
Impact of First Person Avatar Representation in Assembly
Simulations on Perceived Presence and Acceptance
Jennifer Brade
a
, Alexander Kögel
b
, Christian Fuchs
c
and Philipp Klimant
d
Professorship for Machine Tool Design and Forming Technology, Chemnitz University of Technology,
Reichenhainer Str. 70, Chemnitz, Germany
Keywords: Presence, User Studies, Acceptance, Virtual Reality, Avatars, Immersion.
Abstract: This article reports the impact of three different avatar representations on perceived presence and acceptance
during an assembly task. The conducted experiment focuses not on the perceived virtual body ownership, but
on the limited visibility of the virtual body during a task at a workbench – meaning the view on hands and
forearms. The initial question is, if a detailed avatar, which is time-consuming to develop, is needed during a
virtual assembly task or if the impact on presence and acceptance caused by the kind of avatar visualisation
is negligible. Therefore, three different kinds of avatar representations were used to examine the influence of
the avatar on the perceived presence and acceptance. The results of the experiment show that there are no
significant differences between the three kinds of avatar representations. All three avatars reach high values
for presence and acceptance. Therefore, a partial-body representation is sufficient to obtain a high presence
and acceptance level in scenarios which focus on manual tasks on or above a work bench.
1 INTRODUCTION
The advantages in the area of virtual reality (VR)
extend the field of potential applications, also for the
field of mechanical engineering. Thus, and due to the
benefits of virtual environments – like resource
saving, non-destructive testing of machine failures
and better safety aspects for the user, VR scenarios
become a popular tool for training and education. To
ensure the transferability of the virtually learned skills
to the real tasks, it is necessary to simulate the task as
realistic as possible and to reach a high level of
presence in these environments. Presence is described
as the “sense of being in the virtual environment” and
is seen as a cognitive state that results from
information processing of stimuli in the environment
from various senses (Slater and Wilbur, 1997). The
sense of presence is affected by several factors and
many studies devoted on evaluate the degree of
influence these factors exert on it. Schuemie et al.
(2001) listed the results of several researchers in this
field. Weiss et al. (2006) divided factors, which
a
https://orcid.org/0000-0002-6219-6729
b
https://orcid.org/0000-0002-3358-3316
c
https://orcid.org/0000-0003-2835-0638
d
https://orcid.org/0000-0001-7819-8473
influence the sensations of presence into three
categories: Characteristics of the user, the VR system
and the VR task (see
Figure
1).
Figure 1: Factors that influence the sensation of presence in
the virtual environment by Weiss et al. (2006).
The VR system characteristics also include the
way in which the user is represented within the virtual
environment (Nash et al., 2000). These
representations are called avatars and are the users
embodied interface in VR. Such Avatars convey the
feeling of direct interaction with the virtual
environments and are the direct extension of the user
Brade, J., Kögel, A., Fuchs, C. and Klimant, P.
Impact of First Person Avatar Representation in Assembly Simulations on Perceived Presence and Acceptance.
DOI: 10.5220/0008878700170024
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
17-24
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

in VR (Waltemate et al., 2018). The design of the
artificial body affects the so-called “sense of
embodiment” and Kilteni et al. (2012) defines the
sense of embodiment (SoE) toward a body B as the
sense that emerges when B’s properties are processed
as if they were the properties of one’s own biological
body. Embodiment can be achieved at different
levels, which were described by Kilteni et al. (2012)
and effect the level of presence (Jung and Hughes,
2016; Slater and Steed, 2000; Tanaka et al., 2015). To
reach a strong effect of presence it is necessary to
respect the influence of a virtual body on user’s
perception. Because training and education scenarios
in VR focus on processes and tasks, the aspect of the
sense of embodiment is mostly unconsidered. This
also stems from the fact that the creation of a virtual
avatar leads to more effort during the creation of the
VR scenarios and that the view on the virtual body
during assembly or maintenance tasks is mostly
limited to the hands and the arms of the user.
Nevertheless, to accomplish a high level of presence,
a virtual body should be implemented in training and
education scenarios as well. The question is: how
detailed and anatomically realistic should this body
look and behave in order to reach a high value of
presence while keeping the modelling effort as low as
possible.
This paper presents a study that compared
different avatars in a virtual assembly task to evaluate
the influence of the representation towards perceived
presence and acceptance of the scenarios.
