
Development of a Test Environment for the Evaluation of
Human-Technology Interaction in Cockpits of Highly-Automated
Vehicles
Patrick Schn
¨
oll
Institute for Media Technology, University of Technology Ilmenau, Germany
Keywords:
Automated Driving, Automation, Driver Take-over Task, Driving Simulator, Human-machine Interaction,
Human-technology Interaction, Interface Design, Take-over Request, Test Environment, Test Setup.
Abstract:
This paper presents a technologically independent framework to describe test environments suitable for the
examination of the driver take-over task present in highly-automated vehicles. As part of a structural analysis,
typical influencing factors and parameters defining the driver take-over task are discussed. According to litera-
ture, existing studies examining the driver take-over task make use of various test environments. However, the
comparability of their results is not given without a detailed understanding of these. Hence, based on estab-
lished literature, a technologically independent framework has been developed which can be used to describe
the distinct test environments. It turned out, that the referenced models had to be partially restructured in order
to be suitable for the description of such test environments. The focus of the present paper lies on their techni-
cal implementation characterized by stimulus materials, which have been holistically examined for the driver
take-over task. Since stimulus materials provide the foundation of a specification of test environments, this
work presents an initial step towards a test specification aiming on making results obtained from examinations
of the driver take-over task comparable.
1 INTRODUCTION
The degree of automation in the field of automo-
tive is steadily increasing. Highly-automated driving
is associated with a more comfortable and produc-
tive driving experience, allowing drivers and passen-
gers to perform a variety of non-driving related tasks
(NDRT).
From the perspective of the commercial vehicle
market, high automation degrees have the potential
to optimize the utilization by allowing professional
drivers to meet their rest times during transit which re-
sults in flexibility regarding driving schedules. Hence
both, private end-users as well as commercial cus-
tomers can profit from this trend.
However, as of now, there is no vehicle automa-
tion system in high volume production, which is ca-
pable of fulfilling all requirements of a L5 system per
(SAE International, 2018). Such systems shall have
an unlimited operational design domain, meaning that
they shall be able to reach a defined target point from
a defined starting point anywhere in the world while
incorporating redundancy as part of the automation
system. As long as systems capable of this are still
in development, the driving task as a whole is semi-
automated while the level of automation steadily in-
creases with advancing developments in the field of
vehicle automation.
Therefore, in the near future, at least a small share
of the total distance traveled in a vehicle equipped
with an automation system will be driven manually.
Typically, this affects the passage of the ’first-mile’
and the ’last-mile’, respectively the start of the drive
(e.g. from parking lot to highway) as well as the end
of the drive (e.g. from highway to parking lot).
Hence, in such cases, at minimum one transition
from the driver to the automation system (hand-over)
and vice-versa (take-over) is required. In order to ex-
ecute these hand-over and take-over tasks, a human-
technology interface, which must provide a safe tran-
sition into and out of the automation loop for the
driver, is required.
Depending on the share the driver is actively ma-
neuvering the vehicle compared to the automation
function having control, different requirements for in-
put and output devices arise. Due to the ongoing ad-
vancement of technology, there is a wide variety of
solutions available, from traditional cockpit designs
64
Schnöll, P.
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles.
DOI: 10.5220/0010144900640073
In Proceedings of the 4th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2020), pages 64-73
ISBN: 978-989-758-480-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
with head-up displays up to advanced technologies
like, among others, e.g. wind-shield displays and aug-
mented reality devices.
In order to implement these technologies into au-
tomotive cockpits, they have to be assessed and tested
for their suitability. This process requires extensive
testing and evaluation, whereas at the same time, the
solution space for a cockpit design is increasing sig-
nificantly.
2 RELATED WORK
2.1 Description of Driving Tasks
Hierarchy of the Driving Task. The hierarchy of
the driving task gives a subdivision into the execution
of primary, secondary and tertiary tasks based on their
contextual proximity to and relevance for the fulfill-
ment of the actual transport task (Bubb et al., 2015;
Winner et al., 2015).
The underlying human performance when execut-
ing such tasks can be described based on the skill-,
rule- and knowledge-based behavior (Rasmussen,
1983) whereas the driving task itself can be catego-
rized into a navigation-, guidance- and stabilization
task (Donges, 1982).
These models can be linked to each other content-
wise in order to describe the driver’s task execution
during driving (Winner et al., 2015).
Non-driving Related Tasks. The categorization of
the driver’s tasks refers to the content-related proxim-
ity of the respective tasks to the actual driving task,
whereas the primary tasks are closest to the actual
driving task in terms of content.
