
Detection, Counting and Maturity Assessment of Cherry Tomatoes using
Multi-spectral Images and Machine Learning Techniques
I-Tzu Chen and Huei-Yung Lin
Department of Electrical Engineering, National Chung Cheng University, Chiayi 621, Taiwan
Keywords:
Yield Estimation, Maturity Assessment, Object Detection, Object Counting, Multi-object Tracking.
Abstract:
This paper presents an image-based approach for the yield estimation of cherry tomatoes. The objective is to
assist farmers to quickly evaluate the amount of mature tomatoes which are ready to harvest. The proposed
technique consists of machine learning based methods for detection, counting, and maturity assessment using
multi-spectral images. A convolutional neural network is used for tomato detection from RGB images, fol-
lowed by the maturity assessment using spectral image analysis with SVM classification. The multi-object
tracking algorithm is incorporated to obtain a unique ID for each tomato to avoid double counting during the
camera motion. Experiments carried out on the real scene images acquired in an orchard have demonstrated
the effectiveness of the proposed method.
1 INTRODUCTION
As the world’s farming population is decreasing and
growing older, automated agriculture has become an
important trend in the future. One major issue to deal
with is the yield estimation of crop production, which
is highly related to the harvest schedule, labor alloca-
tion, storage and transportation, etc. Having the right
time to harvest will also result in better food quality
and reduce the waste in the supply chain (Lobell et al.,
2015). To estimate the yield, taking fruits as an exam-
ple, one needs to consider not only the number count-
ing, but also the maturity inspection on each of them.
Through the on-site non-invasive maturity and harvest
assessment, the yield can be estimated on a daily or
weekly basis to avoid immaturity and spoilage of the
crops. This also provides a way to deliver fresh fruits
to the consumers with best natural quality.
In this paper, we present an image-based ap-
proach for the yield estimation of cherry tomatoes.
The objective is to assist farmers to quickly evalu-
ate the amount of mature tomatoes which are ready
to harvest. The proposed technique consists of ma-
chine learning based methods for detection, counting,
and maturity assessment using multi-spectral images.
Due to the cluttered scenes and backgrounds appeared
in the images, it is a challenging task to identify the
matured fruits in the orchard environment (Li et al.,
2011). Furthermore, multiple images captured from
different viewpoints are required to cover the work-
ing region for the detection and counting of tomatoes.
This is done by moving a camera in the orchard to
record video sequences, followed by the multiple ob-
ject tracking technique to assign the unique identities
for individual tomatoes.
Agricultural researchers have investigated fruit
detection in orchards with different sensor systems
for many decades (Gongal et al., 2015). The ob-
jective is to distinguish fruits from the background
(leaves, branches, flowers) for inspection or count-
ing. The commonly used devices are B/W or color
cameras, spectral cameras, and thermal cameras, etc.
With the camera based approaches, image features in-
cluding color, texture, edge and gradient are extracted
for object detection and classification. The classifica-
tion techniques such as K-means and KNN clustering,
Bayesian classifier, artificial neural network (ANN),
support vector machine (SVM) are then used to iden-
tify and localize the fruits. More recent machine
learning based approaches adopt convolutional neu-
ral networks (CNNs) for fruit detection and counting
within the trees. Nevertheless, it is a more challenging
task compared to the conventional fruit category clas-
sification in factories or supermarkets (Zhang et al.,
2014).
The fruit detection is essentially a problem of object
detection but with a specific category. It is further re-
stricted to the detection of a certain type of fruits, i.e.,
cherry tomato, in this application. However, different
from the detection and classification in households or
supermarkets, our task needs to deal with the com-
Chen, I. and Lin, H.
Detection, Counting and Maturity Assessment of Cherry Tomatoes using Multi-spectral Images and Machine Learning Techniques.
DOI: 10.5220/0008874907590766
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
759-766
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
759

plex background and occlusion in the orchards. In the
conventional image based approaches, Chaivivatrakul
and Dailey present a technique using texture anal-
ysis to detect green fruits on plants (Chaivivatrakul
and Dailey, 2014). The interested points are extracted
with a feature descriptor and classified by SVM. A se-
ries of morphological operations are then carried out
for the fruit region identification. They have reported
the detection rates of 85% and 100% for pineapple
and bitter melon, respectively. To overcome the unre-
liable recognition problems caused by uneven illumi-
nation, partial occlusion, and similar background fea-
tures, Rakun et al. propose a method combining color,
texture and 3D shape properties of the objects (Rakun
et al., 2011). Multiple images captured from different
viewpoints are used to separate potential regions from
the background. The fruit size and yield are also esti-
mated with texture analysis and reconstruction in 3D
space.
