Geographic Feature Engineering with Points-of-Interest from
OpenStreetMap
Adelson de Araujo, Jo
˜
ao Marcos do Valle and N
´
elio Cacho
Digital Metropolis Institute, Federal University of Rio Grande do Norte, Natal, Brazil
Keywords:
Points-of-Interest, Geographic Features, OpenStreetMap, Feature Engineering.
Abstract:
Although geographic patterns have been considered in statistical modelling for many years, new volunteered
geographical information is opening opportunities for estimating variables of the city using the urban char-
acteristics of places. Studies have shown the effectiveness of using Points-of-Interest (PoI) data in various
predictive applications domains involving geographic data science, e.g. crime hot spots, air quality and land
usage analysis. However, it is hard to find the data sources mentioned in these studies and which are the
best practices of extracting useful covariates from them. In this study, we propose the Geohunter, a repro-
ducible geographic feature engineering procedure that relies on OpenStreetMap, with a software interface to
commonly used tools for geographic data analysis. We also analysed two feature engineering procedures,
the quadrat method and KDE in which we conduct a qualitative and quantitative evaluation to suggest which
better translate geographic patterns of the city. Further, we provide some illustrative examples of Geohunter
applications.
1 INTRODUCTION
There is a growing demand for measurement and
monitoring of landscape-level patterns and processes
(Gustafson, 1998), and modern sources of data are
becoming useful for predictive analysis. Although
geographic patterns have been considered in statisti-
cal modelling for many years, new volunteered geo-
graphical information is opening opportunities for es-
timating variables of the city using the urban charac-
teristics of places. For example, when it is asked for
some inference on crime concentration within the ur-
ban space, it may be reasonable to argue that street
network may be an important predictor (Davies and
Johnson, 2015), as well as estimating air quality lev-
els where the presence of natural spaces within the
city may be useful. In this paper we detail a method-
ology to extract such covariates by using an Open-
StreetMap interface and compare two methods to de-
compose city data into layers of information. Our
goal is to represent the city into densities of points-
of-interest, as Figure 1 depicts.
Supported by volunteered geographical infor-
mation and data from points-of-interest (PoI), re-
searchers in many fields continue to investigate the as-
sociation between geographical patterns and the stud-
ied domain. For example, spatiotemporal crime pre-
Figure 1: Geographic features as city layers.
diction (Lin et al., 2018), energy retail (Hopf, 2018),
land usage (Estima and Painho, 2013) and several oth-
ers. With a variety of methods for representing such
patterns, researchers extract the density of PoI within
city-regions. For example, Yin et al. (Yuan et al.,
2012) classified functional regions in Beijing using
a topic modelling based technique that helps to de-
fine a place as it was a document. Yuan et al. (Yin
et al., 2011) have addressed, including mobility data
on a similar topic modelling approach. Lin et al. (Lin
et al., 2018) extracted geographic features by count-
ing the number of PoI within grid cells.
Even that previous studies have examined the us-
age of geographic features, the validation of a more
appropriate feature engineering method is rarely dis-
cussed. For spatial predictions and urban analytics,
we believe that PoI density, instead of quantity, may
116
de Araujo, A., Marcos do Valle, J. and Cacho, N.
Geographic Feature Engineering with Points-of-Interest from OpenStreetMap.
DOI: 10.5220/0010155101160123
In Proceedings of the 12th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2020) - Volume 1: KDIR, pages 116-123
ISBN: 978-989-758-474-9
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

benefit predictive modelling in many applications,
due to a few reasons. Tobler’s First Law of Geog-
raphy (TFL), also mentioned by geographers as “spa-
tial dependency”, suggests that characteristics of near
places are contiguously correlated together. Also, it is
reasonable to think that predictive models can benefit
more from a diverse and balanced variable distribu-
tion, and by counting items within cells, having fell
samples may be a threaten for this, as we show.
To calculate PoI density, we evaluate the count-
based baseline method, which we refer here to as
the quadrat method, against kernel density estimation
(KDE) that generally produces relatively smoother
distributions. We evaluate these two by measuring
the spatial autocorrelation of the features provided
with Moran’s I, and spatial heterogeneity with the q-
index, which shall indicate how uneven features are
distributed. To visually compare these methods, we
conduct a qualitative assessment based on visual in-
spection of the spatial distribution for different sam-
ple sizes.
