
Classifying Incomplete Vectors using Decision Trees
Bhekisipho Twala
1a
, Raj Pillay
2
and Ramapulana Nkoana
3
1
Faculty of Engineering and the Built Environment, Durban University of Technology, Durban 4000, South Africa
2
City of Johannesburg, Group Governance Department, Johannesburg 2000, South Africa
3
CSIR, Climate Change Modelling Group, Pretoria 0001, South Africa
Keywords: Incomplete Data, Supervised Learning, Decision Trees, Logit Models, Classification Accuracy.
Abstract: An attempt is made to address the problem of classifying incomplete vectors using decision trees. The essence
of the approach is the proposal that in supervised learning classification of incomplete vectors can be
improved in probabilistic terms. This approach, which is based on the a priori probability of each value
determined from the instances at that node of the tree that has specified values, first exploits the total
probability and Bayes’ theorems and then the probit and logit model probabilities. The proposed approach
(developed in three versions) is evaluated using 21 machine learning datasets from its effect or tolerance of
incomplete test data. Experimental results are reported, showing the effectiveness of the proposed approach
in comparison with multiple imputation and fractioning of instances strategy.
1 INTRODUCTION
Datasets are seldom complete and this can introduce
biases, hence, incorrect predictions when using
supervised machine learning models. The three most
common tasks when dealing with incomplete data is
to investigate the proportion (how much information
is lost because of missing), the pattern (which values
are missing) and the law generating the missingness
(whether missingness is related to the study
variables). When missing values are confined to a
single variable we have a univariate pattern or
univariate nonresponse. When the same cases miss
instances on a set of variables we have a multivariate
nonresponse pattern. The monotonic pattern occurs
when missing a subject implies that other variables
will be missing as well. Arbitrary patterns occur when
any set of variables may be missing for any unit.
Another missing data pattern could occur when two
sets of variables are never jointly observed. Finally,
there are cases where no clear pattern could occur
(general non-response). (Little and Rubin, 1987;
Schafer, 1996).
Understanding the law generating the missing
values seems to be the most important task since it
facilitates how the missing values could be estimated
more efficiently. If data are missing completely at
a
https://orcid.org/0000-0000-3452-9581
random (MCAR) or missing at random (MAR), we
say that missingness is ignorable.
For example, suppose that you are modelling
systems engineering as a function of project
management requirements. There may be no
particular reason why some systems engineers told
you about their project management requirement and
others did not. Such data is considered to be MCAR.
Furthermore, the requirements of managing a project
may not be identified due to a given systems
engineering task. Such data are considered to be
MAR. MAR essentially says that the cause of missing
data (project management requirements) may be
dependent on the observed data (systems
engineering) but must be independent of the missing
value that would have been observed. It is a less
restrictive model than MCAR, which says that the
missing data cannot be dependent on either the
observed or the missing data. For data that is
informatively missing (IM), we have non-ignorable
missingness (Little and Rubin, 1987), that is, the
probability that a successful project is missing
depends on the unobserved value of an engineering
system itself. In other words, the missing data
mechanism is related to the missing values. For
example, software project managers may be less
likely to reveal projects with high defect rates.
Twala, B., Pillay, R. and Nkoana, R.
Classifying Incomplete Vectors using Decision Trees.
DOI: 10.5220/0010146304550463
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 455-463
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
455

When missing features are encountered, some ad
hoc approaches such as deleting the data vectors with
missing values or imputation have been utilized by
researchers to form a complete-data format. Deletion
does not add bias if the data are missing completely
at random (MCAR) but can lower the confidence of
your supervised machine learning models because the
sample size is reduced. Imputation means that
predicted or representative values are filled in place
of the missing data. If data are MCAR, imputation
tends to produce and overconfident model due to the
uncertainty that the values are artificially imputed.
Some researchers have used sophisticated built-in
system procedures to deal with the incomplete data
problem such as C4.5 (Quinlan, 1993) and CART
(Breiman et al., 1984) and probability estimation
(Khosravi et al., 2020).
The major contribution of the paper is the
proposal that classifying incomplete vectors with the
decision tree classifier can be performed in
probabilistic terms. This approach is based on the a
priori probability of each value determined from the
instances at that node of the tree that has specified
values.
The rest of the paper is organised as follows.
Section 2 briefly discusses the details of five missing
data techniques (MDTs) that are used in this paper.
The framework of the proposed probabilistic method
is also introduced and described. Section 3
empirically evaluates the robustness and accuracy of
the new technique in comparison with multiple
imputation and Quinlan’s fractioning of cases
strategy on twenty-one machine learning domains.
We close with a discussion and conclusions, and then
directions for future research
2 DECISION TREES AND
MISSING DATA
DTs are a simple yet successful technique for
supervised classification learning. A DT is a model of
the data that encodes the distribution of the class label
in terms of the predictor attributes; it is a directed,
acyclic graph in the form of a tree. The root of the tree
does not have any incoming edges. Every other node
has exactly one incoming edge and zero or more
outgoing edges. If a node n has no outgoing edges we
call n a leaf node, otherwise, we call n an internal
node. Each leaf node is labelled with one class label;
each internal node is labelled with one predictor
attribute called the splitting attribute. Each edge e
originating from an internal node n has a predicate q
associated with it where q involves only the splitting
attribute of n.
