
Learning Spatial Relations with a Standard Convolutional Neural
Network
Kevin Swingler
a
and Mandy Bath
Computing Science and Mathematics, University of Stirling, Stirling, FK9 4LA, Scotland
Keywords:
Convolutional Neural Networks, Spatial Reasoning, Computer Vision.
Abstract:
This paper shows how a standard convolutional neural network (CNN) without recurrent connections is able to
learn general spatial relationships between different objects in an image. A dataset was constructed by placing
objects from the Fashion-MNIST dataset onto a larger canvas in various relational locations (for example,
trousers left of a shirt, both above a bag). CNNs were trained to name the objects and their spatial relationship.
Models were trained to perform two different types of task. The first was to name the objects and their
relationships and the second was to answer relational questions such as “Where is the shoe in relation to
the bag?”. The models performed at above 80% accuracy on test data. The models were also capable of
generalising to spatial combinations that had been intentionally excluded from the training data.
1 INTRODUCTION
The ability to understand the relationships between
objects in an image is an important step towards a
complete solution to computer vision. Objects can
have many types of relationship, such as subject-
object or relative location. This paper describes work
aimed at allowing neural networks to learn about the
spatial relationships between pairs of objects in an im-
age and report both image labels and relationship la-
bels, for example “The bag is above the coat”. This
work is part of a project that aims to use computer vi-
sion to build assistive technology for the blind. The
project is called the Artificial Intelligence Sight Loss
Assistant (AISLA)
1
and this work contributes to a
module designed to process simple questions about
the locations of objects in a room.
Convolutional Neural Networks (CNNs) have
proven to be very successful in recent years at a num-
ber of signal processing tasks including computer vi-
sion. Early CNNs were designed to classify a whole
image and so were only able to process a single object
at a time. Work on improving these algorithms con-
tinues. Examples include LeNet (LeCun et al., 1998),
AlexNet (Krizhevsky et al., 2012), VGG (Simonyan
and Zisserman, 2014), the Inception models (Szegedy
et al., 2015), (Szegedy et al., 2016), ResNet (He et al.,
2016), and ResNeXt (Xie et al., 2017). At the same
a
https://orcid.org/0000-0002-4517-9433
1
https://www.aisla.org.uk/
time, a number of large image collections have been
published with data identifying the objects in the im-
ages and their locations. Examples include the COCO
dataset (Lin et al., 2014), the Fashion-MNIST dataset
(Xiao et al., 2017) and the ImageNet database (Deng
et al., 2009).
The same convolutional idea is also applied to the
dual task of locating and labelling more than one ob-
ject in an image. This is collectively known as object
detection and well known object detection models in-
clude R-CNN (Girshick et al., 2014), Faster R-CNN
(Ren et al., 2015), and the series of YOLO models
(Redmon and Farhadi, 2017), (Redmon and Farhadi,
2018). Object detectors generate a list of object la-
bels and associated bounding boxes, locating them in
the image. Given the bounding boxes in an image,
some simple geometric calculations can be used to
test the relative positions of objects to each other in
the flat plane of the image. However, it is an inter-
esting question as to whether a CNN, with its focus
on local features, is capable of learning larger scale
spatial relationships among the objects in an image.
Some work has been carried out that attempts to
describe spatial relationships in images. Automated
image captioning uses a mixture of natural language
processing and computer vision to associate an im-
age with a descriptive sentence such as “A man walk-
ing on a beach with a dog”. Some of the descriptions
contain spatial relationships - “A vase on a table” for
example, but as the words are generated statistically,
464
Swingler, K. and Bath, M.
Learning Spatial Relations with a Standard Convolutional Neural Network.
DOI: 10.5220/0010170204640470
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 464-470
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the spatial meaning is lost. Many of these models mix
CNNs with LSTMs to process the series of words that
make up a caption, see (Wang et al., 2016) for exam-
ple. Hossain et al. (Hossain et al., 2019) provide a
useful review of image captioning techniques.