Also, from the best of our knowledge, we did
not find that related studies show a clear and repro-
ducible geographic feature engineering procedures,
either a piece of software that would support such
analysis. For this reason, we propose and demon-
strate Geohunter, a reproducible geographic feature
engineering framework that fetches OpenStreetMap
data and calculates the density of points-of-interest
throughout the city. We implemented it as open-
source python-package, currently with the functional-
ities of (i) loading data from the OpenStreetMap API,
(ii) parse OpenStreetMap data into commonly-used
geometric-based data structures (Geopandas (Jordahl,
2014)) and (iii) to extract geographic features from
points-of-interest with the methods used in this work.
This paper is divided as follows. In Section II, we
describe some aspects of the data source, the two geo-
graphic feature engineering methods used, our evalu-
ation approach, the evaluation approach, and provide
some details about the Geohunter. In Section III, we
show the results of our experiments, both in qualita-
tive and quantitative assessments. Finally, in Section
IV, we discuss some possible outcome analysis that
illustrates the usefulness of such geographic features.
2 DATA AND METHODS
2.1 OpenStreetMap Data
Over the last decade, WEB-based GIS technolo-
gies were created to provide reliable representations
of the urban environment. Among them, Open-
StreetMap certainly gained notoriety due to its sub-
stantial community-based contributions and because
of its open data policy. It drove the growth of the Vol-
unteered Geographic Information (VGI) culture, and
many studies, e.g. (Kounadi, 2009; Camboim et al.,
2015), have assessed the quality of information on
the platform. Nowadays, one can quickly request its
data through, for example, the Overpass
1
API. Open-
StreetMap has a particular data model to represent ob-
jects or Points-of-Interest (PoI) composed of “nodes”,
“ways” and “relations”, and each object can be cre-
ated, tagged and verified by the community. There are
a set of defined and most used tags to classify PoIs,
also referred to as “map features” (a complete de-
scription of them is provided in OpenStreetMap doc-
umentation
2
).
The Overpass API receives requests in a specific
query language (Overpass QL) and returns data con-
taining geographical coordinates and several other at-
tributes of the requested PoIs. For more details about
the structuring of these queries, we recommend the
API documentation. As mentioned, the returned ele-
ments follow the typology of (i) nodes, which defines
points in space, (ii) ways, which defines linear charac-
teristics and area boundaries, and (iii) relations, which
are used to explain how other elements work together.
An arbitrary PoI can be composed by a relation of
several ways and nodes. This typology is not directly
related to the geometric concepts of points, lines and
polygons.
The physical aspects of elements are described
by tags attached to them. Each tag is used to de-
scribe different aspects of an element, which can have
an unlimited number of tags describing them (as-
signed by the community). Furthermore, tags are
defined by a pair key:value, for instance, a church
can be represented by the tag building:church, and
also by amenity:place of worship. For this paper,
we select tags with the purpose of illustrating the
method discussed further in this paper which can in-
volve a variety of PoI. Table 1 details the keys, values
and amounts of data within the boundaries of Natal,
Brazil.
