
Can I Just Pass by? Testing Design Principles for Industrial
Transport Robots
Marijke Bergman, Sandra Bedaf, Goscha van Heel and Janienke Sturm
School of HRM and Psychology, Fontys University of Applied Sciences, Eindhoven, The Netherlands
Keywords: Human-Robot Interaction, Transport Robot, AGV, Design Principles, Intent-expressive Behaviour, Legibility.
Abstract: Currently, two types of industrial collaborative robots are emerging: collaborative robot arms and transport
robots. For such robots to cooperate with humans, intuitive interaction is required. They have to display
behaviour that is predictable and legible and elicits positive emotions. In this paper we examine the application
of two general design principles to the design of transport robots: (1) use analogies from nature, and (2) adhere
to social rules. Both are expected to result in better user-experience and understanding of the behaviour and
intentions of a transport robot. The current study tests the effects of using 1a) a curved path and 1b) average
walking speed in combination with deceleration upon nearing the human, and 2a) swerving to the right and
2b) respecting personal space. The principles tested in this study show positive effects for user experience
and legibility. However, predictability is not improved. Options for additional adjustments, such as the use of
communicative lights, are discussed.
1 INTRODUCTION
In industry robots and humans cooperate increasingly
closely. So called collaborative robots are no longer
working in isolation, separated from their users by
fences or safety screens. The environment in which
collaborative robot operate will be less structured and
it is to be expected that more and more users will be
less experienced than traditional operators and will
have had less formal training to work with these
robots (Freese et al., 2018). In particular mobile
transport robots may encounter humans who are
casually passing by. Consequently, when
collaborative robots are implemented the human-
robot interaction changes as well. Collaborative
robots and humans form a team, as it were. In human
teams there is ample and timely exchange of
information (McNeese et al., 2018). Not all
information is exchanged verbally, there is a fair
amount of non-verbal communication as well. Such
sharing of information is necessary in human-robot
teams as well.
Cooperation and collaboration between robots
and humans require natural and intuitive interaction.
(Korondi et al., 2015). The fluency of the interaction
can be improved if humans can predict or anticipate
the actions of the robot (Hoffman & Breazeal, 2007;
2010). Predictable robot motion, motion that is
expected, supposedly helps humans to trust and
understand the robot (Dragan et al., 2013).
Furthermore, to obtain a fluent and intuitive
interaction, legible and intent-expressive behaviour is
required, helping humans to understand the robot’s
intentions, (Dragan et al., 2013; Lichtenthäler &
Kirsch, 2016).
Two types of robots are becoming common co-
workers in factories: 1) collaborative robotic arms
used for pick-and-place tasks or that may help
humans by handing over objects or mounting parts,
and 2) transport robots and autonomous guided
vehicles (AGV) that fetch and deliver parts and
products. Both types may encounter challenges where
intuitive, natural interaction and legible behaviour are
concerned. Interaction that is intuitive and natural
will not only improve user experience but will also
reduce cognitive load for the user.
The concept of cognitive load is used in
interaction design and the field of UX (user
experience) as the amount of mental resources needed
to use a product or its interface. Cognitive psychology
and engineering psychology use similar concepts
such as information load, task load and workload. The
amount of information humans can process is limited
by, amongst others, the capacity of working memory,
the complexity of the information, and the amount
178
Bergman, M., Bedaf, S., van Heel, G. and Sturm, J.
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots.
DOI: 10.5220/0010144301780187
In Proceedings of the 4th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2020), pages 178-187
ISBN: 978-989-758-480-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and diversity of attention the interaction and other
events in the environment demand (see, e.g., Wickens
et al., 2015). In cases where more information has to
be processed than the available processing capacity
accommodates, humans will miss information, get
stressed and experience cognitive failures (Broadbent
et al., 1982; Simpson et al., 2005; Wadsworth et al.,
2003). Moreover, limiting cognitive load in human-
robot interaction is interrelated with increasing trust
in the robot (Ahmad et al., 2019; Novitsky et al.,
2018) and acceptance (Palinko & Sciutti, 2014).
