
Multi-Branch Convolutional Descriptors for Content-based Remote
Sensing Image Retrieval
Raffaele Imbriaco
a
, Tunc Alkanat
a
, Egor Bondarev and Peter H. N. de With
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven 5612AZ, The Netherlands
Keywords:
Content-based Image Retrieval, Remote Sensing, Convolutional Neural Networks, Local Feature Extraction.
Abstract:
Context-based remote sensing image retrieval (CBRSIR) is an important problem in computer vision with
many applications such as military, agriculture, and surveillance. In this study, inspired by recent developments
in person re-identification, we design and fine-tune a multi-branch deep learning architecture that combines
global and local features to obtain rich and discriminative image representations. Additionally, we propose a
new evaluation strategy that fully separates the test and training sets and where new unseen data is used for
querying, thereby emphasizing the generalization capability of retrieval systems. Extensive evaluations show
that our method significantly outperforms the existing approaches by up to 10.7% in mean precision@20
on popular CBRSIR datasets. Regarding the new evaluation strategy, our method attains excellent retrieval
performance, yielding more than 95% precision@20 score on the challenging PatternNet dataset.
1 INTRODUCTION
In recent years, Remote Sensing (RS) imagery has
become increasingly available. RS image collections
now contain a large number of pictures at high resolu-
tions. Manual labeling and/or annotation of images is
a cumbersome and expensive task. Furthermore, cer-
tain labeling or indexing methods are not suited for
user-friendly retrieval (e.g. consider the case of geo-
graphic coordinates as labels). Therefore, new meth-
ods for managing RS image collections need to be
developed. A technique that has achieved significant
success in the RS community is Content-Based Re-
mote Sensing Image Retrieval (CBRSIR) (Manjunath
and Ma, 1996, Bai et al., 2014, Tang et al., 2018). In
CBRSIR, the goal is to generate compact and robust
representations of the visual content of images, to eas-
ily find similarities among them. Such systems can
generally be reduced to two principal phases. First,
compact image representations are generated in the
feature extraction phase. Second, image similarity is
computed based on special metrics, using the descrip-
tors produced in the first phase.
Research has been commonly concentrated on the
feature-extraction process (Zhou et al., 2017, Roy
et al., 2018, Xiong et al., 2019). Different types of
descriptors have been used for CBRSIR, which are
a
These authors contributed equally to this work.
classified according to their semantic level. Exam-
ples of low-level descriptors are SIFT (Lowe et al.,
1999) and Gabor filters (Haralick et al., 1973), which
describe shape, texture, color, etc. Mid-level de-
scriptors are produced by aggregating low-level fea-
tures, using methods like Bag-of-Words (Sivic and
Zisserman, 2003) or Vector of Locally Aggregated
Descriptors (J
´
egou et al., 2010). High-level descrip-
tors encode information related to semantic concepts,
such as “airplane” and “vegetation”. These high-
level semantic descriptors are commonly extracted
from Convolutional Neural Networks (CNNs), which
are trained for tasks such as classification. Several
architectures and techniques are deployed in liter-
ature to improve feature extraction. Among these
are, Deep Metric Learning (Roy et al., 2018, Xiong
et al., 2019) and local feature extraction & aggrega-
tion (Tang et al., 2018, Imbriaco et al., 2019).
In this study, we explore the CBRSIR and present
a twofold contribution. First, inspired by recent de-
velopments in the field of person re-identification, we
design and deploy a part-based feature extractor and
obtain state-of-the-art retrieval results. To the best of
our knowledge, this is the only system to produce a
single global representation, using a part-based model
for CBRSIR without requiring aggregation after ex-
traction. Second, we propose an alternative, more
challenging evaluation protocol to study the general-
ization capabilities of CBRSIR systems. This simu-
242
Imbriaco, R., Alkanat, T., Bondarev, E. and de With, P.
Multi-Branch Convolutional Descriptors for Content-based Remote Sensing Image Retrieval.
DOI: 10.5220/0008895702420249
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
242-249
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lates a more realistic scenario, where not all of the
classes are available for training purposes, and where
images of known classes can be acquired under dif-
ferent conditions or by different sensors.
2 RELATED WORK
In this section, a summary of the related work is pre-
sented, focusing on methods that exploit CNN fea-
tures, metric learning, and local features.