In addition to the classification methods based on
SVM, there are also K-means and KNN clustering
techniques for fruit detection. Bulanon et al. develop
a robotic harvesting system with automatic recogni-
tion of Fuji apples on the trees (Bulanon et al., 2002).
The images are enhanced with the color difference,
and the intensity histogram is used to separate the
background. With K-means clustering, they have re-
ported a success rate of 88% using the optimal thresh-
old. In (Yamamoto et al., 2014), a method is pre-
sented to detect intact tomatoes using a modified K-
means clustering algorithm. It does not require man-
ual threshold adjustment and is able to separate the
mature, immature and young tomatoes on a plant.
Seng and Mirisaee develop a fruit recognition using
KNN classification (Woo Chaw Seng and Mirisaee,
2009). They adopt color, shape and size features to
classify and recognize seven kinds of fruits with about
90% of accuracy. However, the proposed technique
might not work in the complex outdoor environment.
More recently, deep learning approaches are
adopted for precision agriculture research (Kamilaris
and Prenafeta-Bold, 2018). Sa et al. present a fruit
detection system using deep convolutional neural net-
works (Sa et al., 2016). They adopt Faster R-CNN
(Ren et al., 2017) as the detection framework and use
color and near infrared images as the input. Through
the transfer learning, this multi-modal Faster R-CNN
model has achieved better results on seven kinds of
fruits compared to the previous work. Bargoti and
Underwood also present a Faster R-CNN based ap-
proach for fruit detection in orchards (Bargoti and
Underwood, 2017). They specifically focus on the
data augmentation techniques used for performance
improvement. The results provide a high F-1 score of
0.9 with hundred fruits per image for detection. Dif-
ferent from the above two-stage detection technique,
Bresilla et al. propose a method based on a single-
shot detector for fruit detection within the tree canopy
(Bresilla et al., 2019). Their network architecture is
based on YOLO (Redmon and Farhadi, 2017) and
fine-tuned with apple and pear images. The exper-
iments demonstrate the processing speed of 20 fps,
which is sufficient for real-time applications.
2 METHOD
The proposed technique uses a hand-held device for
yield estimation of cherry tomatoes in the orchards.
We integrate object detection, spectral information
and multi-object tracking to identify the amount of
tomatoes and the level of maturity. Figure 1 shows
the system flowchart of the proposed technique. The
RGB images are passed to a detection network to
identify the position of each tomato. The maturity
of individual tomato is determined by spectral image
analysis using NDVI images. A unique ID for each
tomato is then obtained using a multi-object tracking
network to avoid double counting. Finally, the yield
estimation is given by counting with different matu-
rity levels.
2.1 Detection Network
This paper adopts the two-stage detector Faster R-
CNN (Ren et al., 2015) as the main detection net-
work. The network architecture has a higher detection
accuracy than one-stage detectors and better detec-
tion speed than the semantic segmentation techniques.
From the experimental results of Faster R-CNN, using
the deeper VGG16 (Simonyan and Zisserman, 2014)
has a better accuracy than using a shallower network,
but there is a degradation problem when constantly
deepening the neural network. The accuracy rises first
and then saturates, and keeping increasing the depth
will result in a decrease in accuracy. One reason is
that, the deeper the network, the more obvious the
gradient disappears. This causes the network parame-
ters cannot be updated. ResNet (He et al., 2016) intro-
duces a residual network structure which can continue
to deepen the network layers. It is adopted to improve
the final classification results.