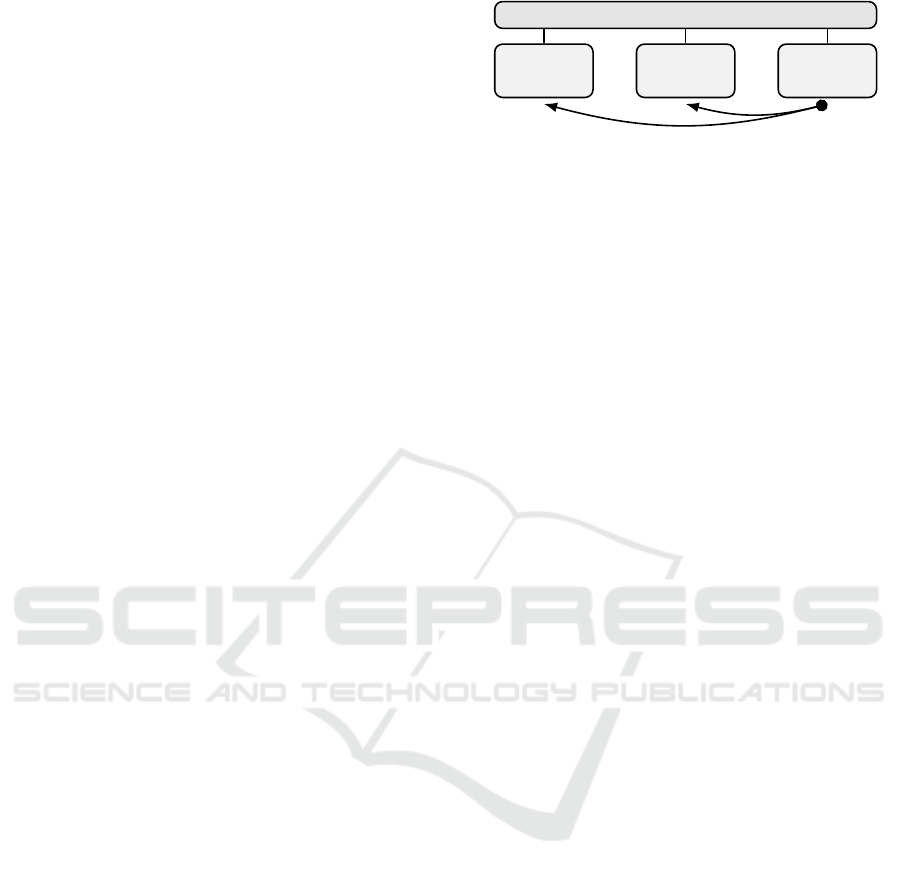
One of the main benefits of highly-automated
driving is the potential of the driver focusing on non-
driving related (cf. tertiary) tasks while the vehicle is
in motion (Naujoks et al., 2017). Hence, automation
functions must support a fast and safe transition from
the execution of those non-driving related, tertiary
tasks to the execution of primary (Othersen, 2016)
and secondary tasks, as illustrated in Figure 1.
This paper focuses on the examination of the
driver take-over task representing the responsibility
shift between the automation system and the human
driver.
2.2 Driver Take-over Task
Definition. The driver shifting from an
’out-of-the-loop’-state, often being engaged in
DRIVING TASKS
Secondary
Task(s)
Primary
Task(s)
Tertiary
Task(s)
Driver Take-Over Task
Figure 1: Illustration of the driver take-over task with re-
spect to the hierarchy of the driving task following on from
(Bubb et al., 2015; Winner et al., 2015).
tertiary tasks, to having manual control over the ve-
hicle is commonly referred to as the driver take-over
task. It is triggered through a driver take-over request
(TOR) when initiated by the automation system.
The driver take-over task represents the responsi-
bility shift from the automation system to the driver
being handled through a human-technology interface.
Defining Parameters. Based on (Eriksson and
Stanton, 2017), the driver take-over task can be de-
scribed by two distinct time intervals: the take-over
request lead time TOR
lt
, giving the time interval re-
maining until the take-over has to be performed, as
well as the take-over reaction time TO
rt
, the actual
time span of the take-over task itself. The examina-
tion of (Eriksson and Stanton, 2017) shows that TOR
lt
and TO
rt
positively correlate.
Influencing Factors. The completion of the driver
take-over task takes significantly longer if the
driver has to return to the driving task from being
’out-of-the-loop’ (Merat et al., 2014). Hence, (Banks
and Stanton, 2016) suggest to keep the driver engaged
in secondary tasks, making the driver an ’active super-
visor’ of the automation system.
(Wu et al., 2020) indicate, that although the driv-
ing duration has a significant effect on the drowsiness
level, it has no effect on the take-over performance.
However, they have shown that the take-over perfor-
mance is reduced with increasing drowsiness.
Another factor when dealing with automation sys-
tems is mode awareness, meaning that the driver must
be aware which portions of the system are presently
automated and which have to be manually controlled.
If this is not clear to the driver, this is called mode
confusion, which is subject to ongoing research re-
garding automotive interface design (Neuhuber et al.,
2020; Pretto et al., 2020).
Furthermore, the behavior of drivers is influenced
by their subjective interpretation of the functionali-
ties implemented in the automation function as well
as their characteristics, commonly referred to as the
driver’s mental model.
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles
65
(Neuhuber et al., 2020) indicate a correlation be-
tween age and mode confusion, mental models as well
as general difficulties with interaction with automa-
tion systems. Hence, they conclude that the age of the
driver has a significant influence on the way driver as-
sistance systems are used and that state-of-the-art sys-
tems may not be easily used by all groups of drivers.
(Bundesanstalt f
¨
ur Straßenwesen, 2012) lists per-
sonal characteristics, which have an influence on driv-
ing behavior with the focus on young drivers. How-
ever, the categorization can be transferred to all age
groups in order to give a qualitative, extensive im-
pression of personal factors which have to be con-
sidered when evaluating test environments for highly-
automated driving.
Table 1 lists personal factors which have an in-
fluence on driving behavior based on (Bundesanstalt
f
¨
ur Straßenwesen, 2012). Corresponding to (Bunde-
sanstalt f
¨
ur Straßenwesen, 2012), the listed personal
factors are structured into stable and variable charac-
teristics. Stable characteristics contain, among oth-
ers, sociodemographic aspects, cognitive skills, expe-
rience as well as personal characteristics and are not
changed frequently.
Contrary to this, variable characteristics, such as
fitness to drive, and the current emotional state are
subject to a frequent change, which may happen even
multiple times per day.
Take-over Times. (Eriksson et al., 2017) compared
driver hand-overs to and driver take-overs from the au-
tomation system in vehicles on public roads to driving
simulators. They found that the transitions between
the driver and the automation system happened gen-
erally faster when driving on public roads compared
to simulated environments.
Furthermore, (Eriksson and Stanton, 2017) have
compared various publications examining the take-
over task. Their results show, that the average time
needed for a successful take-over request differs in lit-
erature. Therefore, making a generic statement about
’typical’ take-over times is difficult based on the avail-
able studies.
Comparability of Test Environments. Besides the
potential differences in research methods and designs
used in the studies, as referenced by (Eriksson and
Stanton, 2017), the respective test environment itself
as well as their technical implementation may have an
influence on the performance of the test person during
task execution.