2.2 Geographic Feature Engineering
Methods
For each geographic object listed in Table 1, we ex-
tract a separate feature layer which describes density
values for places in the city. These places can be de-
fined following an administrative division of the city
1
https://wiki.openstreetmap.org/wiki/Overpass API
2
https://wiki.openstreetmap.org/wiki/Map Features
Geographic Feature Engineering with Points-of-Interest from OpenStreetMap
117
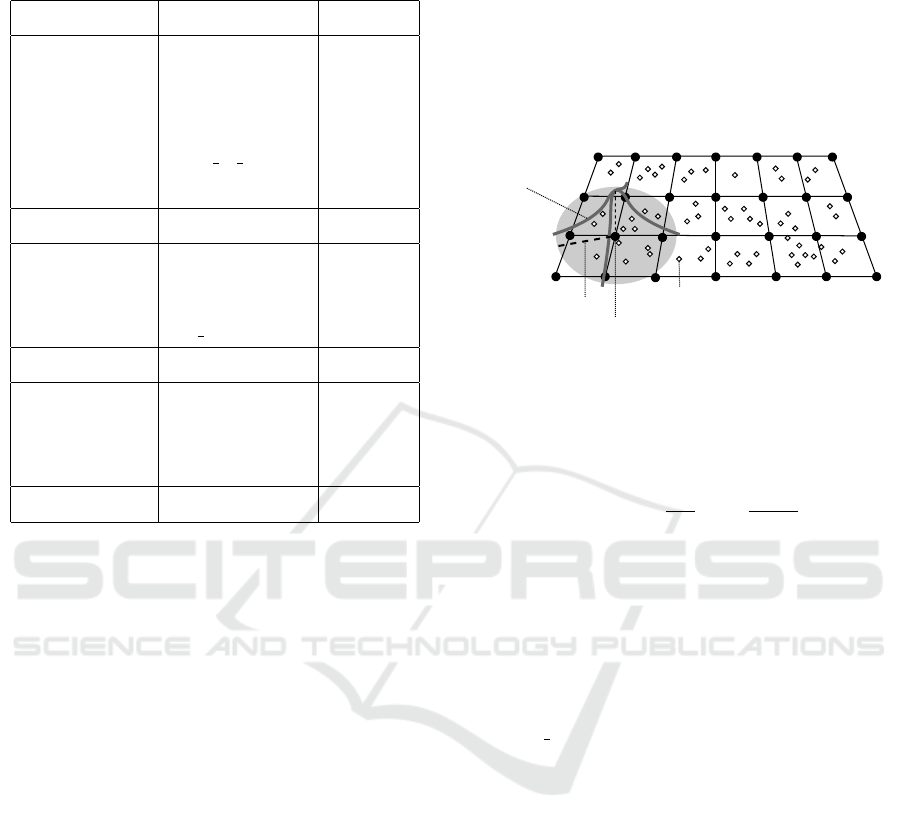
Table 1: Points-of-interest samples from data in Natal,
Brazil.
Map Features Tags Quantity
Amenity
restaurant 246
school 188
hospital 48
place of worship 154
police 39
Leisure
* 1248
Highway
primary 661
residential 8122
bus stop 417
Tourism
* 190
Natural
sand 54
wood 49
beach 16
Shop
* 1023
or an artificial grid configuration. The latter has the
advantage of resolution parametrization, i.e. one can
use a finer or coarser grid depending on the applica-
tion purposes. Regular geometries, such as points,
rectangles and even hexagons, are often used as the
spatial unit of analysis, or grid cell. In this paper, we
use an artificial grid composed of squares of 1km by
1km to assess the aggregation methods described be-
low. The aggregation of points within grid cells is a
relevant aspect for crafting better features.
2.2.1 Quadrat Method
A naive approach is to count the amount of PoI items
in regions of the city, which in this work, we refer to
as the quadrat method since the areas are square cells.
This method can be further generalized considering
other arbitrary geometries, using the same counting
method stated before. In the case of administrative
regions, one should normalize these values consider-
ing the respective areal density.
2.2.2 Kernel Density Estimation
The second approach consists of sampling the under-
lying probability density function, given a set of sam-
ples using a kernel. KDE is a mechanism to do so in a
non-parametric manner, firstly introduced by Rosen-
blatt (Rosenblatt, 1956) and Parzen (Parzen, 1962).
Illustrated by Figure 2, it consists of applying a kernel
function to return a density estimation of a set of arbi-
trary points, in particular for our study a grid of points
regularly spaced. Equation 1 defines it for bidimen-
sional estimation, where h is the bandwidth parameter
of the kernel function K applied, and d
x,y
(i) is the dis-
tance between all the occurrences i and the grid point
described by the coordinates x, y.
