
Food Recognition: Can Deep Learning or Bag-of-Words Match Humans?
Pedro Furtado
a
CISUC, Universidade de Coimbra, Polo II, Coimbra, Portugal
Keywords:
Deep Learning, Bag-of-Words, Food Recognition.
Abstract:
Automated smartphone-based food recognition is a useful basis for applications targeted at dietary assessment.
Dish recognition is a necessary step in that process. One of the possible approaches to use is deep learning-
based recognition, another one is bag-of-words based classification. Deep learning has increasingly become
the preferred approach to use in either this or other image classification tasks. Additionally, if humans are
better recognizing the dish, the automated approach is useless (it will be less error-prone for the user to identify
the dish instead of capturing the photo). We compare the alternatives of Deep Learning (DL), Bag-of-words
(BoW) and Humans (H). The best deep learner beats humans when on few food categories, but looses if it has
to learn many more food categories, which is expected in real contexts. We describe the approaches, analyze
the results, draw conclusions and design further work to evaluate further and improve the approaches.
1 INTRODUCTION
Food recognition from plates is a well-known prob-
lem in computer vision. It has important applications
in dietary assessment for healthy lifestyles. One im-
portant step for food recognition is dish recognition,
the capacity to detect which dish is presented in front
of the “machine’s eye”. Using a smartphone and an
adequate piece of software, it should be possible to
identify the dish automatically. That capacity would
relieve the user from having to identify the food man-
ually, instead he would only point the smartphone at
the plate in front of him and the dish would be clas-
sified automatically. This vision would be impracti-
cal previously, because machine learning classifiers
were too inaccurate, but the last few years have seen
exciting developments in image classification and ob-
ject recognition based in convolution neural networks
(CNNs). Naturally, these have been considered as an
option for food recognition in the type of context that
we described above. However, CNNs have to reach
comparable or better accuracy than humans in order
to be accepted as a possible substitute to manual spec-
ification of the plate contents by the person herself.
We would not trust an automated food recognizer that
would fare worse than humans. In that case we would
instead ask the human. The relevant question to be an-
swered is whether CNNs are better or worse than the
more traditional machine learning approaches in the
a
https://orcid.org/0000-0001-6054-637X
task of dish recognition, and whether they or the tra-
ditional approaches are worse or better than humans
in that task. To evaluate this, in what concerns more
traditional approaches, we needed to setup one of the
most popular and accurate alternatives, Bag-of-Words
(BoW) (Petraitis et al., 2017). Regarding deep learn-
ing, we needed a setup with state-of-the-art CNN ar-
chitectures, and in what concerns humans, we needed
to evaluate the capacity of a set of subjects to recog-
nize dishes that were previously unknown to them.
In this paper we describe the architectures of the
BoW pipeline and of the CNNs, and we review the
design of the survey we created for testing human
ability in food recognition. Then we describe and
analyze the results we obtained, drawing conclusions
and future work based on those results. The paper is
structured as follows: section 2 reviews related work.
Section 3 discusses methodology, describing how we
have built a set of alternative approaches, including
bag-of-words and deep learning architectures, the hu-
man survey, implementation and training details, plus
experimental setup. Section 4 describes the experi-
mental results and section 5 concludes the paper and
previews future work.
2 RELATED WORK
Dish recognition is a reasonably challenging task for
machine learning approaches. Most difficulties arise
102
Furtado, P.
Food Recognition: Can Deep Learning or Bag-of-Words Match Humans?.
DOI: 10.5220/0008893301020108
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 2: BIOIMAGING, pages 102-108
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

from food being a plastic material, in the sense that
shape, colour, texture and mixtures change signif-
icantly and present huge variability. Examples of
works using “traditional” machine learning classifi-
cation approaches to detect food include (Yang et al.,
2010), where statistics on spatial relationships be-
tween a few ingredients were explored, or (Matsuda
et al., 2012), which detected candidate regions, then
applied bag-of-features (BoF) on SIFT and CSIFT
with spatial pyramid (SPBoF), histogram of oriented
gradient (HoG), and Gabor texture features (56% ac-
curacy with 10 types of foods).