In line with this, research shows that the more
predictable the motions of a robot are, the better
human task performance (Koppenborg et al., 2017)
and the higher experienced comfort or safety will be
(Butler & Aga, 2001; Tan et al., 2009). The use of
well thought out design principles could thus be
beneficial for interaction and teamwork (Petruck et
al., 2016). Many principles may be discerned,
however, for this study we will limit ourselves to two
general principles that are applicable in many
contexts and for most types of robots.
One principle is to make use of metaphors and
analogies from the natural world i.e. from nature.
We interpret the looks and actions of objects and
creatures we do not know within a frame of reference
based on things and situations that are familiar to us.
We create mental models using analogies and
metaphors of similar objects and situations from the,
mostly natural, world around us. Employing natural
cues utilizes existing, well-calibrated mental models
and improves the quality and efficiency of the
interaction (Goodrich & Olsen, 2003). Furthermore,
we are subject to animism and tend to project
characteristics of lifeforms onto non-living objects
(Korondi et al., 2015). In designing the behaviour of,
mostly social, robots this is used by modelling it after
human behaviour and interactions between humans
(Kittmann et al., 2015; Takayama et al., 2011). Such
modelling is claimed to help interpret, understand and
predict the motion behaviour of robots (Goodrich &
Olsen, 2003; Lichtenthäler & Kirsch, 2016). For
instance: “The industrial robot is like an extra arm to
work on the product”.
Using lifelike appearances or behaviour does not
necessarily mean that a robot should specifically look
and behave as a human (de Graaf et al., 2015). In
agreement with Kruse et al. (2013), we define
naturalness as the similarity of (low level) behaviour
between robots and living creatures. Bergman et al.
(2019) suggest that, in addition to or instead of
modelling after humans, emulating animalistic
behaviour and using animal metaphors can be used to
make the interaction with collaborative robots more
intuitive and to support building useful mental
models. For instance: “The transport robot is like a
dog fetching things”. Similar claims are made by
others (Koay et al., 2013; Philips et al., 2012; Sharp
et al., 2019). Humans often have an intuitive
understanding of what an animal is communicating
and how to interpret their signalling behaviour. Thus,
mimicking or emulating relevant aspects of such
behaviour may serve well to improve the legibility of
robot behaviour (Lichtenthäler & Kirsch, 2016).
However, care should be taken to assure that such
analogies and metaphors are suitable in the context in
which they are used. Also, the looks and behaviour
should be consistent with the actual capabilities of the
robot (Rose et al., 2010), thus providing relevant cues
and interaction affordances (Hoffman & Ju, 2014).
Another principle is to adhere to social rules.
This principle partly overlaps with using analogies
from the natural world. Behaviour displayed by
humans as well as some animals conform to social
rules. Various studies in human-robot interaction
show that similar social rules displayed by the robot,
result in positive user experience and more intuitive
interaction. Consequently, the robot is seen as
sociable, where sociability can be defined as adhering
to (high-level) cultural conventions (Kruse et al.,
2013).
Social skills are considered vital for robots that
function as companions or assistants (Ogden &
Dautenhahn, 2000), but smoothen interaction with
other types of robots as well. Among such skills are
not interrupting humans unnecessarily, moving out of
the way and slowing down when getting close,
avoiding to approach a human from behind, and
showing awareness or attention (Dautenhahn, 2007).
For instance, respecting someone’s personal space
makes a user feel safer and more comfortable around
a robot (Bortot et al., 2012; Rios-Martinez et al.,
2015; Tan et al., 2009). Being polite through
approaching and turning toward a user helps to
initiate interaction (Kato et al., 2015).
Acknowledging a user by a social gesture like
nodding, increases the social acceptance of an
industrial, non-humanoid, robot (Elprama et al.,
2016).