2 RELATED WORK
Multiple studies on the topic of presence have shown
that presence is greatly affected by general
embodiment (Jung and Hughes, 2016; Slater and
Steed, 2000; Tanaka et al., 2015) and general
immersion (Slater, 1999). Moreover, using a self-
avatar in immersive virtual reality environments can
positively influence the perceived sense of presence
and help with perceptual judgements and interaction
tasks in these virtual worlds (Slater et al., 1995).
Even the user’s ability to perform purely
cognitive tasks can be improved by providing tracked
self-avatars, as it has been shown that their existence
in a scene appears to reduce cognitive load of the user
during certain tasks (Steed et al., 2016).
It is noteworthy that such virtual self-avatars have
been shown to have a bigger impact on presence
during tasks resembling the real world – like
locomotion – than while using non-realistic
interaction methods, like flying through the virtual
world (Slater et al., 1995).
The majority of studies regarding presence and
virtual embodiment has been performed outside of the
first person perspective, using virtual mirror scenarios
(Waltemate et al., 2018), mannequins (Petkova and
Ehrsson, 2008) or out-of-body experiences
(Lenggenhager et al., 2007), often to overcome the
problem of poor visibility of the avatar representation
(Waltemate et al., 2018). This stands in contrast to the
findings of subsequent studies, that show that using a
first person perspective is “essential for experiencing
the sense of ownership over the virtual body” (Maselli
and Slater, 2013) and to the idea that the increased
immersion of a head mounted display (HMD)
compared to a CAVE system increases both virtual
embodiment and agency, as well as presence itself
(Waltemate et al., 2018).
There are several top down factors affecting the
conceptual interpretation of the virtual body parts the
users sees and controls (Waltemate et al., 2018). One
of the most important aspects of creating a strong
sense of ownership over the virtual limbs is the
synchrony between visual and proprioceptive
information perceived by the user of the VR system
(Sanchez-Vives et al., 2010). This effect is so strong
that some research showed that colocation alone
could create a basic illusion of embodiment even
without full-body motion tracking (Maselli and
Slater, 2013).
Further research has shown, though, that motion
fidelity plays a vital role in strengthening the
believability of self-avatars, even stronger than visual
fidelity (Lok et al., 2003). This also is reflected in
studies regarding avatars representing other people in
the user’s virtual environment, where even cartoonish
looking animated avatars showed benefits over non
animated avatars consisting of basic shapes (Gerhard
et al., 2001) or that an avatar consisting of only
tracked hands and heads was rated better in terms of
copresence and behavioural interdependence
compared to a full body avatar with predefined
animations (Heidicker et al., 2017). It has been noted
that not being able to represent the user’s movements,
due to miscalibration or other factors, might lead to a
break in perceived presence (Slater and Steed, 2000)
as it has been shown that violating anatomical
constraints – like limbs shown in impossible
postures – breaks the full body ownership illusion
(Ehrsson et al., 2004; Tsakiris and Haggard, 2005).
This has been thought as one of the reasons
commercially available software for current home-
user HMD-Systems usually don’t include a full self-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
18

avatar and only present virtual hands or even just the
objects in the users hands (Steed et al., 2016).
Argelaguet et al. (2016) showed in a study
consisting of hazardous looking virtual objects that
had to be avoided during certain simpler tasks, like
picking and placing objects or placing your virtual
hands in a certain spot, that simplified virtual hands
can show benefits as well. For example, they lead to
faster and more accurate interactions as well to a
greater sense of agency than realistic hands with
realistic arms which itself provided the most sense of
ownership compared to the simpler representations –
at least until a certain degree of familiarisation with
the virtual environment has occurred. Blockage of
vision when using the more realistic self-avatar and
tracking issues where stated as the most probable
reasons for these findings (Argelaguet et al., 2016).
The issue of the uncanny valley effect (Mori et al.,
2012) is also hypothesized as one reason for a finding
by Lugrin et al. (2015a) that virtual body ownership
decreased slightly when comparing higher human
resemblance to robot or cartoon-like avatars.
3 EXPERIMENTAL METHOD
As described in the related work section, previous
work compared the influence of avatar
representations on different factors affecting the
sensation of presence. But the question remains how
much avatar representations are contributing to these
factors, when the VR scenarios used are not focused
primarily on experiencing the virtual avatar alone, but
more on the view participants have during tasks
related to training scenarios in the field of mechanical
engineering. Therefore, we decided to compare three
different avatar representations to answer the research
question, if different avatar representations vary in
the presence and acceptance scores in VR scenarios
focussed on manual tasks at workstation tables
(meaning primarily seeing the hand and parts of the
arms of the virtual avatar).
