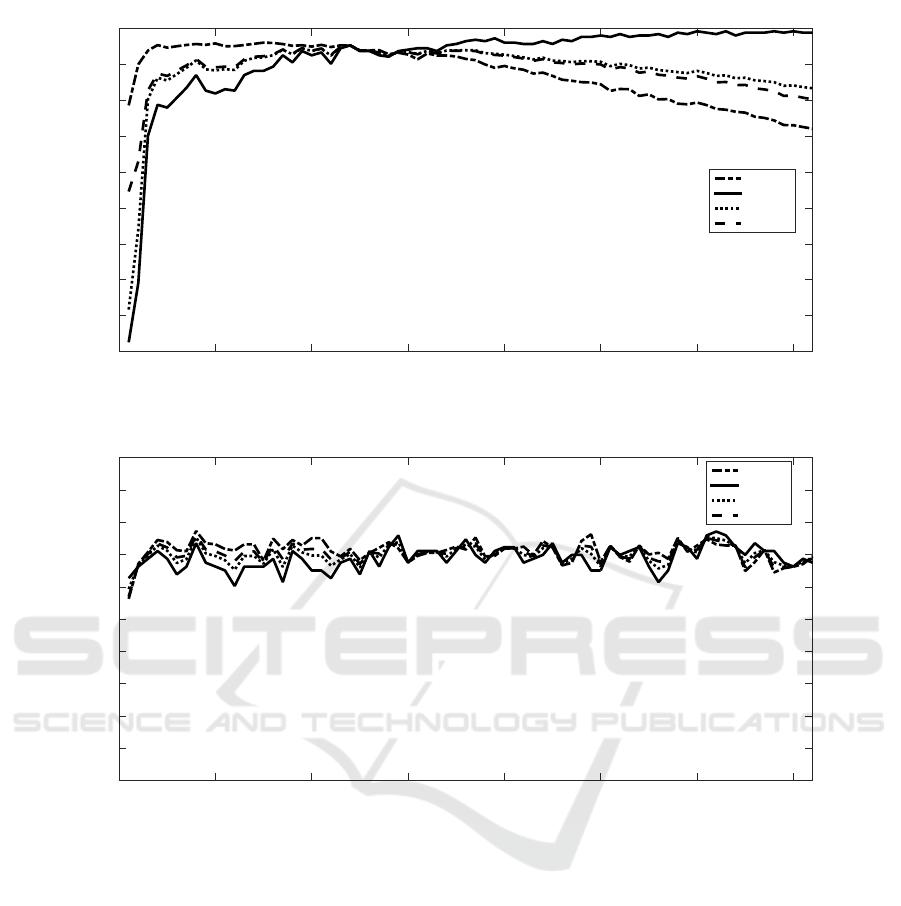
4.3 Fusion Results
As there is no ground truth dealing with simul-
taneous fear and deception, we propose to vali-
date this study using the previous databases. For
the four separate subsets (fear, non-fear, decep-
tion, and truth), we calculate the probabilities of
the 4 possible couples of emotion/behavior. For
each test sequence of the 4 classes, the prob-
abilities of belonging to the fear and deception
classes are calculated separately and then the fu-
sion method is applied. The 4 couples probabilities
(prob(F, D); prob(F,
¯
D); prob(
¯
F, D); prob(
¯
F,
¯
D)) are
obtained and based on them the degree of fear and
deception detection is deduced. Indeed if prob(F, D)
is the highest one, it corresponds to a high level of
simultaneous fear and deception (FD
high
). Else if
prob(
¯
F,
¯
D)) is the highest one, it corresponds to the
absence of simultaneous fear and deception (
¯
FD).
Otherwise, it corresponds to a low level of simultane-
ous fear and deception detection (FD
low
). Boxplots of
the couples probabilities distribution have been drawn
for fear, non-fear, deception and truth test subsets.