When Faster R-CNN performs object detection,
whether it is RPN or CNN, the RoI acts on the last
layer. This might not be a problem for large target
detection. But there is virtually no semantic informa-
tion for small targets when pooling to the last layer. A
classic way to deal with small objects is to use image
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
760
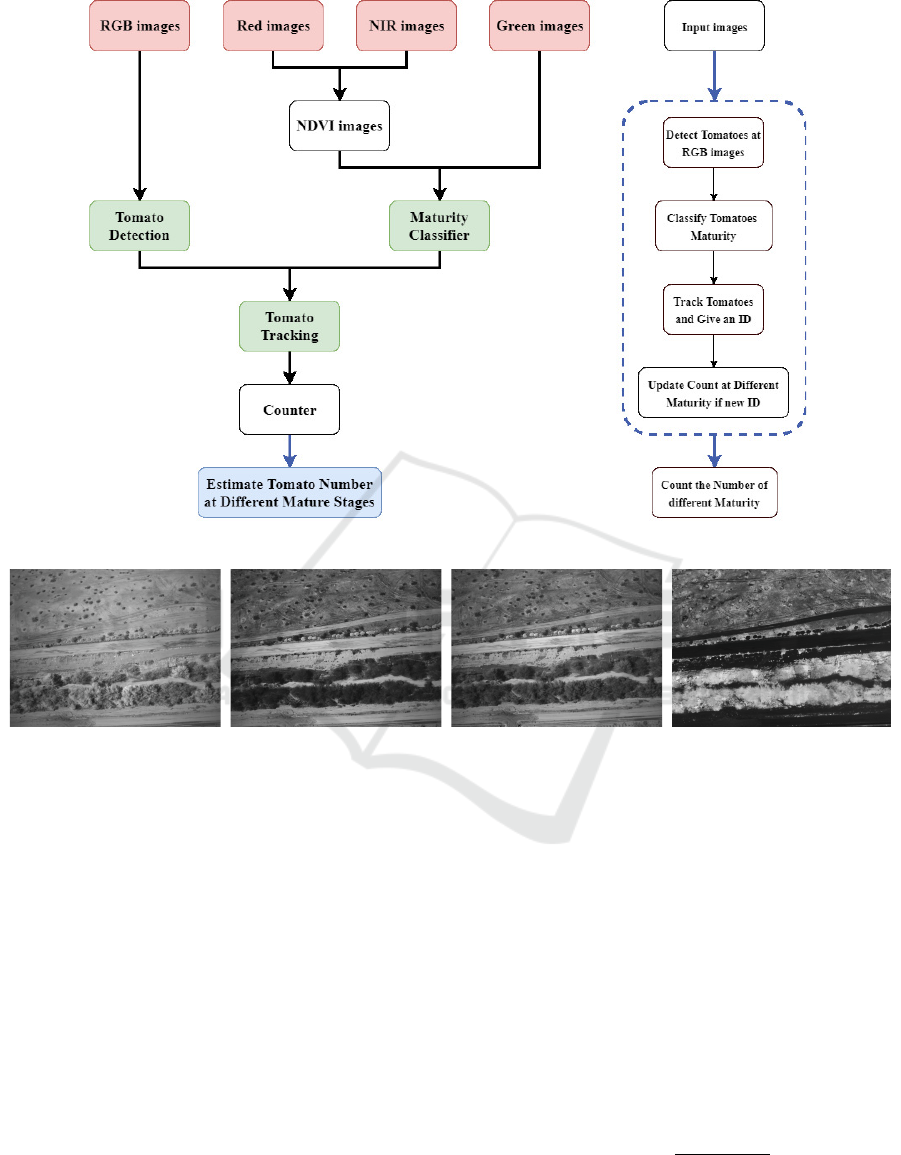
Figure 1: The system flowchart of the proposed tomato yield estimation technique.
(a) NIR image (b) red image (c) green image (d) NDVI image
Figure 2: The multi-spectral image consists of NIR, red and green channels. The green and NDVI images are used for maturity
assessment.
pyramids to take multi-scale variations of the images
during training and testing. This will also increase the
computation significantly. The feature pyramid net-
works (FPN) (Lin et al., 2017) is introduced to solve
the multi-scale detection problem. The FPN struc-
ture is designed with bottom-up and top-down path-
ways, and lateral connections to fuse the high resolu-
tion shallow features and the deep features with rich
semantic information. This can quickly construct a
feature pyramid with strong semantic information at
all scales from a single-scale input image without a
significant cost.
2.2 Maturity Assessment
The sunlight contains X-ray, ultraviolet, visible light,
infrared, etc. The visible spectrum can be formed by
red, green and blue light, and consists of million col-
ors for human vision perception. In addition to the
conventional RGB images, spectral cameras can be
used to capture the images with the light that is not
visible to human. For those beyond the visible spec-
trum, the near-infrared (NIR) images are often used in
agriculture, and a variety of spectral images are com-
bined and used for analysis. The normalized differ-
ence vegetation index (NDVI) images are the most
widely studied and adopted. NIR is a specific value
which reflects the vitality and productivity of plants.
NDVI calculates the reflection of red light by
NDVI =
NIR − RED
NIR + RED
(1)
where NIR is near-infrared reflection, RED is red
light reflection, and the value of NDVI is between −1
and 1. When RED = 0, there is a maximum value of
Detection, Counting and Maturity Assessment of Cherry Tomatoes using Multi-spectral Images and Machine Learning Techniques
761

1; and conversely, when NIR = 0, there is a minimum
value of −1. The higher the value, the stronger the
plant vigor. It is especially suitable for assessing the
difference in the plant growth status and is also a good
tool to monitor the health and vitality of plants in the
field.
Healthy green plants contain much chlorophyll.
Chlorophyll reflects a few red light after absorbing
visible light, but strongly reflects green light and NIR.
