
Comparison of the Optical Flow Quality for Video Denoising
Nelson Monz
´
on
1 a
and Javier S
´
anchez
2 b
1
CMLA,
´
Ecole Normale Sup
´
erieure, Universit
´
e Paris-Saclay, France
2
CTIM, Department of Computer Science, University of Las Palmas de Gran Canaria, Spain
Keywords:
Optical Flow, Video Denoising, Motion Trajectories, Temporal Filtering.
Abstract:
Video denoising techniques need to understand the motion present in the scenes. In the literature, many
strategies guide their temporal filters according to trajectories controlled by optical flow. However, the quality
of these flows is rarely investigated. In fact, there are very few studies that compare the behavior of denoising
proposals with different optical flow algorithms. In that direction, we analyze several methods and their
performance using a general pipeline that reduces the noise through an average of the pixel’s trajectories. This
ensures that the denoising strongly depends on the optical flow. We also analyze the behavior of the methods
at occlusions and illumination changes. The pipeline incorporates a process to get rid of these effects, so that
they do not affect the comparison metrics. We are led to propose a ranking of optical flows methods depending
on their efficiency for video denoising, that mainly depends on their complexity.
1 INTRODUCTION
Video denoising (Boulanger et al., 2007; Arias and
Morel, 2018) is a key problem in image processing. It
generally requires a temporal noise filtering guided by
motion trajectories. In this regard, optical flow esti-
mation (Horn and Schunck, 1981; Lucas and Kanade,
1981) is quite useful because it provides consistent
information of the apparent displacement of the pix-
els through an image sequence. Therefore, the com-
puted solutions can be used to describe a trajectory
that guides the filtering according to the vector fields
it provides.
Several works have been published to improve
the optical flow computation in noisy images (Spies
and Scharr, 2001; Scharr and Spies, 2005), which is
one of the main challenges nowadays. Besides, the
current literature about video denoising assumes that
the motion estimation between frames is an advan-
tage (Liu and Freeman, 2010; Buades et al., 2016),
without exploring its influence in depth.
Nevertheless, in spite of research works like (Lars-
son and S
¨
oderstr
¨
om, 2015), there are not many arti-
cles that study the influence of the motion trajecto-
ries in video denoising. This is important as pointed
out in (Ehret et al., 2018), where the authors observe
the limitations of their results due to the optical flow
a
https://orcid.org/0000-0003-0571-9068
b
https://orcid.org/0000-0001-8514-4350
method. In this sense, this work compares different
algorithms and analyze their influence when used for
video denoising. The purpose is not to improve the
current denoising methods but to observe the behav-
ior of accurate motion trajectories in the final results.
We use a denoising frawework that averages the
pixel’s intensity through the trajectories obtained with
the corresponding optical flow method. The rea-
son behind this strategy is to ensure that the accu-
racy of the denoising depends basically on the vec-
tor fields. We use a centered average to reduce the
impact of possible changes in the context of a scene.
In our experiments, we compare the optical flow
methods proposed by Horn and Schunck (Horn and
Schunck, 1981), Brox et al. (Brox et al., 2004), Zach
et al. (Zach et al., 2007) and Monz
´
on et al. (Monz
´
on
et al., 2016). Arguably, an algorithm that uses tem-
poral information could be helpful to obtain consis-
tent trajectories. Thus, we also include in our exper-
iments the temporal method proposed in S
´
anchez et
al. (S
´
anchez et al., 2013) and a temporal extension of
the Brox et al. method.
2 DENOISING FRAMEWORK
Next, we briefly describe the main features of the de-
noising framework used to compare the influence of
the optical flow methods in noise reduction.
Monzón, N. and Sánchez, J.
Comparison of the Optical Flow Quality for Video Denoising.
DOI: 10.5220/0008767507170724
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020), pages 717-724
ISBN: 978-989-758-402-2
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
717

In the first step, we introduce additive white Gaus-
sian noise (AWGN), with standard deviation σ, to the
input sequence. Then, we compute the optical flows
for the whole noisy sequence in both directions. For
each image i, the neighboring frames [i − n, i + n] are
warped to the central image according to the com-
puted flows, using bicubic interpolation. The value
of n must be small in practice due to changes in
pixel intensities, occlusions or brightness changes that
worsen the denoising.
We must notice that motion and optical flow es-
timation are not equivalent goals (Verri and Poggio,
1989; Sellent et al., 2012). The physical 3D motions
do not always match with the apparent displacement
described by the optical flow in the image plane. This
is evident in many situations like occlusions, illumi-
nation changes, shadows, etc. In these cases, the true
motion is not a good choice for video denoising.