Based on Fig. 4 and Fig. 6, one can notice that
Towards Detecting Simultaneous Fear Emotion and Deception Behavior in Speech
717
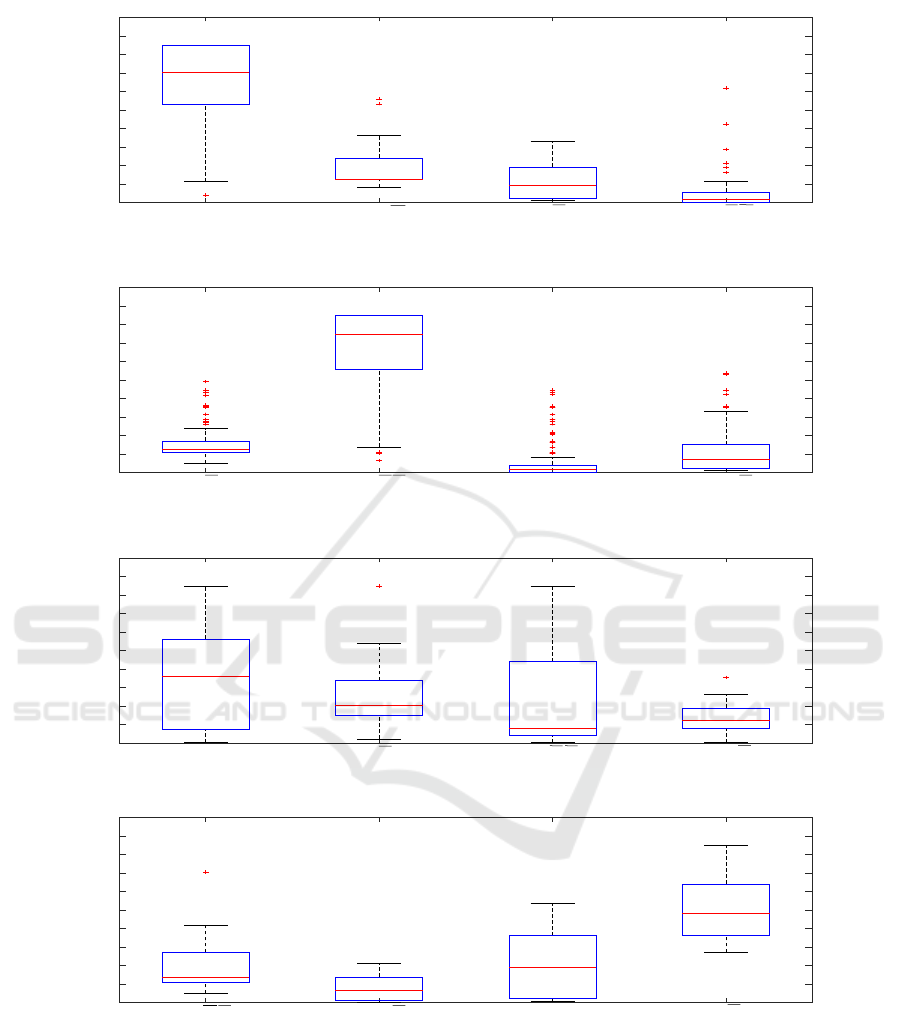
prob(F,D) prob(F,D) prob(F,D) prob(F,D)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 4: Boxplot test fear sequences.
prob(F,D) prob(F,D) prob(F,D) prob(F,D)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 5: Boxplot test non-fear sequences.
prob(F,D) prob(F,D) prob(F,D) prob(F,D)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 6: Boxplot test deception sequences.
prob(F,D) prob(F,D) prob(F,D) prob(F,D)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figure 7: Boxplot test non-deception sequences.
the boxplot of the couple probability prob(F, D) has
a higher range value compared to other couples for
fear sequences as well as deception ones. Thus, it
confirms our hypothesis assuming the correspondance
of fear emotion and deception behavior in speech.
Based on Fig. 5, we can see a clear difference in
the distribution of prob(
¯
F,
¯
D) compared to other cou-
ples probabilities, which is an expected result as we
deal with non-fear sequences. Also, this result con-
firms the absence of deception as the non-fear subset
is conceived around primary emotions (anger, neutral,
disgust, happiness, boredom, and sadness).
According to truth subset and based on Fig. 7,
the distribution of (
¯
F, D) probability presents higher
range values compared to others. Although, it is ex-
pected to have higher probabilities for the couples
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
718
Sequence Number
0 10 20 30 40 50 60 70
Deception-Fear probability
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
High-Deception-Fear
Low-Deception-Fear
No-Deception-Fear
Figure 8: Fear-Deception degrees for fear sequences.