In 2014, in his talk on what is wrong with con-
volutional neural nets, Geoff Hinton talked about the
limitations of max pooling and how CNNs can recog-
nise the right elements, but in the wrong order. For
example, it might detect two eyes, a nose and a mouth
and classify a face even if those elements are not ar-
ranged as a face. We were interested in whether or not
a CNN could be made to learn such spatial relation-
ships if the target outputs made them explicit. This is
slightly different from the point that Hinton was mak-
ing, but sparked the question all the same. Can a CNN
learn image wide spatial relationships by simply en-
coding the name of such relationships at the output
layer?
There have been several attempts at explicitly ad-
dressing the challenge of learning spatial relation-
ships among objects in an image using an architec-
ture that adds spatial specific elements to the standard
CNN. Mao et al. (Mao et al., 2014) use a mixture of
recurrent network layers and convolutional layers in a
multimodal approach they call an m-CNN. The model
uses a statistical approach to produce words that form
sentences that describe images. Words are selected
from a probability model based on the image and the
previous words in the sentence.
More recently, Raposo et al. (Raposo et al., 2017)
proposed relation networks (RN) as a way of allow-
ing networks to learn about the relationships between
objects in a scene. The RN models the relationships
between pairs of objects and is used in conjunction
with CNNs and LSTMs for image and language pro-
cessing.
In this paper, we address the question of whether a
simple CNN architecture without recurrent or LSTM
components is able to learn relative spatial relation-
ships in images. The important question is whether
or not a CNN can learn to generalise concepts such
as above or below from example images without an
architecture that is specifically designed to capture
those relationships. This was done by generating im-
ages with a small number of object classes arranged
in a variety of spatial configurations while ensuring
that some combinations did not appear in the training
data. When tested, the model was able to correctly re-
port the relative locations of object combinations that
were absent from the training data.
The motivation for the work is to add specific out-
put nodes to a CNN, which refer to a defined concept.
In this case, the concepts describe relative locations,
but in future work they might describe an action or
even an intention. Rather than generating a sentence
(such as the girl is drinking the milk) that requires
further post-processing to extract meaning, we aim
to generate meaningful outputs directly from the im-
age (object=girl, subject=milk, verb=drink, for exam-
ple). We want to be able to use a single architecture (a
standard CNN) and change only the output targets to
be able to train on different meaningful relationships
among objects in an image.
The remainder of this paper is organised as fol-
lows. Section 2 describes the preparation of the train-
ing, validation and test data. Sections 3 and 4 de-
scribe two experiments with CNNs for spatial relation
recognition. Finally, section 5 provides an analysis of
the results and some ideas for further work.
2 DATA PREPARATION
The datasets for the experiments were constructed us-
ing the Fashion-MNIST dataset (Xiao et al., 2017).
Images in this collection are 28 by 28 pixels in size
and they were used to generate larger images of 56 by
56 pixels by pasting two or three of the original im-
ages onto a larger canvas. The original images were
selected at random without replacement and placed on
the larger canvas in randomly chosen non-overlapping
locations. In this way, any two objects in an image
could have a clearly defined spatial relationship from
the set {above, below, left, right, above left, below
left, above right, below right}. The data was auto-
matically labelled using the algorithm that generated
it, making the process of producing large quantities
of data very efficient. Figure 1 shows two example
images. Note that the Fashion-MNIST images are 28
by 28 pixels, so the figures in this paper represent the
quality of those images accurately.
The Fashion-MNIST object classes are: T-
shirt/top, Trouser, Pullover, Dress, Coat, Sandal,
Shirt, Sneaker, Bag, Ankle boot. There are 60,000
training images and 10,000 test images in the dataset.
All of the images are provided in grey scale so they
do not have a colour dimension.