A comprehensive analysis on the NIR and red images
(see Figures 2(a) and 2(b), respectively) can obtain
the NDVI image, as shown in Figure 2(d). The si-
multaneous analysis on the green image (see Figure
2(c)) and the NDVI image can monitor the health sta-
tus of plants and the vitality of photosynthetic pig-
ments. Both images provide more clear growth infor-
mation than the visible and NIR images. The spectral
index usually combines the reflectance of two or more
wavelengths to extract the features of interest. Be-
cause these values are easily affected by sensors and
ambient light, it is difficult to use only one wavelength
as the evaluation indicator. This paper uses green and
NDVI images for maturity assessment.
2.3 Tracking Network
The multi-object tracking approach is used to count
the number of fruits in dense detection results. It iden-
tifies the appearance characteristics of the targets, and
calculates the individual motion curves. The targets
can then be matched among different frames. Al-
though a few occlusion cases can be recovered un-
der the camera movement, many fruits are still ob-
scured by stems and leaves. To avoid counting the
same fruit after a long-term occlusion, it is required
to track each of them so we can have a unique ID af-
ter occlusion. Because each target has a fixed ID, the
amount of moving objects in the image sequence can
be determined. We use multi-object tracking to deter-
mine the ID of each detected tomato, and then count
the amount of tomatoes in the whole image sequence.
This paper adopts the multi-object tracking
method DeepSORT (Wojke et al., 2017). It improves
the ID switching problem after occlusion in the SORT
algorithm (Bewley et al., 2016). DeepSORT presents
an extension to SORT that incorporates the appear-
ance information through a pre-trained association
metric. Its target state is represented by the position,
aspect ratio, height, and velocity at the center of the
bounding box, and the Kalman filter (Kalman, 1960)
is then used to predict and update the tracking trajec-
tory. The matching metric is derived by fusing motion
and appearance information, and then used to analyze
the association between the existing target and the de-
(a) Non-open air orchard. (b) Open air orchard.
Figure 3: The tomato planting space consists of non-open
and open air orchards.
tection. A deep convolutional neural network (cosine
index learning) is established to extract the appear-
ance features of the target, where the cosine index
learning is trained on a large-scale re-identification
dataset.
3 DATASETS
Several public datasets for fruit classification and
identification are shown in Table 1. Since there are
not suitable for tomato yield estimation in this work,
we have collected our own dataset for both training
and testing.
Depending on the variety of tomatoes, there are
two types of tomato planting space: the non-open air
space as shown in Figure 3(a) and the open air space
as shown in Figure 3(b). Our data collecting sites are
mostly the non-open air space. The distance within
the scaffold is about 80 cm. We move the camera
along the plants at about 50 cm to capture a larger
range of the scaffold. It is also less affected by the
tomato vines during the image acquisition process.
Three devices are used, a spectral camera Parrot SE-
QUOIA+, a digital camera Nikon Coolpix P7000, and
