
Use Case of Quay Crane Container Handling Operations Monitoring
using ICT to Detect Abnormalities in Operator Actions
Sergej Jakovlev
1,2 a
, Tomas Eglynas
1b
, Mindaugas Jusis
1,3 c
, Saulius Gudas
3
, Valdas Jankunas
1d
and Miroslav Voznak
2e
1
Klaipeda University, Bijunu str. 17 – 206, Klaipeda, Lithuania
2
VŠB-Technical University of Ostrava, 17, Listopadu 15, 708 33, Ostrava-Poruba, Czech Republic
3
Vilnius University, Akademijos str. 4, LT-04812 Vilnius, Lithuania
Keywords: Data Acquisition, Communication Technology, Engineering, Systems Design.
Abstract: This paper presents the initial research findings from the Klaipeda port monitoring action related to Blue
economy development initiative in the Baltic Sea. Use case study demonstrates the possibility to address the
problem of information system deployment in harsh industrial environment to gather valuable statistical
knowledge. Custom made monitoring and data transmission units were developed to utilize the best practice
of engineering to solve real problems of Klaipeda Port. Several key operations and parameters were monitored
during the research, including containers spreader movements, physical characteristics of the cables, metal
constructions. Initial results suggested that crane operators’ involvement in the control of the cargo movement
produced incorrect control patterns (joystick movements) that delayed port operations. Each control
movement of the joystick needs to have a direct real-time feedback from the spreader (actual movement of
the cargo). Feedback control functionality will allow adjusting the spreader movement according to the
operator and will decrease the cargo transportation time during constant breaks.
1 INTRODUCTION
Klaipeda Sea Port has distinguished itself in the
Baltic Region due to its rapid increase in cargo flows
and adoption of Blue Economy regulations and
strategies, that require decrease of CO2 and other
harmful gasses in industry surrounding the Sea Port
and related to Port activities (including shipbuilding,
bulk cargo transit, fossil fuel transship, fishing and
production).
Many practioners’ and action methodology
developers in the transport chain did research in this
area. Ranging from communication and control
systems application with deep insights and relevant
reviews, economical calculations and practical use
cases (Tuan et al., 2018; Golovin and Palis, 2019;
Henikl et al., 2012; Sha et al., 2017). Overall,
possibility to adopt new technologies in such closed
a
https://orcid.org/0000-0002-1440-8221
b
https://orcid.org/0000-0002-9973-5896
c
https://orcid.org/0000-0001-8035-3938
d
https://orcid.org/0000-0003-3077-3568
e
https://orcid.org/0000-0001-5135-7980
environments is a rare opportunity. In practice, the
realization of complex control solutions limited by
the cost efficiency in comparison to standardized and
commonly used solutions (Jakovlev et al., 2012;
Andziulis et al., 2012).
Adoption of new ideas is difficult even to
“modern minds” (Eglynas et al., 2013). In practice, it
is difficult to come close to working equipment and
to acquire agreement for their monitoring on-site.
Initial visual analysis suggested developing new ideas
how to lower fluctuations of the containers gripper.
Its movements are random in nature, due to external
impacts, such as wind or physical contact with other
objects. It is difficult to predict such random
deviations in practice (Golovin and Palis, 2019;
Trabke, 2014).
In comparison, European ports such as Rotterdam
or Hanover apply new systems for vibration decrease
Jakovlev, S., Eglynas, T., Jusis, M., Gudas, S., Jankunas, V. and Voznak, M.
Use Case of Quay Crane Container Handling Operations Monitoring using ICT to Detect Abnormalities in Operator Actions.
DOI: 10.5220/0008880700630067
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 63-67
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
63

in the cables during lowering procedures. Dampening
control systems decrease unnecessary strains arising
during accelerated movement of containers by
synchronizing operators’ actions with the total
lowering process engines and control units. Artificial
Intelligence (AI) systems with stochastic algorithms
for efficient learning and fast adoption to unlikely
events used in scenarios with high risks (Tuan et al.,
2012). Control and coordination of operator movement
is a task for unconventional systems, mainly used to
solve competence shortage problems in engineering,
medicine and explorations environments (Jakovlev et
al., 2011; Jakovlev et al., 2013).