Figure 1 shows an example using the eighth frame
of the Alley1 sequence from the Sintel dataset (Butler
et al., 2012). The first row shows the central image
while the second row depicts the denoised one. The
latter has been obtained according to the trajectories
described by the ground truths. The red and green
rectangles makes zoom in some regions from the re-
sults of the first column.
Comparing both images, we observe a “halo ef-
fect” in the denoised image. This typically occurs
in occluded regions, where it is not possible to find
the corresponding pixels in all the frames. The image
mask on the the third row represents the pixels where
the color difference is higher than a given threshold.
Here, it is easy to observe the occluded regions as well
as other regions affected by other effects.
Figure 1: Alley1 and its denoised image. The first column
shows the central frame, the denoised image without dis-
carding pixels and the image mask. The second and third
columns show several details of the images at the first col-
umn. The “halo effect” appears in the occluded regions,
which are detected on the mask.
In our experimental framework, the original se-
quences are randomly disturbed by adding white
Gaussian noise (AWGN) according to a known stan-
dard deviation, σ. We discard the pixels for which
the quadratic difference between the original and the
warped images are bigger than 2 · σ
2
. In these cases,
the noisy pixels are used for the final result and the
image mask is activated in those positions as in the
last column of Fig. 1.
Figure 2 shows a diagram of the framework. The
denoised image is calculated as an average of the
color values in each pixel. Additionally, we esti-