an iPhone 8 Plus mobile phone.
The training data used by Faster R-CNN are the
images taken by an iPhone 8 Plus. For maturity as-
sessment, the testing is carried out using the images
taken by the spectral camera Parrot SEQUOIA+. On
the testing stage, the images taken by iPhone 8 Plus
are only used to evaluate the detection performance.
There are totally 1,086 and 342 images used for train-
ing and testing, respectively. Originally, DeepSORT
trains the cosine metric learning model with large
pedestrian datasets Market1501 and MARS (Zheng
et al., 2016). This is not suitable for the tomato re-
lated application in this work. We have fine-tuned us-
ing our tomato training dataset based on the MARS
format. For DeepSORT tracking, there are additional
105 and 40 images used for training and testing, re-
spectively, and some images are shown in Figure 4.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
762
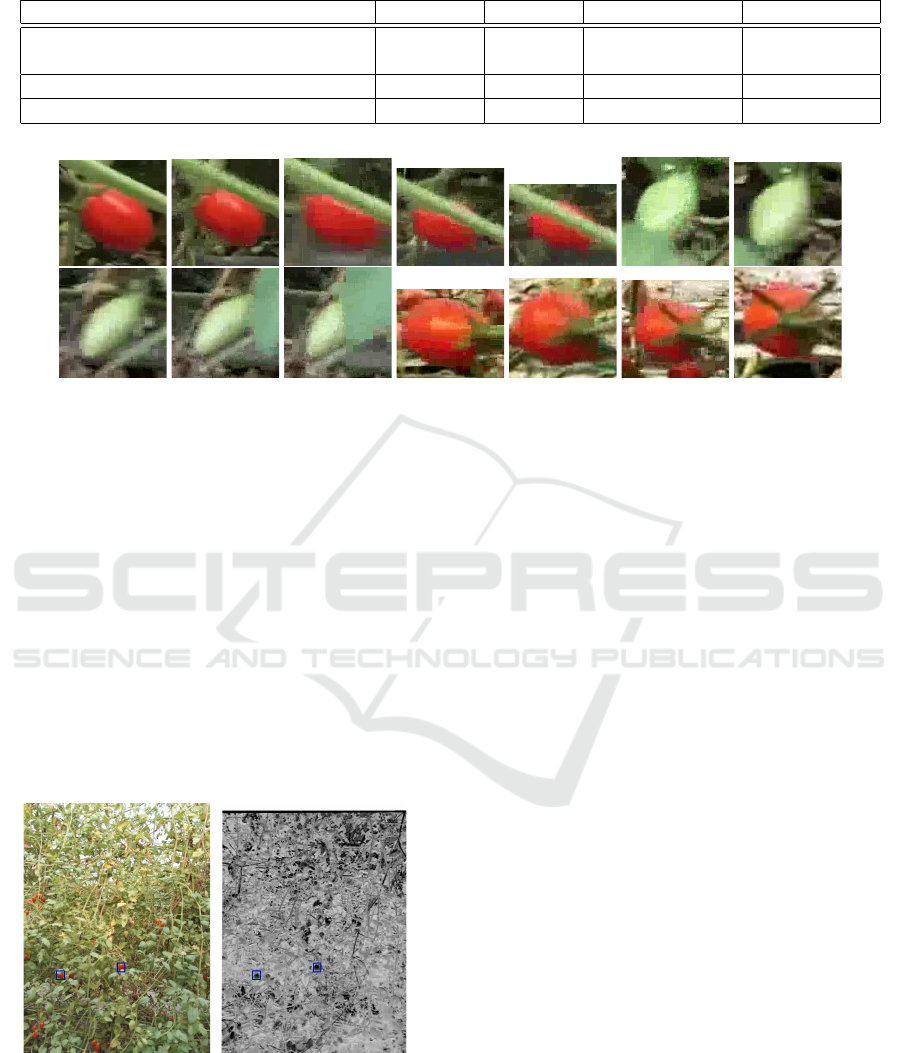
Table 1: The available public datasets for fruit recognition.
Dataset # of image # of class Image resolution Tomato image
Fruits-360 (Mures¸an and Oltean, 2018)
77,917 114 100×100 pixels 4,654
(version: 2019.07.07.0)
Fruit recognition dataset (Hussain et al., ) 44,406 15 320×258 pixels 2,171
FIDS30 (
ˇ
Skrjanec Marko, 2013) 971 30 not fixed 46
Figure 4: Some training samples (mature and immature tomatoes) used for tracking.
4 EXPERIMENT
In the field experiments, the scaffolding is full of
tomatoes with different maturity levels. A spectral
camera is moved horizontally to capture the images
for yield estimation in a non-destructive way. The
RGB images are used by Faster R-CNN for tomato
detection, and the tomatoes in the green and NDVI
image are used for maturity assessment. DeepSORT
takes the detection result for tracking and obtains a
unique ID for each tomato. Each tomato has its own
ID and maturity, so the total number of tomatoes and
the numbers with different levels of maturity can be
derived.
Figure 5: The RGB image (left) and the NDVI image
(right). Tomato detection and tracking in the RGB image
is used for the NDVI image.
4.1 Detection and Maturity Assessment
The Faster R-CNN structure used in this work is com-
bined with ResNet-50 and FPN. Hundreds of labeled
still tomato images are imported to Faster R-CNN for
training. After training, the tomato video sequences
are used for detection and output the bounding boxes
of tomatoes in each frame. The training data con-
tain the images captured at different distances to cover
various camera positions in the application scenario.
To evaluate the detection performance, the testing im-
ages are taken with an iPhone 8 Plus. Table 2 tabu-
lates the results of tomato detection using Faster R-
CNN and YOLO v3 (Redmon and Farhadi, 2018),
including mAP, false prediction and true prediction.
The result shows that Faster R-CNN has a higher
mAP and a relatively high proportion of correct pre-
diction.
The tomatoes obtained by the detection network
correspond to the same positions of the green and
NDVI images as shown in Figure 5. The criterion for
maturity assessment of each tomato is determined by
the maturity classification obtained by SVM. It is di-
vided into two categories: mature and immature. Ac-
cording to this classification, the tomato maturity is
assessed with the bounding boxes.