Today, most Baltic Sea Region Ports handled
automated systems, but only on the surface. Context
procedures and IT operations automated in most
“brutal” fashion. Equipment is bought, but not relied
upon to solve critical tasks. That is why inclusion of
the quay crane even in modern ports is still
innovation-theoretical. In reality, the crane operator
has to wait for the Automated Guided Vehicle (AGV)
or the AGV has to wait for the operator to finish his
unloading routine, even when the most modern
control systems are used.
Depending on the actual position of the AGV or
the crane, decisions made systematically to slow
down the speed of movement so that the target point
reached at the same time by all involved bodies. This
saves both energy resources and technical resources,
and increases crane and consequently, the entire port
efficiency.
2 DESCRIPTION OF THE
MONITORING EQUIPMENT
In the experimental research DL1 - MK2 data
logger/analyzer was used to acquire and transfer
statistical data. It uses three-axis accelerometer.
Dynamical characteristics examined, including
acceleration, speed and position. GPS antenna used to
increase the accuracy. Movement speed detection
accuracy set to 0.16 km/h due to technological
reasons and data logging accuracy set to 1% due to
irregularities in the electronics.
Figure 1 demonstrates the used equipment. In
addition, horizontal and vertical acceleration sensors
have standard industry set accuracy level of 0.05 m/s
2
with maximum detection acceleration set to 20 m/s
2
.
Higher speeds and accelerations are statistically
unlikely due to technological and structural reasons.
Mounting point was set on the spreader, shown in
Figure 2.
Figure 1: Demonstration of the secured case with DL-1
MK2 Data logger, GPS antenna and additional connector
for output connections.
Figure 2: Demonstration of the Data Acquisition sensory
hardware placement on the crane spreader.
This position chosen as a more reliable and safe
due to constant movements and obstructions,
unnecessary hits in all areas. Battery life was not an
essential part of the equipment. Its full capacity
lifetime was enough to function on a regular basis for
the entire period of experimentation (8 000 mAh).
DL1 – MK2 data logger chosen because it allows
all the data to be referenced to not just time, but also
to a position during 3D movement. This allows the
data to be interpreted in a strict understandable way,
referenced clearly to the actual position and time
stamp. Braking points and gripper usage was
analysed with the built in 3-axis accelerometer
enhanced for high downforce applications. It is
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
64
capable of detecting minute changes with 100Hz
update rate on all attached sensors and accelerometer
channels. It also provides an 8 analogue channels
(with 0-20 V battery voltage) for sensor inputs ready
for additional measurements and 2 CAN channels
with up to 1 M baud rate with 14 CAN filters per
channel (CAN 2.0 compatible). Logger itself has an
IP50 environmental protection, but due to the harsh
working environment, it was decided to add
additional protection via the secured hard plastic
mounting case. Maximum power consumption set to
1.6 W.
3 EXPERIMENTAL
MEASUREMENT RESULTS
Number of container loading and unloading
measurements set to 278, due to port operations strict
rules and cooperation agreements for the
measurement period. Crane operators were warned
that measurements took place during their working
hours to avoid legal problems. During the meeting
with the working crane operators and truck drivers
(who are also AGV operators), discussions were
made to address the importance of these
measurements and to see the vector of improvement.
Some of the crane operators even expressed
appreciation for the research. The following Figures
provide casual measurements from the loading and
unloading procedures.