mate an error function as the difference between the
denoised values and the pixels in the central image.
This allows us to detect pixels that suffer from oc-
clusions or brightness changes, or that are not cor-
rectly matched by the optical flow method. Finally,
we obtain the root mean square error (RMSE) and
peak signal-to-noise ratio (PSNR) between the de-
noised and the original clean image.
The video denoising framework also calculates
the RMSE
m
and PSNR
m
removing the pixels of the
mask, and the percentage of pixels (density) used in
the average. We also calculate the ratio between the
RMSE
m
and the density as RMSE
d
=
RMSE
m
density
.
3 EXPERIMENTS
We compare the performance of several optical flow
methods for video denoising and also the results
given by the ground truth motions (GT). Our exper-
iments include the algorithms published in (Monz
´
on
et al., 2016; S
´
anchez et al., 2013; S
´
anchez et al.,
2013; Meinhardt-Llopis et al., 2013) of the original
methods (Monz
´
on et al., 2016; Brox et al., 2004;
Zach et al., 2007; Horn and Schunck, 1981), respec-
tively. We shall refer to them as RDPOF, ROF, TV-
L1 and HS, respectively. The method of S
´
anchez et
al. (S
´
anchez et al., 2013) and the temporal extension
of ROF are named as TCOF and ROF
T
. The standard
datasets only provide the forward optical flows, so we
calculate the backward motions using the method pro-
posed in (S
´
anchez et al., 2015).
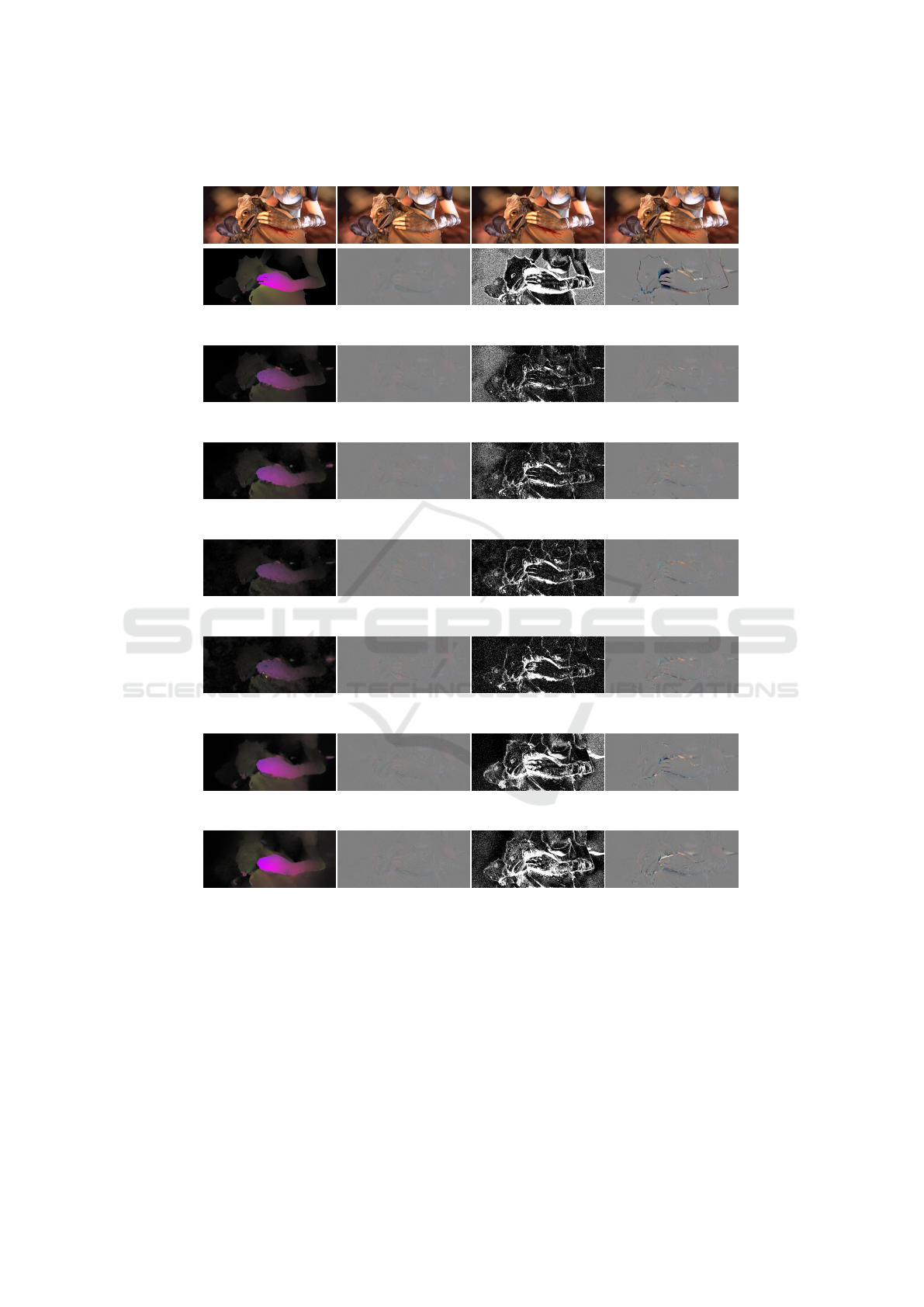
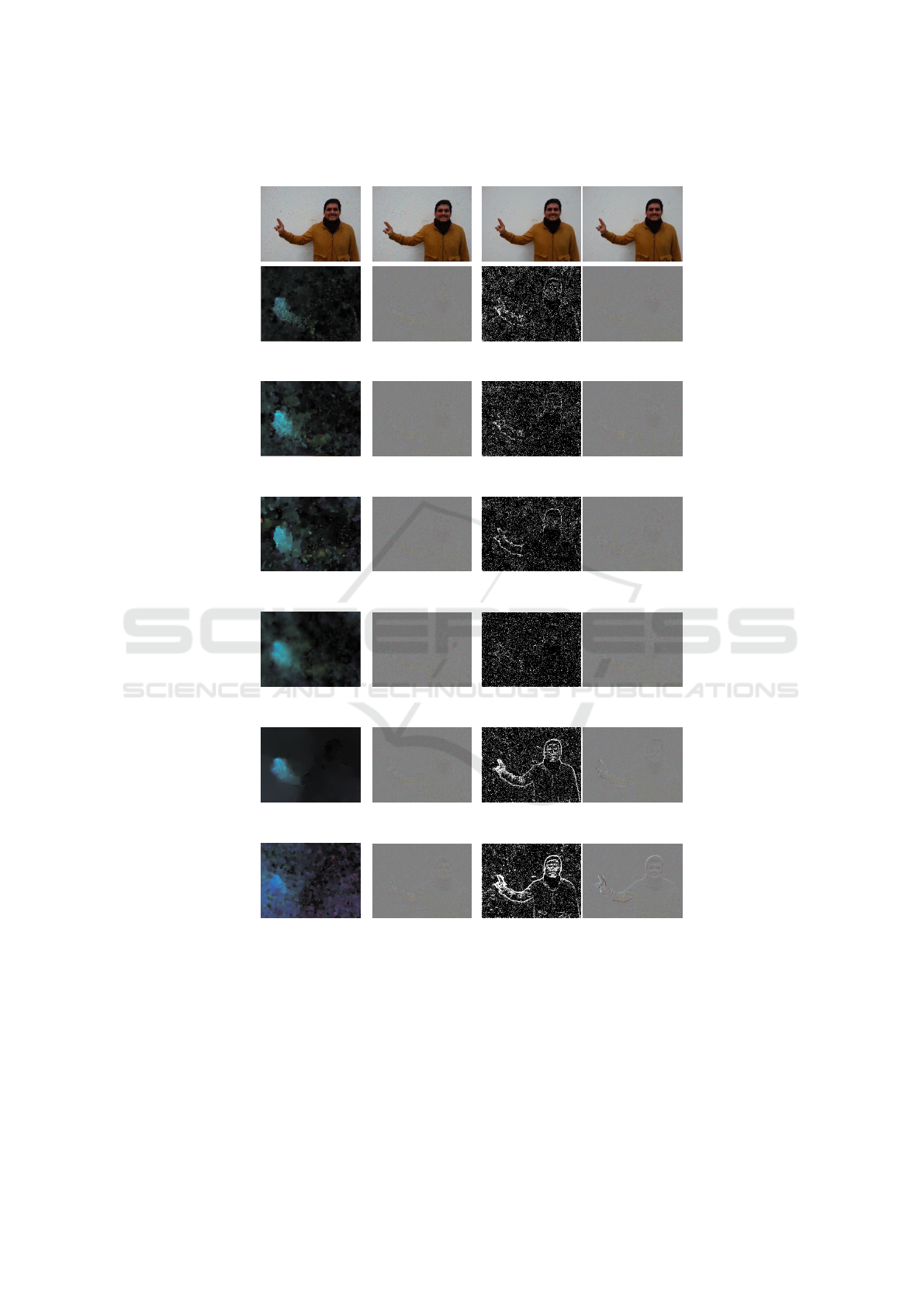
First, we compare the results for a given frame us-
ing the sequences of Alley1 (Fig. 3) and Bandage1
(Fig. 4) from the Sintel dataset. Figure 5 shows the
results from a video of a person moving his right arm.