Kernelfunction
(Gaussian)
Bandwidth
Gridcell
Event
Figure 2: An illustration of Kernel Density Estimation and
its parameters. Each black point (grid cell) represents an
arbitrary place in which a kernel function applies a density
estimation around a bandwidth. For a set of events/points,
this procedure returns an array of KDE values indexed by
the identifier of the cell.
f (x, y | h) =
1
nh
2
n
∑
i=1
K(
d
x,y
(i)
h
) (1)
In this sense, KDE practitioners have discussed
rules and formulas to select internal parameters. In
general, smaller bandwidths retrieve spiky distribu-
tions which may cause overfitting, and larger band-
widths generate too smooth surfaces, with low varia-
tion between places thus resulting in underfitting. Sil-
verman (Silverman, 1986) suggests a rule of thumb
of selecting bandwidth of Gaussian kernels with h =
1.06
ˆ
σn
−
1
5
, considering
ˆ
σ, as
ˆ
σ the standard deviation
and n the sample size. Still, for other kernels, the like-
lihood maximization proposed by Jaki et al. (Jaki and
West, 2008) can be applicable. They suggest explor-
ing a parametrized version of KDE, which they called
Maximum Kernel Likelihood Estimation (MKLE),
providing an approach to select the best parameter
configuration by maximizing the log-likelihood, even
providing a formula for Gaussian kernels. In a simi-
lar approach, Mohler et al. (Mohler et al., 2011) and
Hu et al. (Hu et al., 2018) suggested to search for op-
timal parameters through likelihood cross-validation.
For this study, we chose to work with the Silverman’s
method for KDE parameter selection, using the Gaus-
sian kernel. The KDE implementation we used is
from the heavily used scipy python-package(Virtanen
et al., 2020).
As mentioned, in this paper, we are working with
square grids, instead of a point-based grid. Although
some related work has applied KDE with square grids
KDIR 2020 - 12th International Conference on Knowledge Discovery and Information Retrieval
118

(using the centroid of the square to apply KDE), we
argue that the bandwidth assumes a circular format,
not square. Instead, first, we apply KDE with a point-
based grid spaced by half of the square grid resolution
parameter. To get the resulting density estimation on
the square grid cells, we average the KDE results of
the grid points within the square grid cells.
2.3 Evaluation Method
We conduct the feature engineering approaches with
a grid resolution of 1km by 1km to quantify the in-
fluence of grid cell size on the quality of feature dis-
tribution. For a quantitative evaluation, we measure
the Moran’s I for global Spatial Autocorrelation (SA)
(Anselin, 1995). We consider spatial autocorrela-
tion an important measure following the Tobler’s First
Law of Geography that suggests near places are more
similar among each other, and our purpose is to repre-
sent PoI underlying density better. On the other hand,
we measure the q-statistic for Spatial Stratified Het-
erogeneity (SSH) to handle the traditional concept in
the geography of spatial heterogeneity, in which Leit-
ner et al. (Leitner et al., 2018) suggests that local
uniqueness should condition generalizations and pat-
tern extraction. Also, we conduct a qualitative analy-
sis by visual inspection of the feature distribution gen-
erated by the baseline and by KDE, with two feature
items taken from different sample sizes.
The Moran’s I is expressed in equation 2, where
N is the number of spatial units index by i and j, x the
variable of interest, ¯x its mean, w
i j
a matrix of spatial
weights, and W the sum of all weights in w
i j
. It quan-
tifies how much neighbours cells does correlate with
each other, and it ranges from -1 to 1. The metric
interpretation indicates that one means perfect clus-
tering (high spatial autocorrelation) of similar values,
-1 means perfect dispersion, and 0 means perfect ran-
domness (no spatial autocorrelation) (Anselin, 1995).
I =
N
W
∑
i
∑
j
w
i j
(x
i
− ¯x)(x
j
− ¯x)
∑
i
(x
i
− ¯x)
2
(2)
The q-statistic is expressed in Equation 3, where
L is the number of strata, N the size of the population
and σ
2
the variance of the attribute. It assesses data
heterogeneity among grid stratification, and it varies
from 0 to 1. The strata are sets of grid cells, for
instance, cells within the administrative neighbour-
hoods. A value close to 0 indicates that variances
within strata are similar (homogeneous). Conversely,
when values are close to 1 stratus’s variation are more
heterogeneous among each other, thus more prone to
represent different patterns among places. For further
details on the importance of measuring the q-statistic,
we refer to (Wang et al., 2016) that provide seminal
arguments and additional formal description on it.
q = 1 −
1
Nσ
2
L
∑
h=1
N
h
σ
2
h
(3)
2.4 The GEOHUNTER Python-package
To provide an open-source tool for other researchers
to extract geographic features and to ensure experi-
ment reproducibility, we developed the Geohunter
3
python-package. It aims to obtain and parse data
from OpenStreetMap to robust geospatial data struc-
tures, as provided by the GeoPandas package(Jordahl,
2014).