2.1 Global Feature Extraction
As mentioned previously, one of the fundamental pro-
cessing steps of any CBRSIR system is the feature
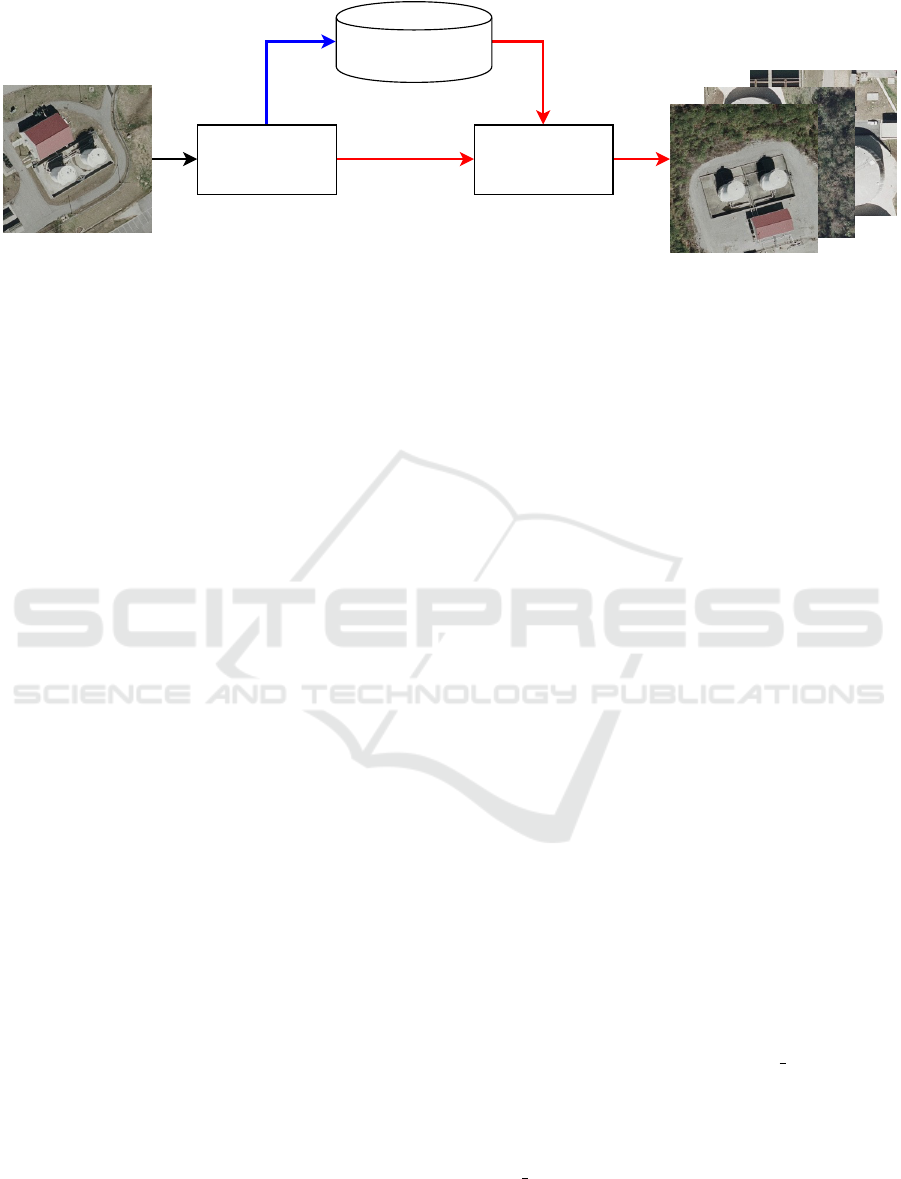
extractor. Figure 1 depicts the basic architecture of an
RSIR system. These are commonly classified accord-
ing to the semantic complexity of the representations
they generate from RS imagery. Early work (Haralick
et al., 1973, Manjunath and Ma, 1996), utilized hand-
crafted textural features to match images with similar
visual content. Richer semantic features are obtained
by combining local descriptors, such as SIFT (Lowe
et al., 1999) with aggregation methods like Bag-of-
Words (BoW) (Sivic and Zisserman, 2003) or Vector
of Locally Aggregated Descriptors (VLAD) (J
´
egou
et al., 2010). However, most recent CBRSIR systems
employ rich semantic features extracted from CNNs.
Penatti et al. demonstrate in (Penatti et al., 2015)
that CNN features are generic enough for RS imagery
classification. In (Zhou et al., 2017), various meth-
ods are proposed for the extraction of descriptive rep-
resentations. These include a Network-in-Network
block (Lin et al., 2013) for dimensionality reduction.
The above-mentioned systems produce a single, high-
dimensional vector per image. These representations
are commonly referred to as global descriptors, as
they encode information about the whole image in-
stead of image regions. The approaches discussed
in the following subsection produce local represen-
tations and descriptors.
2.2 Local Feature Extraction
Alternatives to the global descriptors are presented
in (Tang et al., 2018) and (Imbriaco et al., 2019).
The first work presents an unsupervised framework
for CBRSIR. Images are divided into patches and then
fed through an auto-encoder that reconstructs the in-
puts. Two types of patches (uniform and superpixel)
are extracted per image. The descriptors generated
from each patch are aggregated using Bag-of-Words,
producing a histogram representation for each image.
The second work deploys attentive Deep Local Fea-
tures (Noh et al., 2017) for the extraction of local
descriptors at various scales. These descriptors are
aggregated using VLAD (J
´
egou et al., 2010) and the
network is trained for classification. A disadvantage
of local descriptors is that the direct estimation of
image similarity becomes computationally expensive.
A single image may contain a large number of local
descriptors, making brute-force search inefficient for
large databases. Systems that exploit local descriptors
generally aggregate them into a single global repre-
sentation (BoW, VLAD) for efficient database search.