The number of images of the sequences is 50 and the
size is 1024 × 436, while the Arm video contains 255
frames and its size is 320 × 240. The level of noise
introduced in these images is for σ = 10.
In each figure, the first row contains two consec-
utive noisy frames, the original image and the best
denoised result. The following rows show the re-
sults using the ground truth, RDPOF, ROF, TV-L1,
HS, ROF
T
and TCOF, respectively. The first col-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
718

Compute Forward
and Backward Flows
Compute the average
using the mask
Warping
the
images
according
to
the
trajectories
Figure 2: Pipeline for video denoising: First, we add white Gaussian noise (AWGN) to the image sequence; second, the
optical flow is calculated in both directions between consecutive frames; then, each image is denoised with the information of
several neighbor images; and, finally, we compute the root mean square error (RMSE) with respect to the original image. In
this figure, we illustrate an example with 2 frames in each direction.
umn depicts the calculated flow from the central to
its successive frame. The second column shows the
error image between the original and the denoised im-
ages, taking into account the occlusion mask, which is
shown in the third column. The fourth one shows the
error image without using the mask. Below the im-
ages, we show the average angular error (AAE) and
the end-point error (EPE), that are standard metrics to
measure the optical flow quality (Baker et al., 2007),
the parameters used, and the corresponding PSNR,
RMSE and density, in each case. In these experiments
we used 9 frames (n = 4).
Analyzing the results, we observe that the PSNR
m
and RMSE
m
using the masks are similar but the AAE
and EPE are very different. The RMSE difference be-
tween the ground truth and the other optical flow re-
sults is around 5%, except for the temporal methods.
This means that they are equally good for denoising
purposes.
We also notice that, interestingly, the images cal-
culated without the masks achieve good results in
spite of the fact that the vector fields are clearly differ-
ent in several methods. For instance, the flows found
for HS in Fig. 4 are evidently worse than those ob-
tained with the RDPOF and ROF methods. However,
the differences in the denoising results are not signif-
icant. The results for the ground truth are the worst
due to the halo effect produced at occlusions.
Table 1 shows the numerical results of the same
sequences but for the whole videos. The σ values are
10 and 50. It also includes the average of the runtime
required by the optical flow methods. We write in
boldface the best RMSE for each sequence.
In general, the temporal methods provide the
higher errors and require the biggest execution times,
specially TCOF. On the other hand, the results con-
firm that the best optical flows are not necessarily the
best for denoising. Furthermore, optical flow fields
that are clearly worse compared to the ground truth,
are not so different for video denoising.
In our opinion, the most desired method for de-
noising is TV-L1, although its results are not always
the best. The error differences with respect to the
other alternatives are not significant. Besides, if we
take into account the speed, this method is by far the
best choice.
4 CONCLUSION
In this work, we analyzed the influence of several op-
tical flow methods for noise reduction. Experiments
prove that optical flow is very useful but its accu-
racy is not as relevant as expected. We observed that
the methods yielding the best AAE and EPE are not
necessarily associated with the best denoising results.
This can be easily observed with the ground truth mo-
tion, where the denoised sequences are usually the
worst. Here it is important to distinguish between
optical flow and motion estimation: The motion of
real scenes generates trajectories that do not neces-
sarily preserve the intensity of the pixels along the se-
quence, while the optical flow finds correspondences
based on the similarity of the intensities. For this rea-
son, the results of such different strategies, like Horn
and Schunck or TV-L1, are very similar.