There are four steps to generate the NDVI images
with the red and NIR images. First, we remove the
lens distortion from the Parrot SEQUOIA+ spectral
image, followed by the reflectivity calculation of the
undistorted image. The third step is to align the red
and undistorted NIR reflectance images with the orig-
Detection, Counting and Maturity Assessment of Cherry Tomatoes using Multi-spectral Images and Machine Learning Techniques
763
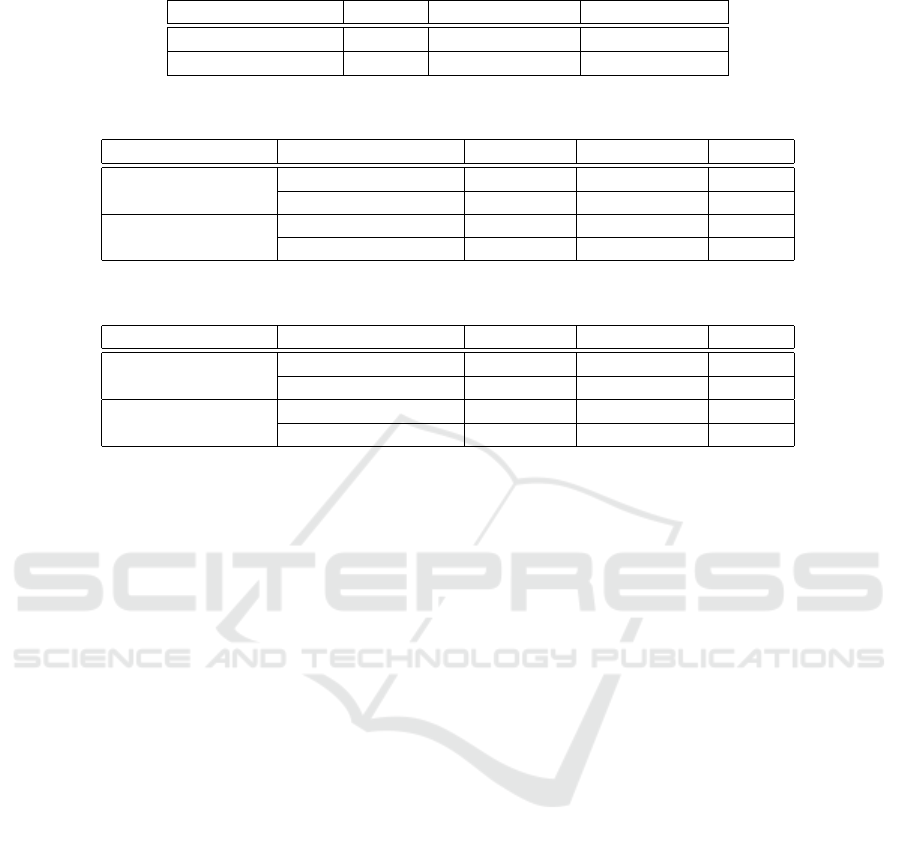
Table 2: The detection network evaluation results.
Detection Network mAP False Prediction True Prediction
Faster R-CNN 62.35% 925 3159
YOLO v3 53.50% 1319 2711
Table 3: The evaluation of the detection network and maturity.
Detection Network Histogram matching Mature AP Immature AP mAP
Faster R-CNN
3 55.22% 36.82% 46.02%
7 57.81% 32.46% 45.14%
YOLO v3
3 56.11% 25.28% 40.69%
7 51.46% 3.94% 27.72%
Table 4: The evaluation of maturity assessment.
Detection Network Histogram matching Mature AP Immature AP mAP
Faster R-CNN
3 99.59% 99.75% 99.67%
7 97.86% 98.96% 98.41%
YOLOv3
3 95.73% 97.21% 96.47%
7 93.15% 56.60% 74.87%
inal RGB image. Finally, the red and NIR images are
calculated to generate the NDVI image. To assess the
tomato maturity, the values of green and NDVI im-
ages are used as the two-dimensional input features.
The hyperplane of the SVM classification is a line.
The total number of SVM training samples is 42, and
the test accuracy is more than 90%. The detailed eval-
uation results are presented in Section 4.3.
4.2 Tomato Tracking
In the orchard scenes, the images of tomatoes are ob-
scure. We use DeepSORT to track the tomatoes, and
expect to achieve multi-object tracking and avoid the
ID switch problem caused by long-term occlusions at
the same time. DeepSORT utilizes the tomato posi-
tion detected by Fast R-CNN and traces it using the
cosine metric learning model trained in our tomato
dataset. This approach tracks the same tomato and
give it a unique ID to avoid the double counting prob-
lem. In Figure 6(b), the yellow number represents the
unique ID of each tomato, and the blue number in the
upper left corner indicates how many tomatoes have
been detected in the image sequence. We apply the
evaluation tool developed by the MOT competition.
The test video passes through the detection and track-
ing networks to generate the bounding box and ID of
the tomato. The information is then converted to the
format of the evaluation tool to calculate the accuracy.
Detailed evaluation results and comparisons are de-
scribed in Section 4.3.
For number counting with different maturity lev-
els, the image sequence is first passed to Fast R-CNN
to detect tomatoes in each frame, and obtain the fea-
tures on the green and NDVI images of each tomato
to determine its maturity. We then use DeepSORT
to track each tomato from its entering to leaving the
frame and retain the ID in the tracking to avoid double
counting. Finally, the ID and maturity information are
used to derive the number of tomatoes with different
maturity levels. Figure 6(c) shows a result with the
number of mature and immature tomatoes.