Furthermore, all methods described above deploy net-
works trained for other tasks, e.g. classification. An
emerging trend in CBRSIR is to train networks using
metric learning for improved retrieval performance.
2.3 Metric Learning for RSIR
Features extracted from CNNs generalize well to
tasks the network was not trained for (Penatti et al.,
2015). However, networks trained using metric-
learning objective functions, such as contrastive
loss (Chopra et al., 2005) or triplet loss (Weinberger
and Saul, 2009), show excellent performance in vari-
ous retrieval tasks, like person re-identification (Her-
mans et al., 2017) and remote sensing image retrieval
(RSIR) (Chaudhuri et al., 2019, Cao et al., 2019).
Cao et al. present a novel method for RSIR us-
ing metric learning and study various dimensionality-
reduction techniques. Their system produces global
descriptors, learned with triplet loss. Dimensionality
reduction and whitening of the trained descriptors is
done using either Principal Component Analysis (Jol-
liffe, 2011), or learned using a fully-connected layer.
Meanwhile, Chauduri et al. construct a Region Adja-
cency Graph, which is fed into a Graph Convolution
Network to produce a global descriptor. This descrip-
tor encodes the relationship between adjacent objects
in the images. Training is done with the contrastive
loss. Metric learning produces descriptors with small
intra-class distances and large inter-class distances in
feature space. These types of descriptors provide ex-
cellent ranking performance, even when dealing with
the visual complexity occurring in RS imagery (scale,
lighting and position variations). Unlike the work dis-
cussed above, our approach enables us to extract lo-
cal image information without requiring neither ad-
ditional post-processing of the convolutional descrip-
tors nor computation of visual dictionaries (as in BoW
and VLAD). Inspired by person re-identification, we
deploy an architecture based on the Multi-Granularity
Network (MGN) (Wang et al., 2018), and train it
for CBRSIR. MGN’s architecture enables the extrac-
Multi-Branch Convolutional Descriptors for Content-based Remote Sensing Image Retrieval
243
Image
Database
Feature
Extraction
Distance
Computation
Query Image Retrieved Images
Figure 1: Diagram of the principal phases in a CBRSIR system. The blue arrow depicts the offline data flow, whereas the red
arrows depict the online data flow.
tion of features from various regions and at differ-
ent granularities (parts of images), thereby produc-
ing a compact and highly descriptive representation.
The combined qualities of this approach enable excel-
lent retrieval performance. Furthermore, we consider
a more generic retrieval case, in which the network
is trained on a dataset and retrieval is performed on
different, unseen datasets. This evaluation procedure
more closely resembles a real-world scenario, where
the training data and retrieval database may have dif-
ferent domains. In conclusion, we aim at an archi-
tecture based on MGN which offers a compact and
highly descriptive representation, while remaining ro-
bust for retrieval with unseen data. A more detailed
description of the architecture and the design param-
eters are given in the following section.
3 METHOD
A. Overview and Feature Extractor: RS imagery is
significantly different from street-level imaging. Im-
ages are acquired from an orthographic view and at
a high altitude, thereby altering the image character-
istics. Moreover, the variety of locations is large, in-
troducing an additional demand on the generalization
ability of the feature extractor. Other sources of ap-
pearance variations can be conditional on weather and
lighting (e.g. illumination and occlusion), or environ-
mental/anthropogenic (e.g. agricultural). The above-
mentioned difficulties inherent to CBRSIR motivates
research towards the development of better feature ex-
traction approaches.
As discussed in Section 2.1, CNN-based feature
extraction approaches are shown to be superior com-
pared to their handcrafted counterparts. Thus, to ex-
ploit the remarkable potential of deep learning, we
adopt CNNs to extract rich features from RS imagery.
However, a single, universal CNN architecture that
performs well on every problem does not exist. Well-
performing architectures are explored for specific ap-
plications.
Recently, in other image retrieval tasks (person
and vehicle re-identification), simultaneous usage
of global and local features has significantly con-
tributed to the overall retrieval performance (Chen
et al., 2019, Zheng et al., 2019). Motivated by this
information, we propose to jointly use global and
local features, to achieve superior performance in
CBRSIR. Inspired by the person re-identification
approach based on MGN (Wang et al., 2018), we
propose the CNN architecture shown in Figure 2.
B. Part-based CNN Architecture: As shown
in Figure 2, our architecture is a five-branch CNN,
where four of the branches extract local features
and one extracts global features. We utilize four
local branches of increasing granularity, to better
adapt to variations in scale and position of the
depicted object in the image content. Many powerful
backbone architectures exist in the literature, such
as ResNet (He et al., 2016), Inception (Szegedy
et al., 2015) and VGG (Simonyan and Zisserman,
2014). In this study, the backbone architecture
is ResNet-50, which is pre-trained on ImageNet.
This decision is guided by ResNet-50’s desirable
computational-cost-to-performance ratio and prior
success in the re-identification literature. Other
backbone architectures can also be used with the
proposed approach.