At the lights of our results, we may conclude that
the best strategy for video denoising is the TV-L1
method. This is not for the accuracy of its flow fields
in general, but for its fast running times.
Comparison of the Optical Flow Quality for Video Denoising
719

Central frame
(σ = 10)
Successive frame
(σ = 10)
Original frame Denoised frame
GT
PSNR
m
= 39.41
RMSE
m
= 2.72
Density = 73.47%
RMSE
d
= 3.71
PSNR= 31.72
RMSE= 6.60
RDPOF
AAE= 6.28, EPE= 0.47
α = 10, γ = 0
PSNR
m
= 38.76
RMSE
m
= 2.87
Density = 78.00%
RMSE
d
= 3.69
PSNR= 37.73
RMSE= 3.31
ROF
AAE= 7.68, EPE= 0.48
α = 5, γ = 1
PSNR
m
= 38.87
RMSE
m
= 2.90
Density = 76.65%
RMSE
d
= 3.67
PSNR= 37.63
RMSE= 3.34
TV-L1
AAE= 7.09, EPE= 0.45
λ = 0.3
PSNR
m
= 38.47
RMSE
m
= 2.84
Density = 78.48%
RMSE
d
= 3.62
PSNR= 37.70
RMSE= 3.32
HS
AAE= 11.00, EPE= 0.66
α = 25
PSNR
m
= 38.88
RMSE
m
= 2.89
Density = 76.17%
RMSE
d
= 3.80
PSNR= 37.03
RMSE= 3.58
ROF
T
AAE= 6.42, EPE= 0.56
α = 25, γ = 1
PSNR
m
= 39.21
RMSE
m
= 2.78
Density = 72.31%
RMSE
d
= 4.02
PSNR= 35.33
RMSE= 4.36
TCOF
AAE= 18.57,EPE= 1.11
α = 10, δ = 0.1
γ = 10, β = 0.1
PSNR
m
= 38.35
RMSE
m
= 3.08
Density = 61.59%
RMSE
d
= 5.00
PSNR= 32.46
RMSE= 6.07
Figure 3: Denoising results for the Alley1 sequence. In the first row, two images of the Alley1 sequence with Gaussian noise
of σ = 10, the original image, and the denoised result are shown. In the second row, we show the ground truth (GT) motion,
the error image between the original frame and the denoised result using the mask (third column), and the error image without
the mask. The rest of rows correspond to the results of the RDPOF, ROF, TV-L1, HS, ROF
T
and TCOF methods, respectively.
See the text for more explanations.
ACKNOWLEDGEMENTS
This work has been partly financed by Office of
Naval research grant N00014-17-1-2552, DGA Astrid
project “filmer la Terre” n
o
ANR-17-ASTR-0013-01,
DGA Defals challenge n
o
ANR-16-DEFA-0004-01.
Special thanks to Prof. Jean-Michel Morel for his
guidance and help during this research work.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
720
Central frame
(σ = 10)
Successive frame
(σ = 10)
Original frame Denoised frame
GT
PSNR
m
= 38.38
RMSE
m
= 3.07
Density = 48.55%
RMSE
d
= 6.32
PSNR= 29.50
RMSE= 8.53
RDPOF
AAE= 13.52, EPE= 0.53
α = 5, γ = 0
PSNR
m
= 38.30
RMSE
m
= 3.10
Density = 69.76%
RMSE
d
= 4.44
PSNR= 36.74
RMSE= 3.71
ROF
AAE= 15.37, EPE= 0.57
α = 5, γ = 1
PSNR
m
= 38.44
RMSE
m
= 3.04
Density = 70.23%
RMSE
d
= 4.33
PSNR= 36.74
RMSE= 3.71
TV-L1
AAE= 21.68, EPE= 0.76
λ = 0.3
PSNR
m
= 38.78
RMSE
m
= 2.95
Density = 73.35%
RMSE
d
= 4.03
PSNR= 36.50
RMSE= 3.84
HS
AAE= 26.16, EPE= 1.06
α = 10
PSNR
m
= 38.45
RMSE
m
= 3.04
Density = 73.31%
RMSE
d
= 4.15
PSNR= 36.30
RMSE= 3.90
ROF
T
AAE= 12.65, EPE= 0.52
α = 5, γ = 0
PSNR
m
= 38.85
RMSE
m
= 2.91
Density = 62.25%
RMSE
d
= 4.67
PSNR= 34.56
RMSE= 4.76
TCOF
AAE= 21.74, EPE= 0.84
α = 50, δ = 0.01
γ = 10,, β = 0
PSNR
m
= 38.73
RMSE
m
= 2.94
Density = 61.74%
RMSE
d
= 4.77
PSNR= 33.63
RMSE= 5.30
Figure 4: Denoising results for the Bandage1 sequence. In the first row, two images of the Bandage1 sequence with Gaussian
noise of σ = 10, the original image, and the denoised result are shown. In the second row, we show the ground truth (GT)
motion, the error image between the original frame and the denoised result using the mask (third column), and the error image
without the mask. The rest of rows correspond to the results of the RDPOF, ROF, TV-L1, HS, ROF
T
and TCOF methods,
respectively. See the text for more explanations.