In order to substantiate this hypothesis, the influ-
ences on the driver take-over task examined in dis-
tinct test environments by different test persons and
Table 1: Personal factors influencing driver behavior (Bun-
desanstalt f
¨
ur Straßenwesen, 2012).
Personal Factors
Stable Characteristics
Sociodemographic aspects
• Age
• Gender
Socioeconomic status
Mobility-related attributes
• Driving suitability
• Driving competence
Cognitive skills
• Perception of risk / danger
• Concentration and attention
• Assessment of own abilities
Schemes
Experience
• Mileage
• Level of practice
• Frequency of driving
Motives, attitudes and expectations
Personal characteristics
Diseases
Variable Characteristics
Fitness to drive
Information processing (e.g. attention control)
Emotions and sensitivities
Diseases
Subjective safety
Subjective task difficulty
their effects must be understood in detail to be able to
compare studies being performed in varying test en-
vironments and explain potential deviations.
This whitespot gives the motivation of a detailed
examination of the comparability of test environments
used for human-centered studies in the field of auto-
motive cockpit design.
Hence, this paper aims on presenting an approach
to a framework providing a guideline to analytically
describe a test environment for highly-automated
driving along with typical personal influence factors
on the respective test persons.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
66
2.3 Test Environments for the Driver
Take-over Task
2.3.1 State-of-the-Art
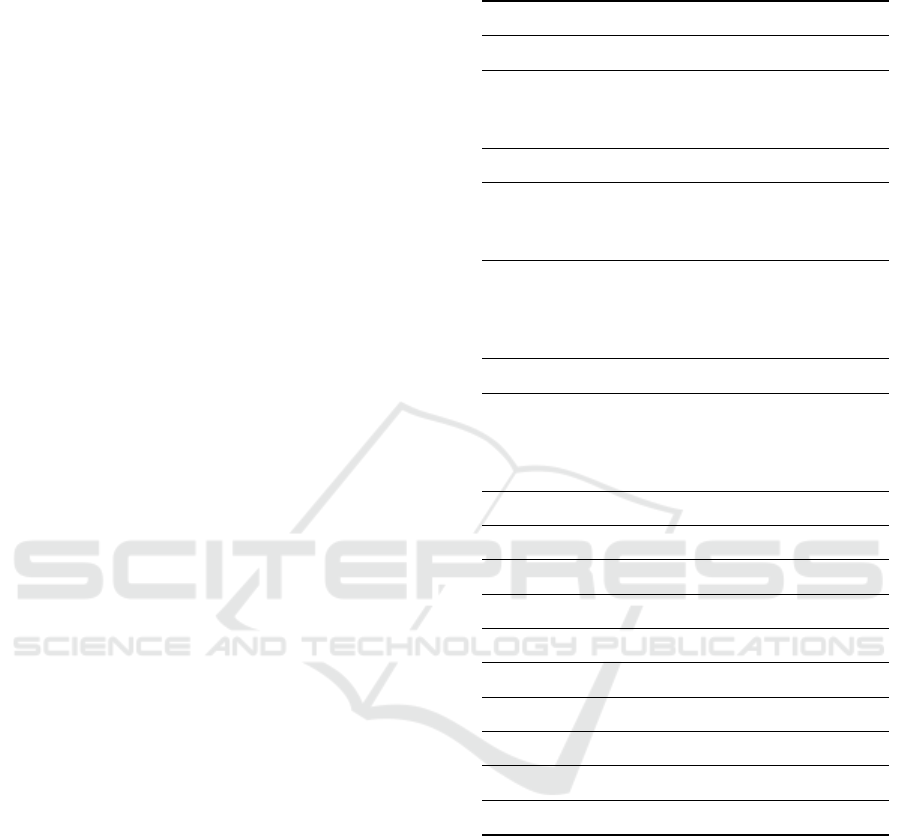
Table 2 shows a categorization of test environments
being used to examine driver behavior and human
performance from a vehicle driving on public roads
1 to laboratory setups 2 - 8 . The test environ-
ments have been exemplary arranged based on avail-
able stimulus materials.
Immersion & Presence. Depending on the effort
put into building up a test environment, different lev-
els of presence perceived by the test person can be
achieved, which is especially important in laboratory
test environments such as 2 - 8 .
Immersion, as a prerequisite of presence (Schwind
et al., 2019; Witmer and Singer, 1998), can be reached
by the artificial environment matching the user’s ex-
pectations, being influenced by the user’s actions as
well as being consistent with regard to its conventions
(McMahan, 2003). Hence, stimulus material is an in-
tegral aspect for immersion.
Typically, test setups used in literature consist of
a narrowed down version of a vehicle cockpit, at least
incorporating gas- and brake pedals as well as a steer-
ing wheel. The implementation efforts being invested
in these depend on the respective research questions
being examined and vary widely (cf. Table 2).
Therefore, due to their conceptual differences,
results obtained from studies performed in varying
test environments can only be compared very selec-
tively and if the test environment, test design and test
method has been described in detail.
However, as soon as a study is performed in a lab-
oratory test environment, such as
2 - 8 , the influ-
ence of the perceived presence of the test person on
the result of the examination has to be considered.
2.3.2 Analytical Description
In order to create a common baseline supporting the
comparison of results obtained with differentiating
test environments, they have to be described holisti-
cally on a generic level.
The established ’framework for analyzing the ef-
fects of tasks’ of (Hackman, 1969) has been chosen as
the foundation for this analysis because of its strong
relation to stimulus material.