3.1 Participants
34 participants (22 female and 12 male) with a mean
age of 24.38 (SD=3.61) completed the experiment.
All participants were students or employees of the
university and obtained a financial compensation for
their participation. All participants had normal or
corrected-to-normal vision. 11 participants reported
no prior experience with VR, 13 participants had
experienced VR 1 or 2 times and 10 participants had
contact with VR 3 or more times before. The total
time of the test was 40 minutes while the Participants
spent a total of 18 minutes within the virtual
environment. The order of the representation of the
different avatars was randomized. All participants
participated in the study voluntarily and were allowed
to abort the experiment at any time.
3.2 Virtual Reality Setup and Avatars
The experiment took place in a room measuring
4.10 x 4.35 meters with a tracking space of 16 square
meters approximately. The participants wore an HTC
Vive HMD which also used a “Lighthouse” tracking
system version 1 to track the participant’s position.
To study the influence of the avatar representations,
three different forms of avatars were developed. The
first consists only of two floating human hands,
terminating at the wrist (hereinafter called
“hands_only”). These follow the movements of the
Vive controllers according to their tracking data.
Button inputs are visualized by animations displaying
gripping or pointing motions of the hands.
The other two avatars consist of different full-
body manikins, visible in
Figure 2.
Figure 2: Full-body manikins – on the left the lowpoly
version and on the right the highpoly version.
Both are anatomically correct and rigged to a
human-inspired animation skeleton to allow realistic
movements. They diverge in their visual design: One
shows very flat shading with little detail in textures
(hereinafter called “full_body_lowpoly”) the other is
designed more realistically with highly detailed skin
and cloth fabric (hereinafter called
“full_body_highpoly”). Both male and female
versions of the models were provided.
Beside the aforementioned hand animations, the
full body avatars feature an inverse kinematics system
enabling runtime animation of the whole body based
on the transformations of the tracked VR hardware.
Using the Unity plugin Final IK, targets for the
transformations of the body’s end effectors, meaning
Impact of First Person Avatar Representation in Assembly Simulations on Perceived Presence and Acceptance
19

hands, feet and the head, can be set forcing
appropriate movements of the untracked body parts.
Head tracking was established by accessing the
transformation of the HMD itself. Likewise, the
hands were tracked using the Vive controllers and the
feet by standalone Vive trackers fixed to the user’s
actual feet by Velcro straps. All different local
coordinate systems of the hardware were aligned with
the user through different offsets in both position and
rotation.
To study the influence of the avatar representation
during assembly tasks, we focused on the
representation of the hands and arms during the task.
The participants were not explicitly instructed to take
a closer look at the full body of the avatar but could
do so at any time.
Figure 3 to 5 show the three views
of the participants on the avatar during the tasks.
In the experiment, the participants had to
assembly a toy truck using equipment on two
workstations that where placed in a workshop-style
basement area. One workstation was an assembly
table with a height-adjustable table top and swivel
arms. The second workstation was a table with a drill
press mounted to it. Both workstations were equipped
with a virtual monitor on which the assembly steps
were explained.
Figure 3: Participants view on the “hands_only” avatar
during the assembly task.
Figure 4: Participants view on the “full_body_lowpoly”
avatar during the assembly task.
For each kind of avatar representation, the
participants had to fulfil the same tasks: at first, they
had to grab a car chassis and a wheel out of the
containers in the swivel arms, then they had to move
to the drill press to drill a hole in the wheel: After they
Figure 5: Participants view on the “full_body_highpoly”
avatar during the assembly task.
had put the wheel under the drilling press, they
switched on the machine and moved the feed lever to
the drill position. This procedure was repeated for all
four wheels. Afterwards, the participants pre-
assembled the wheels to the chassis by snapping them
on the axles and moved back to the assembly table.
Here they grabbed four screws out of the small load
carriers and put them on the right position on the
wheels. Then they took the screwdriver and screwed
all four screws into the axles, securing the wheels.
The last steps was to clip the truck bed on the chassis.
For moving in the virtual room, the participants
used real walking in the tracking space.