Comparison of the Optical Flow Quality for Video Denoising
721
Central frame
(σ = 10)
Successive frame
(σ = 10)
Central frame Denoised frame
RDPOF
α = 10, γ = 5
PSNR
m
= 38.62
RMSE
m
= 2.98
Density = 76.54%
RMSE
d
= 3.90
PSNR= 38.46
RMSE= 3.04
ROF
α = 10, γ = 5
PSNR
m
= 38.90
RMSE
m
= 2.89
Density = 78.09%
RMSE
d
= 3.70
PSNR= 38.38
RMSE= 3.07
TV-L1
λ = 0.1
PSNR
m
= 38.99
RMSE
m
= 2.85
Density = 78.86%
RMSE
d
= 3.63
PSNR= 38.45
RMSE= 3.04
HS
α = 10
PSNR
m
= 38.72
RMSE
m
= 2.95
Density = 79.83%
RMSE
d
= 3.69
PSNR= 38.39
RMSE= 2.97
ROF
T
α = 25, γ = 5
PSNR
m
= 38.93
RMSE
m
= 2.88
Density = 74.57%
RMSE
d
= 3.86
PSNR= 38.25
RMSE= 3.11
TCOF
α = 10, δ = 0.001
γ = 5, β = 0
PSNR
m
= 38.96
RMSE
m
= 2.87
Density = 72.86%
RMSE
d
= 3.94
PSNR= 36.38
RMSE= 3.86
Figure 5: Denoising results for the Arm sequence. In the first row, two images of the Arm sequence with Gaussian noise of
σ = 10, the original image, and the denoised result are shown. In the second row, we show the ground truth (GT) motion, the
error image between the original frame and the denoised result using the mask (third column), and the error image without the
mask. The rest of rows correspond to the results of the RDPOF, ROF, TV-L1, HS, ROF
T
and TCOF methods, respectively.
See the text for more explanations.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
722
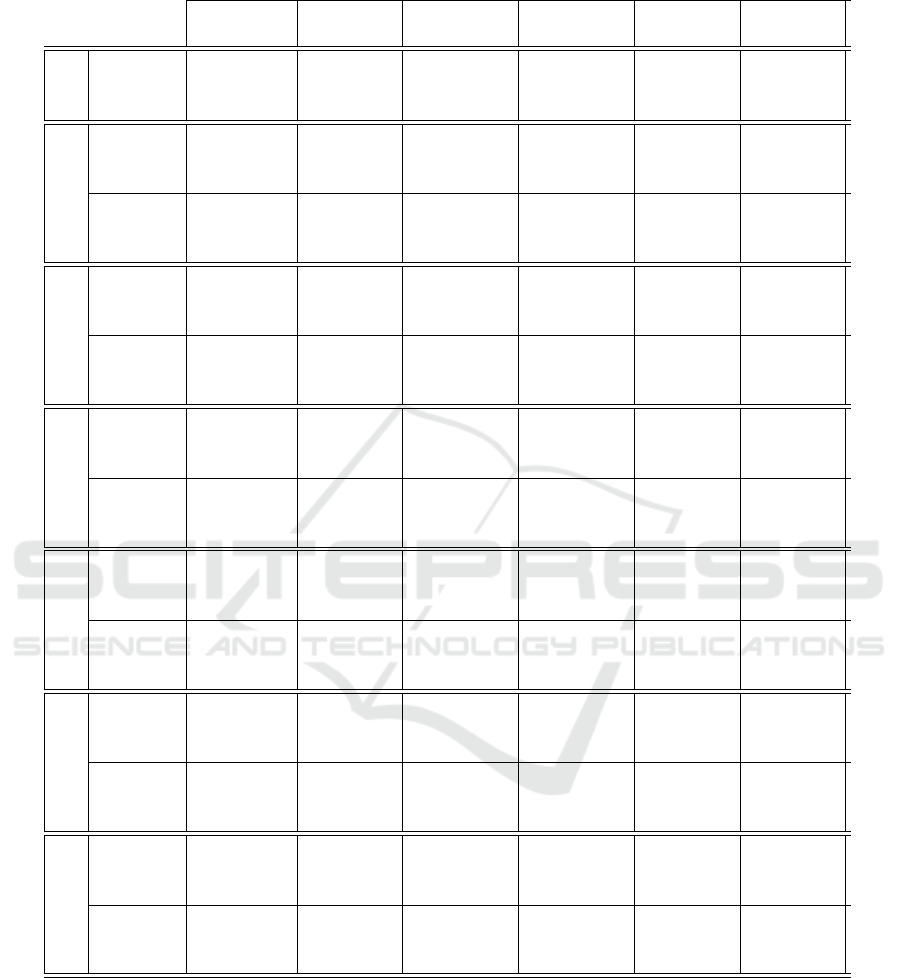
Table 1: Best AAE, EPE, average runtime to obtain the optical flows, RMSE, RMSE
m
and densities (%) found for the
complete videos of Alley1, Bandage1 and the Arm sequence. The noise values are σ = 10 and σ = 50.