Several methods have been proposed in the
literature to treat missing data when using DTs.
Missing values can cause problems at two points
when using DTs; 1) when deciding on a splitting point
(when growing the tree), and 2) when deciding into
which child node each instance goes (when
classifying an unknown instance). Methods for taking
advantage of unlabelled classes can also be
developed, although we do not deal with them in this
paper, i.e., we are assuming that the class labels are
not missing.
The next section describes two MDTs that have
been proposed in the literature to treat missing data
when using DTs. These techniques are also the ones
used in the simulation study in Section 3.
2.1 Multiple Imputation
Multiple imputation is one of the most attractive
methods for general purpose handling of missing data
in multivariate analysis. (Rubin, 1987; 1996)
described MI as a three-step process. First, sets of M
plausible values (M=5 in Figure1) for missing
instances are created using an appropriate model that
reflects the uncertainty due to the missing data. Each
of these sets of plausible values is used to “fill-in” the
missing values and create M “complete” datasets
(imputation). Second, each of these M datasets can be
analyzed using complete-data methods (analysis).
Finally, the results from the M complete datasets are
combined, which also allows the uncertainty
regarding the imputation is taken into account
(pooling or combining).
There are various ways to generate imputations.
(Schafer, 1997; Schafer and Graham, 2002) has
written a set of general-purpose programs for MI of
continuous multivariate data (NORM), multivariate
categorical data (CAT), mixed categorical and
continuous (MIX), and multivariate panel or clustered
data (PNA). These programs were initially created as
functions operating within the statistical languages R.
NORM includes an Expectation-maximization
(EM) algorithm for maximum likelihood estimation of
means, variance and covariances. NORM also adds
regression-prediction variability by using a Bayesian
procedure known as data augmentation (Tanner and
Wong, 1987) to iterate between random imputations
under a specified set of parameter values and random
draws from the posterior distribution of the parameters
(given the observed and imputed data). These two
steps are iterated long enough for the results to be
reliable for multiple imputed datasets. The goal is to
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
456

have the iterates converge to their stationary
distribution and then to simulate an approximately
independent draw of the missing values (Wu, 1983).
This is the approach we follow in the paper, which we
shall now call EM multiple imputation (EMMI). The
algorithm is based on the assumptions that the data
come from a multivariate normal distribution and are
MAR
2.2 Fractioning of Cases (FC)
Supervised learning algorithms, like fractioning of
cases (FC), have been successfully used to handling
incomplete data although they are generally more
complex than ordinary statistical techniques.
Supervised learning is a machine learning technique
for learning a function from training data. The
training data consists of pairs of input objects
(typically vectors), and desired outputs. The output of
the function can be a continuous value (called
regression) or can predict a class label of the input
object (called classification).
Quinlan, (1993) borrows the probabilistic
approach by Cestnik et al., (1987) by “fractioning”
cases or instances based on a priori probability of
each value determined from the cases at that node that
has specified values. Quinlan starts by penalising the
information gain measure by the proportion of
unknown cases and then splits these cases to both
subnodes of the tree as described briefly below.
The learning phase requires that the relative
frequencies from the training set be observed. Each
case of, say, class C with an unknown attribute value
A is substituted. The next step is to distribute the
unknown examples according to the proportion of
occurrences in the known instances, treating an
incomplete observation as if it falls all subsequent
nodes.
For classification, Quinlan’s (1993) technique is
to explore all branches below the node in question and
then take into account that some branches are more
probable than others. Quinlan further borrows
Cestnik et al. (1987) strategy of summing the weights
of the instance fragments classified in different ways
at the leaf nodes of the tree and then choosing the
class with the highest probability or the most probable
classification. When a test attribute has been selected,
the cases with known values are divided into the
branches corresponding to these values. The cases
with missing values are, in a way, passed down all
branches, but with a weight that corresponds to the
relative frequency of the value assigned to a branch.
Both strategies for handling missing attribute
values are used for the C4.5 system. Unfortunately,
for FC, there are no assumptions made about the law
generating the missing values. Thus, we shall assume
that the data is MCAR.
2.3 Probability Estimation Approach
The proposed probabilistic approach to missing
attribute values follows both branches from each node
if the value of the attribute being branched on is not
known.
Given mutually exclusive events
,…,
whose probabilities sum to unity, then
=
∑
|
(2.1)
where is an arbitrary event and
|
is the
conditional probability of Y assuming
. This is the
theorem of total probability.
The total probability theorem and the definition of
conditional probability (introducing an arbitrary
event Z) may be used to derive
|
=
∑
|
,
|
(2.2)
The missing value problem addressed in this paper
can be defined as follows:
Given: A decision tree, a complete set of training
data, and a set of instances for testing described with
attributes and their values. Some of the attribute
values in the test instances are unknown.