The workflow of Geohunter starts with a bound-
ing area, which can be taken from an input file for
the city shape (spatially encoded files, such as shape-
file or GeoJSON) or we can get it from the Geo-
hunter, setting a bounding box and request it with
its OpenStreetMap unique tags. One can easily re-
quest any data, including PoI and city shapes, by call-
ing our API facade, setting the tags and the values
wanted. Then, Geohunter parse and execute the Over-
pass query, get the results and parse as GeoPandas’
GeoDataFrame.
The grid object also uses the city shape, and Geo-
hunter provides functions for generating square grid
bounded by a particular area. Then, the grid and PoI
are used as input for the feature engineering method,
considering quadrat and KDE methods. By default,
we use Silverman’s method to retrieve KDE parame-
ters used, as mentioned before. The output is a matrix,
where each column represents a geographic feature,
and each row indicate a tuple of feature values for a
given grid cell. In the package’s GitHub repository,
there are a few examples on how to use Geohunter,
including to reproduce or clarify the experiment de-
scribed in this paper.
3 RESULTS
Using the dataset gathered from Natal, Brazil, we
extracted geographic features using both methods,
quadrat and KDE. Since there is a diverse set of sam-
ple sets, ranging from beaches with 16 samples, to
residential streets with 8122, we argue that useful
comparisons can be made on different scenarios.
3
https://geohunter.readthedocs.io/en/latest/
Geographic Feature Engineering with Points-of-Interest from OpenStreetMap
119
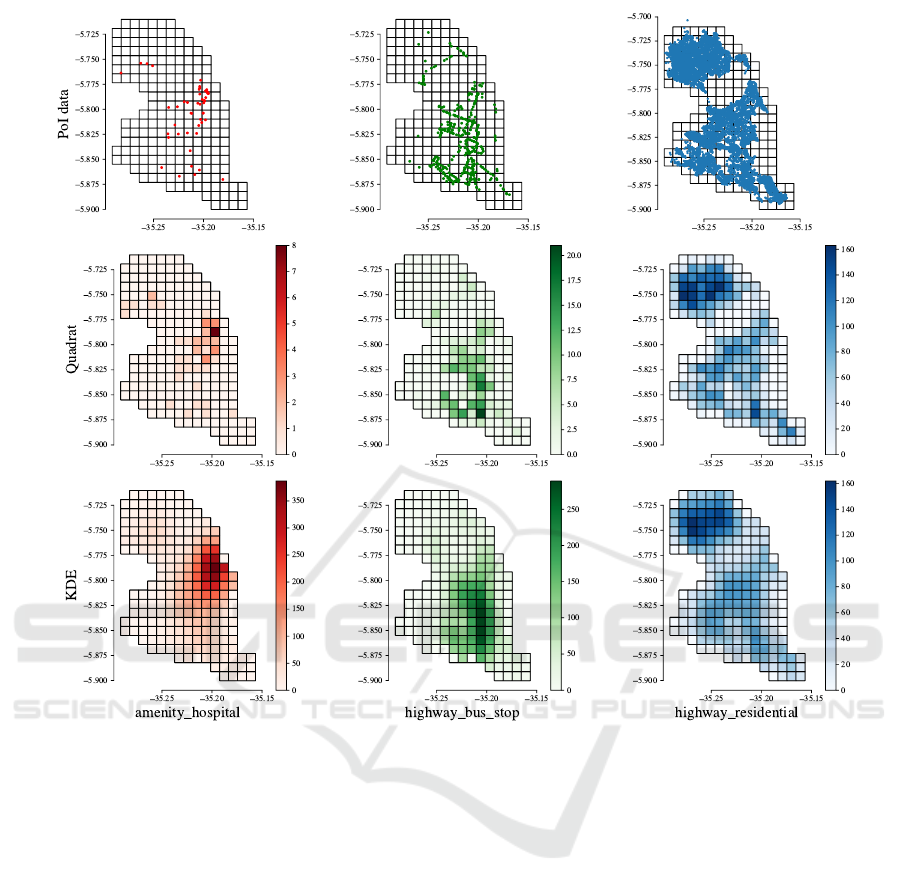
Figure 3: The density of PoI data (first row) using the quadrat method (second row) and KDE (third row) for three categories.