3.3 Methods
A within-subject study with the kind of avatar
representation as independent variable was
conducted. The study started with the participation
information and the data protection declaration as
well a short general questionnaire about previous
experience in VR. Afterwards, the instructor shortly
explained the Vive trackers and put them on the
participant’s feet. Before starting the test scenario, the
participants completed a quick tutorial, which showed
them how to move in the virtual environment and how
to pick things up. Then they started the assembly task
with the avatar representation in a randomized order.
After finishing the assembly task with one avatar,
they took off the HMD and filled out the
questionnaires. Then they fulfilled the assembly task
with the second avatar representation and repeated
this procedure. During the task, the participants read
the instructions for the assembly on two virtual
screens behind the tables, displaying the necessary
information regarding the order of the assembly steps.
All participants completed the tasks for all three
avatar representations successfully. The completion
time was not a main focus of the study.
To answer the research question, the presence and
acceptance factors were evaluated with post-test
questionnaires. The perceived presence was assessed
with a shortened version of the ITC-SOPI (Lessister
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
20
et al., 2001), which included only 12 instead of 44
items and was ranked on a five-point Likert scale. The
ITC-SOPI contains four factors, which were
measured by the three top loading items per scale.
Sense of physical space: indicates “a sense of
physical placement in the mediated environment, and
interaction with and control over parts of the
mediated environment” (Lessister et al., 2001).
Engagement: includes the “user’s involvement
and interest in the content of the displayed
environment, and their general enjoyment of the
media experience” (Lessister et al., 2001).
Ecological validity: evinces the believability and
the realism of the content as well as the naturalness of
the environment (Lessister et al., 2001).
Negative effects: summarizes “adverse
physiological reactions” (Mania and Chalmers, 2004)
e.g. motion sickness, dizziness of virtual
environments.
For the assessment of the acceptance of the avatar
representation, we used the acceptance scale of Van
Der Laan et al. (1997). This scale contains nine Likert
items, which refer to the two dimensions usefulness
and satisfaction.
Based on previous work described in Section 2,
we defined the following hypotheses:
H1: A part body avatar reaches better presence
values for the factors sense of physical space,
ecological validity and negative effects: Previous
studies show that simplified virtual hands lead to a
better controllability (Argelaguet et al., 2016) and it
is also evaluated that failures in the representation of
the user’s movements lead to reduced sense of
presence and embodiment (Ehrsson et al., 2004;
Slater and Steed, 2000; Tsakiris and Haggard, 2005).
It is suspected that the “hands_only” avatar reaches
significantly higher ecological validity values than
the more error-prone full body manikins.
Additionally, occasionally occurring incapabilities of
the full body avatars to perfectly represent the user’s
movements due to tracking and animation constraints
could lead to additional negative effects, because the
failures in the representations of the limbs could be
experienced as unpleasant.
H2: A part body avatar reaches higher acceptance
values due to the possible uncanny valley effect (Mori
et al., 2012) and the findings by Lugrin et al. (2015a)
that supposedly a less realistic avatar is more
acceptable.
H3: A higher fidelity full body manikin reaches a
higher ecological validity than a full body
representation with lesser details in shading,
geometry and textures.