Find: A classification rule for a new instance using
the tree structure given that it has an unknown
attribute value and by using the known attribute
values.
Let be the attribute associated with a particular
node of the tree that could either be discrete or
numerical. A discrete attribute has a certain number
of possible values and a continuous attribute may
attain any value from a continuous interval. Each
node is split into two sons (left and right sons). Hence,
a new instance could either go to the left (L) or the
right (R) of each internal node. Further, let be the
binarised value for attribute. Let C denote a class
and let there be classes, =1,…,.
The total probability theorem is used to predict the
class membership of an unknown attribute value by
computing the conditional probability of a class
given the evidence of known attribute values.
For individual j, divide the attributes in the tree
into classes for both
(the known attribute values)
and
(the missing attribute values). Then
=
∑
, (2.3)
where the sum is over all possible combinations of
values that branch to the left (L) or right (R) at each
Classifying Incomplete Vectors using Decision Trees
457
respective internal node, taken by the vector of the
missing attribute values
. For the unknown attribute
values, the unit probability may be distributed across
the various leaves to which the new instance could
belong. These probabilities are going to be estimated
to each class in three ways as explained below.
For illustration purposes, suppose that from
Figure 1 the values for
(categorical attribute) and
(numerical attribute) are missing, and
is the
only numeric attribute with non-missing values.
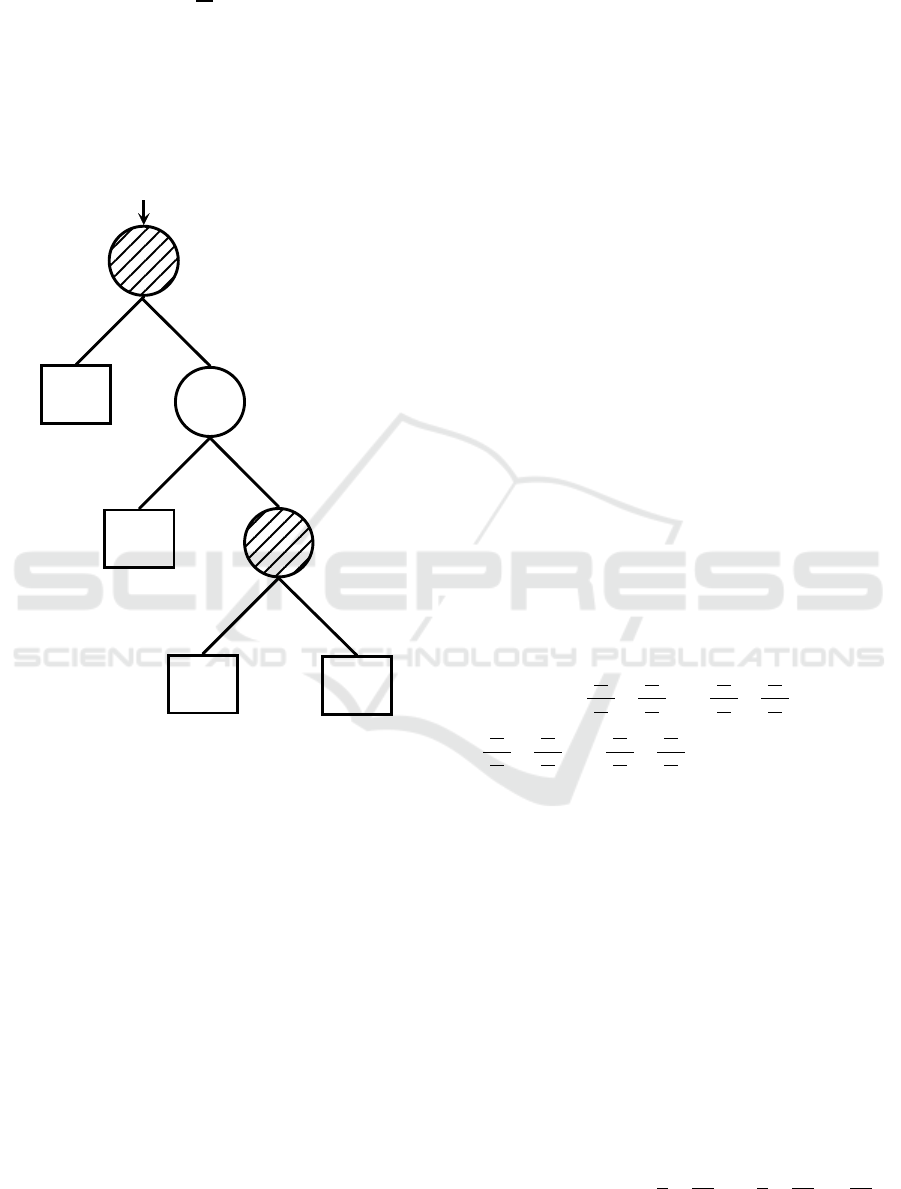
Figure 1: Example of binary decision.