Hospitals map with 48 points in red is representative because it shows that with a few samples, the method visually differs
significantly. Bus stops map with 417 items in green also follows such difference. On the right side, residential streets map
with 8122 samples in blue shows that with a massive amount of points, it is hard to detect a difference in feature distribution
visually, but KDE still generated a smoother map.
3.1 Qualitative Assessment
To demonstrate the visual effect of the extracted fea-
tures in a grid with 1km by 1km cells, we present
the Figure 3. It has the spatial density of three PoI
items (48 hospitals in red, 417 bus stops in green
and 8122 residential streets in blue), as well as their
feature distribution with the quadrat method (middle
row) and KDE (last row). We pick these three because
they represent different sample sizes and support fur-
ther inspections on possible sample size-dependent
behaviour. Note that with fewer samples, the quadrat
method is more likely to have neighbour cells with to-
tally different values when comparing to KDE. How-
ever, when having a massive amount of samples, the
maps become more similar to each other. With this vi-
sual inspection, one can find that KDE-based features
are relatively more parsimonious than quadrat ones, in
all three cases, even when more data is available. In a
possible question involving what is the coverage area
of hospitals, we argue that the KDE ones are more
likely to represent the reality.
3.2 Quantitative Assessment
In section 2.3, we discussed that the quantitative eval-
uation conducted in this article is guided by two es-
sential concepts of geography, spatial autocorrelation
through Moran’s I, and spatial heterogeneity, calcu-
lated through q-statistic (Wang et al., 2016). These
metrics are relevant to evaluate our hypothesis that
KDE is, in fact, more meaningful for PoI density rep-
resentation, following the geography rules described
earlier.
KDIR 2020 - 12th International Conference on Knowledge Discovery and Information Retrieval
120
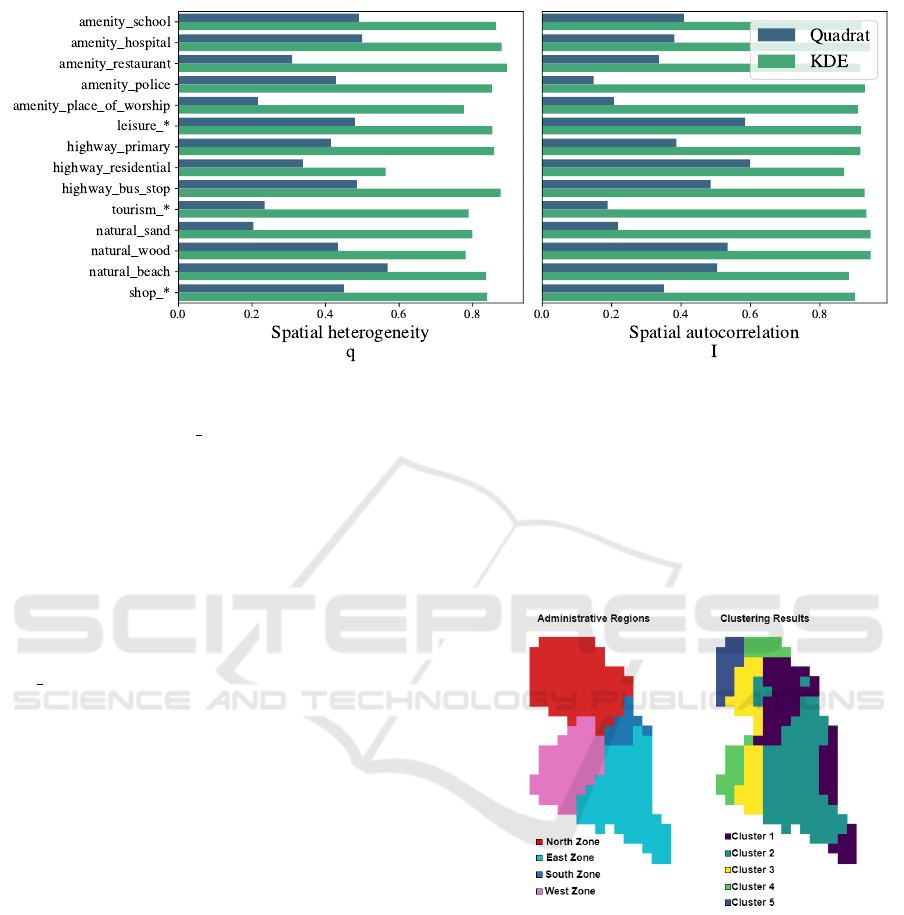
Figure 4: Comparison between the quadrat method and KDE regarding spatial heterogeneity (q) and spatial autocorrelation
(I) for all features extracted. Clearly, KDE performed better than quadrat in both metrics, even in cases where more samples
are available (e.g. highway residential).