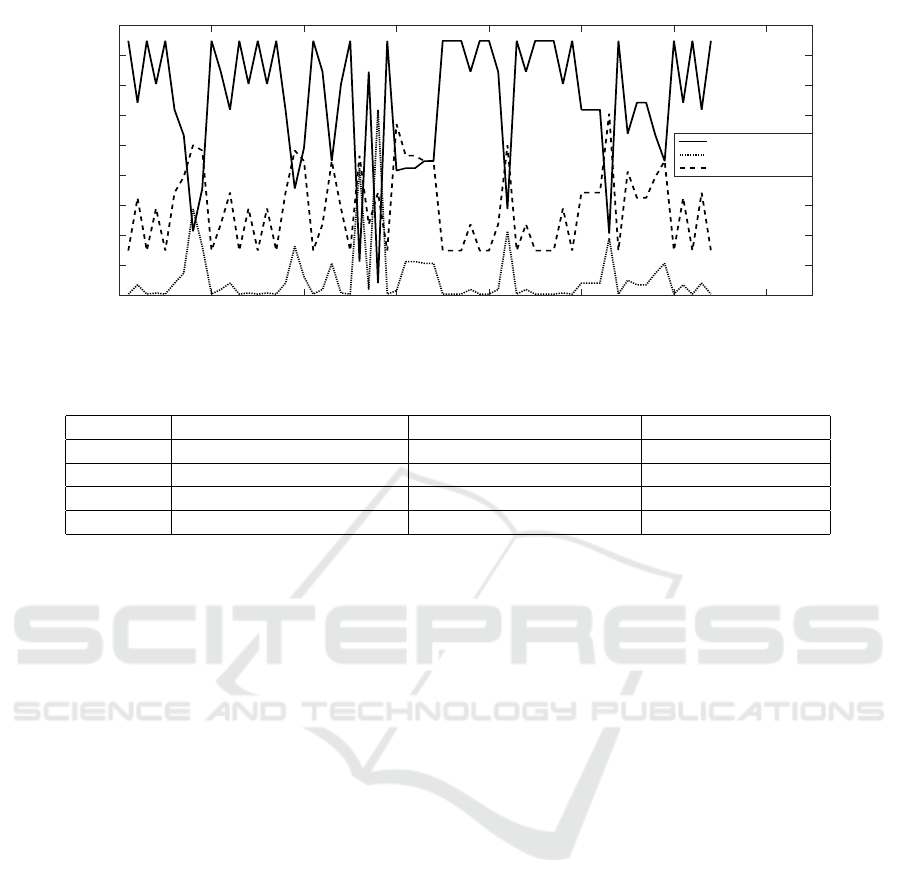
Table 2: Simultaneous deception and fear levels rates.
High-Fear-Deception level Low-Fear-Deception level Non-Fear-Deception
Fear 78% 20% 2%
Non-fear 0% 16% 84%
Deception 43% 33% 24%
Truth 5% 89% 6%
(F,
¯
D) and (
¯
F,
¯
D).
After calculating the probabilities of the couples
of emotion/ behavior, we deal with the probabilities of
detecting simultaneous fear and deception. We hence
calculate the probabilities of the three considered lev-
els: high , low and not (prob(FD
high
), prob(FD
low
)
and prob(
¯
FD)).
Fig. 8 represents the simultaneous Fear-Deception
degrees for the test fear subset. For each sequence,
the probabilities to detect a high, low or non-Fear-
Deception level are illustrated. One can note that the
highest probabilities are obtained for the high Fear-
Deception class then the low Fear-Deception class,
which is an expected result as the highest probabilities
are obtained for one of the couples (Fear,Deception)
or (Fear,non-deception).
Tab. 2 presents the rate of Fear-Deception lev-
els for each test database subset (fear, non-fear, de-
ception and truth). According to fear and decep-
tion test subsets, the majority of sequences have been
judged as a high-Fear-Deception level, some of them
as a low-Fear-Deception level and few cases as no-
Fear-Deception. According to non-fear subset, the
majority of sequences have been judged as No-Fear-
Deception. For truthful ones, the majority of them
have been judged as a low-Fear-Deception level.
5 CONCLUSIONS
The goal of this study was to detect both decep-
tion behavior and fear emotion in speech. The pro-
posed approach operates by fusing decisions from
fear and deception classifiers based on the belief the-
ory. The performance of separate classifiers reaches
95% and 75% as an accuracy rate for fear and decep-
tion respectively. Then our approach has been vali-
dated on fear/non-fear emotional and deception/truth
databases. Future work will consider other emotions
and behaviors whose detection may be of high impor-
tance in forensics applications. Other modalities may
as well be interesting to explore such as body gesture
and facial expressions.
REFERENCES
Bond, G. D. (2008). Deception detection expertise. Law
and Human Behavior, 32(4):339–351.
Burkhardt, F., Paeschke, A., Rolfes, M., Sendlmeier, W. F.,
and Weiss, B. (2005). A database of german emotional
speech. In Ninth European Conference on Speech
Communication and Technology.
Cowie, R. and Cornelius, R. R. (2003). Describing the emo-
tional states that are expressed in speech. Speech com-
munication, 40(1-2):5–32.
Cowie, R., Douglas-Cowie, E., Tsapatsoulis, N., Votsis,
G., Kollias, S., Fellenz, W., and Taylor, J. G. (2001).
Towards Detecting Simultaneous Fear Emotion and Deception Behavior in Speech
719

Emotion recognition in human-computer interaction.