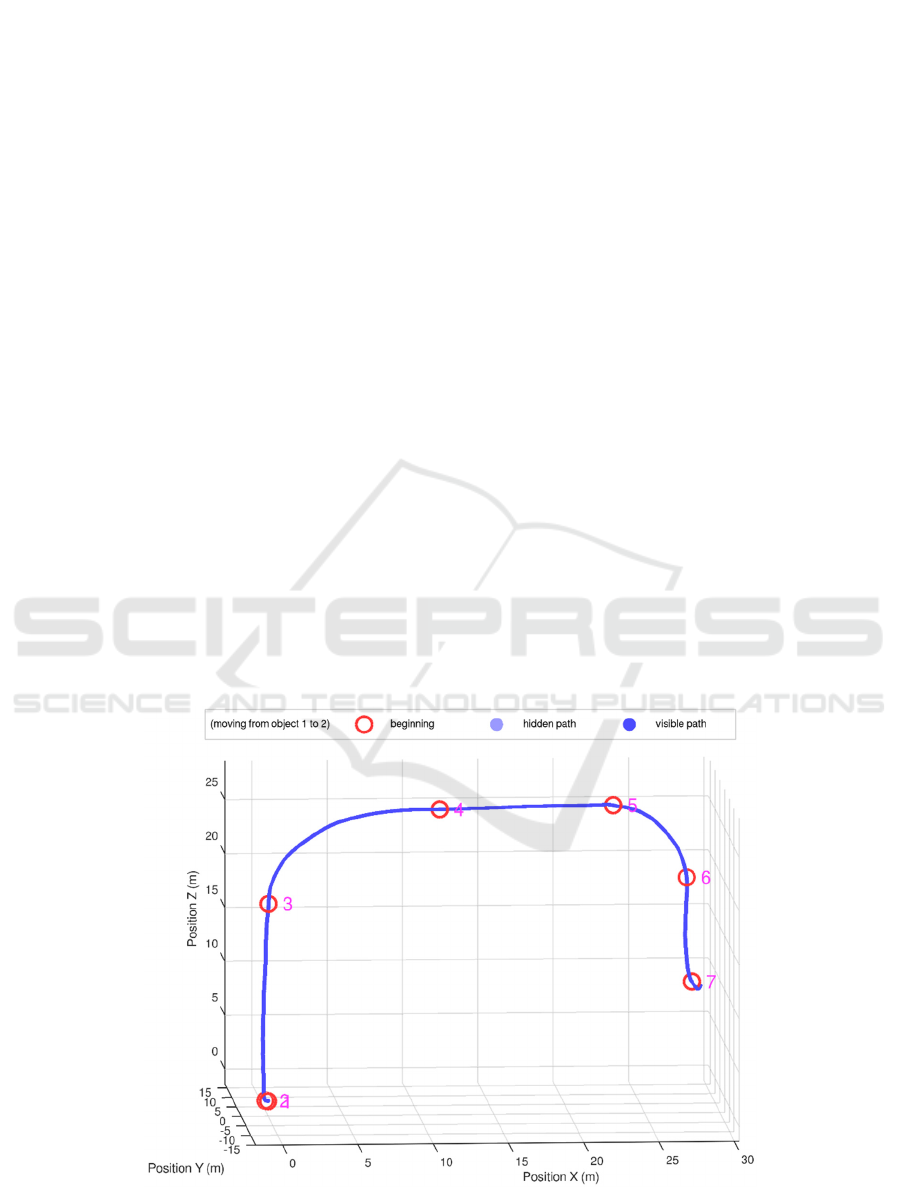
Each measurement had its own deviation and
irregularity, considering the operator “best choice”
scenario set by the operational manual. Figure 3
demonstrates the positional movement of the
container unloading procedure. Each container varied
in mass, therefore, average mass of 20 metric tons
considered for the mean calculations. At this exact
measurement, the mass of the container measured at
19.220 kg.
Figure 3 and the following Figures 4-5
demonstrate 7 stages of operational consideration:
1. Container raising with hooking;
2. Vertical raising of container;
3. Bias raising of container;
4. Horizontal transportation of container;
5. Bias lowering of the container;
6. Vertical lowering of the container;
7. Container placement on the transport means
(truck or AGV).
The following Figure 4 demonstrates the actual
speed values during these 7 stages for the process,
described in Figure 3.
The following Figure 5 demonstrates spreader and
container sway oscillation values. These values are of
high importance, because higher values correlate with
the actual speed of the operation during the 7
th
stage,
by lowering the speed of container positioning on the
transport means or AGV.
Figure 3: Spreader position detection and movement points during the container unloading operation from the ship.