Figure 1 An example of a binary decision tree
from a set of 40 training instances that are represented
by three attributes and accompanied by two classes.
Figures in brackets are the number of instances in
each terminal node for class 1 and 2, respectively.
Figures in italic represent training data instances that
branch to the right or the left of each internal node at
each respective cut-off point. For purposes of space,
we shall only look at the second case.
First Case: Class membership for a new instance is
predicted given that it will branch to the left of the
internal node
), given that both
and
have unknown attribute values.
The probability that the predicted class
membership will be class 1 given that it branches to
the left at internal attribute 2
|
is computed
as:
|
=
|
,
,
,
|
+
|
,
,
,
|
+
|
,
,
,
|
+
|
,
,
,
|
(2.4)
Similarly,
|
=
|
,
,
,
|
+
|
,
,
,
|
+
|
,
,
,
|
+
|
,
,
,
|
=1−
|
(2.5)
Second Case: Class membership for a new instance
given that it will branch to the right of the internal
node
is predicted, given that both
and
have unknown attribute values. The class with the
biggest probability is selected. We can define the
probability that the predicted class membership will
be class 1 given that it branches to the right of internal
attribute 2 2
|
and follows a similar pattern
as the first case.
2.3.1 Full Estimation of Probabilities from
the Training Set (TSPE)
From Figure 1, there is 1 class and 1 individual
associated with
<4061.5
,
<3.5
,
<21.5
, 1 class and 1 individual with
,
,
and so on. Also, one of the 7
individuals
(i.e.
<4061.5) has
,
, another 1 has
,
and so on. Therefore, the estimated probability of
membership of class 1 is given by:
|
=
+
+
+
=0.839 (2.6)
Following from (2.6),
|
=1−
|
=0.161where
|
and
|
are both estimated from the proportion of instances in
the training set for which this is true, respectively.
2.3.2 Approximation of Probabilities
Estimated from Decision Tree (DTPE)
From figure 1, the estimated probability of
membership of class 1 is given by:
|
=
|
,
|
+
|
,
|
(2.7)
where
|
,
=
|
,
|
,
+
|
,
|
,
=
4
6
6
15
+
7
9
9
15
=
11
15
A
1
A
2
A
3
1
2
9
22
7
15
1
1
6
18
(17,1)
(2,5)
(4,2)
(7,2)
>3.5
<3.5
<4061.5
>4061.5
>21.5 <21.5
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
458

therefore,
|
≈
11
15
22
40
+
17
18
18
40
=0.828
Using (2.7),
|
=
|
,
|
+
|
,
|
=1−
|
=0.172
2.3.3 Full Estimation of Probabilities from
Training Data using Binary and
Multinomial Logit Models (LPE)
In this sub-section, the estimation of probabilities for
the new probabilistic method is improved by using
logistic regression (Agresti 1990; McCullough and
Nelder, 1990) and multinomial logit techniques
(Hosmer and Lemeshow, 1989; Long, 1998),
individually. The binary logit model is used to
estimate probabilities for those datasets that have two
classes with the latter used to estimate probabilities
for datasets with more than two classes.
McCullugh and Nelder (1990) discuss how
classification and discrimination problems as forms
of modelling the relationship between a categorical
variable and various explanatory variables are
considered. It was shown how logistic regression
techniques could be used for such a task. For
example, suppose that there are two classes, 1 and 2,
,
and v attribute variables
,…,
. Then the
probability that an object with values
,…,
belongs to class 1 as a logistic function of
,…,
could be modelled:
|
=
⋯
⋯
(2.8)
and then estimate the unknown parameters
from
the training data on objects with known
classifications.
Binary logit models describe the relationship
between a dichotomous response variable and a set of
explanatory variables of any type. The explanatory
variables may be continuous or categorical. Binary
logit tries to model the logarithmic odds-ratio for the
classification (dependent variable C) as a linear
function of the ‘input’ or attribute variables
=
,
,…,
.
For purposes of this paper, the binary logit model
was not used to estimate probabilities based on all the
attributes given in the dataset, but to estimate only the
unknown probabilities of the given attributes
specifically related to the problem. For each specific
attribute, the values of the instances were made binary
in accordance to the branching of that particular value
at the internal node of the tree, i.e., whether the value
branched to the left or the right at the internal node.
For example, if the value branched to the left of the
internal node of interest, it was recorded as 1.
Otherwise, it was recorded as 2.
For the two-class example discussed in Section
2.3.1, the conditional probabilities involving only the
class given in equations 3.3 and 3.4, could be
estimated by the binary logit model in terms of the log
odds ratio in the form:
log
=
+
(2.9)
where
is the k dimensional coefficient vector. The
odds ratio is a factor of how many times the event (
)
is more likely to happen than the event (
) given the
knowledge of A.
For an example
|
,
,
is estimated by
log
,
,
,
,
=
+
+
+
Although the binary logit model finds the best
‘fitting’ equation just as the linear regression does, the
principles on which it does so are different. Instead of
using the least-squares deviations criterion for the
best fit, it uses a maximum likelihood method, which
maximises the probability of getting the observed
results given the fitted regression coefficients.