The training/validation/test protocol was as fol-
lows. The original MNIST training data were split
into 20% test data and 80% training data before the
composite images were generated. The 80% used for
training were further split into 80% train and 20% val-
idation sets, all before the composite images were cre-
ated. Consequently, the train, validation and test data
share no original images in common. What is more,
on different training runs, certain combinations of ob-
ject class and spatial relationship (shirt above bag,
Learning Spatial Relations with a Standard Convolutional Neural Network
465
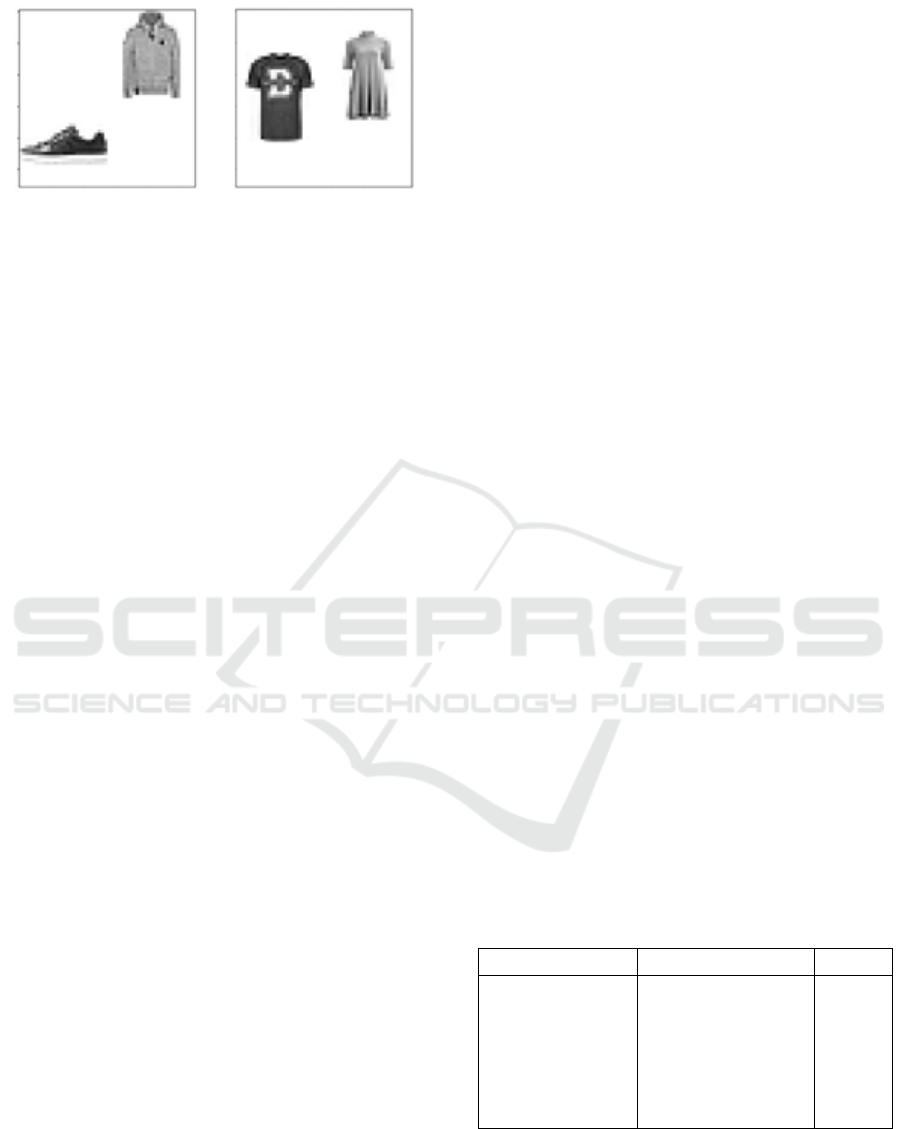
Figure 1: Two example training images. The first showing
a sneaker below left of a pullover and the other showing a
t-shirt below left of a dress. The categories were defined so
that objects were either perfectly aligned, meaning that one
is to the left of the other, or offset vertically meaning one is
below left or below right the other.
for example) were actively excluded to ensure that
the validation and test data contained novel combi-
nations. In total there were 48,000 training examples,
12,000 validation examples and 10,000 test examples
created. The validation data were used to tune the hy-
perparameters of the CNN and the test data were used
to report the final accuracy values.