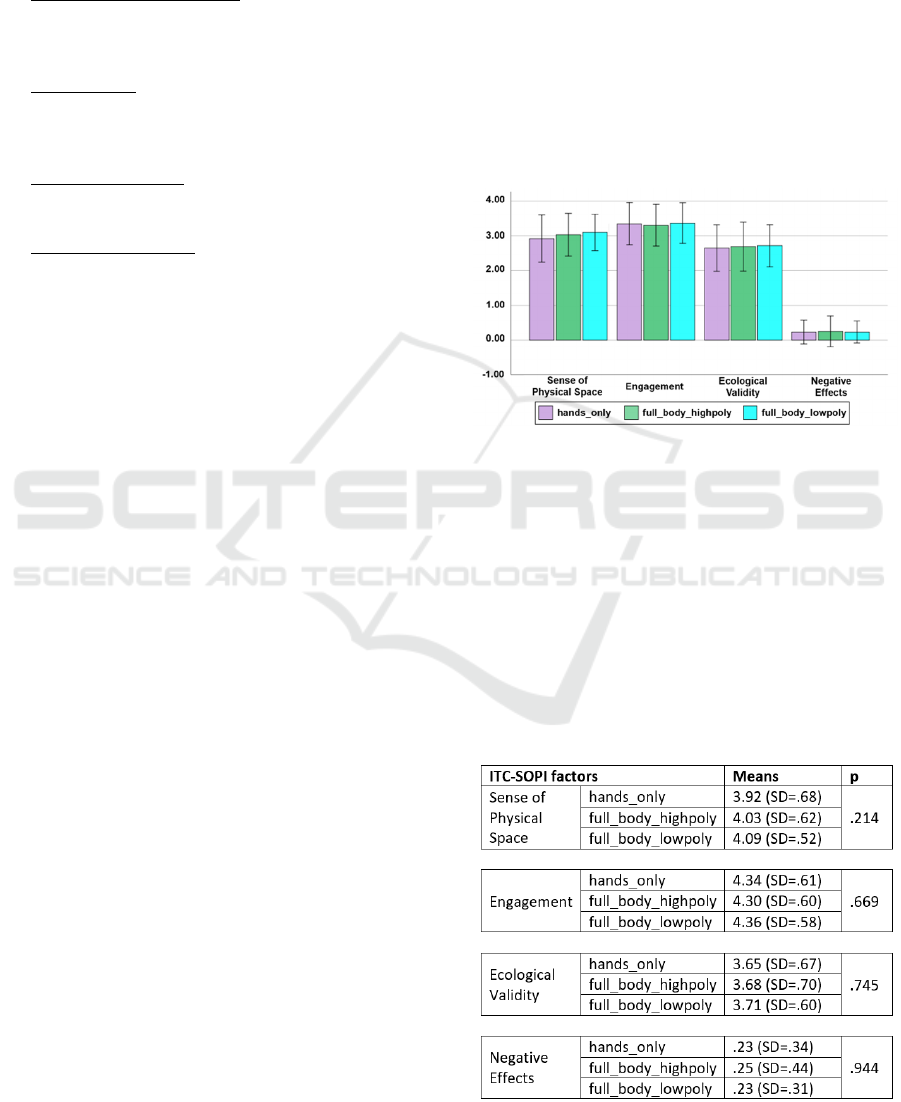
4 RESULTS
To evaluate the influence of different avatar
representations during an assembly task, we
compared the results of the presence factors of the
ITC-SOPI between the different representations.
Figure
6 shows the bar charts of the means and
standard deviations of the presence factors for all
three kinds of avatars.
Figure 6: Bar charts of the means of the presence factors for
the three avatar representations.
In
Table
1 the means and standard deviations of the
presence factors are shown. A Shapiro-Wilk test
showed that the presence factors are not normally
distributed. Therefore, we analysed the data with a
Friedman test for paired samples at the 5%
significance level. The results are also presented in
Table
1. There are no significance effects of the kind
of avatar representation on the ITC-SOPI-scores.
Table 1: Means, (standard deviations) and p-values of the
ITC-SOPI factors for the three avatar representations.
Impact of First Person Avatar Representation in Assembly Simulations on Perceived Presence and Acceptance
21
To test if there were significant differences
between respectively two kinds of avatar
representations in the ITC-SOPI factors, we
conducted a Wilcoxon signed-rank test for paired
samples at the 5% significance level. No significance
differences between the kinds of avatar presentations
on the ITC-SOPI factors were found. The results of
the significance test are shown in
Table
2.
Table 2: Results of the Wilcoxon signed-rank test for the
ITC-SOPI factors.