Alley1
(σ = 10)
Alley1
(σ = 50)
Bandage1
(σ = 10)
Bandage1
(σ = 50)
Arm
(σ = 10)
Arm
(σ = 50)
GT
RMSE 7.60 16.07 8.53 18.50 - -
RMSE
m
2.89 14.16 3.24 15.21 - -
Densities 70.14% 81.69% 41.96% 68.10% - -
RDPOF
AAE 7.82
o
14.23
o
15.80
o
29.48
o
- -
EPE 0.61 1.11 1.23 1.89 - -
Time 3.6(s) 3.85(s) 3.57(s) 3.87(s) 0.6(s) 0.8(s)
RMSE 3.73 15.25 4.15 15.09 3.13 14.12
RMSE
m
3.05 14.77 3.26 14.69 3.00 13.85
Densities 77.37% 83.89% 65.91% 84.08% 76.31% 83.51%
ROF
AAE 7.51
o
10.76
o
16.01
o
26.68
o
- -
EPE 0.60 0.94 1.20 1.64 - -
Time 5.43(s) 6.39(s) 5.67(s) 6.39(s) 1.6(s) 2(s)
RMSE 3.77 14.80 4.34 14.96 3.11 13.93
RMSE
m
3.02 14.30 3.21 14.53 2.91 13.81
Densities 76.65% 83.75% 64.52% 83.50% 77.15% 84.81%
TV-L1
AAE 7.02
o
14.48
o
21.69
o
28.64
o
- -
EPE 0.58 0.99 2.11 1.69 - -
Time 2(s) 2.6(s) 2(s) 2.2(s) 0.25(s) 0.21(s)
RMSE 3.87 14.78 4.44 14.94 3.09 13.77
RMSE
m
2.96 14.37 3.11 14.48 2.88 13.72
Densities 75.67% 84.12% 69.27% 83.58% 78.16% 84.91%
HS
AAE 9.91
o
21.12
o
22.15
o
33.53
o
- -
EPE 0.75 1.31 1.43 2.04 - -
Time 4.8(s) 6.5(s) 6.51(s) 4.83(s) 5.35(s) 5.86(s)
RMSE 4.26 14.98 4.84 15.23 3.07 13.98
RMSE
m
3.00 14.53 3.16 14.70 2.96 13.76
Densities 73.97% 84.10% 68.14% 83.38% 79.83% 84.62%
ROF
T
AAE 6.81
o
12.11
o
15.87
o
26.41
o
- -
EPE 0.64 0.94 1.41 1.77 - -
Time 6.9(s) 7.47(s) 7.32(s) 7.68(s) 1.23(s) 1.82(s)
RMSE 5.33 15.1 6.58 15.72 3.39 14.02
RMSE
m
2.91 14.43 3.14 14.72 2.91 13.71
Densities 70.40% 83.31% 52.41% 81.27% 75.26% 83.28%
TCOF
AAE 19.80
o
24.33
o
27.62
o
30.45
o
- -
EPE 1.26 1.72 2.25 2.83 - -
Time 88.52(s) 75.52(s) 79.18(s) 52.12(s) 14.27(s) 10.18(s)
RMSE 5.75 15.95 8.55 16.60 3.55 14.28
RMSE
m
3.18 15.01 3.05 15.24 2.88 13.90
Densities 65.06% 82.39% 45.75% 79.83% 74.19% 83.87%
REFERENCES
Arias, P. and Morel, J.-M. (2018). Video denois-
ing via empirical bayesian estimation of space-time
patches. Journal of Mathematical Imaging and Vision,
60(1):70–93.
Baker, S., Scharstein, D., Lewis, J., Roth, S., Black, M.,
and Szeliski, R. (2007). A database and evaluation
methodology for optical flow. In International Con-
ference on Computer Vision (ICCV 2007).