Two different experiments were performed, each
on a different variant of the spatial relationship la-
belling task. The first trains a model to produce the
class names of two objects in an image along with the
name of the spatial relationship between them. The
second takes an image with three objects in it along
with the names of two of them and produces the name
of the relationship between the two named objects as
output. The experiments are described in the next two
sections.
3 EXPERIMENT ONE - TWO
OBJECTS
This section describes the first experiment, in which
a CNN is trained to describe an image containing two
objects. The images in the training data each contain
two objects from the fashion MNIST data set and the
target output for each consists of the two labels plus
the name of the spatial relationship between them.
Each image forms the input part of a training point
and the output is a vector of 24 binary values. The first
10 form a one-hot encoding of the name of the first
object in the image. The second 10 use the same rep-
resentation for the second object in the image and the
final four represent the four possible spatial relation-
ships of the first object to the second. They are in the
set {left, above, below left, and below right}. There
is no need to encode the relationships to the right of
or below as they can be represented by switching the
order of the object labels. For example, a coat to the
left of a bag would encode coat, bag, left and a coat to
the right of a bag would encode bag, coat, left. Con-
sequently, each output vector contains exactly three
values set to one and the rest at zero.
3.1 Network Architecture
A convolutional neural network architecture was used
as follows. The input layer takes grey level images of
56 by 56 pixels, so has a volume of 56×56×1. There
are then three convolutional layers, the size of which
is explored as one of the architectural hyperparame-
ters. Each one of the three layers uses batch normali-
sation, max pooling and dropout, all optimised during
the training and validation process. All layers except
the output layer use ReLU activation functions as this
is well established in the literature as a good choice
for speed and stability.
There is then a fully connected layer that is itself
fully connected to the final, output layer, which uses
logistic activation functions paired with a cross en-
tropy loss function. Softmax activation here would
not be suitable as there are always three nodes with a
target value of one, and softmax forces all the outputs
to sum to one.
During training, the hyperparameters were tuned
using a mixture of manual and hyperband search (Li
et al., 2017). The hyperparameters, their possible
settings and search method are shown in Table 1.
The manual search involved the researcher making a
judgement about how to set the hyperparameter based
on previously built models from the same set of ex-
periments. It is fair to say that the model was not
fully optimised, but the purpose of the work is to test
whether or not a CNN can learn spatial relationships
rather than squeezing the last percentage of accuracy
from the data.
Table 1: The hyperparameter search space for the convo-
lutional neural network. In the Search column, H means
hyperband and M means manual.
Hyperparameter Options Search
Number of filters 32, 64, 128 H
Kernel size 3 × 3, 5 × 5, 11× 11 M
Optimiser Adam, SGD H
Learning rate 0.01, 0.001, 0.0001 M
LR Decay Yes, No M
Batch size 1, 32, 64, full M
Dropout 0.2, 0.3, 0.4, 0.5 M
During training, early stopping was used if the val-
idation accuracy stopped falling. The first two convo-
lutional layers used small kernels, as is common in
the literature, but for the third layer we experimented
with larger kernels to allow the network to capture
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
466
broader spatial relationships. Peng et al. (Peng et al.,
2017) describe the advantages of larger kernels when
performing object localisation. Learning rates started
at the values stated in Table 1, but learning rate decay
was also found to be advantageous.