More recent works apply deep learning to achieve
higher accuracies. Deep learning-based image recog-
nition makes use of Deep Convolution Neural Net-
works (CNNs). These systems first raised to promi-
nence in the year of 2012, when Alex Krizhevsky, Ilya
Sutskever and Geoffrey Hinton introduced Alexnet
(Alom, 2018) as a new approach to recognize objects
in images, in the context of the ImageNet Large Scale
Visual Recognition Challenge (ILSVR) (ILSVRC,
2018). Its results beat those of then state-of-the-art
approaches in object recognition, and they became
frequent in any kind of task (e.g. gender recognition
from facial images (Arora and Bhatia, 2018)). Two
of the main features of CNNs is that they add con-
volution layers that process images to extract, filter
and abstract features automatically, and they extend
back-propagation based learning to those convolution
layers to automatically extract information from im-
ages. Posterior CNN architectures perfected Alexnet
to increase accuracy even further in image recognition
tasks. Resnet (He et al., 2016) added residual blocks
to handle vanishing gradients in first layers on back-
propagation runs resulting from increasing depth. In-
ception (Szegedy, 2015) introduced sparse connec-
tions between layers, and it also uses different filter
sizes to capture features with varied degrees of detail.
Authors using CNNs on the food recognition task
obtained much better accuracies than previous ap-
proaches in general. For instance, (Kawano and
Yanai, 2014) achieved 72.26% top 1 accuracy and
92% top 5 accuracy for 100 class food dataset. These
results improve over previous machine-learning non-
deep learning approaches, however it makes sense to
ask whether humans would do better than the 72.3%
accuracy reported in that work. In another work,
(Pouladzadeh and Shirmohammadi, 2017) proposes
a mobile multi-food recognition system using deep
learning as well. Their approach requires the user to
make a bounding circle around the food elements. It
was applied experimentally to 7000 food images of
30 categories of the FooD dataset, showing an aver-
age recall rate of 90.98%, precision rate of 93.05%,
and accuracy of 94.11% compared to 50.8% to 88%
accuracy of other existing food recognition systems.
The accuracy of this approach is impressing, how-
ever there are three details worth noting: (1) it re-
quires the user to draw a bounding circle, therefore
it is not directly comparable with approaches requir-
ing no user interaction besides taking the photo; the
dataset contains many easy to recognize food items
(e.g. bananas); and it has only 30 categories, we will
see that the number of categories has a huge impact
on accuracy.
In (Yanai and Kawano, 2015) the authors exam-
ined the effectiveness of deep convolutional neural
network (DCNN) for food photo recognition task,
seeking the best combination of DCNN-related tech-
niques such as pre-training with the large-scale Im-
ageNet data, fine-tuning and activation features ex-
tracted from the pre-trained DCNN. From the exper-
iments they concluded the fine-tuned DCNN which
was pre-trained with 2000 categories in the Ima-
geNet, including 1000 food-related categories, was
the best method, achieving 78.77% as the top-1 ac-
curacy for UEC-FOOD100 and 67.57% for UEC-
FOOD256 (Foodcam, 2018), both of which were the
best results so far.
When analyzing the results of (Yanai and Kawano,
2015), it becomes clear that the top accuracy is still
far from 100%, (e.g. UEC-FOOD256 was 67.57%).
Our own previous work on this issue involved setting
up the survey and preliminary work on comparison
(Caldeira et al., 2019). We want to compare BoW
with CNN, and both with humans. Is BoW and is
CNN sufficiently better than humans to replace them
in the task of food recognition?
3 METHODOLOGY
Existing food recognition techniques fall under the
categories of classification-based and deep learning-
based approaches. A third category is human-based
identification, whereby a human is asked to recog-
nize each food. This third alternative is necessary for
comparison reasons, since we would not trust an au-
tomated food recognizer that would fare worse than
humans and would instead ask the human. In the
following we discuss how the practical systems were
created, so that we can compare them and reach con-
clusions. These approaches were all setup and ran in
Matlab 2018a.