We have talked about a model that could be used
for a dependent variable that has only two possible
categories or two classes for the example. We shall
now look at a model that will be able to handle a
three-classes or more type of problem. These models
are known as multinomial logit regression (MLR) and
have the following form:
=
∑
for =1,…,+1 (2.10)
which will automatically yield probabilities that add
up to one for each j.
To identify the parameters of the model,
is
set to 0 (a zero vector) as a normalisation procedure
and thus:
=
∑
(2.11)
In the multinomial logit model, the assumption is that
the log-odds of each response follow a linear model.
Thus, the j
th
logit has the following form:
log
=
(2.12)
Classifying Incomplete Vectors using Decision Trees
459
where
is a vector of regression coefficients for
=1,…,. This model is analogous to the LR model,
except that the probability distribution of the response
is multinomial instead of binomial and there are k
equations instead of one. The k multinomial logit
equations contrast each of categories =1,…, with
category k+1, whereas a single logistic regression
equation is a contrast between successes and failures.
If k = 1 the multinomial logit model reduces to the
usual binary regression model. The multinomial logit
model is, in fact, equivalent to running a series of
binary logit models (Hosmer and Lemeshow, 1989,
Long, 1998).
The crucial difference between FC and the
proposed approach is that whereas the proposed
procedure considers only those instances belonging to
that particular class for which an unknown instance
would be classified, FC considers all the instances
branching to that particular leaf node whose class is
being predicted, and which would be given at the
particular leaf node. For illustration purposes on how
the proposed technique works, the reader is referred
to Twala (2005).
3 EXPERIMENTS
3.1 Experimental Set-up
In this section, the behaviour of the three proposed
procedures against two approaches that have
previously been proposed for handling unknown
attribute values in test data when using DTs is
explored utilizing twenty-one datasets obtained from
the machine learning repository (Murphy and Aha,
1992).
The two current methods selected (EMMI and
FC) are the ones which provided very good results in
the experiments carried out in (Twala, 2005; Twala et
al., 2008). The main objective is to compare the
performance of the proposed methods(TSEPE, DTPE
and LPE) with current approaches to deal with the
problem of incomplete test data in terms of smoothed
error rate and computational cost. EMMI is used as a
baseline as it was clearly ‘the winner’ in previous
experiments (Twala and Cartwright, 2005; Twala et
al., 2005). Besides, since the proposed algorithm is
superficially similar to FC (one of the most well-
known machine learning algorithm), it was of
importance to explore how accurate it is relative to
FC.
To perform the experiment each dataset was split
randomly into 5 parts (Part I, Part II, Part III, Part IV,
Part V) of equal (or approximately equal) size. 5-fold
cross-validation was used for the experiment. For
each fold, four of the parts of the instances in each
category were placed in the training set, and the
remaining one was placed in the corresponding test.
The same splits of the data were used for all the
methods for handling incomplete test data.
To simulate missing values on attributes, the
original datasets are run using a random generator
(for MCAR) and a quintile attribute-pair approach
(for both MAR and IM, respectively). Both of these
procedures have the same percentage of missing
values as their parameters. These two approaches are
run to get datasets with four levels of the proportion
of missingness p, (0%, 15%, 30% and 50%).
For each dataset, two suites were created. First,
missing values were simulated on only one attribute.
Second, missing values were introduced uniformly on
all the attribute variables. For the second suite, the
missingness was evenly distributed across all the
attributes. This is the case for the three missing data
mechanisms, which from now on shall be called
MCARuniva, MARuniva, IMuniva (for the first
suite) and MCARunifo, MARunifo, IMunifo (These
procedures are described in Twala (2005).
3.2 Experimental Results
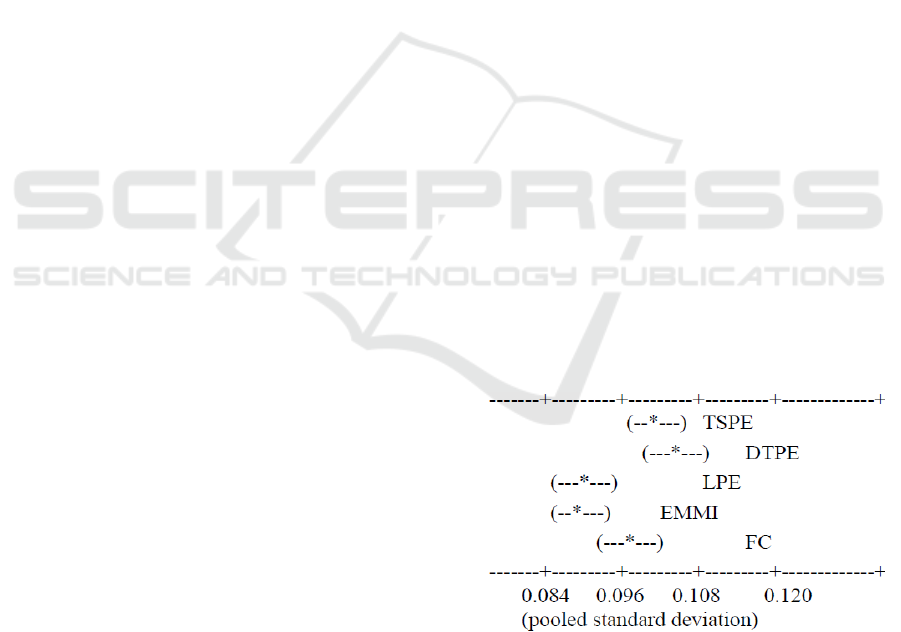
The performance of the MDTS is summarised in
Figure 2. The best method for handling incomplete
test data using DTs is EMMI, followed by LPE, FC,
TSPE and DTPE, respectively. There also appears to
be small differences in error rate between TSPE and
DTPE, on the one hand, and LPE and EMMI, on the
other hand. The differences between the two pairs of
methods are significant at the 1% level.