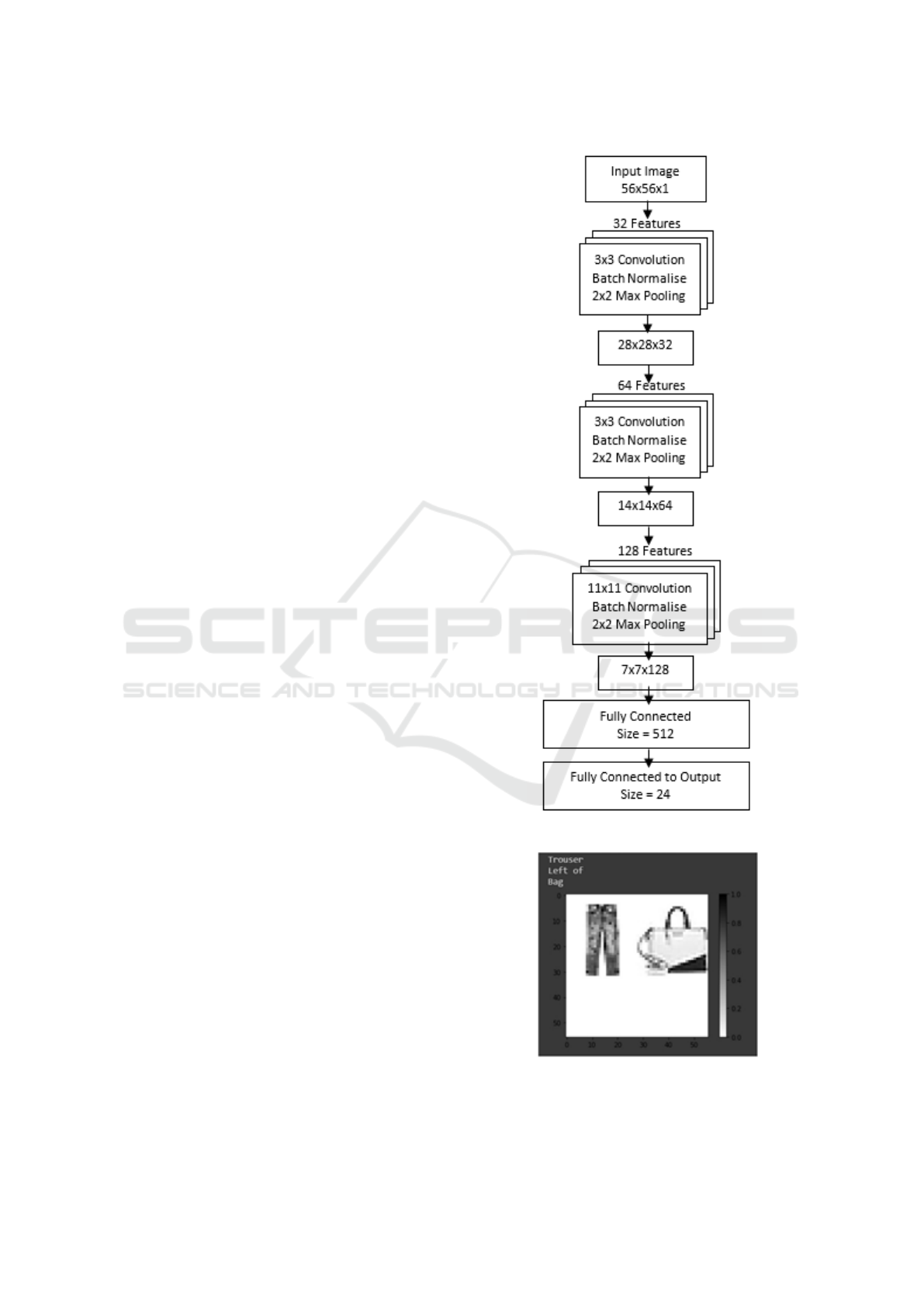
3.2 Hyperparameter Search Results
The results of the hyperparameter search were a
model with the architecture shown in Figure 2. The
model was trained for 162 epochs before early stop-
ping. The optimal hyperparameters were found to be
a learning rate of 0.001 with learning rate decay on
each epoch. The optimal batch size was found to be
32 and the dropout rate was 0.3. ReLU activation
functions were used throughout except at the output
layer, where logistic functions were used. Adam was
found to be more effective than stochastic gradient de-
scent (SGD) as the optimiser.