Use Case of Quay Crane Container Handling Operations Monitoring using ICT to Detect Abnormalities in Operator Actions
65
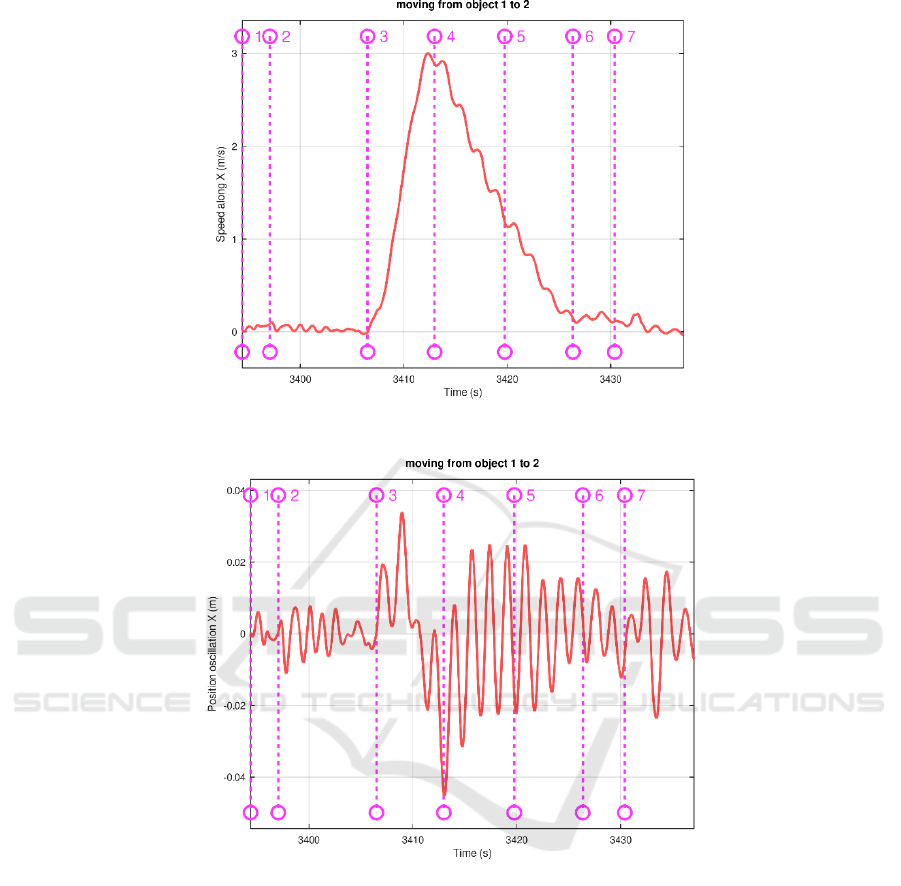
Figure 4: Demonstration of spreader speed actual values during the 7 stages of operation.
Figure 5: Demonstration of spreader and container sway oscillation during the 7 stages of operation.
The overall transportation process is then
prolonged in order to compensate the sway and keep
up with the work standard for safety of cargo and
security of operation. These operations are mostly
synchronized with the on-site AGV operators and
working standards to keep up with the ship unloading
procedure. Yet, due to technological reasons, delays
occur on a daily basis.
4 RESULTS AND DISCUSSION
Initial results suggest that during the operator did not
maintain the same speed during the horizontal
transfer of the container. Operator made sudden
joystick control movements to stop the transportation
process for a short period. Figure 4 demonstrates the
ladder shape of the speed values, which correlates
with the initial suggestion. This is due to operator
mistake, lack of experience and unsynchronized
actions between AGV or truck and the crane. Each
ladder produces additional oscillation, which is kept
up to the final 7
th
stage.
Operational standard regulates the maximum
speed of the spreader movement. Due to these factors,
each container transported with an average of 8.1
seconds delay for the 278 measurements and the
average speed of operation calculated as 40.4
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
66

seconds. This indicates that the working efficiency of
the operation is only 80%. Each crane is capable of
delivering much more container if the operator
movement controlled by AI system with pre-defined
algorithms for optimal movement of containers with
different masses and environmental conditions.