The shared backbone consists of ResNet-50
blocks up to and including the conv4 1 layer. Each
branch uses the output of the shared backbone to
concurrently extract local and global features. The
features are generated with the remaining blocks of
the ResNet-50 architecture up to and including the
conv5
1 layer. After branching, the ResNet blocks
do not share parameters. During the extraction of lo-
cal branch features, we follow (Wang et al., 2018)
and reduce the last stride of ResNet-50 from 2 to 1,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
244
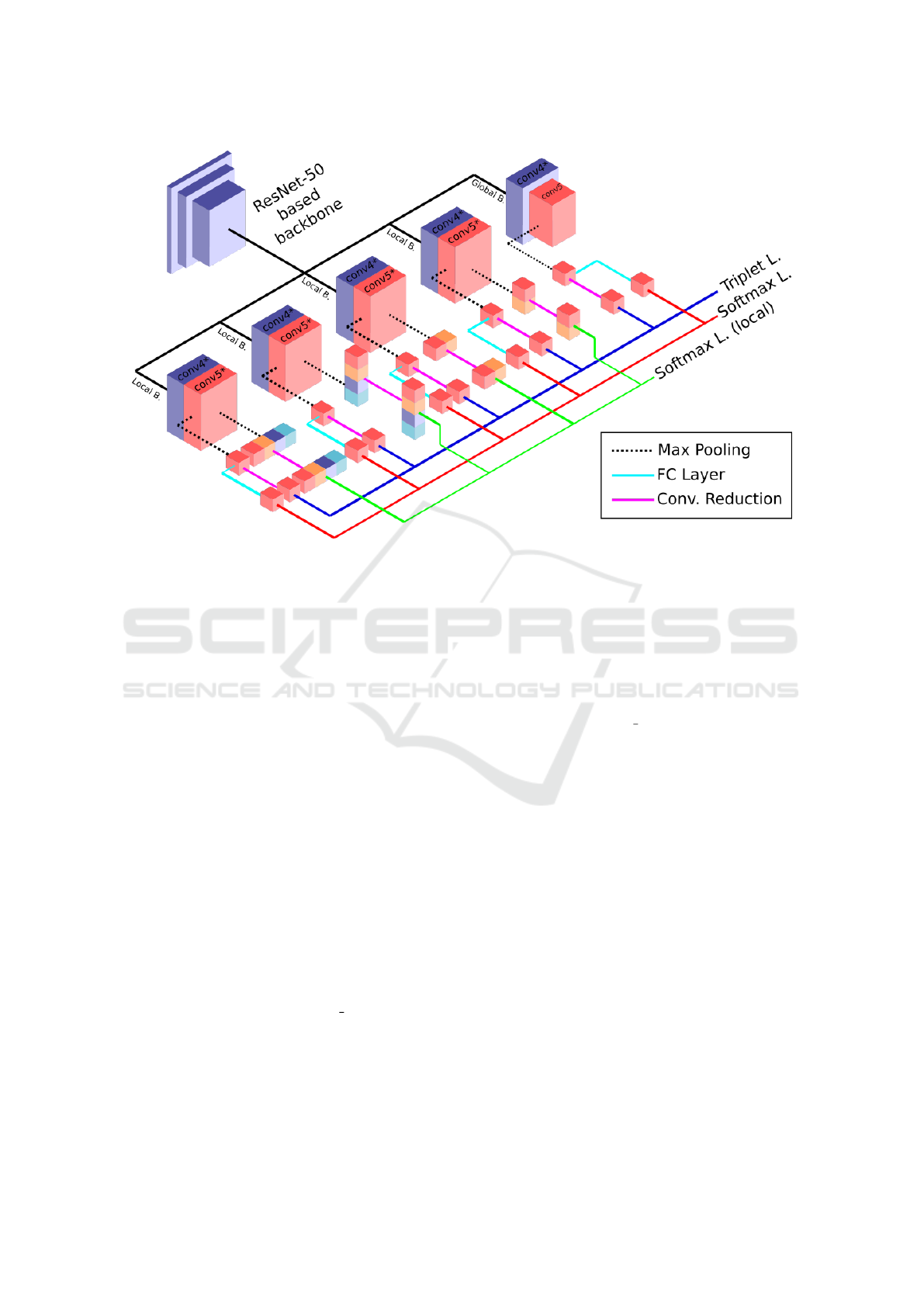
Figure 2: Overview of our proposed model. Our architecture has five branches, one being the global branch and rest are the
local branches. After the shared-weight backbone, the global branch pools the feature tensor along the spatial axes without
partitioning. In contrast, the local branches partition the feature tensor in different configurations prior to pooling. Then, each
local feature is trained using softmax for RS classification problem. Note that, the FC layers after the convolutional reduction
block of each local feature are omitted for clarity (best viewed in color).
which produces better local features. This reduction
enables the local branches to extract richer features
and is found to be helpful in other studies (Luo et al.,
2019, Kalayeh et al., 2018). Then, as depicted in Fig-
ure 2, max-pooling is applied. Each branch has a
different pooling strategy, to boost the feature extrac-
tion performance. The global branch, utilizes max-
pooling over both height and width dimensions, re-
ducing the spatial size to unity. In addition to global
max-pooling, the local branches also partition the fea-
ture tensor into multiple local feature tensors and then
apply individual max-pooling operations. The result-
ing pooled features are then trained with different ap-
proaches. We train for global feature extraction using
the softmax cross-entropy (abbreviated as softmax)
and triplet losses, while we train for local feature ex-
traction using only the softmax loss.