Figure 2: Current and new methods: confidence intervals of
mean error rates (*).
Figure 3 summarises the overall excess error rates
for current and new testing methods against three
amounts of missing values and the law generating the
missing values. The error rates of each method of
dealing with the introduced missing values are
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
460
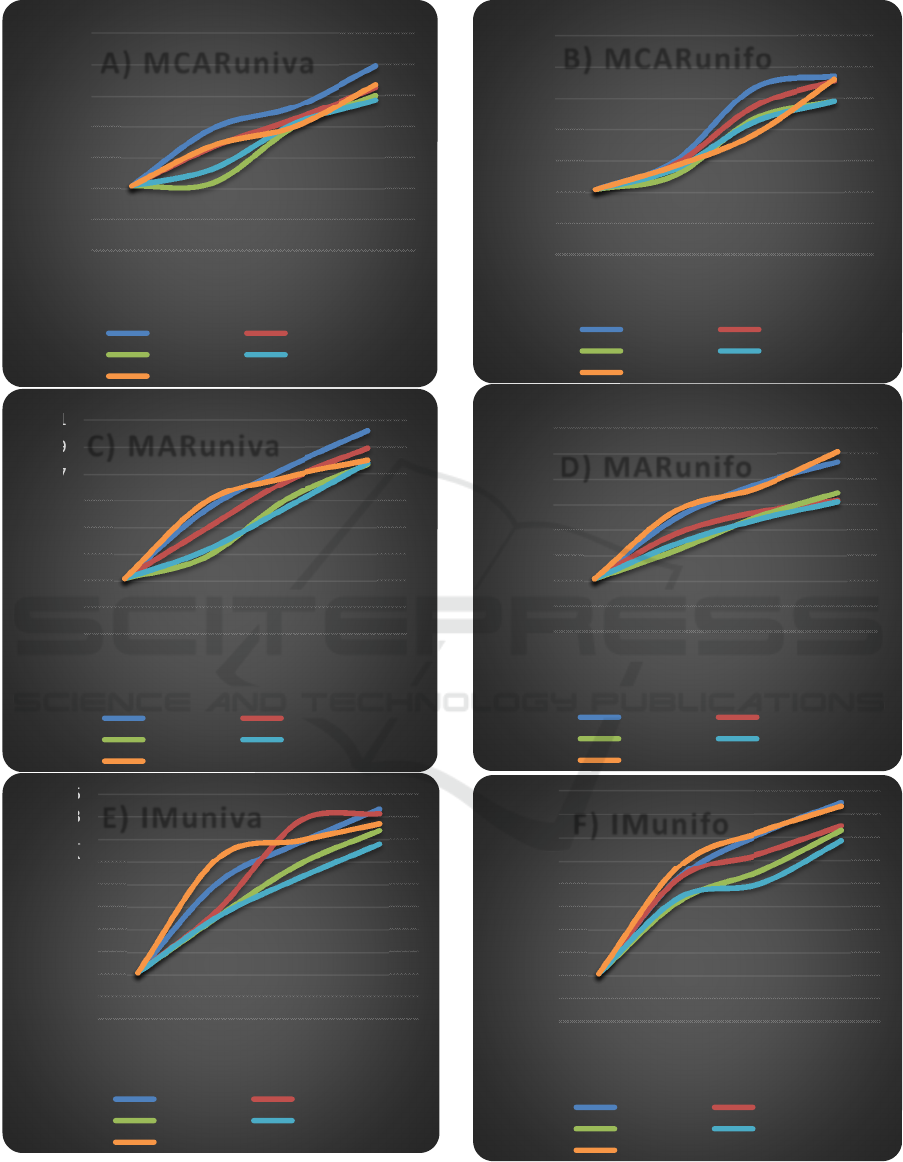
Figure 3: Comparative results of current and new testing methods A) MCARuniva, B) MCARunifo, C) MARuniva, D)
MARunifo, E) IMuniva, F) IMunifo.