IEEE Signal processing magazine, 18(1):32–80.
Ekman, P., Friesen, W. V., and Scherer, K. R. (1976). Body
movement and voice pitch in deceptive interaction.
Semiotica, 16(1):23–28.
El Ayadi, M., Kamel, M. S., and Karray, F. (2011). Sur-
vey on speech emotion recognition: Features, classi-
fication schemes, and databases. Pattern Recognition,
44(3):572–587.
Fairbanks, G. and Hoaglin, L. W. (1941). An experimen-
tal study of the durational characteristics of the voice
during the expression of emotion. Communications
Monographs, 8(1):85–90.
France, D. J., Shiavi, R. G., Silverman, S., Silverman,
M., and Wilkes, M. (2000). Acoustical properties
of speech as indicators of depression and suicidal
risk. IEEE transactions on Biomedical Engineering,
47(7):829–837.
Graciarena, M., Shriberg, E., Stolcke, A., Enos, F.,
Hirschberg, J., and Kajarekar, S. (2006). Combin-
ing prosodic lexical and cepstral systems for deceptive
speech detection. In 2006 IEEE International Confer-
ence on Acoustics Speech and Signal Processing Pro-
ceedings, volume 1, pages I–I. IEEE.
Haque, S., Togneri, R., and Zaknich, A. (2005). A zero-
crossing perceptual model for robust speech recogni-
tion. In Inter-University Postgraduate Electrical En-
gineering Symposium, Curtin University.
Jackson, P. and Haq, S. (2014). Surrey audio-visual ex-
pressed emotion (savee) database. University of Sur-
rey: Guildford, UK.
Kirchh
¨
ubel, C. and Howard, D. M. (2013). Detecting sus-
picious behaviour using speech: Acoustic correlates
of deceptive speech–an exploratory investigation. Ap-
plied ergonomics, 44(5):694–702.
Koolagudi, S. G. and Rao, K. S. (2012). Emotion recogni-
tion from speech: a review. International journal of
speech technology, 15(2):99–117.
Lee, C. M., Narayanan, S. S., et al. (2005). Toward detect-
ing emotions in spoken dialogs. IEEE transactions on
speech and audio processing, 13(2):293–303.
Livingstone, S. R. and Russo, F. A. (2018). The ryerson
audio-visual database of emotional speech and song
(ravdess): A dynamic, multimodal set of facial and
vocal expressions in north american english. PloS one,
13(5):e0196391.
Ma, J., Jin, H., Yang, L. T., and Tsai, J. J.-P. (2006). Ubiqui-
tous Intelligence and Computing: Third International
Conference, UIC 2006, Wuhan, China, September 3-
6, 2006, Proceedings (Lecture Notes in Computer Sci-
ence). Springer-Verlag.
Pantic, M. and Rothkrantz, L. J. (2003). Toward an
affect-sensitive multimodal human-computer interac-
tion. Proceedings of the IEEE, 91(9):1370–1390.
P
´
erez-Rosas, V., Abouelenien, M., Mihalcea, R., and
Burzo, M. (2015). Deception detection using real-
life trial data. In Proceedings of the 2015 ACM on
International Conference on Multimodal Interaction,
pages 59–66. ACM.
Rong, J., Li, G., and Chen, Y.-P. P. (2009). Acoustic
feature selection for automatic emotion recognition
from speech. Information processing & management,
45(3):315–328.
Scherer, K. R. (1986). Vocal affect expression: A review
and a model for future research. Psychological bul-
letin, 99(2):143.
Schuller, B., Rigoll, G., and Lang, M. (2004). Speech
emotion recognition combining acoustic features and
linguistic information in a hybrid support vector
machine-belief network architecture. In 2004 IEEE
International Conference on Acoustics, Speech, and
Signal Processing, volume 1, pages I–577. IEEE.
Shafer, G. (1976). A mathematical theory of evidence, vol-
ume 42. Princeton university press.
Sokolova, M. and Lapalme, G. (2009). A systematic analy-
sis of performance measures for classification tasks.
Information processing & management, 45(4):427–
437.
Theodoridis, S. and Koutroumbas, K. (2009). Pattern recog-
nition. 2003. Elsevier Inc.
Ververidis, D., Kotropoulos, C., and Pitas, I. (2004). Auto-
matic emotional speech classification. In 2004 IEEE
International Conference on Acoustics, Speech, and
Signal Processing, volume 1, pages I–593. IEEE.
Wang, G., Chen, H., and Atabakhsh, H. (2004). Crim-
inal identity deception and deception detection in
law enforcement. Group Decision and Negotiation,
13(2):111–127.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
720