C. Global Features - Softmax: Both the global and
local branches learn global features with the softmax
loss. To this end, global max-pooling is applied to
the feature tensors after the conv5 1 layer of each
branch. Afterwards, the tensor is passed through a
fully-connected (FC) layer, effectively reducing the
size of the pooled feature vectors to N
c
, where N
c
denotes the number of classes in the training dataset.
Lastly, the output of the FC layer is trained with
softmax loss. Our method utilizes softmax loss in
addition to triplet loss on global features, because it
has shown to provide richer features.
D. Local Features - Softmax: The local branches di-
vide the output of conv5 1 into horizontal or vertical
partitions of increasing granularity. Horizontally, the
feature tensor is split into partitions of 1×2 and 1× 4
sub-tensors. The vertical partitions are generated
with the same dimensions. This partitioning strategy
produces high-dimensional representations that take
advantage of the contextual information. Then, the
max-pooling operation is applied individually to
every sub-tensor. Afterwards, the resulting feature
vectors are reduced in size using a convolutional
reduction block. This block consists of 1 × 1 convo-
lution, batch normalization, and ReLU layers, and
reduces the feature size to 256, leading to relatively
compact descriptors. Finally, each reduced feature
is inputted to an FC layer that has N
c
elements and
local features are learned using the softmax loss for
classification.
E. Global Features - Triplet Loss: In addition to
the global softmax loss of each branch, training is
performed with the triplet loss on the reduced max-
pooled feature vectors. The dimensionality-reduction
strategy is identical to that of the local softmax loss
training. The resulting feature vectors are trained us-
Multi-Branch Convolutional Descriptors for Content-based Remote Sensing Image Retrieval
245

ing the triplet loss given as:
L
triplet
=
∑
a, p,n
y
a
=y
p
6=y
n
min(0, m + D
a, p
− D
a,n
), (1)
where a, p, n are anchor, positive and negative sam-
ples, y
i
is the class of sample i, parameter m is the
margin, and D
a, p
and D
a,n
are the distances between
anchor-positive and anchor-negative samples, respec-
tively. Note that we follow (Hermans et al., 2017) and
apply hard-triplet mining to enhance the discrimina-
tion ability of the triplet loss. This hard-triplet min-
ing strategy first picks P classes and then K images
randomly from each class to construct a mini-batch.
During the training, the network weights are only up-
dated for each anchor sample once, using the hardest
positive and negative images within the mini-batch.
At inference time, the final feature vector used for re-
trieval is constructed by concatenating the triplet-loss
trained features. Per branch, feature vectors are ex-
tracted from each partition, prior to their last FC layer
and concatenated. This leads to a fixed-size feature
vector for every image, regardless of the number of
classes in a given training dataset. Then, to math-
ematically represent the distance between any arbi-
trary pair of samples, we calculate a distance metric
between their descriptors. We use the L
2
distance to
compute the similarity between two feature vectors.
4 EXPERIMENTS
4.1 Datasets
To demonstrate the efficiency of our approach,
we evaluate on three widely used public datasets:
UC Merced Land Use (Yang and Newsam, 2010),
NWPU-RESISC45 (Cheng et al., 2017) and Pattern-
Net (Zhou et al., 2018).
UC Merced. Published in 2010, this dataset
includes 2,100 images equally distributed over
21 classes. The image size is 256 × 256 pixels, where
pixel resolution is approximately 30 centimeters.
NWPU-RESISC45. This large-scale dataset in-
cludes 45 classes, each including 700 images. The
image size is 256 × 256 pixels, where the pixel reso-
lution varies between 30 and 0.2 meters. Published
in 2016, this dataset is specifically challenging due to
its large number of classes.
PatternNet. The PatternNet dataset has been pub-
lished in 2017 and forms one of the most recent
additions to the RSIR literature. This dataset includes
38 classes with 800 images. The 256 × 256 pixel
images have been collected from Google Earth and
Google Map API. As is the case for the NWPU-
RESISC45 dataset, the pixel resolution is not fixed
and varies between 4.693 and 0.062 meters.
4.2 Metrics
We adopt two popular metrics to evaluate our ap-
proach. Per experiment, the Mean Precision@k
(mP@k) and the average normalized modified re-
trieval rank (ANMRR) (Manjunath et al., 2001, Ap-
toula, 2013) are computed. In the case of mP@k, we
compute the ratio of correctly retrieved images in the
top k positions. A higher number denotes better per-
formance. The ANMRR evaluates the retrieval per-
formance taking both the number and rank of the re-
trieved results into account. In this case, a smaller
number indicates better performance.