It was found that using smaller kernels at the final
convolutional layer adversely affected the accuracy of
the model, suggesting that the larger kernel is needed
to capture positional relationships. This is not a sur-
prising finding as these relationships naturally occur
over large distances. Being at later layers, the larger
kernels are able to operate on smaller input volumes
than the full input image while still spanning the full
scope of the original image. This is because the archi-
tecture of the network shrinks the input size at each
layer with max pooling so a single cell in layer three
covers the information in 4 pixels of the original im-
age.
3.3 Results
After 162 training epochs, early stopping caused the
process to terminate. The training accuracy was 0.93
and the test accuracy was 0.83. The specific combi-
nation of the objects bag and trousers were excluded
from the training data but included in the test data.
The test data images containing a bag and a pair of
trousers were then used to test the model’s ability to
generalise to combinations of object and location that
were not in the training data. The model was able to
correctly give the object labels and relative locations
for these images. An example image is shown in Fig-
ure 3.
4 EXPERIMENT TWO - THREE
OBJECTS
In the first experiment described above, the task for
the CNN was to name the classes for two objects in
Figure 2: The architecture of the relationship detector CNN.
Figure 3: An example output from the model showing the
correct response to an image containing a pair of trousers to
the left of a bag. This was a combination of objects that was
explicitly excluded from the training data.
Learning Spatial Relations with a Standard Convolutional Neural Network
467
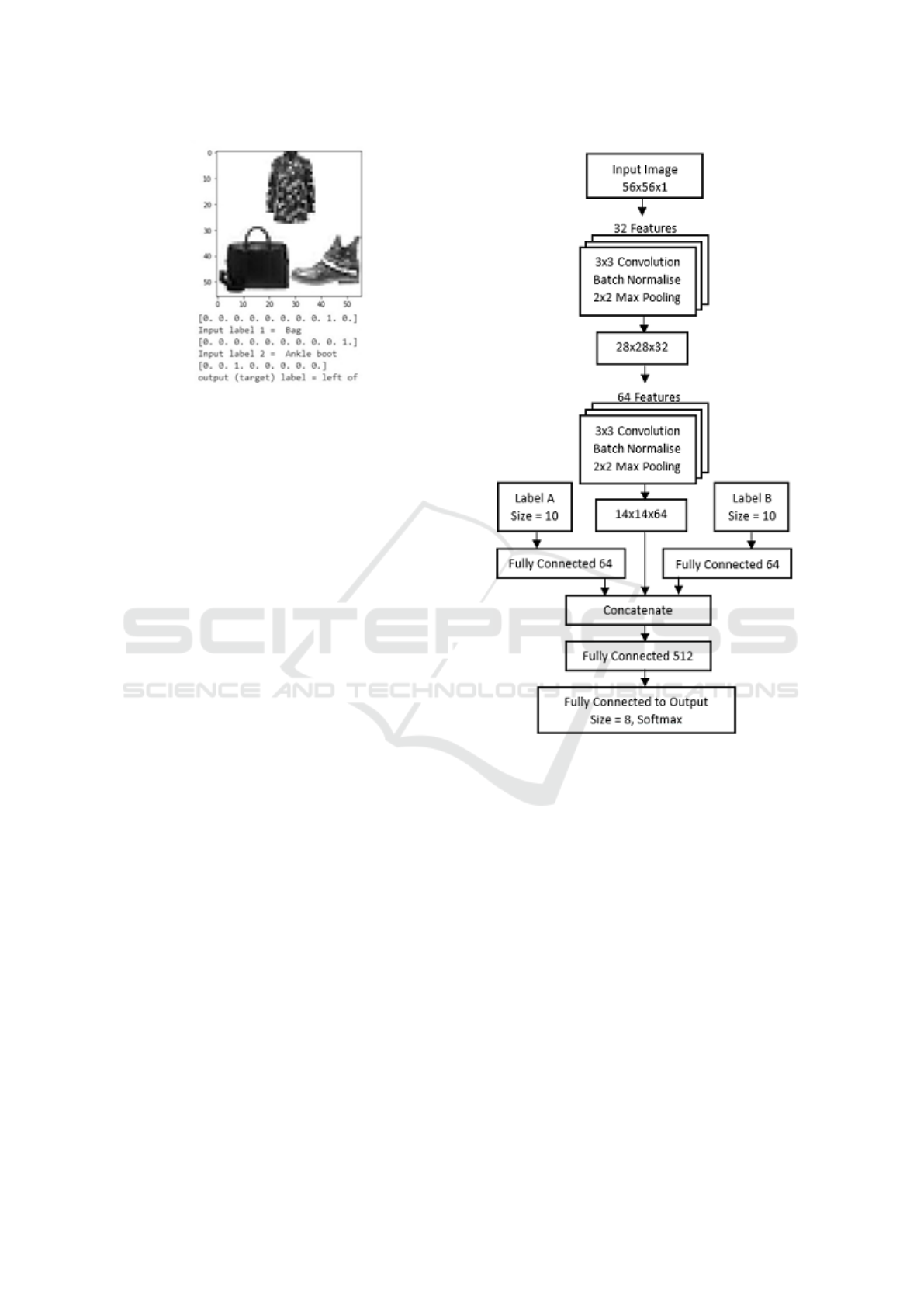
Figure 4: An example input and output encoding. In this
example, the relationship ”bag left of ankle boot” is repre-
sented.
an image and label the spatial relationship between
them. In the second experiment, the task is to take an
image containing three objects, along with the labels
for two of them as an input and generate the nature of
the relationship between them as the output. This is
equivalent to answering a question like ”Where is the
coat in relation to the bag?”. It presupposes that you
know the identity of two of the objects in the image.
However, the presence of a third object in the image
means that this is not simply a question of identify-
ing where the objects are. The network must identify
which are the two objects of interest and then gener-
ate the relationship between them. Figure 4 shows an
example input image.
The data representation for this task consists of the
image as a 56×56 array of grey level pixel values plus