In this study we focus on applying these two
interrelated design principles, as to how they help
users to understand the behaviour of and interact
intuitively with transport robots. Expectations are,
that using design principles that a) use analogies from
nature and b) adhere to social rules, will result in a
more positive experience and in a better
understanding of the behaviour and intentions of a
transport robot. That is, the application of such
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots
179

principles will result in positive emotions or affect as
opposed to negative emotions or affect, and it will
result in higher legibility and predictability of the
behaviour. We aim at a parsimonious approach,
looking for maximal effects of minimal adjustments
in existing collaborative transport robots. The
movements and behaviour in robots currently
available, are limited mainly by technical constraints
and safety guidelines. Redesigning the behaviour of
such robots is considered challenging (Dautenhahn,
2007; Liu et al., 2019). In addition to being
parsimonious, adjustments should contribute to
reducing the cognitive load put on the user.
2 DESIGN PRINCIPLES FOR
TRANSPORT ROBOTS
Assuming that such general principles as mentioned
above may improve user experience, it is useful to
determine how these principles can be made more
specific for transport robots in an industrial work
environment. Here AGVs and transport robots are no
longer confined to warehouses where they work in
isolation. Autonomous transport robots now emerge
in settings where they, for instance, bring and fetch
parts for assembly workers. They thus move around
in factory halls together with humans. So, the
question arises what natural behaviour would be
suitable to use. Which social rules are important for
an industrial transport robot?
2.1 Analogies from Nature
Implementing natural motion in a transport robot
aims at increasing its acceptability through making it
behave more like a human or an animal. To emulate
natural behaviour and to make a transport robot more
lifelike some animation techniques may be useful.
For instance, in nature living creatures usually follow
arched trajectories, in contrast to mechanical objects
that more often follow straight paths. Thus, making a
transport robot move through a curved path can be
used to make it more predictable (Kruse et al., 2013;
Olivera & Simmons, 2002) or to deduce its intentions
more easily (Mavrogiannis & Knepper, 2019).
A second animation technique slow in and slow
out can suggest the natural acceleration and
deceleration of living creatures. Also, it is known that
creatures or objects approaching at high speed, elicit
fear and often result in flight reactions (Stankowich
& Blumstein, 2005). In line with this, Kirby et al.
(2009) suggest limiting the velocity of transport
robots to human walking speed between 1 and 2 m/s,
as to increase perceived safety. Butler and Aga
(2001), and Pacchierotti et al. (2005) also showed that
the relative speed of a mobile robot is an important
factor in user experience. Additionally, Kruse et al.
(2013) showed that reducing velocity when
approaching a person improves user experience with
mobile robots. Existing mobile robots mostly
conform to walking speed because of safety
regulations.
In addition, it may be helpful to make internal
robot states, like being stand by or in error mode,
visible in an intuitive manner. This may be achieved
by mimicking being at rest or sleeping, or being
confused, and draws on a familiar frame of reference.
Animated lights (Baraka et al., 2016) or a pulsing
light mapped to the rhythm of a human heartbeat
(Wessolek in Harrison et al., 2012), for example, may
be used to communicate state or intentions. In this
case light is used to
It is suggested regularly, that adding a face or a
snout to a robot will help to generate a focal point for
interaction, referring to objects or locations and
helping to infer the intentions of a robot. However,
adding a head or snout and gazing behaviour to a
transport robot would require quite extensive
adjustments and hardly be parsimonious (Admoni &
Scassellati, 2017). Also gazing behaviour may
increase the cognitive load if it distracts the user from
the task at hand.
In the current research a) a curved path or arc, and
b) average walking speed in combination with slow in
and slow out will be used deliberately to make the
communicative behaviour of the robot more intuitive
and to
improve human-robot interaction. Some
existing AGVs and transport robots use of a curved
path to avoid obstacles or average walking speed in
combination with slow in and slow out for safety
reasons. However, these movements are often
unintentional, i.e. not the result of consistent
implemented natural motions derived from analogies
from nature.
2.2 Social Rules
According to Kruse et al. (2013) applying social rules
deals with modelling and respecting cultural norms.