4.3 Splits and Evaluation Protocol
To evaluate the performance of our approach and to
achieve a fair comparison with other methods, we use
two evaluation protocols. In the first evaluation proto-
col, which is also employed in (Tang et al., 2018, Im-
briaco et al., 2019,Cao et al., 2019), we train and eval-
uate on the same dataset. To split the datasets, we
first randomly sample 20% of all images in a class-
balanced manner. Then, we use the remaining part
as the training set. For the evaluation, we consider
each of the smaller subset images as the query and the
rest of the dataset as the gallery. Retrieved matches
of the same class are considered true positives. This
split and evaluation protocol is commonly used for
CBRSIR. However, this evaluation protocol has a sig-
nificant shortcoming. In this strategy, the training
and evaluation sets are not completely disjoint for the
gallery images. In other words, some of the gallery
images for each query are also used for training pur-
poses.
To compensate for the shortcoming of the existing
evaluation protocol and to obtain a better idea about
the generalization capabilities of CBRSIR systems,
we also report results on the transfer learning setting.
In this evaluation approach, we train on a dataset and
evaluate on another. In this way, the training and eval-
uation sets are completely disjoint. Moreover, this
evaluation protocol reveals how successful an algo-
rithm is on discriminating different RS structures in
an image, even if it is not trained to recognize specific
cues. For example, unlike dataset NWPU45, the UC
Merced dataset does not contain the “swimming pool”
class. A system with superior generalization ability is
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
246

Table 1: Comparison of image retrieval performances on the UC Merced, NWPU45 and PatternNet datasets.
UC Merced NWPU45 PatternNet
Method mP@10 mP@20 ANMRR mP@10 mP@20 ANMRR mP@10 mP@20 ANMRR
ResNet50 (Imbriaco et al., 2019) - 0.816 - - 0.798 - - - -
DBOW (Tang et al., 2018) - 0.830 - - 0.821 - - - -
V-DELF (MA) (Imbriaco et al., 2019) - 0.896 - - 0.840 - - - -
SGCN (Chaudhuri et al., 2019) 0.936 - 0.300 - - - 0.971 - 0.210
DML (Cao et al., 2019) 0.976 - 0.023 - - - 0.996 - 0.003
Ours - Global branch only 0.979 0.979 0.019 0.944 0.941 0.074 0.994 0.994 0.012
Ours 0.990 0.990 0.013 0.951 0.947 0.089 0.996 0.995 0.013
expected to be able to discriminate the images belong-
ing to this class as a separate structure, even if it was
not explicitly trained with this class.
4.4 Hyperparameters and Settings
Throughout our experiments, we have used an ini-
tial learning rate of 0.0002, reduced by one-tenth
at epochs 60, 100 and 125. All models have been
trained for a total of 150 epochs using the Adam algo-
rithm (Kingma and Ba, 2014) and the PyTorch frame-
work (Paszke et al., 2017). The values for weight de-
cay and the triplet loss margin were set to 0.0005 and
1.2, respectively. Lastly, hard-triplet mining parame-
ters P and K were set to P = 4 and K = 5 for Pattern-
Net and NWPU45 datasets, where P = 3 and K = 7
were used for UC Merced dataset.
4.5 Results
We present the CBRSIR results organized as follows.
In Table 1, we show the comparative performance
evaluation of our approach against the results of ex-
isting methods. Table 2 depicts the per-class retrieval
performance evaluated on the UC Merced Land Use
dataset. Lastly, we present in Table 3, the retrieval
performance results for transfer learning evaluation
for all dataset combinations. As it can be observed
from Table 1, our method outperforms the previous
state-of-the-art. The multi-branch convolutional de-
scriptors increase the retrieval performance on all
three datasets, except for PatternNet, where our re-
sults are comparable to those of the state of the art.
Moreover, for UC Merced and PatternNet datasets,
our results exceed 99.5%, which may be interpreted
as an indication of a saturated performance.
5 DISCUSSION
Observing Table 2, we conclude that our performance
in various classes is balanced. In UC Merced, the
lowest retrieval results are associated with the “dense
Table 2: Retrieval performances of our system on the UC
Merced dataset for each class and the average.
Class mP@1 mP@5 mP@10 mP@20 ANMRR
agricultural 1.000 1.000 1.000 1.000 0.008
airplane 1.000 1.000 1.000 1.000 0.008
baseball d. 1.000 1.000 1.000 1.000 0.008
beach 1.000 1.000 1.000 1.000 0.008
buildings 1.000 0.950 0.965 0.975 0.017
chaparral 1.000 1.000 1.000 1.000 0.008
d. residential 0.900 0.930 0.925 0.915 0.056
forest 1.000 1.000 1.000 1.000 0.008
freeway 1.000 1.000 1.000 1.000 0.008
golf course 1.000 1.000 1.000 1.000 0.008
harbor 1.000 1.000 1.000 1.000 0.008
intersection 1.000 1.000 1.000 1.000 0.008
m. residential 1.000 1.000 0.990 0.992 0.008
m. homepark 1.000 1.000 1.000 1.000 0.008
overpass 0.950 0.950 0.950 0.950 0.032
parkinglot 0.950 0.950 0.950 0.950 0.032
river 1.000 1.000 1.000 1.000 0.008
runway 1.000 1.000 1.000 1.000 0.008
s. residential 1.000 1.000 1.000 1.000 0.008
storagetanks 1.000 1.000 1.000 1.000 0.008
tenniscourt 1.000 1.000 1.000 1.000 0.008
Average 0.990 0.990 0.990 0.990 0.013
Table 3: Retrieval results on transfer learning setting, ex-
plained in Section 4.3. Here, the model is trained on
the “Training” dataset and evaluated directly on the “Test”
dataset.