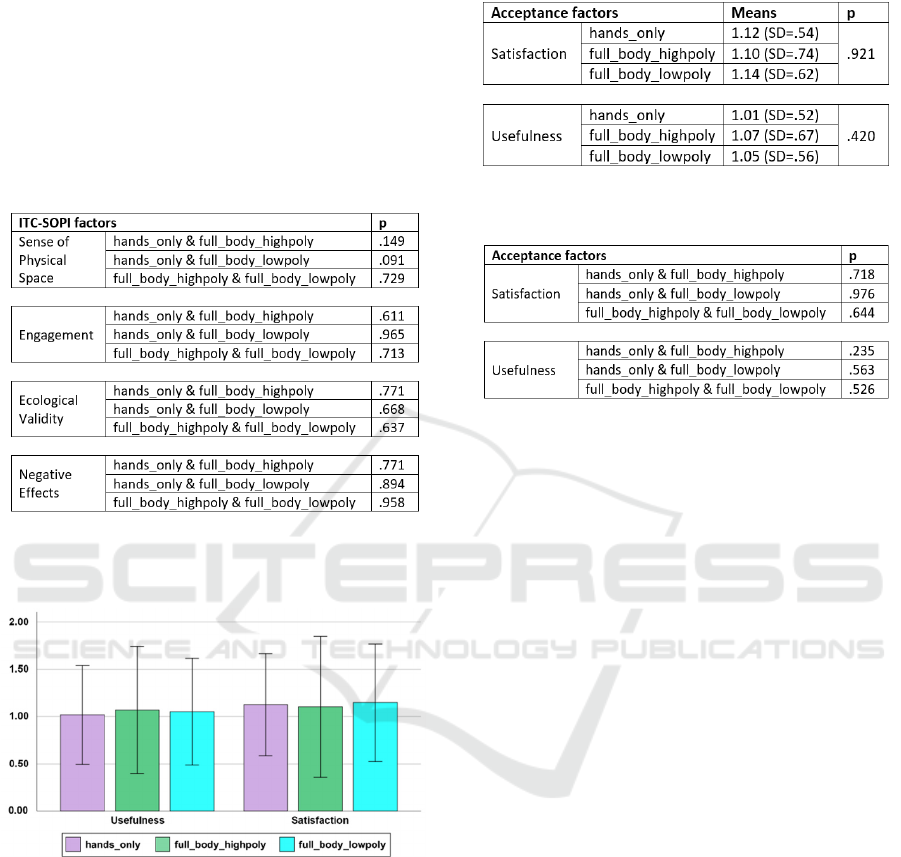
For the evaluation of the acceptance of the avatar
representations, we also calculated the means and
standard deviations (see Figure 7 and
Table
3).
Figure 7: Bar charts of the means of the acceptance scale
factors for the three avatar representations.
A Shapiro-Wilk test indicates, that the
assumption of normality had been violated. Thus, a
Friedman test for paired samples at the 5%
significance level was calculated (see
Table
3).
There was no significance effect of the avatar
presentation on the acceptance scale detected.
A Wilcoxon signed-rank test for paired samples
at the 5% significance level was conducted to check
for significant differences between two kinds of
avatar representation on the acceptance scale, but
result in no significant differences (see
Table
4).
Table 3: Means, (standard deviations) and p-values of the
acceptance scale factors for the three avatar representations.
Table 4: Results of the Wilcoxon signed-rank test for the
acceptance scale.
5 DISCUSSION
Overall, all three avatars reached high values for
presence and a good acceptance score. The results for
the factor “Sense of Physical Space” obtain a very
high score for all avatars, which indicates that the
participants had the feeling of being placed in the
virtual room and that they felt positively about the
available interactions and the controllability of the
task. Additionally, the feature of real walking
supports the feeling of being placed. The ranking of
the “Engagement” factor reached very high values,
which strengthens the assessment that the participants
enjoyed the tasks and the way they could interact with
and within the virtual world. These findings were
supported by the feedback the participants gave to the
instructor.
The results of the significance tests revealed no
significant differences between the avatar
representation on the scores of ITC-SOPI and the
acceptance scale. Therefore, H1, H2 and H3 have to
be rejected. The explanation of these findings refers
to several factors: First, all the representations of the
avatars showed too much similarities, especially in
the visualisation and animation of the hands, so that
the perceived differences where too small to be
mirrored by the questionnaires.
The second factor is that the participants had little
to no contact with VR-scenarios before, making it
possible that this lack of experience could bias their
assessment of the visualisations due to the small
sample size they could compare it to. The low
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
22

experience levels regarding VR could also affect the
enjoyment of the virtual task, considering the novelty
character of the sensation of exploring virtual
Environments (Brade et al., 2017). This is
strengthened by the exceedingly positive feedback
the participants gave to the instructor. More
experienced users could be expected to display a
more critical view on the presented avatars, but the
sample set of the study did not allow such an
evaluation.
The third and most important factor is, that the
participants noticed no significant differences in the
avatar representations for they were primarily
focused on the tasks and had a limited view on the
parts of the avatars, besides from the hands itself.
Even though the focus of the study was deliberately
laid on such a first person view during a table-based
assembly task for exactly these reasons, the
differences between the floating hands and the full
body avatars were expected greater. As the attention
of the participants lied mainly on the hands and not
on the other body parts, for all tasks consisted mainly
of manual tasks, the findings of this study should be
verified for other actions, like climbing stairs or
sitting down on chairs, for example.