15
17
19
21
23
25
27
29
0153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
A) MCARuniva
TSPE DTPE
LPE EMMI
FC
15
17
19
21
23
25
27
29
31
0153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
C) MARuniva
TSPE DTPE
LPE EMMI
FC
15
17
19
21
23
25
27
29
31
33
35
0153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
E) IMuniva
TSPE DTPE
LPE EMMI
FC
15
17
19
21
23
25
27
29
0153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
B) MCARunifo
TSPE DTPE
LPE EMMI
FC
15
17
19
21
23
25
27
29
31
0153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
D) MARunifo
TSPE DTPE
LPE EMMI
FC
15
17
19
21
23
25
27
29
31
33
35
0 153050
ERROR RATE (%)
% OF MISSING VALUES IN TEST DATA
F) IMunifo
TSPE DTPE
LPE EMMI
FC
Classifying Incomplete Vectors using Decision Trees
461

averaged over the 21 datasets. From Figure 3A, both
EMMI and LPE are more robust to MCARuniva data
while TSPE shows more deterioration in performance
with an increasing amount of missing data. Figure 3B
presents error rates of methods for MCARunifo data
which are similar to results for the MCARuniva suite.
The results in Figure 3C show TSPE as more
effective as a method for handling MARuniva data
than MCARuniva data. Results for MARunifo data
shows a similar pattern of results to the one observed
for MCARunifo data (Figure 3D).
The results in Figure 3E show poor performances
by TSPE and DTPE for IMuniva data. It can be seen
from Figure 3F that results yielded by methods for
IMunifo data are identical to results achieved by
methods for MARunifo data.
The results for the proportion of missing values in
the test set shows increases in missing data
proportions being associated with increases in error
rates with the methods performing better when
missing values are in all attributes than one. The
results show IM values entailing serious deterioration
in prediction accuracy compared with MCAR and
MAR. Overall, the methods performed better when
data was MCAR.
It seems that the overall performance of LPE is
rather effective on average compared with TSPE and
DTPE, and also gives EMMI serious competition.
The difference between the two methods (EMMI and
LPE) was found to be not significant at the 1% level.
This is the case for all the three missing data
mechanisms. The slightly better performance of
DTPE compared with TSPE in some situations,
especially at higher levels of missing values, is rather
surprising. This is because for this technique the
probabilities are not estimated in the correct way but
by using the information given on the tree.
Due to the superior performance comparability of
LPE and EMMI, we now present the trade-offs
between the computational cost and the accuracy of
all the five methods.
Table 1: Computational cost of current and new methods.
Method Smoothed
error rate
Time computation (s)
TSPE 34.8 30.376
DTPE 33.6 34.173
LPE 25.3 39.321
FC 27.1 41.368
EMMI 24.9 47.289
After an optimization process of the precision
obtained and the computational time required in the
computational calculations, highly precise results
were achieved for LPE compared to the EMMI and
FC while requiring the least amount of time possible.
However, DTPE has the smallest overall
computational time, followed by TSPE (Table 1).
4 REMARKS AND
CONCLUSIONS
Our main contribution is the development of a
probabilistic estimation algorithm for the
classification of incomplete data. By making a couple
of mild assumptions, the proposed approach solves
the incomplete data problem in a principled manner,
avoiding the normal imputation heuristics.
It appears that the main determining factor for
missing values techniques, especially for smaller
percentages of missing values, is the missing data
mechanism. However, as the proportion of missing
values increases, the distribution of missing values
among attributes becomes very important and the
differences in performance by the MDTs begin to
show.
The comparison with current methods also
yielded a few interesting results. The experiments
showed all the techniques performing well in the
presence of MCAR data compared with MAR data.
These results are in support with statistical theory and
to our prior results reported in Rubin and Little
(1987). Also, it was not surprising that all the
techniques struggled with IM data (which is always a
difficult assumption to deal with).
Poor performances by DTPE and TSPE are
observed with superior (comparable) performances
by LPE and MI. The strength of LPE lies in its ability
of not repeating the same process of determining the
probabilities whenever a new instance that needs to
be classified comes along (i.e., it uses the already
available information to predict the class of that new
instance). This saves a lot of computational time,
which is one of the main strengths of this technique.
Besides, LPE does not make representational
assumptions or pre-supposes other model constraints
like MI. Therefore, it is suitable for a wide variety of
datasets.
Several exciting directions exist for future
research. One topic deserving future study would be
to assess the impact of missing values when they
occur in both the training and testing (classification)
sets. Also, so far we have restricted our experiments
to only tree-based models. It would be interesting to
carry out a comparative study of tree-based models
with other (non-tree) methods such as neural
networks or naïve Bayes classifier.
NCTA 2020 - 12th International Conference on Neural Computation Theory and Applications
462

LPE was also applied to twenty-one real-world
datasets. This work could be extended by considering
a more detailed simulation study using much more
balanced types of datasets required to understand the
merits of LPE, especially larger datasets.
In sum, this paper provides the beginnings of a
better understanding of the relative strengths and
weaknesses of MDTs and using DTs as their
component classifier. It is hoped that it will motivate
future theoretical and empirical investigations into
incomplete data and DTs, and perhaps reassure those
who are uneasy regarding the use of non-imputed data
in prediction.