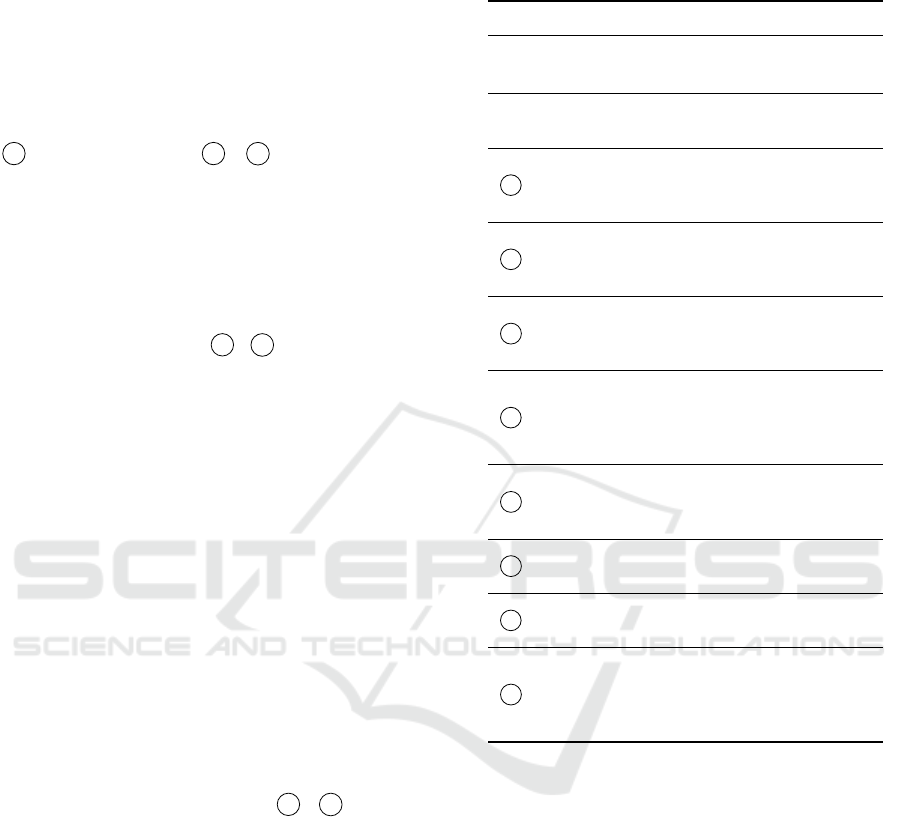
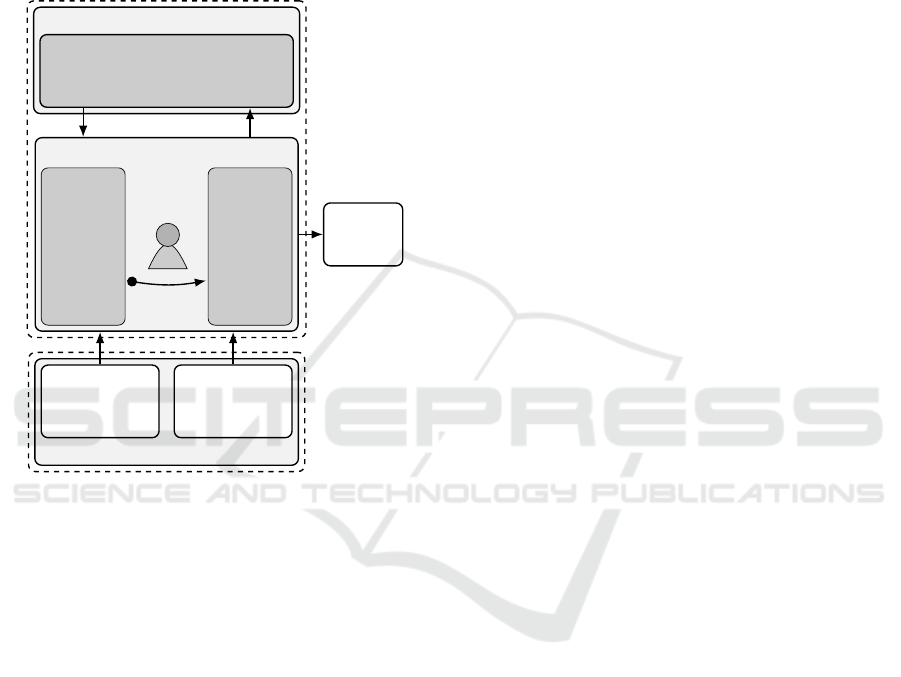
Figure 2 shows an illustration of a generic test en-
vironment suitable for an examination of the driver
take-over task based on (Hackman, 1969) and is dis-
cussed in the following.
Table 2: Test environments being used to examine driver
behavior and human performance.
Test Environments
Exemplary arranged in descending
order based on available stimulus materials
Description
Exemplary
Implementation
1
Vehicle on public roads
/ test track
(Banks et al.,
2018; Eriksson
et al., 2017)
2
Dynamic driving
simulator with screen
projection (VR CAVE)
(Sch
¨
omig et al.,
2015; Jamson
et al., 2013)
3
Dynamic driving
simulator with VR
headset
(Hartfiel et al.,
2019)
4
Static vehicle with
screen simulation
(Petermeijer
et al., 2017;
Larsson et al.,
2015)
5
Static simulation with
screen projection (VR
CAVE)
(K
¨
ohn et al.,
2019)
6
Static simulation with
multiple displays
(Li et al., 2019)
7
Static simulation with
VR headset
(Walch et al.,
2017)
8
Static screen
simulation with
minimal input device
set
(Capallera et al.,
2019)
The objective task input is characterized by stim-
ulus materials, instructions about operations as well
as instructions about goals. It is subjectively rede-
fined by the test person resulting in the redefined task
input, whereas this redefinition is influenced by per-
sonal factors (cf. Table 1).
Following (Hackman, 1969), based on the rede-
fined task input, the test person formulates hypothe-
ses on how to approach the given task best in order to
achieve maximum success. The hypothetical actions
required are executed in the process step and result
in a trial outcome. The process outcome links give a
causal link between performed actions and outcomes.
The evaluation of the performed process can ei-
ther happen on system or personal side. If the pre-
ceding process execution did not lead to a satisfying
outcome, new hypotheses are formed and another it-
eration is carried out in order to receive a new trial
outcome which can be evaluated.