This helps to prevent discomfort and to improve the
interactions. Typical rules in the context of mobile
robots are that the robot should keep an adequate
distance as to respect personal space, should move to
its right when it approaches from the front or should
slow down when encountering humans. Currently,
many transport robots approach humans as obstacles,
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
180

moving in a straight line towards the obstacle before
stopping or going around it at a short distance.
In general, humans prefer to stay out of each
other’s personal or intimate space, when close contact
is not essential. Several studies show, that humans
feel more comfortable with mobile robots that respect
personal space by remaining at a distance of 1.22m
up to 2.44m (Khambhaita & Alami, 2020; Kirby,
2010; Kruse, et al., 2013; Rios-Martinez et al., 2015;
Torta et al., 2013; Walters et al., 2009). Shorter
distances may sometimes be acceptable though. This
may depend on the specific context and spatial layout
or cultural and personal differences (Kirby, 2010),
and by the size of the robot (Butler & Agah, 2001).
Yet overall, humans prefer a robot to stay out of their
personal and intimate space when they pass each
other (Pacchierotti et al., 2006).
Moving to one’s right when someone is walking
towards another person is a common social rule in
many countries. When a mobile social robot is
approaching a person in a hallway it is also preferred
that the robot moves to its right side of the hallway
(Kirby et al., 2009; Pacchierotti et al., 2005; Rios-
Martinez, 2015). In contrast, Neggers et al., (2018)
claim that there is no difference between left or right
passage. Some studies indicate that the onset of this
evasive movement should start in time (Fernandez et
al., 2018; Pacchierotti et al., 2006) or at a distance of
6 meters (Pacchierotti et al., 2005). The optimal
lateral distance between human and robot is
inconclusive. Some studies state that the robot should
move as far to its right as the layout of the hallway
allows (Pacchierotti et al., 2005). However, this
lateral distance may also be influenced by many
different factors such as the form, size and speed of
the robot (Rios-Martinez, 2015).
It is to be expected, that the aforementioned social
rules will apply to social robots and transport robots
or AGVs alike. The current study will include a)
swerving to the robot’s right, and b) respecting
personal space by keeping an adequate distance from
humans.
2.3 Current Study
The current study explores a) the effect of the
movements of a transport robot on the experienced
emotions or affect by humans, and b) the effect of the
movements of the robot on its legibility and
predictability. We examine how using the design
principles, as explained above, influence the user
experience, as well as the legibility and predictability
of the movement behaviour of the robot. We follow
the definitions given by Dragan et al. (2013) and
Lichtenthäler and Kirsch (2016), where legible
behaviour is behaviour that ensures the intentions of
the robot can be understood, and predictable motion
is motion that is expected and can be foretold, helping
humans to understand the robot’s intentions (Dragan
et al., 2013). It is to be expected, that the application
of the principles used here, will result in positive
emotions or affect, as opposed to negative emotions
or affect, and it will result in higher legibility and
predictability of the behaviour.
The user tests consist of two experimental
conditions where a mock-up transport robot, inspired
by the MiR100, is used. The transport robot
approaches a human from the front before passing, in
a constrained area like a factory hall: 1) the robot
moves along a straight path and, using the animation
technique slow in and slow out, stops in front of the
participant, and 2) the robot uses a curved path, based
on the animation technique arched trajectories, to
move around the participant using social rules such as
swerving to its right and respecting personal space.
Both conditions will use an average walking speed.
All dependant variables, affect, legibility and
predictability, will be measured by asking
participants to rate their experiences on a 5-point
rating scale.
3 METHOD
3.1 Participants
The individual user tests with two conditions were
conducted at Fontys University of Applied Sciences
in Eindhoven, the Netherlands. A total of 30 adults
(13 male and 17 female) participated in the test.
Among the participants were participants from the
general public, as well as students and lecturers of the
Fontys school of HRM and Psychology. Most
participants had little or no experience with transport
robots or AGVs. All participants were aged 18+.
Further background information was not registered
for privacy reasons. Participants were selected based
on their availability at the test location and randomly
assigned to one of the two conditions. This resulted in
8 male and 7 female participants for condition 1, and
5 male and 10 female participants for condition 2.