These factors are corroborated by the findings of
Lugrin et al. (2015b): They showed that there are no
significant difference between non-realistic and
realistic self-avatars, though limited to the
representation of the users arm, when the tasks that
need to be fulfilled draw the users attention away
from mainly beholding the avatar. This is in contrast
with situations where the user beholds the avatar not
only from the first person view but also in a virtual
mirror. Then “realistic avatars also evoked a
significantly higher acceptance of the virtual body to
be one’s own body concerning the illusion of virtual
body ownership” which was shown by Latoschik et
al. (2017) Therefore, it can be expected that the time
the user has time to actively behold the avatar is an
influencing factor for presence and acceptance.
Particular because there are no significant
differences measured, the outcome of the study
lessens the effort needed to create VR based training
and education scenarios, because it indicates, that
there is no necessity for a highly detailed avatar to
strengthen the perceived presence and acceptance
during such scenarios containing mainly manual
assembly task. Therefore, difficult and time-
consuming creation processes regarding anatomically
correctly modelled and tracking-based animated
avatars can be reduced to focus on the body parts
directly needed to fulfil the given training tasks.
6 CONCLUSIONS
The current study evaluated the effect of different
avatars on perceived presence and acceptance during
a manual assembly task. The results show that the
tested avatars did not differ significantly concerning
presence and acceptance measures. Both full body
manikins reached high presence and acceptance
values as well as the “floating hands” avatar.
Therefore, it can be concluded that, if the focus of the
simulated task lies on manual activities during which
the view on the avatar is mainly limited to the hands
and arms, no full body manikin is necessary.
Because the conducted study considered mainly
manual, table-based assembly activities, the
transferability of the results on other task is limited.
To proof the findings on other tasks, a second study
should address assembly and maintenance task which
involve different postures, like crouching, climbing,
or in general involve more body-related activities.
ACKNOWLEDGEMENTS
This project is co-financed with tax money based on
the state budget, passed by the representatives of the
Saxon Landtag.
REFERENCES
Argelaguet, F., Hoyet, L., Trico, M., & Lécuyer, A. 2016.
The role of interaction in virtual embodiment: Effects
of the virtual hand representation. Paper presented at
the 2016 IEEE Virtual Reality (VR).
Brade, J., Lorenz, M., Busch, M., Hammer, N., Tscheligi,
M., & Klimant, P. 2017. Being there again–presence in
real and virtual environments and its relation to
usability and user experience using a mobile navigation
task. International Journal of Human-Computer
Studies, 101, 76-87.
Ehrsson, H. H., Spence, C., & Passingham, R. E. 2004.
That's my hand! Activity in premotor cortex reflects
feeling of ownership of a limb. Science, 305(5685),
875-877.
Gerhard, M., Moore, D. J., & Hobbs, D. J. 2001.
Continuous presence in collaborative virtual
environments: Towards a hybrid avatar-agent model
for user representation. Paper presented at the
International Workshop on Intelligent Virtual Agents.
Heidicker, P., Langbehn, E., & Steinicke, F. 2017.
Influence of avatar appearance on presence in social
Impact of First Person Avatar Representation in Assembly Simulations on Perceived Presence and Acceptance
23

VR. Paper presented at the 2017 IEEE Symposium on
3D User Interfaces (3DUI).
Jung, S., & Hughes, C. E. 2016. The effects of indirect real
body cues of irrelevant parts on virtual body ownership
and presence. Paper presented at the Proceedings of the
26th International Conference on Artificial Reality and
Telexistence and the 21st Eurographics Symposium on
Virtual Environments.
Kilteni, K., Groten, R., & Slater, M. 2012. The sense of
embodiment in virtual reality. Presence: Teleoperators
and Virtual Environments, 21(4), 373-387.
Latoschik, M. E., Roth, D., Gall, D., Achenbach, J.,
Waltemate, T., & Botsch, M. 2017. The effect of avatar
realism in immersive social virtual realities. Paper
presented at the Proceedings of the 23rd ACM
Symposium on Virtual Reality Software and
Technology.
Lenggenhager, B., Tadi, T., Metzinger, T., & Blanke, O.
2007. Video ergo sum: manipulating bodily self-
consciousness. Science, 317(5841), 1096-1099.