4.3 Comprehensive Evaluation
The performance evaluation is carried out on the de-
tection network and maturity assessment, simple ma-
turity assessment, and detection network and tracking
network. We compare different detection networks,
different tracking networks, and input images with
different hues. The inputs are the original images and
the histogram matching images. There are totally 191
images taken with Parrot SEQUOIA+ for testing.
The categories used to evaluate the detection net-
work and maturity assessment are tomato and ma-
ture/immature, respectively. The evaluation criteria
are mature AP, immature AP, and mAP. From the
results shown in Table 3, it is found that using the
histogram-matched images, with whether Faster R-
CNN or YOLOv3 for tomato detection, has higher
mAPs than using the original images. Compare Faster
R-CNN and YOLOv3, it can be seen that YOLOv3
performs poorly in the immature AP. This might be
due to the ability of YOLOv3 on detecting the green
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
764
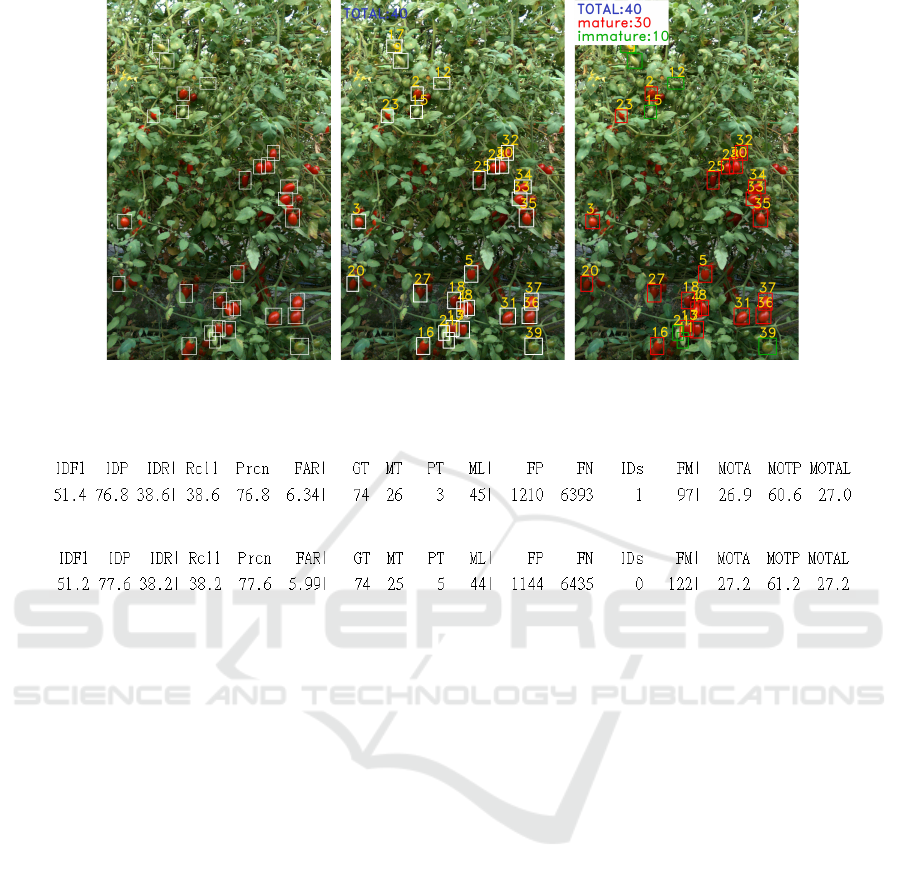
(a) Faster R-CNN result. (b) DeepSORT tracking. (c) Counting with maturity.
Figure 6: Some detection and tracking results obtained in the tomato orchard.
(a) SORT with Faster R-CNN
(b) DeepSORT with Faster R-CNN
Figure 7: The evaluation of the detection and tracking networks.
tomatoes that blend with the background.
The comprehensive evaluation of the detection
network with maturity assessment cannot see whether
the maturity assessment is accurate since the accuracy
is affected by the detection result. To evaluate the ma-
turity assessment exclusively, only the detected toma-
toes are evaluated. The results tabulated in Table 4
show that the accuracy of the maturity assessment is
very high, and the lowest one is the immature AP that
uses YOLOv3 without histogram matching. This is
mainly due to the sensitivity caused by a fairly small
number of immature samples. The maturity and im-
maturity of tomatoes are classified when evaluating
the detection and tracking networks. The MOT evalu-
ation method can only perform a comprehensive eval-
uation of the detection and tracking network without
maturity assessment. Figure 7 shows that using Deep-
SORT as the tracking network provides better evalua-
tion results than using SORT.