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles
67
Stimulus
Materials
Instructions
About
Operations
Instructions
About
Goals
Objective
Task Input
Redefined
Stimulus
Materials
Redefined
Instructions
About
Operations
Redefined
Instructions
About
Goals
Redefined
Task Input
Hypotheses
Process
Trial
Outcome
Final
Outcome
Process
Outcome
Links
System
Evaluation
Personal
Evaluation
Test
Person
Personal Factors
1 Understanding of Task
2 Acceptance of Task
3 Idiosyncratic Needs, Values, etc.
4 Previous Experience with Similar Tasks
5 Ability
6 Performance Motivation
7 Level of Arousal
∆
Error(s)
Figure 2: Illustration of a generic test environment suitable for an examination of the driver take-over task based on (Hackman,
1969).
If the evaluation of the trial outcome turns out pos-
itive, the result of the last performed process gives the
final outcome.
The objective task input as well as the final out-
come are factors extrinsically defined or evaluated by
third parties such as the research team.
The potential difference between the objective
task input and the final outcome can be assessed and
connected to errors of the test person or systematic
errors of the technological implementation of the test
environment itself and represents the individual per-
formance of each test person.
3 RESEARCH QUESTION,
DESIGN AND METHOD
As discussed in Section 2.2, (Eriksson and Stanton,
2017) reference various studies examining the driver
take-over task. However, comparing the results of
these studies is difficult due to the varying test en-
vironments, -methods and -designs being used.
The first step towards a qualitative comparability
of these studies is the understanding of the distinct
characteristics of the used test environments. Hence,
a generic, common basis for a specification of these is
required.
3.1 Research Question
An essential characteristic of the common basis for
such test environments is the technical implementa-
tion required to execute a driver take-over task. This
leads to the following research question:
Which stimulus materials are required for the ex-
ecution of the driver take-over task?
3.2 Research Design
The research question is answered by deriving the
technical implementation for a test environment suit-
able for the examination of the driver take-over task
from its structured analytical description.
3.3 Research Method
Established models have been applied to analyze typ-
ical test environments for highly-automated driving
used for the examination of the driver take-over task.
Based on this, the intention was to be able to holis-
tically describe the driver take-over task considering
the respective test environment the task is performed
in.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
68
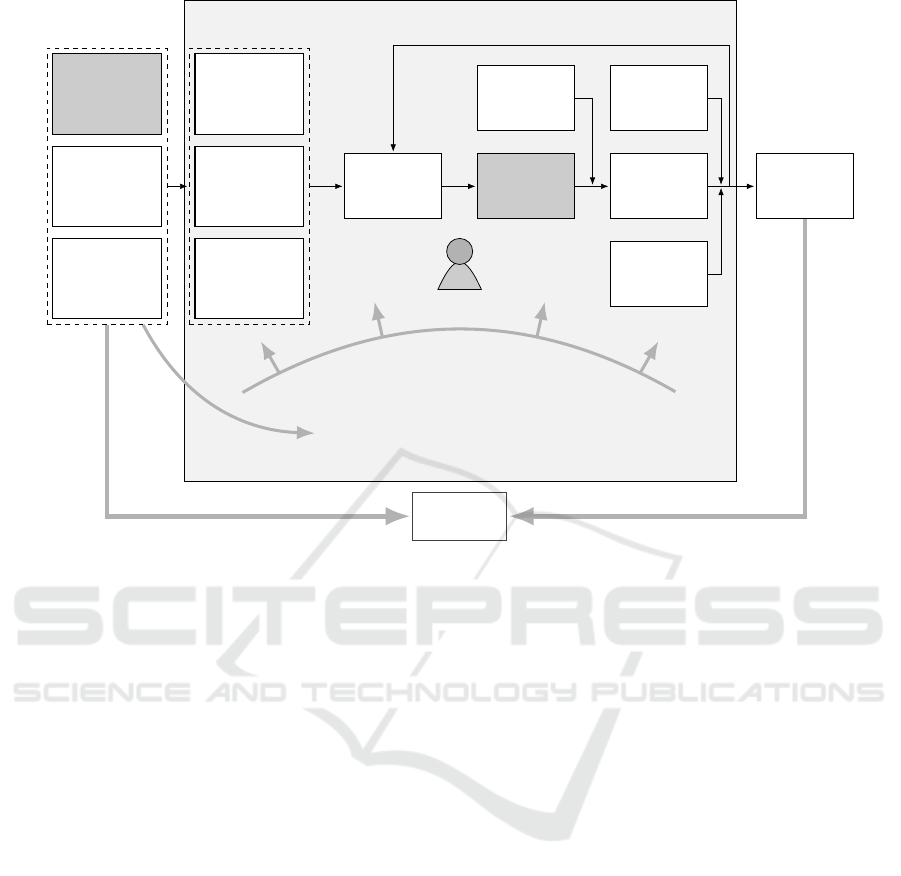
4 RESEARCH RESULTS
As part of the analysis, the hierarchy of the driving
task (Winner et al., 2015; Bubb et al., 2015) as well
as the framework of (Hackman, 1969) (cf. Figure 2)
have been merged into a common context, shown in
Figure 3.
Focus on
Primary /
Secondary
Task(s)
Manual
Driving
Mode
Focus on
Tertiary
Task(s)
Automated
Driving
Mode
Stimulus Materials
Instructions
About
Goals
Instructions
About
Operations
TECHNICAL IMPLEMENTATION
PROCESS
DRIVER TAKE-OVER TASK
Final
Outcome
TEST PERSON
TEST ENVIRONMENT
TEST METHOD / -DESIGN
Figure 3: Illustration of a test environment suitable for the
examination of the driver take-over task following on from
(Hackman, 1969; Winner et al., 2015; Bubb et al., 2015).
As shown in Figure 3, the driver take-over task is
performed by a test person inside a test environment
as part of the process step (cf. Figure 2). It is charac-
terized by a transition of responsibilities when shift-
ing from the automated to the manual driving mode.