two vectors of ten, each with a one-hot encoding of
the object class to include in the question. We do not
attempt to process whole sentences, such as ”What is
to the left of the bag?”, but encode the question ex-
plicitly as two words and an image. The output rep-
resents the 8 possible relationships of the second ob-
ject to the first from the set {above, below, left, right,
below left, below right, above left, above right}. As
with the inputs, we are not trying to generate full sen-
tences, just the answer to the encoded question. Of
course, it is trivial, given the two input object labels
and the name of their relationship to generate a mean-
ingful sentence from the output.
Training images were generated by placing three
random images from the Fashion-MNIST training
data in non-overlapping locations on a 56 × 56 pixel
blank canvas. Two of the objects were selected at ran-
dom and their spatial relationship calculated and en-
coded as the target output. Note that each training im-
age represents only one of the possible relationships
it contains. In figure, 4, for example, the coat object
Figure 5: The architecture of the three object CNN.
is not represented in the output.
The architecture for the model has three channels
that merge in the first fully connected layer. One uses
the standard CNN components of convolutions, max
pooling, ReLU, and batch normalisation. The other
two channels simply feed the one-hot encoded rep-
resentations of the question words into the first fully
connected layer. This layer then merges the three
channels into a final, fully connected layer to a one-
hot encoded softmax layer that represents the target
relationship label at the output. The architecture is
shown in Figure 5.
4.1 Results
After a hyperparameter search following the protocol
described in section 3.1, a network with the architec-
ture shown in Figure 5 was trained until early stop-
ping at 100 epochs. The learning rate was initially
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
468

Figure 6: The model correctly labelling a bag above the
trousers. The training data contained no examples of this
combination.
0.001 and rate decay was used to decrease it further
after each epoch. Convolutional layers had ReLU ac-
tivation functions and the output was softmax. The
dropout rate was 0.3 and Adam was used for the opti-
miser. Categorical cross entropy was used for the cost
function.
The final model achieved an accuracy of 94% on
the training data and 86% on the unseen test data. As
before, images containing a bag and a pair of trousers
were missing from the training data, but were explic-
itly included for testing. Figure 6 shows an example
of the model correctly generalising to generate an an-
swer to the question “Where is the bag in relation to
the trousers?”.