3.1 Bag-of-Words (BoW)
Bag of Word or Bag of Features (Csurka et al., 2004)
is a machine learning approach for image category
Food Recognition: Can Deep Learning or Bag-of-Words Match Humans?
103
classification by creating a bag of visual words. The
process generates a histogram of visual word occur-
rences that represent an image. These histograms are
used to train an image category classifier. BoW cre-
ates a visual vocabulary, or bag of features, by ex-
tracting feature descriptors from representative im-
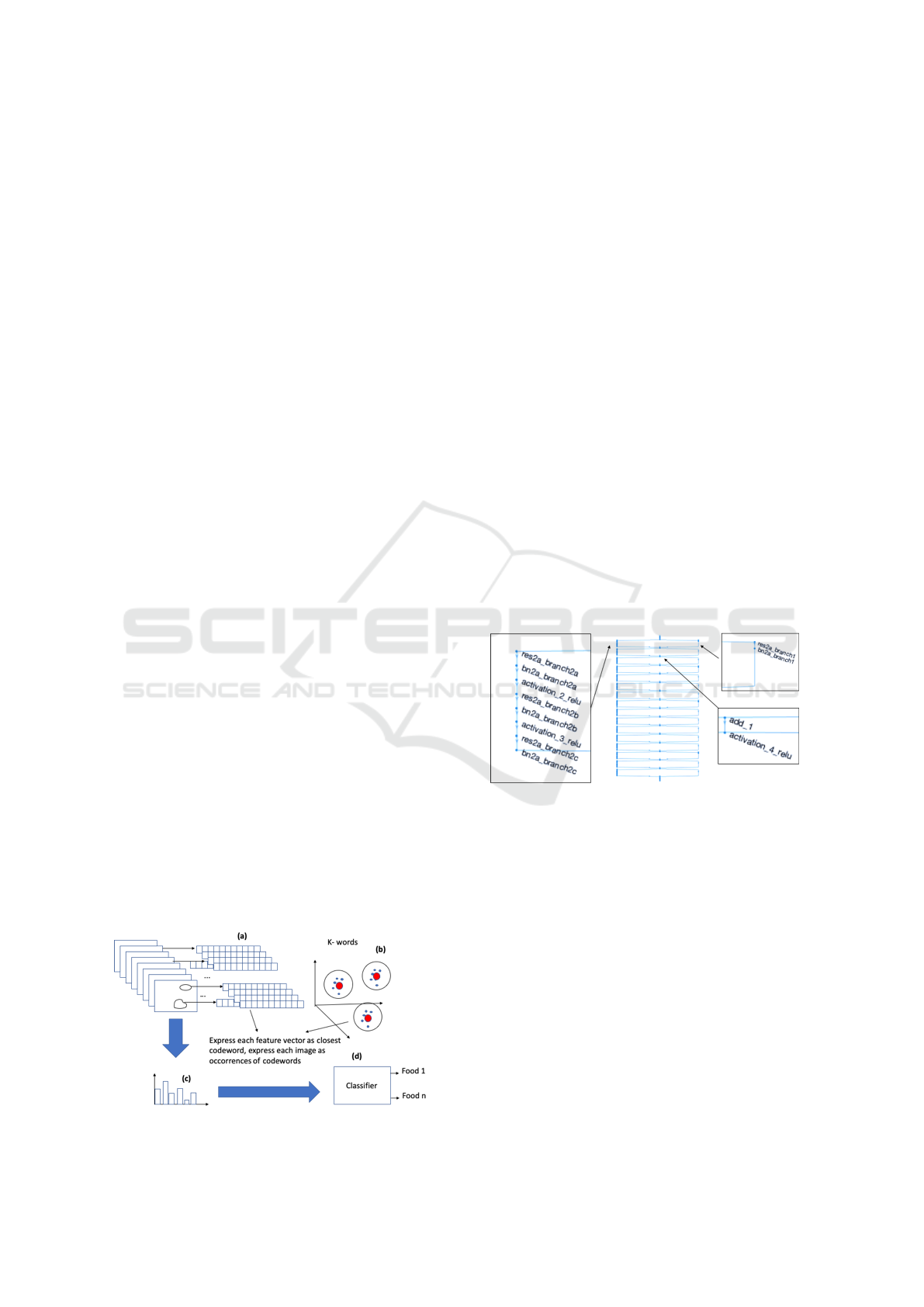
ages (train dataset) of each category. Figure 1 illus-
trates the steps of BoW. The first step (a) involves
feature extraction. In our case we created a custom
feature extractor that would extract texture (GLCM,
binary patterns), colour histograms, SURF and geom-
etry features of regions obtained by thresholding the
images into 6 levels. In BoW, the features extracted
from each image are represented as a vector of fea-
tures (descriptors). Given all vectors of features from
all the training images, the k-means clustering algo-
rithm is applied with k clusters (the vocabulary size)
to automatically obtain k feature vector representative
centroids, or visual words, step (b). The algorithm it-
eratively groups all descriptors into k mutually exclu-
sive clusters. The resulting clusters are compact and
separated by similar characteristics.