The test person’s focus typically lies on tertiary tasks
during the automated driving mode whereas a fast
transition to primary and secondary tasks has to be
conducted during the driver take-over task, as already
indicated in Figure 1.
Contrary to (Hackman, 1969), who aggregates
stimulus materials, instructions about operations and
instructions about goals as the ’objective task input’
(cf. Figure 2), in the context of a test environment
suitable for the examination of the driver take-over
task, these can be separated into two distinctive com-
ponents.
As illustrated in Figure 3, a test environment can
be described through its technical implementation as
well as the underlying process to be executed. The
process is specified by the stimulus materials, the in-
structions about operations and the instructions about
goals which are communicated to the test person.
The instructions about operations and the instructions
about goals depend on the test method and -design
and thus are closely related to the research question
in scope of the respective examination.
As shown in Figure 3, the technical implementa-
tion must provide stimulus materials allowing an in-
teraction of the test person during the process execu-
tion (cf. Figure 2).
Moreover, the stimulus materials serve as an input
for the evaluation of the quality of the trial outcome
in order for the test person to accept a trial outcome
as the final outcome.
Stimulus Materials. The task qua task approach
outlined by (Hackman, 1969; McGrath and Altman,
1966) provides a suitable analytical foundation for the
specification of a technical system implementation of
a test environment due to its close relationship to ac-
tual physical signals (Hackman, 1969).
Hence, it has been chosen to describe the stimulus
materials being part of the technical implementation
required to perform the driver take-over task in a test
environment.
The stimulus materials listed in Table 3 are struc-
tured into categories referring to the ego vehicle,
the static environment, the dynamic environment, the
drivable space, the traffic as well as the weather at the
time the driver take-over request is initiated.
As illustrated in Figure 3, a subset of stimulus ma-
terials, typically related to the ego vehicle, are subject
to an active interaction by the test person as part of the
process execution (cf. Figure 2-3) during the driver
take-over task.
Table 4 gives an overview about these and lists the
respective processes on a high level.
5 CRITICAL ANALYSIS
This work pursues the idea of creating a common ba-
sis for the specification of test environments for auto-
motive cockpit designs in highly-automated vehicles.
The results aim to be applicable to a wide vari-
ety of driving tasks and test environments. The driver
take-over task has been exemplary selected as a repre-
sentative task being present in highly-automated driv-
ing due to its safety relevance and complexity. In or-
der to get confidence in the generic suitability of this
approach, additional work tasks must be described ac-
cording to the introduced framework.
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles
69

Table 3: Stimulus materials for a technical implementation of a test environment suitable for the examination of the driver
take-over task.
Ego vehicle — Vehicle the test person is located in
Intended destination Waypoint(s)
For each:
• Latitude / longitude, alternatively:
• Relative position to the next waypoint
Planned path
Vehicle dynamics Velocity (x, y, z) • Velocity in [x- / y- / z-] directions
Acceleration (x, y, z) • Acceleration in [x- / y- / z-] directions
Vehicle speed • Vehicle speed signal
Heading • [Heading / steering / steering wheel] angle
Dynamic behavior • Articulation point(s)
• Physically possible max. velocity and accelerations
• Slip
Location Position • Latitude / longitude, alternatively:
• Relative position with regard to the road
Geometry Type • [Car / van / pickup truck / truck / bus / tractor / other]
Size • Length / width / height
State Status • System ’health’, automation system state, active gear, lights, etc.
Errors • System faults
Static environment
Static obstacles Position • Latitude / longitude, alternatively:
• Relative position with regard to the road
Type • [Road boundary / construction site]
• [Road user in standstill / lost cargo / other]
Size • Length / width / height
Passability • Passability signal
Dynamic environment
Other road users
• Vehicle dynamics
• Geometry
• Position
• See ’Ego vehicle’ section
Non-road users
Drivable space
Drivable space Road material • [Asphalt / gravel / sand / dirt / ice / snow], opt. surface condition
Road information • Curvature / road boundary position / no. of lanes / lane markings
Traffic
Traffic Traffic rules • Local traffic rules, e.g. [left-hand / right-hand] traffic
Traffic characteristics • e.g. Traffic [flow / density / jam], [maximum / mean] speed
Weather
Weather Precipitation • [Rain / ice pellets / snow]
Light • [Dawn / day / twilight / night / direct sunlight / clouds / fog]
Meteorological data • Temperature / humidity / etc.
Visual range Visual range • Resulting from e.g. light, precipitation, meteorological data
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
70
Table 4: Stimulus materials being actively influenced by the
test person as part of the process execution (cf. Figure 2-3)
during the driver take-over task.
Process (cf. Figure 2)
Stimulus
Material
Control the
ego velocity
Control the
gas pedal
• Acceleration
Control the
brake pedal
• (Negative)
Acceleration
Control the
ego heading
Control the
steering
wheel angle
• Heading
Control the
signaling
equipment
Control the
indicator(s)
• Lights
End the
automation
Confirm the
take-over
• Automation
system state
Furthermore, the amount of potential use-cases,
scenarios, environmental conditions and personal fac-
tors influencing the driver take-over task lead to a
large number of different variations. Hence, the pre-
sented tables, figures, lists and examples do not claim
to be exhaustive.
However, the presented approach can support the
comparability of studies by providing an initial but
important step towards a documentation guideline for
studies investigating human performance in driver
take-over situations.
The presented approach was developed through
analytical research. To prove its suitability, it should
be applied to further test environments and studies ex-
amining the driver take-over task.
The content of this paper covers the description
of the technical implementation of a test environ-
ment. The instructions about operations and the in-
structions about goals, which depend on the respec-
tive test method and -design, closely related to the
research question in scope, have to be assessed sep-
arately.
6 CONCLUSIONS
6.1 Summary
In order to be able to compare studies examining
the driver take-over task using differentiating test se-
tups, a common descriptive basis is required to under-
stand their coinciding results and potential deviations.