Boulanger, J., Kervrann, C., and Bouthemy, P. (2007).
Space-time adaptation for patch-based image se-
quence restoration. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 29(6):1096–1102.
Brox, T., Bruhn, A., Papenberg, N., and Weickert, J. (2004).
High accuracy optical flow estimation based on a the-
Comparison of the Optical Flow Quality for Video Denoising
723

ory for warping. In Pajdla, T. and Matas, J., editors,
European Conference on Computer Vision (ECCV),
volume 3024 of LNCS, pages 25–36, Prague, Czech
Republic. Springer.
Buades, A., Lisani, J., and Miladinovi
´
c, M. (2016). Patch-
based video denoising with optical flow estimation.
IEEE Transactions on Image Processing, 25(6):2573–
2586.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for optical
flow evaluation. In A. Fitzgibbon et al. (Eds.), editor,
European Conf. on Computer Vision (ECCV), Part IV,
LNCS 7577, pages 611–625. Springer-Verlag.
Ehret, T., Morel, J., and Arias, P. (2018). Non-local kalman:
A recursive video denoising algorithm. In 2018 25th
IEEE International Conference on Image Processing
(ICIP), pages 3204–3208.
Horn, B. and Schunck, B. (1981). Determining optical flow.
MIT Artificial Intelligence Laboratory, 17:185–203.
Larsson, M. and S
¨
oderstr
¨
om, L. (2015). Analysis of optical
flow algorithms for denoising. Student Paper.
Liu, C. and Freeman, W. T. (2010). A high-quality video
denoising algorithm based on reliable motion estima-
tion. In Daniilidis, K., Maragos, P., and Paragios, N.,
editors, Computer Vision – ECCV 2010, pages 706–
719, Berlin, Heidelberg. Springer Berlin Heidelberg.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th international joint
conference on Artificial intelligence - Volume 2, pages
674–679, San Francisco, CA, USA. Morgan Kauf-
mann Publishers Inc.
Meinhardt-Llopis, E., S
´
anchez, J., and Kondermann, D.
(2013). Horn-Schunck Optical Flow with a Multi-
Scale Strategy. Image Processing On Line, 3:151–
172.
Monz
´
on, N., Salgado, A., and S
´
anchez, J. (2016). Regular-
ization strategies for discontinuity-preserving optical
flow methods. IEEE Transactions on Image Process-
ing, 25(4):1580–1591.
Monz
´
on, N., Salgado, A., and S
´
anchez, J. (2016). Robust
Discontinuity Preserving Optical Flow Methods. Im-
age Processing On Line, 6:165–182.
S
´
anchez, J., Meinhardt-Llopis, E., and Facciolo, G. (2013).
TV-L1 Optical Flow Estimation. Image Processing
On Line, 3:137–150.
S
´
anchez, J., Monz
´
on, N., and Salgado, A. (2013). Ro-
bust optical flow estimation. Image Processing
On Line, 2013:252–270. http://dx.doi.org/10.
5201/ipol.2013.21.
S
´
anchez, J., Salgado, A., and Monz
´
on, N. (2013). Op-
tical flow estimation with consistent spatio-temporal
coherence models. In International Conference on
Computer Vision Theory and Applications (VISAPP),
pages 366–370. Institute for Systems and Technolo-
gies of Information, Control and Communication.
S
´
anchez, J., Salgado, A., and Monz
´
on, N. (2015). Comput-
ing inverse optical flow. Pattern Recognition Letters,
52:32 – 39.
Scharr, H. and Spies, H. (2005). Accurate optical flow in
noisy image sequences using flow adapted anisotropic
diffusion. Sig. Proc.: Image Comm., 20:537–553.
Sellent, A., Kondermann, D., Simon, S. J., Baker, S.,
Dedeoglu, G., Erdler, O., Parsonage, P., Unger, C.,
and Niehsen, W. (2012). Optical flow estimation ver-
sus motion estimation.
Spies, H. and Scharr, H. (2001). Accurate optical flow in
noisy image sequences. In Proceedings Eighth IEEE
International Conference on Computer Vision. ICCV
2001, volume 1, pages 587–592 vol.1.
Verri, A. and Poggio, T. A. (1989). Motion field and opti-
cal flow: Qualitative properties. IEEE Trans. Pattern
Anal. Mach. Intell., 11:490–498.
Zach, C., Pock, T., and Bischof, H. (2007). A Duality
Based Approach for Realtime TV-L1 Optical Flow.
In Hamprecht, F. A., Schn
¨
orr, C., and J
¨
ahne, B., ed-
itors, Pattern Recognition, volume 4713 of Lecture
Notes in Computer Science, chapter 22, pages 214–
223. Springer Berlin Heidelberg, Berlin, Heidelberg.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
724