The images in the training dataset are then en-
coded into histograms of visual words using the cre-
ated vocabulary (c), representing occurrences of the
code-words. This way the characteristics of any im-
age will be captured as a k-length histogram of occur-
rences of the k codewords. An artificial neural net-
work classifier is then trained to classify images as
one of the categories based on the histograms (d). Af-
ter the BoW is created, given any new image to clas-
sify, the approach detects and extracts features from
the image and constructs the codewords occurrence
histogram for the image. The trained classifier is then
used to classify the image as one of the categories.
Our BoW implementation in Matlab used the
“bagOfFeatures” BoF object. The BoF object al-
lows developers to write custom feature extractors.
We created a customized feature extractor that, be-
sides SURF, would compute texture (GLCM, binary
patterns), colour histograms and geometry features
(Matlab regionprop function) over regions obtained
by Othsu’s thresholding of the images into 6 levels.
Figure 1: Steps of Bag-of-Word.
3.2 Deep Learning Architectures
Our objective setting up deep learning architectures
for the food recognition task was to apply state-of-
the-art standard DCNNs, while at the same time com-
paring their accuracy on the job. We have chosen
GoogLeNet (Szegedy, 2015), Inception-v3 (Szegedy
and Vanhoucke, 2016) and Resnet101 (He et al.,
2016). The Resnet architecture is an important mile-
stone in the history of deep learning, since it demon-
strated that extremely deep networks can be trained
using standard SGD through the use of residual mod-
ules. Before Resnet, deeper networks suffered from
vanishing gradients problem during backpropagation
learning, which severely limited the number of layers
in practice. To improve on this problem, Resnet resid-
ual modules are (local) micro-architectural blocks
that add the identity locally (a layer feeds into the
next layer but also directly into the layers about 2–3
hops away). This enables very deep networks to learn
classifications appropriately, minimizing the vanish-
ing gradients problem. Figure 2 shows the Resnet ar-
chitecture (we show the smaller 50 stages version for
illustration). At each stage in Figure 2 we can see a
set of layers (left), and the adding of the output of the
stage to prior layer (center).
Figure 2: Resnet architecture.
The Inception architecture introduced another mi-
cro architecture pattern, the inception module. The
inception module is a multi level feature extractor by
computing 1x1, 3x3, and 5x5 convolutions within the
same module of the network. The output of these
filters are then stacked along the channel dimension
and before being fed into the next layer in the net-
work. Googlenet was the initial incarnation of this
architecture, improvements were then named Incep-
tionVx. Figure 3 illustrates the graph of InceptionV3
architecture.
The number of layers of the tested Resnet, incep-
tion and googlenet architectures was 101, 48 and 22
respectively. The CNN training setup for each of the
architectures was simple: Imagenet pre-trained net-
works of each were adapted to train and classify ei-
ther all 256 or 16 categories of the food dataset UEC-
BIOIMAGING 2020 - 7th International Conference on Bioimaging
104

Figure 3: Sketch of InceptionV3 architecture.