Therefore, this paper presents a technologically inde-
pendent description of test environments in the field
of highly-automated driving based on established re-
search models and literature. It can be used likewise
for the analysis of existing test environments as well
as for the definition of requirements for new test en-
vironments to be build up.
The analysis has shown that a test environment
is influenced by two major components: the techni-
cal implementation as well as the test method and
-design (cf. Figure 3). The test environment contains
aspects being subjectively influenced by the test per-
son, such as the execution process of the task itself
(cf. Figure 2). The technical implementation consists
of stimulus materials which represent interaction with
the process.
The test environment can be used to examine the
research question in scope along with the test method
and -design. These are derived based on the research
question and contain instructions about operations
as well as instructions about goals (cf. Figure 2-3,
(Hackman, 1969)).
The presented analysis focused on the identifica-
tion of necessary requirements for the technical im-
plementation of a test environment suitable for exam-
ining the driver take-over task. The specification for
stimulus materials for such test environments is given
in Table 3, while those being actively influenced by
the test person during the driver take-over task are
highlighted in Table 4 respectively.
As Table 3 shows, various stimulus materials must
be made available to the test person due to their in-
fluence on the situation interpretation and hypothesis
selection of the driver when performing the take-over
task (cf. Figure 2-3).
6.2 Discussion
Although the structural analysis presented in this pa-
per builds on (Hackman, 1969), it turned out to be
more suitable to describe test environments by sep-
arating stimulus materials, instructions about oper-
ations and instructions about goals into a compo-
nent with technical relation (technical implementa-
tion) as well as another component with relation to
the test method and -design used for the examination.
Hence, the objective task input, as it was introduced
by (Hackman, 1969), can be subdivided further for
this application.
However, the redefined task input, as it is de-
scribed by (Hackman, 1969), is part of the test envi-
ronment since it is influenced by the test person’s per-
sonal factors which corresponds to (Hackman, 1969)
and gives an input to the process (cf. Figure 2).
The presented approach is meant to create aware-
ness for the multitude of factors and stimulus materi-
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles
71

als, which have to be considered when conducting an
examination related to the driver take-over task. This
is especially relevant for studies being conducted in
laboratory test environments (cf. Table 2). However,
the discussed aspects similarly apply to other driving
tasks.
To achieve comparability of the available stud-
ies examining the driver take-over task, researchers
should describe the stimulus materials provided to the
test person in the respective studies in detail in order
to support a comprehensive interpretation of their re-
sults. Therefore, especially when publishing results
obtained from using laboratory test environments, it is
recommended not only to describe the technical setup
itself, respectively how certain stimuli have been pro-
vided, but additionally provide details on why it has
been decided to tailor certain stimuli compared to
driving in a vehicle on public roads, if applicable.
Hence, this sets new demands on the documenta-
tion of studies conducted in this field.
6.3 Outlook
In a subsequent analysis, instructions about opera-
tions and instructions about goals provided to the test
person as part of the test method and -design have to
be examined in order to holistically understand poten-
tial influencing factors on the driver take-over task.
The differences between the objective task input
and the final outcome, as introduced in Figure 2 as er-
rors, can be categorized based on human error models
available in literature, which supports the understand-
ing of human interaction with automated driving sys-
tems. The ability to understand the origin of human
errors during the driver take-over task is essential dur-
ing the design phase of human-machine interfaces for
the driver take-over task.
Furthermore, the proposed models should be im-
plemented in existing studies in order to prove their
suitability. Following on from this, a generic guide-
line can be developed, which supports the planning,
execution and evaluation phase of studies.
To continue working on this aspect, a test specifi-
cation containing a common set of criteria, descriptive
categories and boundary conditions can be developed.
This can then be published as an appendix to the re-
spective studies in order to facilitate their comparabil-
ity leading to more resilient research results.
REFERENCES
Banks, V. A., Eriksson, A., O’Donoghue, J., and Stanton,
N. A. (2018). Is partially automated driving a bad
idea? Observations from an on-road study. Applied
Ergonomics, 68:138–145.
Banks, V. A. and Stanton, N. A. (2016). Keep the driver in
control: Automating automobiles of the future. Ap-
plied Ergonomics, 53(June):389–395.
Bubb, H., Bengler, K., Gr
¨
unen, R. E., and Vollrath, M.
(2015). Automobilergonomie. Springer Fachmedien
Wiesbaden, Wiesbaden.
Bundesanstalt f
¨
ur Straßenwesen (2012). Einflussfaktoren
auf das Fahrverhalten und das Unfallrisiko junger
Fahrerinnen und Fahrer. Berichte der Bundesanstalt
f
¨
ur Straßenwesen, Heft M 229(Mensch und Sicher-
heit).
Capallera, M., de Salis, E., Meteier, Q., Angelini, L., Car-
rino, S., Khaled, O. A., and Mugellini, E. (2019). Sec-
ondary task and situation awareness, a mobile applica-
tion for conditionally automated vehicles. In Proceed-
ings of the 11th International Conference on Auto-
motive User Interfaces and Interactive Vehicular Ap-
plications: Adjunct Proceedings, pages 86–92, New
York, NY, USA. ACM.
Donges, E. (1982). Aspekte der Aktiven Sicherheit bei
der F
¨
uhrung von Personenkraftwagen. Automobil-
Industrie, 27:183–190.
Eriksson, A., Banks, V. A., and Stanton, N. A. (2017). Tran-
sition to manual: Comparing simulator with on-road
control transitions. Accident Analysis & Prevention,
102:227–234.
Eriksson, A. and Stanton, N. A. (2017). Takeover Time in
Highly Automated Vehicles: Noncritical Transitions
to and From Manual Control. Human Factors: The
Journal of the Human Factors and Ergonomics Soci-
ety, 59(4):689–705.
Hackman, J. R. (1969). Toward understanding the role
of tasks in behavioral research. Acta Psychologica,
31:97–128.
Hartfiel, B., Kroys, A., Kruithof, N., and Stark, R. (2019).