3.2 Measures
The questionnaire consisted of a total of 15 items that
were rated on a 5–point answering scale (1 = totally
disagree, through 5 = totally agree) as a subjective
measure of the user experience. The first part of this
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots
181

questionnaire was loosely based on the item scales
perceived safety and likeability from the Godspeed
questionnaire (Bartneck et al., 2009), translated from
English into Dutch. These items were used to measure
positive and negative affect. A statement “I felt …”
was used, followed by one of 13 adjectives, for
example safe, agitated, relaxed, anxious, pleasant or
unpleasant. All adjectives were placed in random
order. Additionally, two statements to assess the
legibility and predictability of the robot behaviour
were included (Lichtenthäler & Kirsch, 2016).
Furthermore, a short semi-structured interview
was conducted afterwards to gather additional
information on how participants experienced the
specific movements of the transport robot, as well as
its speed. These interviews will help to understand
how and why the design principles may work for the
participants.
3.3 Procedure
The user tests were conducted in a public space at the
university. A radio-controlled car was given a casing
inspired by the looks of the MiR100 (Mobile
Industrial Robots A/S; see Figure 1). The MiR100 is
an autonomous transport robot that measures 890 mm
x 580 mm x 352 mm. Its maximum speed is 1.5 m/s,
which is comparable to an average walking speed. A
Wizard of Oz method was applied in this study, as the
test leader operated the mock-robot without the
participants knowing. All user tests were filmed with
permission of the participants. After a short
introduction and signing of the informed consent,
participants were assigned to one of the two
conditions.
In condition 1 the robot started to move once the
participants passed line a, at an average walking
speed of approximately 1.1 m/s to 1.4 m/s, following
a straight path from Point B towards point A (see
Figure 2). The robot started to slow down after
passing line e and when the participant reached line c
the robot stopped at line d.
In condition 2 the robot also started to move at
average walking speed in a straight path from Point B
towards point A once the participants passed line a
(see Figure 3). After passing line f the robot moved to
the right using a curved path. The distance between
the participants and the robot, between line c and line
d, was approximately 30 cm. After passing line c the
robot returned to its original path, again through a
curved path, and continued to move towards point B
in a straight path.
Figure 1: Scaled radio-controlled car with the casing
inspired by the looks of a MiR100.
For both conditions, points A and B were the same
and marked on the floor using tape, just as line a
through f (see Figure 2 and Figure 3). Participants
were instructed to stand on point A and to start
walking, at normal speed, towards Point B once the
researcher would say “go”.
Figure 2: Straight path of the robot in condition 1.
Participants were informed that when they would
start to walk, the robot would start to move towards
them. However, no information was given on how the
robot would move. This situation was closely
observed to see if and when the participant would
walk around the robot to reach point B. After
performing the test, participants were asked to fill out
the questionnaire and to participate in the interview.
All interviews were audio recorded.