5 CONCLUSION
This paper presents an approach for detection, count-
ing, and maturity assessment of cherry tomatoes us-
ing multi-spectral images and machine learning tech-
niques. A CNN-based network is used for tomato de-
tection from RGB images, followed by the maturity
assessment using spectral image analysis with SVM
classification. The multi-object tracking algorithm is
incorporated to obtain a unique ID for each tomato
to avoid double counting during the camera motion.
A comprehensive evaluation carried out on the real
scene images captured in the orchard have demon-
strated the effectiveness of the proposed method for
the yield estimation.
REFERENCES
Bargoti, S. and Underwood, J. (2017). Deep fruit detec-
tion in orchards. In 2017 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
3626–3633.
Detection, Counting and Maturity Assessment of Cherry Tomatoes using Multi-spectral Images and Machine Learning Techniques
765

Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468. IEEE.
Bresilla, K., Perulli, G. D., Boini, A., Morandi, B., Grap-
padelli, L. C., and Manfrini, L. (2019). Single-shot
convolution neural networks for real-time fruit detec-
tion within the tree. Frontiers in plant science, 10.
Bulanon, D., Kataoka, T., Ota, Y., and Hiroma, T. (2002).
Aeautomation and emerging technologies: A segmen-
tation algorithm for the automatic recognition of fuji
apples at harvest. Biosystems Engineering, 83(4):405
– 412.
Chaivivatrakul, S. and Dailey, M. N. (2014). Texture-based
fruit detection. Precision Agriculture, 15(6):662–683.
Gongal, A., Amatya, S., Karkee, M., Zhang, Q., and Lewis,
K. (2015). Sensors and systems for fruit detection and
localization: A review. Computers and Electronics in
Agriculture, 116:8 – 19.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hussain, I., He, Q., and Chen, Z. Automatic fruit recogni-
tion based on dcnn for commercial source trace sys-
tem.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of basic Engineer-
ing, 82(1):35–45.
Kamilaris, A. and Prenafeta-Bold, F. X. (2018). Deep learn-
ing in agriculture: A survey. Computers and Electron-
ics in Agriculture, 147:70 – 90.
Li, P., heon Lee, S., and Hsu, H.-Y. (2011). Review on fruit
harvesting method for potential use of automatic fruit
harvesting systems. Procedia Engineering, 23:351 –
366. PEEA 2011.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lobell, D. B., Thau, D., Seifert, C., Engle, E., and Little, B.
(2015). A scalable satellite-based crop yield mapper.
Remote Sensing of Environment, 164:324 – 333.
Mures¸an, H. and Oltean, M. (2018). Fruit recognition from
images using deep learning. Acta Universitatis Sapi-
entiae, Informatica, 10(1):26–42.
Rakun, J., Stajnko, D., and Zazula, D. (2011). Detect-
ing fruits in natural scenes by using spatial-frequency
based texture analysis and multiview geometry. Com-
puters and Electronics in Agriculture, 76(1):80 – 88.
Redmon, J. and Farhadi, A. (2017). YOLO9000: better,
faster, stronger. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition, CVPR 2017,
Honolulu, HI, USA, July 21-26, 2017, pages 6517–
6525.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster r-
cnn: Towards real-time object detection with region
proposal networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 39(6):1137–1149.
Sa, I., Ge, Z., Dayoub, F., Upcroft, B., Perez, T., and Mc-
Cool, C. (2016). Deepfruits: A fruit detection system
using deep neural networks. Sensors, 16(8).
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
ˇ
Skrjanec Marko (2013). Automatic fruit recognition using
computer vision. (Mentor: Matej Kristan), Fakulteta
za ra
ˇ
cunalni
ˇ
stvo in informatiko, Univerza v Ljubljani.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649. IEEE.
Woo Chaw Seng and Mirisaee, S. H. (2009). A new method
for fruits recognition system. In 2009 International
Conference on Electrical Engineering and Informat-
ics, volume 01, pages 130–134.
Yamamoto, K., Guo, W., Yoshioka, Y., and Ninomiya, S.
(2014). On plant detection of intact tomato fruits using
image analysis and machine learning methods. Sen-
sors, 14(7):12191–12206.
Zhang, Y., Wang, S., Ji, G., and Phillips, P. (2014).
Fruit classification using computer vision and feedfor-
ward neural network. Journal of Food Engineering,
143:167 – 177.
Zheng, L., Bie, Z., Sun, Y., Wang, J., Su, C., Wang, S., and
Tian, Q. (2016). Mars: A video benchmark for large-
scale person re-identification. In European Confer-
ence on Computer Vision, pages 868–884. Springer.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
766