Training Test mP@1 mP@5 mP@10 mP@20 ANMRR
UCM PNet 0.941 0.916 0.899 0.880 0.331
UCM NWPU45 0.717 0.658 0.627 0.591 0.620
PNet UCM 0.926 0.851 0.798 0.715 0.483
PNet NWPU45 0.769 0.708 0.670 0.627 0.633
NWPU45 UCM 0.967 0.937 0.911 0.880 0.199
NWPU45 PNet 0.977 0.970 0.964 0.956 0.181
residential” and “overpass” classes. We conjecture
that the lowered performance in those classes occurs
due to the existence of visually similar categories
“medium residential” and “intersection”. In Pattern-
Net, our overall result is only slightly higher than
that of UC Merced. However, considering that Pat-
ternNet is nearly 15 times larger than UC Merced,
this indicates that our method produces sufficiently
discriminative representations even for small datasets
with limited training images. As labeling is a labor-
Multi-Branch Convolutional Descriptors for Content-based Remote Sensing Image Retrieval
247

intensive task, we consider this as an advantageous
property. Perhaps, the most interesting results are
those of the NWPU45-RESISC dataset. This dataset
is comparable in size to PatternNet and it has the high-
est number of classes among all three datasets. As
it is the case for existing approaches, our method ex-
hibits decreased retrieval performance for this dataset.
The classes “railway”, “railway station”, “terrace”
and “palace” show the lowest overall performance,
scoring 0.844, 0.876, 0.868, 0.853 in mP@20, re-
spectively. Among those, the “railway” and “railway
station” classes are visually similar. Our descriptor
is not capable of producing discriminative represen-
tations for classes with such small semantic differ-
ences, resulting in reduced retrieval performance for
both. Overall, we conclude that, according to both
the mean precision and ANMRR metrics, our method
offers class-balanced retrieval performance. As ex-
plained in Section 4.3, we conjecture that the trans-
fer learning results in Table 3 are far more informa-
tive, since they provide better insight into the gen-
eralization abilities of our system. Investigating the
mean precision@20, we conclude that, the best re-
trieval results are obtained when NWPU45 is used as
the source dataset for training. Although the Pattern-
Net and NWPU45 datasets are of similar scale, evalu-
ation on UC Merced reveals that training on NWPU45
offers 16.5% better results than training on Pattern-
Net. Thus, we conclude that thanks to the higher
image diversity of NWPU45, training on this dataset
yields better generalization. Closer inspection of the
results in Table 3 also indicate that applying trans-
fer learning, when the training dataset is UC Merced
yield only moderate results. This reinforces the idea
that the training dataset should be sufficiently rich in
classes and number of images.
6 CONCLUSIONS
In this study, we have presented our deep learning-
based approach to CBRSIR. By taking advantage
of combining deep global and local features, we
have achieved state-of-the-art results on three pub-
licly available and popular datasets. Moreover, our
approach offers near-perfect retrieval performance for
the widely-used UC Merced and PatternNet datasets,
while providing balanced retrieval performance for all
classes of the considered datasets.
As an additional contribution, we have also argued
that the existing evaluation protocol for the CBRSIR
problem has shortcomings and that it is not infor-
mative about the generalization ability of CBRSIR
systems. Thus, we have proposed to utilize transfer
learning evaluation to alleviate the problems of the
existing evaluation approach. Furthermore, we have
presented the results of our method on the transfer
learning evaluation setting. We presume that this new
evaluation protocol will be beneficial for the CBRSIR
literature and will motivate researchers to concentrate
on methods with superior generalization capability.
ACKNOWLEDGEMENTS
The authors kindly appreciate the NVIDIA gift of a
Titan Xp GPU for this research. This work was sup-
ported by the Interreg project PASSAnT and the Eu-
ropean ITEA project PS-CRIMSON.
REFERENCES
Aptoula, E. (2013). Remote sensing image retrieval
with global morphological texture descriptors. IEEE
transactions on geoscience and remote sensing,
52(5):3023–3034.
Bai, Y., Yu, W., Xiao, T., Xu, C., Yang, K., Ma, W.-Y., and
Zhao, T. (2014). Bag-of-words based deep neural net-
work for image retrieval. In Proceedings of the 22nd
ACM international conference on Multimedia, pages
229–232. ACM.
Cao, R., Zhang, Q., Zhu, J., Li, Q., Li, Q., Liu, B., and Qiu,
G. (2019). Enhancing remote sensing image retrieval
using a triplet deep metric learning network. Interna-
tional Journal of Remote Sensing, pages 1–12.
Chaudhuri, U., Banerjee, B., and Bhattacharya, A. (2019).
Siamese graph convolutional network for content
based remote sensing image retrieval. Computer Vi-
sion and Image Understanding, 184:22–30.