For the quantitative data from the questionnaire,
statistical tests were performed to determine
differences between the two conditions and to
examine to what extent the scores for affect deviate
from the middle value of the rating scale. The
qualitative data from the interviews were transcribed
and coded following the grounded theory method of
open, axial, and selective coding.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
182
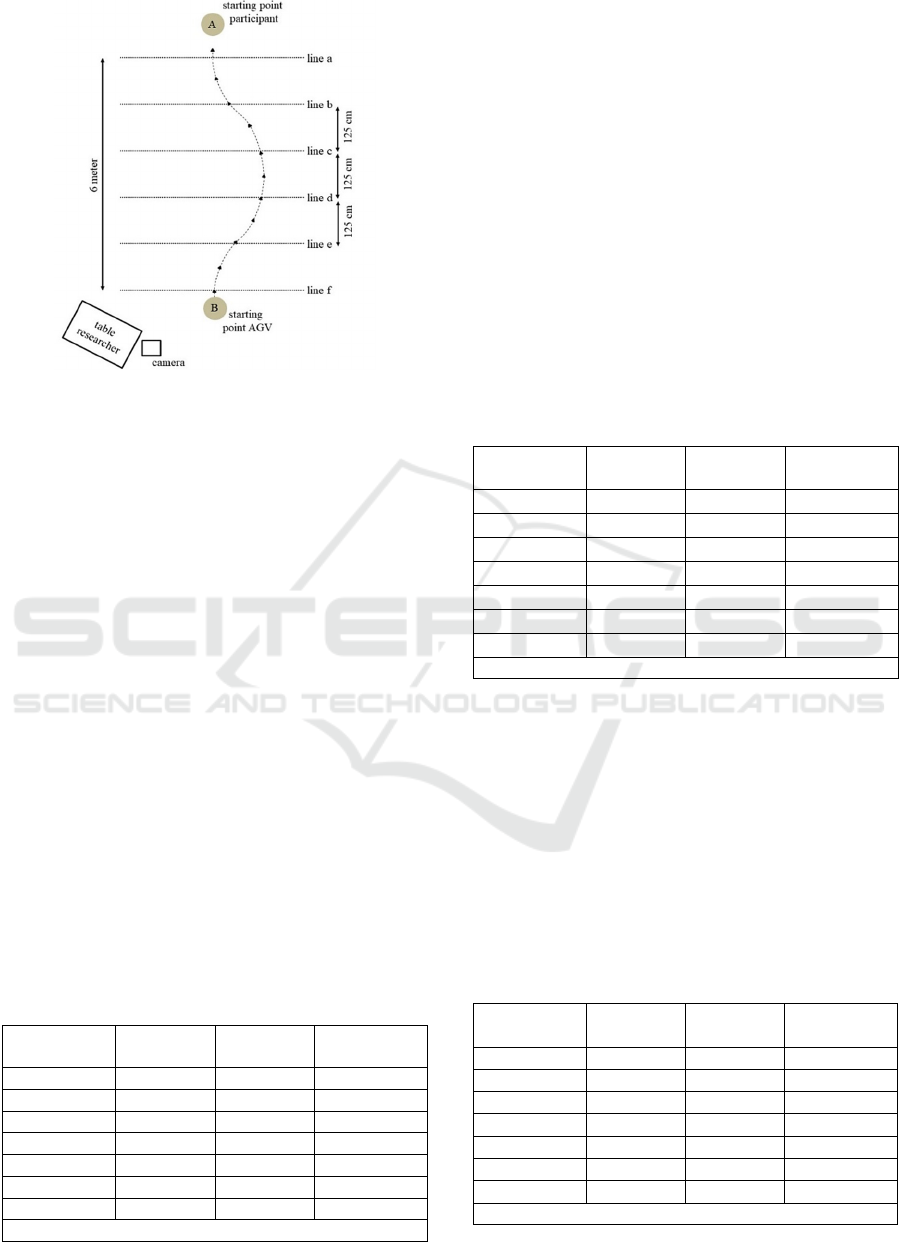
Figure 3: Curved path of the robot in condition 2.
4 RESULTS
4.1 User Experience and Affect
To determine the effect of the movements of the robot
on the experienced emotions or affect, the scores on
the items measuring affect were tested against the
scale middle value, i.e. 3 on a 5-point scale (One
Sample t Test). Twelve of the 13 items measuring
affect were used in the analyses. One item, surprising,
was excluded, since it was deemed ambiguous.
For condition 1, straight path, the mean scores for
items indicating negative affect are, in general,
significantly lower than the scale middle value (see
Table 1). Of the scores for items indicating positive
affect, only the items calm (t(28) = 2.358, p = .033,
M = 3.6, SD = .99) and relaxed (t(28) = -3.761, p =
.002, M = 3.9, SD = .96) are a significantly higher
than the middle value. These results indicate that, in
general, the straight path of the robot is not
experienced distinctly negative by the participants.
Table 1: Mean scores for negative affect in condition 1
tested against the middle value of the 5-point rating scale.