FOOD256 (Foodcam, 2018) followed by training for
a large number of epochs to ensure convergence (see
experimental setup section). We used transfer learn-
ing. To do that the fully connected layers of the pre-
trained networks were replaced by ones that would
classify 256 or 16 types of food. Softmax activa-
tion outputs probabilities of each class. The train-
ing epochs were configured as 300 (with the option
to stop manually if, upon visual inspection, conver-
gence into final stable accuracy is observed). The
learning rate was set initially to 0.05, validating ev-
ery 4 iterations, and we verified that accuracy would
stabilize/converge in every run.
The trained CNNs adapted their coefficients to
classify food classes, the resulting models were then
used to classify food as one of those types. The
CNN procedure for classifying new images consists
of reading the new image of food to be classified, ex-
tracting features automatically through convolutions
layers that apply learned weights. This procedure
ends with the output which is a set of probabilities that
the food submitted could be of each one of the types
learnt before. For evaluation of accuracy, an indepen-
dent test dataset is used, with images that are submit-
ted to the system for classification, but of which we
already know the correct classes.
3.3 Humans Survey (HVS)
The survey on humans was based in human subjects
that were trained to classify Asian food dishes they
did not know about, both sexes and ages between 18
and 55 years old (respondents were European and
only those not knowing at least 80% of the dishes
were accepted) (Caldeira et al., 2019). The dataset
also included two universal food items such as pizza.
The challenge then is to train the subject to be able
to pick the correct name of food dishes that are pre-
sented to him, and the accuracy is measured as the
percentage of right choices. Next we review some of
the details of the survey.
Human training was designed based on a sequence
of screens shown to teach to recognize the food types
of the dataset. There were 32 screens designed to
teach 16 different categories of food, a number that
was deemed sufficiently small to allow humans to
keep attention and simultaneously not too small to be
too easy. Humans were asked to answer a quiz as the
learning process. The person was expected to figure
out what a certain class of food is like for the screen
that he is evaluating. An example screen is illustrated
in Figure 4.
Figure 4: Example of training screen.
The person needs to decide which of the 8 images
is not a certain food class, and the correct name of
the dish is presented as the title of the image. After
thinking about the answer, the subject clicks to see
the answer. Given the correct answer, the respondent
improves his knowledge about the specific food class
presented in that screen. In Figure 4 all dishes except
one are a specific category identified by the title of the
image. The one marked with an x belongs to another
type of food. Given the universe of 256 types of food
of the UEC-FOOD256 dataset that we used, 16 types
of food were chosen for the experiment with humans,
based on equally spaced percentiles of accuracy of
the DCNN classifying the same data. This way both
the human subjects and the machine were put before
dishes that were “easy”, halfway and difficult to iden-
tify by the best-performing CNN. The classification
session for humans is based on 32 screens (two of
each food class) that the person needs to identify as
one of the types available (16 types of food).
Figure 5 illustrates the classification quiz. In the
figure we can see two example screens with images of
dishes and image identification numbers, and a sheet
of paper where the respondent is expected to write
each identification number in the row of the correct
Food Recognition: Can Deep Learning or Bag-of-Words Match Humans?