5 CONCLUSIONS
Authors indicate the importance of these researches
in terms of the new Blue Economy regulations for
Ports CO2 decrease (Kavakeb et al., 2013).
Autonomous and electrical AGVs and trucks are now
in operation in several ports of the world, and their
synchronization with the operational standards is still
a real “headache” for engineers and operators on-site.
That is why these problems need to be addressed and
real operational statistical data collected.
The containers handling operational actions of the
Klaipeda port were analysed in detail. Use case study
proved possible to deploy and use information system
in harsh conditions to gather valuable statistical
knowledge.
Custom monitoring and data transmission units
were developed to detect the problem areas of the
Klaipeda Port. Containers spreader movements,
physical characteristics of the cables, metal
constructions and crane operators’ involvement were
monitored.
It was detected that each operator made control
mistakes when handling cargo, which in return
delayed overall port operations.
DECLARATION OF
CONFLICTING INTERESTS
The authors declared no potential conflicts of interest
with respect to the research, authorship, and/or
publication of this article.
ACKNOWLEDGEMENTS
This research is/was funded by the European
Regional Development Fund according to the
supported activity ‘Research Projects Implemented
by World-class Researcher Groups’ under Measure
No. 01.2.2-LMT-K-718-01-0081.
Authors would also like to express deep gratitude
for the insights and help to project members: A.
Andziulis, R. Didziokas, J. Januteniene, E.
Guseinoviene, M. Bogdevicius, D. Cirtautas, A.
Senulis, M. Kurmis, D. Drungilas, Z. Lukosius.
REFERENCES
Andziulis, A., Pltys, R., Jakovlev, S., Adomaitis, D.,
Gerasimov, K., Kurmis, M., Pareigis, V., 2012. Priority
based tag authentication and routing algorithm for
intermodal containers RFID sensor network. Transport.
Vol. 27.
Eglynas, T., Jakovlev, S., Bogdevičius, M., Didžiokas, R.,
Andziulis, A., Lenkauskas, T., 2013. Concept of cargo
security assurance in an intermodal transportation. In:
Marine Navigation and Safety of Sea Transportation:
Maritime Transport and Shipping.
Golovin, I., Palis, S., 2019. Robust control for active
damping of elastic gantry crane vibrations. Mech. Syst.
Signal Process.
Henikl, J., Kemmetmüller, W., Kugi, A., 2012. Modeling
and Simulation of Large-Scale Manipulators with
Hydraulic Actuation. IFAC Proc.
Jakovlev, S., Andziulis, A., Bulbenkiene, V., Didziokas, R.,
Bogdevicius, M., Plestys, R., Zakarevicius, R, 2012.
Cargo container monitoring data reliability evaluation
in WSN nodes. Elektron. ir Elektrotechnika.
Jakovlev, S., Bulbenkiene, V., Andziulis, A., Adomaitis,
D., 2011. E-services providing complex containers
cargo conditions monitoring information system. In:
International Conference on Management of Emergent
Digital EcoSystems, MEDES’11.
Jakovlev, S., Voznak, M., Andziulis, A., Kurmis, M., 2013.
Communication technologies for the improvement of
marine transportation operations. In: IFAC Proceedings
Volumes (IFAC-PapersOnline).
Kavakeb, S., Nguyen, T.T., McGinley, K., Yang, Z.,
Jenkinson, I., Murray, R., 2015. Green vehicle
technology to enhance the performance of a European
port: A simulation model with a cost-benefit approach.
Transp. Res. Part C Emerg. Technol. 60, 169–188.
Sha, M., Zhang, T., Lan, Y., Zhou, X., Qin, T., Yu, D.,
Chen, K., 2017. Scheduling optimization of yard cranes
with minimal energy consumption at container
terminals. Comput. Ind. Eng.
Tuan, L.A., Cuong, H.M., Trieu, P. Van, Nho, L.C., Thuan,
V.D., Anh, L.V., 2018. Adaptive neural network sliding
mode control of shipboard container cranes considering
actuator backlash. Mech. Syst. Signal Process.
Use Case of Quay Crane Container Handling Operations Monitoring using ICT to Detect Abnormalities in Operator Actions
67