Driving Simulator with VR Glasses for Evaluation of
New Interior Concepts. ATZ worldwide, 121(11):16–
23.
Jamson, A. H., Merat, N., Carsten, O. M., and Lai, F. C.
(2013). Behavioural changes in drivers experienc-
ing highly-automated vehicle control in varying traffic
conditions. Transportation Research Part C: Emerg-
ing Technologies, 30(May):116–125.
K
¨
ohn, T., Gottlieb, M., Schermann, M., and Krcmar, H.
(2019). Improving take-over quality in automated
driving by interrupting non-driving tasks. In Proceed-
ings of the 24th International Conference on Intelli-
gent User Interfaces, volume Part F1476, pages 510–
517, New York, NY, USA. ACM.
Larsson, P., Johansson, E., S
¨
oderman, M., and Thomp-
son, D. (2015). Interaction Design for Communi-
cating System State and Capabilities during Auto-
mated Highway Driving. Procedia Manufacturing,
3(Ahfe):2784–2791.
Li, S., Blythe, P., Guo, W., Namdeo, A., Edwards, S., Good-
man, P., and Hill, G. (2019). Evaluation of the ef-
fects of age-friendly human-machine interfaces on the
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
72

driver’s takeover performance in highly automated ve-
hicles. Transportation Research Part F: Traffic Psy-
chology and Behaviour, 67:78–100.
McGrath, J. E. and Altman, I. (1966). Small Group Re-
search: A Synthesis and Critique of the Field. Holt,
Rinehart and Winston.
McMahan, A. (2003). Immersion, Engagement, and Pres-
ence: A Method for Analyzing 3-D Video Games. In
The Video Game Theory Reader, chapter 3, pages 67–
86.
Merat, N., Jamson, A. H., Lai, F. C., Daly, M., and Carsten,
O. M. (2014). Transition to manual: Driver behaviour
when resuming control from a highly automated vehi-
cle. Transportation Research Part F: Traffic Psychol-
ogy and Behaviour, 27(PB):274–282.
Naujoks, F., Wiedemann, K., and Sch
¨
omig, N. (2017). The
Importance of Interruption Management for Useful-
ness and Acceptance of Automated Driving. In Pro-
ceedings of the 9th International Conference on Au-
tomotive User Interfaces and Interactive Vehicular
Applications, pages 254–263, New York, NY, USA.
ACM.
Neuhuber, N., Lechner, G., Kalayci, T. E., Stocker, A., and
Kubicek, B. (2020). Age-related differences in the in-
teraction with advanced driver assistance systems - a
field study. In Kr
¨
omker, H., editor, HCI in Mobility,
Transport, and Automotive Systems. Automated Driv-
ing and In-Vehicle Experience Design, pages 363–
378, Cham. Springer International Publishing.
Othersen, I. (2016). Vom Fahrer zum Denker und
Teilzeitlenker. Springer Fachmedien Wiesbaden,
Wiesbaden.
Petermeijer, S., Bazilinskyy, P., Bengler, K., and de Winter,
J. (2017). Take-over again: Investigating multimodal
and directional TORs to get the driver back into the
loop. Applied Ergonomics, 62(July 2017):204–215.
Pretto, P., M
¨
ortl, P., and Neuhuber, N. (2020). Fluid in-
terface concept for automated driving. In Kr
¨
omker,
H., editor, HCI in Mobility, Transport, and Automo-
tive Systems. Automated Driving and In-Vehicle Expe-
rience Design, pages 114–130, Cham. Springer Inter-
national Publishing.
Rasmussen, J. (1983). Skills, Rules, and Knowledge; Sig-
nals, Signs, and Symbols, and Other Distinctions in
Human Performance Models. IEEE Transactions on
Systems, Man, and Cybernetics, 13(3):257–266.
SAE International (2018). Ground Vehicle Standard (SAE
J3016:JUN2018): Surface Vehicle Recommended
Practice J3016: (R) Taxonomy and Definitions for
Terms Related to Driving Automation Systems for
On-Road Motor Vehicles. SAE International.
Sch
¨
omig, N., Hargutt, V., Neukum, A., Petermann-Stock,
I., and Othersen, I. (2015). The Interaction Between
Highly Automated Driving and the Development of
Drowsiness. Procedia Manufacturing, 3(Ahfe):6652–
6659.
Schwind, V., Knierim, P., Haas, N., and Henze, N. (2019).
Using Presence Questionnaires in Virtual Reality. In
Proceedings of the 2019 CHI Conference on Human
Factors in Computing Systems - CHI ’19, pages 1–12,
New York, New York, USA. ACM Press.
Walch, M., Frommel, J., Rogers, K., Sch
¨
ussel, F., Hock,
P., Dobbelstein, D., and Weber, M. (2017). Evalu-
ating VR Driving Simulation from a Player Experi-
ence Perspective. In Proceedings of the 2017 CHI
Conference Extended Abstracts on Human Factors in
Computing Systems - CHI EA ’17, volume Part F1276,
pages 2982–2989, New York, New York, USA. ACM
Press.
Winner, H., Hakuli, S., Lotz, F., and Singer, C., editors
(2015). Handbuch Fahrerassistenzsysteme. Springer
Fachmedien Wiesbaden, Wiesbaden.
Witmer, B. G. and Singer, M. J. (1998). Measuring Pres-
ence in Virtual Environments: A Presence Question-
naire. Presence: Teleoperators and Virtual Environ-
ments, 7(3):225–240.
Wu, Y., Kihara, K., Takeda, Y., Sato, T., Akamatsu, M.,
and Kitazaki, S. (2020). The relationship between
drowsiness level and takeover performance in auto-
mated driving. In Kr
¨
omker, H., editor, HCI in Mobil-
ity, Transport, and Automotive Systems. Driving Be-
havior, Urban and Smart Mobility, pages 125–142,
Cham. Springer International Publishing.
Development of a Test Environment for the Evaluation of Human-Technology Interaction in Cockpits of Highly-Automated Vehicles
73