105
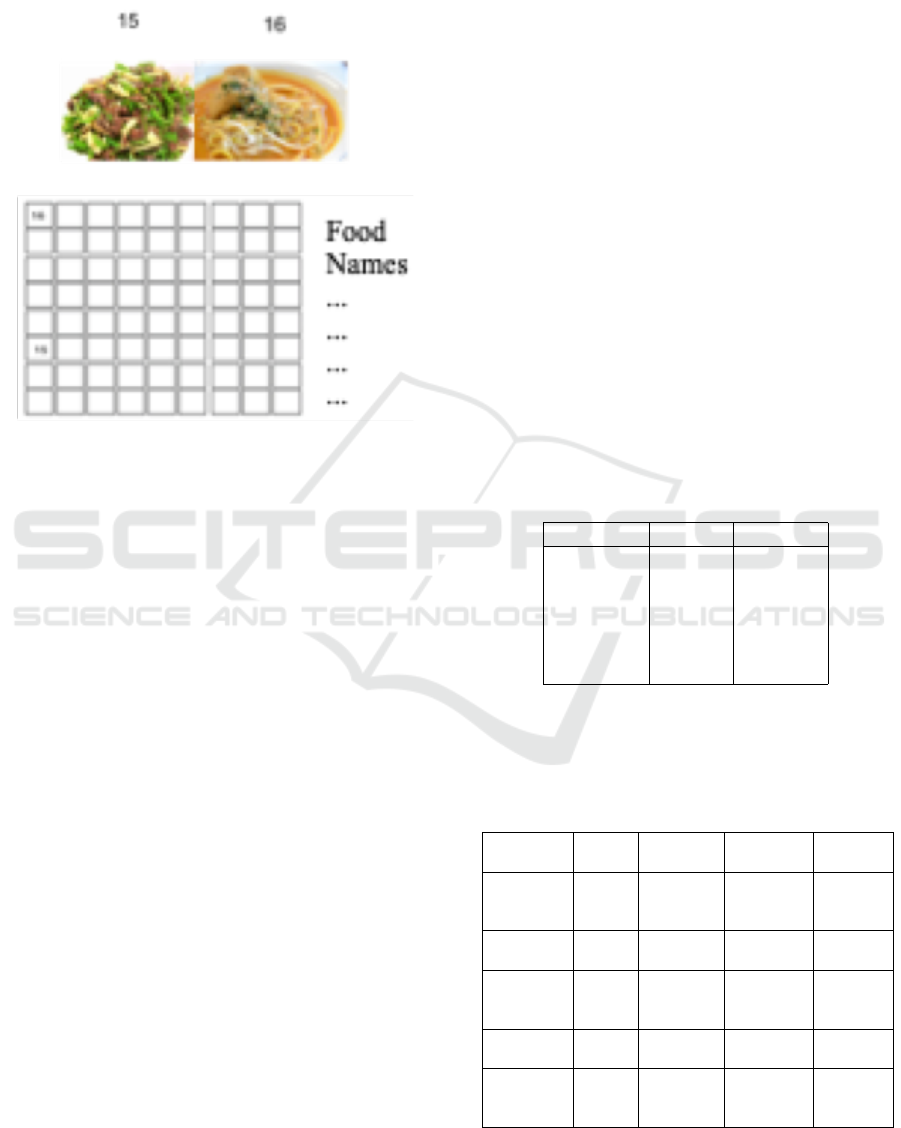
food name. The respondent is shown a screen, fills
the image identification number on the correct row of
the questionnaire and then follows to the next screen.
Figure 5: Example of testing screen.
3.4 Additional setup
The machine used for the experiments was configured
as follows: PC, windows, processor was an Intel i5 at
3.4 GHz, RAM 16 GB, SSD 1TB; NVIDEA GForce
GTX 1070 GPU, having 1920 cores, GDDR5 8 GB,
memo speed ofg 8 Gbps). As an example, the training
time for Resnet101 was more than 5 days (7978 mins)
for 256 food categories and almost 5 hours (277 mins)
for 16 categories.
The dataset used – UEC-FOOD256 (Foodcam,
2018) – is a publicly available food dataset consist-
ing of around 31000 food images organized into 256
classes of food. These are physically organized into
different folders named with the dish name. All food
categories have more than 120 representative samples
(images), although some categories have many more
samples than others.
We designed different setups of the dataset to al-
low comparison with the results of the human survey.
Note that the human survey was based on a restricted
set of 16 categories and only 32 images of each. The
corresponding setups were: Food16 = a restricted ver-
sion of the dataset with the same 16 categories of
food as used in the human survey, but keeping all
images of each of those categories (120 or more of
each category). Training CNNs and BoW with only
these 16 categories allow direct comparison with the
results of the human survey; Food256 = 256 foods,
full dataset. CNNs and BoW were trained with this
full version of the dataset, which allows comparison
among them and also with the results of human sur-
vey. Note that, although the survey trains and tests
only 16 food categories for practical reasons, adult
respondents to the human survey know of thousands
of food items and dishes, therefore it makes sense to
compare with CNNs or BoW having to learn from
many food categories as well;
The labels assigned to the techniques tested and
compared are: Resnet101 (R101), InceptionV3 (Iv3),
Googlenet (G), BoW500 (bag of features with a vo-
cabulary of 500), BoW1000 (bag of features with a
vocabulary of 1000), and Humans (H, the results of
the survey). For the automated techniques, 5-fold
cross-validation was used.