Chen, H., Lagadec, B., and Bremond, F. (2019). Partition
and reunion: A two-branch neural network for vehi-
cle re-identification. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 184–192.
Cheng, G., Han, J., and Lu, X. (2017). Remote sensing
image scene classification: Benchmark and state of
the art. Proceedings of the IEEE, 105(10):1865–1883.
Chopra, S., Hadsell, R., LeCun, Y., et al. (2005). Learning a
similarity metric discriminatively, with application to
face verification. In CVPR (1), pages 539–546.
Haralick, R. M., Shanmugam, K., et al. (1973). Textural
features for image classification. IEEE Transactions
on systems, man, and cybernetics, (6):610–621.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hermans, A., Beyer, L., and Leibe, B. (2017). In defense
of the triplet loss for person re-identification. ArXiv,
abs/1703.07737.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
248

Imbriaco, R., Sebastian, C., Bondarev, E., et al. (2019). Ag-
gregated deep local features for remote sensing image
retrieval. Remote Sensing, 11(5):493.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010). Ag-
gregating local descriptors into a compact image rep-
resentation. In CVPR 2010-23rd IEEE Conference on
Computer Vision & Pattern Recognition, pages 3304–
3311. IEEE Computer Society.
Jolliffe, I. (2011). Principal component analysis. Springer.
Kalayeh, M. M., Basaran, E., G
¨
okmen, M., Kamasak,
M. E., and Shah, M. (2018). Human semantic pars-
ing for person re-identification. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1062–1071.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lin, M., Chen, Q., and Yan, S. (2013). Network in network.
arXiv preprint arXiv:1312.4400.
Lowe, D. G. et al. (1999). Object recognition from local
scale-invariant features. In iccv, volume 99, pages
1150–1157.
Luo, H., Gu, Y., Liao, X., Lai, S., and Jiang, W. (2019).
Bag of tricks and a strong baseline for deep person re-
identification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition Work-
shops, pages 0–0.
Manjunath, B. S. and Ma, W.-Y. (1996). Texture features
for browsing and retrieval of image data. IEEE Trans-
actions on pattern analysis and machine intelligence,
18(8):837–842.
Manjunath, B. S., Ohm, J.-R., Vasudevan, V. V., and Ya-
mada, A. (2001). Color and texture descriptors. IEEE
Transactions on circuits and systems for video tech-
nology, 11(6):703–715.
Noh, H., Araujo, A., Sim, J., Weyand, T., and Han, B.
(2017). Large-scale image retrieval with attentive
deep local features. In Proceedings of the IEEE In-
ternational Conference on Computer Vision, pages
3456–3465.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
In NIPS-W.
Penatti, O. A. B., Nogueira, K., and dos Santos, J. A.
(2015). Do deep features generalize from everyday
objects to remote sensing and aerial scenes domains?
In The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops.
Roy, S., Sangineto, E., Demir, B., and Sebe, N. (2018).
Deep metric and hash-code learning for content-based
retrieval of remote sensing images. In IGARSS 2018-
2018 IEEE International Geoscience and Remote
Sensing Symposium, pages 4539–4542. IEEE.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sivic, J. and Zisserman, A. (2003). Video google: A text
retrieval approach to object matching in videos. In
null, page 1470. IEEE.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Tang, X., Zhang, X., Liu, F., and Jiao, L. (2018). Unsuper-
vised deep feature learning for remote sensing image
retrieval. Remote Sensing, 10(8).
Wang, G., Yuan, Y., Chen, X., Li, J., and Zhou, X.
(2018). Learning discriminative features with multi-
ple granularities for person re-identification. CoRR,
abs/1804.01438.
Weinberger, K. Q. and Saul, L. K. (2009). Distance met-
ric learning for large margin nearest neighbor clas-
sification. Journal of Machine Learning Research,
10(Feb):207–244.
Xiong, W., Lv, Y., Cui, Y., Zhang, X., and Gu, X. (2019).
A discriminative feature learning approach for remote
sensing image retrieval. Remote Sensing, 11:281.
Yang, Y. and Newsam, S. (2010). Bag-of-visual-words and
spatial extensions for land-use classification. In Pro-
ceedings of the 18th SIGSPATIAL international con-
ference on advances in geographic information sys-
tems, pages 270–279. ACM.
Zheng, F., Deng, g., Sun, X., Jiang, X., Guo, X., Yu, Z.,
Huang, F., and Ji, R. (2019). Pyramidal person re-
identification via multi-loss dynamic training. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 8514–8522.
Zhou, W., Newsam, S., Li, C., and Shao, Z. (2017). Learn-
ing low dimensional convolutional neural networks
for high-resolution remote sensing image retrieval.
Remote Sensing, 9(5).
Zhou, W., Newsam, S., Li, C., and Shao, Z. (2018). Pattern-
net: A benchmark dataset for performance evaluation
of remote sensing image retrieval. ISPRS journal of
photogrammetry and remote sensing, 145:197–209.
Multi-Branch Convolutional Descriptors for Content-based Remote Sensing Image Retrieval
249