5 CONCLUSION
This short piece of work shows that a standard convo-
lutional neural network is capable of learning image-
wide concepts about the relative locations of objects
in an image. The architecture of the CNN uses a com-
bination of max pooling layers that shrink the input
dimensions at each step and a large kernel at the final
layer. This allows broad scale relationships across the
original image to be captured in smaller feature maps.
We speculate that the large kernel at the final convolu-
tional layer of the network is responsible for learning
the relative locations. There is evidence for this in the
fact that reducing the size of the final kernels reduces
the ability of the network to correctly label relative
locations of objects in an image.
The second of the two experiments shows that a
very simple form of visual question and answering
can be implemented with a standard CNN by encod-
ing the question at the inputs and the correct answer
at the outputs. The input encodes both the image and
the question, which specifies which elements of the
image should be used to generate the answer. So the
question “Here is a picture that contains a bag, a coat
and a shoe, but where is the shoe in relation to the
bag?” can be answered with a one-of-eight encoding
of relative locations.
There is plenty of scope to extend this work.
Larger images with more objects could be introduced
and the images could be placed on a noisy background
rather than a plain white one. Real images could
also be used. For example, the well known COCO
dataset (Lin et al., 2014) has object labels and bound-
ing boxes in its annotations. The relative locations of
objects could be roughly inferred from the bounding
box coordinates. Other relationships types could also
be introduced, for example “on” as in “the lamp is on
the desk” or “in front” or “behind”.
The primary application that motivates this work
is the development of a personal assistant technology
for people with sight loss. Fixed cameras in a home
could be used to answer location based questions such
as “where did I leave my radio?” or to warn a user
about a potential obstacle or danger. Other appli-
cations that require a specific representation of rela-
tive locations include self-driving cars and warehouse
picking robots.
The difference between this approach, where spe-
cific relationships are one-hot encoded as specific
nodes, and the sentence generating approaches de-
scribed in section 1 is that the relationship is made
explicit in the representation. With the three labels:
“Coat”, “Left”, “Bag”, one can easily generate a cap-
tion: “The coat is to the left of the bag” but one can
also answer other questions such as “What is to the
left of the bag?” or “Where is the coat?” without the
need to use natural language understanding to decode
an automatically generated caption. The facts of the
image are made explicit.
REFERENCES
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Learning Spatial Relations with a Standard Convolutional Neural Network
469

Hossain, M. Z., Sohel, F., Shiratuddin, M. F., and Laga, H.
(2019). A comprehensive survey of deep learning for
image captioning. ACM Computing Surveys (CSUR),
51(6):1–36.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Li, L., Jamieson, K., DeSalvo, G., Rostamizadeh, A., and
Talwalkar, A. (2017). Hyperband: A novel bandit-
based approach to hyperparameter optimization. The
Journal of Machine Learning Research, 18(1):6765–
6816.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Mao, J., Xu, W., Yang, Y., Wang, J., and Yuille, A. L.
(2014). Explain images with multimodal recurrent
neural networks. arXiv preprint arXiv:1410.1090.
Peng, C., Zhang, X., Yu, G., Luo, G., and Sun, J. (2017).
Large kernel matters–improve semantic segmentation
by global convolutional network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 4353–4361.
Raposo, D., Santoro, A., Barrett, D., Pascanu, R., Lillicrap,
T., and Battaglia, P. (2017). Discovering objects and
their relations from entangled scene representations.
arXiv preprint arXiv:1702.05068.
Redmon, J. and Farhadi, A. (2017). Yolo9000: better, faster,
stronger. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 7263–
7271.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Wang, C., Yang, H., Bartz, C., and Meinel, C. (2016). Im-
age captioning with deep bidirectional LSTMs. In
Proceedings of the 24th ACM international confer-
ence on Multimedia, pages 988–997.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
MNIST: a novel image dataset for benchmark-
ing machine learning algorithms. arXiv preprint
arXiv:1708.07747.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
470