4 RESULTS
In this subsection we show the experimental results,
which are analyzed and discussed in detail later in
the next subsection. Table 1 shows the accuracy each
technique achieved.
Table 1: Comparison of accuracy (technique and data
setup).
Approach Food16 Food256
H 83% -
R101 93% 73%
Iv3 92% 67%
G 89% 56%
BoW500 59% 49%
BoW1000 63% 53%
Tables 2 shows a few per-class precision values, as
classified by humans (H 16), InceptionV3 (Iv3 256)
and Resnet (Res 256).
Table 2: Some food classification scores).
Approach Pizza Fried Sashimi Sweet S
fish pork
H 16 96% 59% 96% 67%
Iv3 256 10% 75% 36% 40%
Res 256 40% 58% 45% 50%
Natto Stir fried Steam chinese
beef dumpling soup
H 16 96% 69% 83% 96%
Iv3 256 90% 92% 33% 67%
Res 256 100% 92% 50% 25%
Laksa Mie Nasi Curry
goreng campur puff
H 16 44% 63% 85% 92%
Iv3 256 92% 80% 91% 69%
Res 256 83% 93% 91% 85%
BIOIMAGING 2020 - 7th International Conference on Bioimaging
106

4.1 Analysis of Comparison Results
The results in Table 1 show that the accuracy of Bag-
of-Words (BoW) was not competitive with that of
either CNNs or humans. Increasing the number of
codewords did improve the results slightly, but per-
formance of BoW was still much lower than CNNs
or humans. Table 1 also shows that Humans achieved
83% accuracy while, for 16 food types, the best CNN
achieved 89% to 93%, depending on the CNN archi-
tecture used. The conclusion is that, given a small
number of food categories to learn, CNNs are very
accurate and can surpass humans.
A more realistic application of CNNs for food
recognition requires learning thousands of food cat-
egories. Table 1 also shows that CNN accuracy with
256 categories of food (Food256) decreases signifi-
cantly, in spite of having the full dataset to train with.
The best performing CNN, which was R101, achieved
73% (down from 93% on 16 categories), Iv3 and G
achieved 67% and 56% respectively. As the num-
ber of food categories to learn increases, accuracy of
all tested CNN architectures decreases significantly.
Practical food recognition systems should be able to
learn thousands of food categories instead.
Table 2 shows that the most difficult categories for
CNN and for humans are different. The conclusion is
that humans and CNNs behave very differently clas-
sifying food types.
4.2 Conclusions from Experiments
Analysis of the results confirm that CNNs are very ac-
curate, and much more accurate than BoW. But the re-
sults also show that when CNNs had to learn 256 food
categories they were less accurate than humans. As a
consequence, in realistic contexts with many food cat-
egories and prior knowledge, humans are expected to
still be more accurate than CNNs. There is however a
need to investigate the comparison to humans in more
detail. Note also that other factors, such as illumi-
nation, perspective, occlusion and others, will further
influence automated recognition capacity negatively,
and other human capabilities and contextual informa-
tion may aid humans improving their guesses in real
environments.
5 CONCLUSIONS AND FUTURE
The promise of smartphone-based capturing of the
dish to be eaten for dietary assessment makes it im-
portant to evaluate feasibility. This work analysed
bag-of-words (BoW) and deep learning-based solu-
tions for food recognition (CNNs), comparing them
to humans as well. The approaches were compared
experimentally and we analyzed the results. This al-
lowed us to conclude that CNNs beat BoW signifi-
cantly. But we also concluded that CNNs accuracy
decreases when they have to learn more food cate-
gories. Our current and future work related to this
issue is focused on the need to analyse this issue in
more detail, evaluating how deep learning compares
with humans, the deficiencies, and how to improve
the approaches.