In this sense, we report in Figure 4 the results of
these metrics for the quadrat and KDE methods, with
the grid resolution of 1km by 1km. Note that KDE
overcomes quadrat-based features in all scenarios,
with high values of both q and I, which indicate that
features extracted with KDE have higher spatial au-
tocorrelation and heterogeneity between cells. Such
a pattern was noticed even when massive amounts of
samples are available, e.g. residential streets (high-
way residential).
4 DISCUSSION
In Section II, we mentioned that results obtained us-
ing the Geohunter Package can be used as input for
a diverse set of predictive algorithms. To illustrate
some of the possible applications of using these fea-
tures, here we provide some examples on spatial pat-
tern analysis of urban spaces using geographic fea-
tures.
First, we used K-means on Geohunter’s output for
the city of Natal using Table 1 features. For com-
parison reasons, K-means was performed with five
clusters, similar to the same number of administra-
tive regions in Natal, which is four. Figure 5 shows
the administrative regions (left) and the clustering re-
sults (right). It is possible to assess the difference be-
tween city characteristics in both images. Using the
clustering results, we have some areas of resemblance
in an inter-regional fashion. Bodies of water (tightly
related to touristic areas), commercial zones and sub-
urbs (represented by clusters 1, 2 and 3 respectively)
are related to various administrative regions of the
city. We also argue that this output is more useful than
traditional counting data obtained by cities census, at
least for this type of application. Other example is
illustrated in Figure 6, where we show three cluster
of the city given the three features early mentioned,
hospitals, bus stops and residential streets.
Figure 5: Comparison between Natal’s administrative areas
(left) and the result of clustering using geographic features
acquired from Geohunter (right).
Also, as stated before, with Geohunter, it is possi-
ble to obtain the density of several features in the city.
This can be used, for example, to analyse the density
of police stations or hospitals in it, which is useful in-
formation to city planners to do decisions based on.
Also, it is possible to make other analysis, such as,
the relation between city facilities (hospitals, schools,
police stations) and crime spots, air pollution density,
traffic, agglomerations and several other urban phe-
nomena.
Geographic Feature Engineering with Points-of-Interest from OpenStreetMap
121

Figure 6: Clustering three zones of the city considering hos-
pitals, bus stops and residential streets. Above, note the spa-
tial distribution of the clusters, and below, the distribution
of the features for each cluster. The area C0 is characterized
as with almost no hospitals, a few bus stops and a varying
amount of residential streets, while C1 and C2 are easily
distinguished by the number of bus stops and hospitals.
5 CONCLUSION
In this paper, we proposed a reproducible framework
for geographic feature engineering in which future
work can rely on to analyse geographic patterns of ur-
ban spaces with an easy interface to OpenStreetMap.
We assessed two spatial aggregation methods regard-
ing their spatial heterogeneity and autocorrelation. In
our experiments, we provided evidence that the usage
of the KDE, if compared with the quadrat method,
has much to contribute in terms of urban represen-
tation and feature engineering. Also, we presented
the Geohunter python-package to create an interface
with OpenStreetMap data and a heavily used geospa-
tial tool (GeoPandas (Jordahl, 2014)). We provided a
brief example using the features to illustrate its appli-
cability. For future work, we suggest taking these fea-
tures and applying for environmental and urban pre-
dictions and experimenting with different grid reso-
lution and parameter settings. Modern data sources
support uncovering more geographical patterns, and
we argue that is it time to pursue ubiquitous analysis.