ACKNOWLEDGEMENTS
The work was funded by the Faculty of Engineering
and the Built Environment at the Durban University
of Technology. The authors would like to thank Chris
Jones for his helpful useful comments.
REFERENCES
Agresti, A. (1990). Categorical Data Analysis. New York:
John Wiley.
Breiman, L., Friedman, J., Olshen, R., and Stone, C. (1984).
Classification and Regression Trees, Wadsworth.
Cestnik, B., Kononenko, I. and Bratko, I. (1987). Assistant
86 a knowledge-elicitation tool for sophisticated users.
In I. Bratko and N. Lavrac, editors, European Working
Session on Learning – EWSL87. Sigma Press,
Wilmslow, England, 1987.
Cheeseman, P., Kelly, J., Self, M., Stutz, J., Taylor, W., and
Freeman, D. (1988). Bayesian Classification. In
Proceedings of American Association of Artificial
Intelligence (AAAI), Morgan Kaufmann Publishers:
San Meteo, CA, 607-611.
Dempster, A.P., Laird, N.M., and Rubin, D.B. (1977).
Maximum likelihood estimation from incomplete data
via the EM algorithm. Journal of the Royal Statistical
Society, Series B, 39, 1-38.
Hosmer, D.W. and Lameshow, S. (1989). Applied Logistic
Regression. New York: Wiley.
Khosravi, P., Vergari, A., Choi, YJ. and Liang, Y. (2020).
Handling Missing Data in Decision Trees: A
Probabilistic Approach.. https://arxiv.org/pdf/
2006.16341.pdf (Accessed on 16 September 2020)
Lakshminarayan, K., Harp, S.A., and Samad, T. (1999).
Imputation of Missing Data in Industrial Databases.
Applied Intelligence, 11, 259-275.
Little, R.J.A. and Rubin, D.B. (1987). Statistical Analysis
with missing data. New York: Wiley.
Long, J.S. (1998). Regression Models for Categorical and
Limited Dependent Variables. Advanced Quantitative
Techniques in the Social Sciences Number 7. Sage
Publications: Thousand Oaks CA.
McCullagh, P. and Nelder, J.A. (1990). Generalised Linear
Models, 2nd Edition, Chapman and Hall, London,
England.
MULTIPLE IMPUTATION SOFTWARE. Available from
<http:/www.stat.psu.edu/jls/misoftwa.html,
http:/methcenter.psu.edu/EMCOV.html>
Murphy, P. and Aha, D. (1992). UCI Repository of machine
learning databases [Machine-readable data repository].
The University of California, Department of
Information and Computer Science, Irvine, CA.
Quinlan, J.R. (1985). Decision trees and multi-level
attributes. Machine Intelligence. Vol. 11, (Eds.). J.
Hayes and D. Michie. Chichester England: Ellis
Horwood.
Quinlan, JR. (1993). C.4.5: Programs for machine
learning. Los Altos, California: Morgan Kauffman
Publishers, INC.
Rubin, D.B. (1987). Multiple Imputation for Nonresponse
in Surveys. New York: John Wiley and Sons.
Rubin, D.B. (1996). Multiple Imputation After 18+ Years.
Journal of the American Statistical Association, 91,
473-489.
Schafer, J.L. (1997). Analysis of Incomplete Multivariate
Data. Chapman and Hall, London.
Schafer, J.L. AND GRAHAM, J.W. (2002). Missing data:
Our view of the state of the art.
Psychological Methods,
7 (2), 147-177.
Tanner, M.A. AND WONG, W.H. (1987). The Calculation
of Posterior Distributions by Data Augmentation (with
discussion). Journal of the American Statistical
Association, 82, 528-550
Twala, B. (2005). Effective Techniques for Handling
Incomplete Data Using Decision Trees. Unpublished
PhD thesis, Open University, Milton Keynes, UK
Twala, B., Jones, M.C. and Hand, D.J. (2008). Good
methods for coping with missing data in decision trees.
Pattern Recognition Letters, 29, 950-956.
Twala, B and Cartwright, M. (2005). Ensemble Imputation
Methods for Missing Software Engineering Data. 11
th
IEEE Intl. Metrics Symp., Como, Italy, 19-22
September 2005.
Twala, B., Cartwright, M., and Shepperd, M. (2005).
Comparison of Various Methods for Handling
Incomplete Data in Software Engineering Databases.
4
th
International Symposium on Empirical Software
Engineering, Noosa Heads, Australia, November 2005.
Wu, C.F.J. (1983). On the convergence of the EM
algorithm. The Annals of Statistics, 11, 95-103.
Zhang, X., Yining, W., Jiahui, H., and Chen, Y. (2020).
Predicting Missing Values in Medical Data via
XGBoost Regression. Journal of Healthcare
Information Research. https://doi.org/10.1007/s41666-
020-00077-1 (accessed 16 September 2020).
Classifying Incomplete Vectors using Decision Trees
463