Future work on practical food recognition systems
can ask the user which of top-3 possibilities is the
right one, since the top-3 accuracy should be much
higher, based also on results by other authors. An-
other line of work concerns feeding different kinds
of contextual information to the CNN classifier stage,
both during training and use, to improve automated
classification accuracy.
Finally, it is very important to experiment with dif-
ficulty inducing-factors, such as bad illumination and
shadows, perspective, occlusion and others, which
will further influence recognition capacity negatively.
REFERENCES
Alom, Z. M. (2018). The history began from alexnet: A
comprehensive survey on deep learning approaches.
In in ArXiv Preprint ArXiv:1803.01164,.
Arora, S. and Bhatia, M. (2018). A robust approach for
gender recognition using deep learning. In 2018 9th
International Conference on Computing, Communica-
tion and Networking Technologies (ICCCNT), pages
1–6. IEEE.
Caldeira, M., Martins, P., and Cec
´
ılio, J. (2019). Compar-
ison study on convolution neural networks (cnns) vs
human visual system (hvs). In . BDAS 2019: 111-
125. Beyond Databases, Architectures and Structures.
Paving the Road to Smart Data Processing and Anal-
ysis - 15th International Conference, BDAS 2019,,
pages 978–3. Ustro, Poland,.
Csurka, G., Dance, C., Fan, L., Willamowski, J., and Bray,
C. (2004). Visual categorization with bags of key-
points. In Workshop on statistical learning in com-
puter vision, ECCV, volume 1, pages 1–2. Prague.
Foodcam, U. (2018). Uec food dataset. [URL accessed in
10/2018] [http://foodcam.mobi/dataset256.html].
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 770–778.
ILSVRC (2018). Large scale visual recogni-
tion challenge. [URL Accessed 10/2018]
http://www.imagenet.org/challenges/LSVRC/.
Food Recognition: Can Deep Learning or Bag-of-Words Match Humans?
107

Kawano, Y. and Yanai, K. (2014). Food image recog-
nition with deep convolutional features. In In
Proceedings of the 2014 ACM International Joint
Conference on Pervasive and Ubiquitous Com-
puting: Adjunct Publication (pp. 589593). ACM.
https://doi.org/10.1145/2638728.2641339.
Matsuda, Y., Hoashi, H., and Yanai, K. (2012). Recogni-
tion of multiple food images by detecting candidate
regions. In In Multimedia and Expo (ICME), 2012
IEEE International Conference on, pages 2530–10.
Petraitis, T., Maskeli
¯
unas, R., Dama
ˇ
sevi
ˇ
cius, R., Połap, D.,
Wo
´
zniak, M., and Gabryel, M. (2017). Environment
recognition based on images using bag-of-words. In
Proceedings of the 9th International Joint Conference
on Computational Intelligence - IJCCI,, pages 166–
176. INSTICC, SciTePress.
Pouladzadeh, P. and Shirmohammadi, S. (2017). Mobile
multi-food recognition using deep learning.". In
ACM Transactions on Multimedia Computing, Com-
munications, and Applications (TOMM) 13.3s, page
3610.
Szegedy, C. (2015). Going deeper with convolutions. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition.
Szegedy, C. and Vanhoucke, Vincent Sergey Ioffe, J. S.
Z. W. (2016). Rethinking the inception architecture
for computer vision. In The IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),,
pages 28182826–10.
Yanai, K. and Kawano, Y. (2015). Food image recognition
using deep convolutional network with pre-training
and fine-tuning.". In IEEE International Con-
ference on Multimedia & Expo Workshops (ICMEW).
IEEE,.
Yang, S., Chen, M., Pomerleau, D., and Sukthankar, R.
(2010). Food recognition using statistics of pair-
wise local features. In Computer Vision and Pat-
tern Recognition (CVPR), 2010 IEEE Conference on,
pages 2249–2256. IEEE.
BIOIMAGING 2020 - 7th International Conference on Bioimaging
108