Lessister, J., Freeman, J., Keogh, E., & Davidoff, J. 2001.
A Cross-Media Presence Questionnaire: The ITC-
Sense of Presence Inventory. Presence: Teleoperators
and Virtual Environments, 10 (3), 282-297.
Lok, B., Naik, S., Whitton, M., & Brooks, F. P. 2003.
Effects of handling real objects and self-avatar fidelity
on cognitive task performance and sense of presence in
virtual environments. Presence: Teleoperators &
Virtual Environments, 12(6), 615-628.
Lugrin, J.-L., Latt, J., & Latoschik, M. E. 2015a. Avatar
anthropomorphism and illusion of body ownership in
VR. Paper presented at the 2015 IEEE Virtual Reality
(VR).
Lugrin, J.-L., Wiedemann, M., Bieberstein, D., &
Latoschik, M. E. 2015b. Influence of avatar realism on
stressful situation in VR. Paper presented at the 2015
IEEE Virtual Reality (VR).
Mania, K., & Chalmers, A. 2004, July. The Effects of
Levels of Immersion on Memory and Presence in
Virtual Environments: A Reality Centered Approach.
CyberPsychology & Behavior 4 (2), 247-364.
Maselli, A., & Slater, M. 2013. The building blocks of the
full body ownership illusion. Frontiers in human
neuroscience, 7, 83.
Mori, M., MacDorman, K. F., & Kageki, N. 2012. The
uncanny valley [from the field]. IEEE Robotics &
Automation Magazine, 19(2), 98-100.
Nash, E. B., Edwards, G. W., Thompson, J. A., & Barfield,
W. 2000. A review of presence and performance in
virtual environments. International Journal of human-
computer Interaction, 12(1), 1-41.
Petkova, V. I., & Ehrsson, H. H. 2008. If I were you:
perceptual illusion of body swapping. PloS one, 3(12),
e3832.
Sanchez-Vives, M. V., Spanlang, B., Frisoli, A.,
Bergamasco, M., & Slater, M. 2010. Virtual hand
illusion induced by visuomotor correlations. PloS one,
5(4), e10381.
Schuemie, M. J., van der Straaten, P., Krijn, M., & van der
Mast, C. A. P. G. 2001. Research on Presence in Virtual
Reality: A Survey. CyberPsychologie & Behavior 4 (2),
183-201.
Slater, M. 1999. Measuring presence: A response to the
Witmer and Singer presence questionnaire. Presence,
8(5), 560-565.
Slater, M., & Steed, A. 2000. A virtual presence counter.
Presence: Teleoperators & Virtual Environments, 9(5),
413-434.
Slater, M., Usoh, M., & Steed, A. 1995. Taking steps: the
influence of a walking technique on presence in virtual
reality. ACM Transactions on Computer-Human
Interaction (TOCHI), 2(3), 201-219.
Slater, M., & Wilbur, S. 1997. A Framework for Immersive
Virtual Environments (FIVE): Speculations on the Role
of Presence in Virtual Environments. Presence:
Teleoperators and Virtual Environments, 6 (6), 603-
616.
Steed, A., Pan, Y., Zisch, F., & Steptoe, W. 2016. The
impact of a self-avatar on cognitive load in immersive
virtual reality. Paper presented at the 2016 IEEE
Virtual Reality (VR).
Tanaka, K., Nakanishi, H., & Ishiguro, H. 2015. Physical
embodiment can produce robot operator’s pseudo
presence. Frontiers in ICT, 2, 8.
Tsakiris, M., & Haggard, P. 2005. The rubber hand illusion
revisited: visuotactile integration and self-attribution.
Journal of Experimental Psychology: Human
Perception and Performance, 31(1), 80.
Van Der Laan, J. D., Heino, A., & De Waard, D. 1997. A
simple procedure for the assessment of acceptance of
advanced transport telematics. Transportation
Research Part C: Emerging Technologies, 5(1), 1-10.
Waltemate, T., Gall, D., Roth, D., Botsch, M., & Latoschik,
M. E. 2018. The impact of avatar personalization and
immersion on virtual body ownership, presence, and
emotional response. IEEE transactions on visualization
and computer graphics, 24(4), 1643-1652.
Weiss, P. L., Kizony, R., Feintuch, U., & Katz, N. 2006.
Virtual reality in neurorehabilitation. Textbook of
neural repair and rehabilitation, 51(8), 182-197.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
24