ACKNOWLEDGEMENTS
This work is supported by the SmartMetropolis
4
and
the Laboratory for Public Budget and Policies (LOPP)
of the Public Ministry of the State of Rio Grande do
Norte (MPRN).
REFERENCES
Anselin, L. (1995). Local indicators of spatial associa-
tion—lisa. Geographical analysis, 27(2):93–115.
Camboim, S. P., Bravo, J. V. M., and Sluter, C. R. (2015).
An investigation into the completeness of, and the
updates to, openstreetmap data in a heterogeneous
area in brazil. ISPRS International Journal of Geo-
Information, 4(3):1366–1388.
Davies, T. and Johnson, S. D. (2015). Examining the rela-
tionship between road structure and burglary risk via
quantitative network analysis. Journal of Quantitative
Criminology, 31(3):481–507.
Estima, J. and Painho, M. (2013). Exploratory analysis
of openstreetmap for land use classification. In Pro-
ceedings of the second ACM SIGSPATIAL interna-
tional workshop on crowdsourced and volunteered ge-
ographic information, pages 39–46. ACM.
Gustafson, E. J. (1998). Quantifying landscape spatial
pattern: what is the state of the art? Ecosystems,
1(2):143–156.
Hopf, K. (2018). Mining volunteered geographic informa-
tion for predictive energy data analytics. Energy In-
formatics, 1(1):4.
Hu, Y., Wang, F., Guin, C., and Zhu, H. (2018). A spatio-
temporal kernel density estimation framework for pre-
dictive crime hotspot mapping and evaluation. Ap-
plied geography, 99:89–97.
Jaki, T. and West, R. W. (2008). Maximum kernel like-
lihood estimation. Journal of Computational and
Graphical Statistics, 17(4):976–993.
Jordahl, K. (2014). Geopandas: Python tools for geographic
data. URL: https://github. com/geopandas/geopandas.
Kounadi, O. (2009). Assessing the quality of openstreetmap
data. Msc geographical information science, Univer-
sity College of London Department of Civil, Environ-
mental And Geomatic Engineering.
Leitner, M., Glasner, P., and Kounadi, O. (2018). Laws of
Geography. Oxford University Press, United King-
dom.
Lin, Y.-L., Yen, M.-F., and Yu, L.-C. (2018). Grid-based
crime prediction using geographical features. ISPRS
International Journal of Geo-Information, 7(8):298.
4
https://smartmetropolis.imd.ufrn.br/
KDIR 2020 - 12th International Conference on Knowledge Discovery and Information Retrieval
122

Mohler, G. O., Short, M. B., Brantingham, P. J., Schoen-
berg, F. P., and Tita, G. E. (2011). Self-exciting point
process modeling of crime. Journal of the American
Statistical Association, 106(493):100–108.
Parzen, E. (1962). On estimation of a probability density
function and mode. The annals of mathematical statis-
tics, 33(3):1065–1076.
Rosenblatt, M. (1956). Remarks on some nonparametric
estimates of a density function. The Annals of Mathe-
matical Statistics, pages 832–837.
Silverman, B. W. (1986). Density estimation for statistics
and data analysis.
Virtanen, P., Gommers, R., Oliphant, T. E., Haberland, M.,
Reddy, T., Cournapeau, D., Burovski, E., Peterson,
P., Weckesser, W., Bright, J., et al. (2020). Scipy
1.0: fundamental algorithms for scientific computing
in python. Nature methods, 17(3):261–272.
Wang, J.-F., Zhang, T.-L., and Fu, B.-J. (2016). A measure
of spatial stratified heterogeneity. Ecological Indica-
tors, 67:250–256.
Yin, Z., Cao, L., Han, J., Zhai, C., and Huang, T. (2011).
Geographical topic discovery and comparison. In
Proceedings of the 20th international conference on
World wide web, pages 247–256. ACM.
Yuan, J., Zheng, Y., and Xie, X. (2012). Discovering re-
gions of different functions in a city using human
mobility and pois. In Proceedings of the 18th ACM
SIGKDD international conference on Knowledge dis-
covery and data mining, pages 186–194. ACM.
Geographic Feature Engineering with Points-of-Interest from OpenStreetMap
123