Affect Mean SD
t-value
df = 28
intimidated 2.3 1.23 -2.092*
suspicious 3.0 1.36 0
uneasy 2.2 1.27 -2.449**
tensed 2.2 1.15 -2.703**
unpleasant 2.0 1.00 -3.873**
scared 1.6 0.74 -7.359**
overall 2.22
* p-value ≤ .10; ** p-value ≤ .05
Moreover, the scores are rather neutral for this
condition.
For condition 2, curved path, the scores for
negative affect are, similar to condition 1, lower than
the middle value of the 5-point answering scale (see
Table 2), implying that the robot using a curved path
is not experienced as negative either. Though the
scores for negative affect in condition 2 seem to be
even lower than in condition 1, the difference
between the two conditions is not significant (using
an Independent Samples t Test). However, when
comparing individual items, it became apparent that
the curved path used in condition 2 was experienced
as less intimidating by the participants (M = 1.6, SD
= .91), than the straight path of the robot in condition
1 (M = 2.3, SD = 1.23), t(28) = 1.852, p = .075.
Table 2: Mean scores for negative affect in condition 2
tested against the middle value of the 5-point rating scale.
Affect Mean SD
t-value
df = 28
intimidated
1.6
0.91
-5.957**
suspicious
2.9
1.25
-0.414
uneasy
2.2
1.08
-2.863**
tensed
2.1
1.10
-3.287**
unpleasant
1.9
0.96
-4.298**
scared
1.6
1.11
-4.641**
overall
2.06
** p-value ≤ .05
The scores for positive affect in condition 2 were,
in general, above the middle value of the 5-point
answering scale, though not all significantly so (see
Table 3). This implies that the robot using a curved
path is experienced as fairly positive. Overall, the
scores for positive affect do not show significant
differences between conditions 1 (M = 3.4, SD =
0.18) and condition 2 (M = 3.6, SD = 1.09), using an
Independent Samples t Test. It seems that neither a
curved, nor a straight path do elicit strong emotions
Table 3: Mean scores for positive affect in condition 2
tested against the middle value of the 5-point rating scale.
Affect Mean SD
t-value
df = 28
safe
3.8 1.42 2.175**
comfortable
3.4 1.24 1.247
at ease
3.5 1.19 1.522
tranquil
3.8 1.08 2.863**
relaxed
3.3 1.05 1.234
calm
3.9 1.19 2.827**
overall
3.6
** p-value ≤ .05
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots
183

4.2 Legibility and Predictability
To determine the effect of the movement of the robot
on its legibility and predictability, the scores on these
items were compared for the two conditions, again
using an Independent Samples t Test. The scores for
these items indicate that participants rated the curved
path of the robot in condition 2 (M = 4.1, SD = 1.35)
as significantly more legible than the straight path
used in condition 1 (M = 3.1, SD = 0.99), t(28) = -
2,783, p = 0,011). The scores regarding the
predictability of the robot of condition 1 (M = 2.4, SD
= 0.9) and condition 2 (M = 2.7, SD = 1.34) showed
no significant difference. Also, both conditions score
below the middle value of 3 on the 5-point answering
scale, suggesting both the straight and the curved path
were not seen as very predictable.
In addition to the quantitative analyses, the results
from the semi-structured interviews clearly show
overlap with the results from the questionnaires. For
both conditions, participants stated they failed to
predict the robot’s next move. They explained that
they, unsuccessfully, searched for contact with the
robot, hoping to be able to predict its next move.
Several participants compared this need for contact to
the situation where two people, who walk in the
opposite direction towards each other, can
communicate their path and their next move using
non-verbal behaviour, such as eye contact in
combination with body language. In order to improve
the legibility, participants suggested to add turn
signals and brake lights to the robot, or to project its
path on the floor.
4.3 Qualitative Data
Where the design principles are concerned, the
qualitative analyses give some interesting additional
insights. First, the use of analogies from nature
through moving along an arched trajectory, results in
less negative experiences shared by the participants,
than the statements made by the participants who
experienced the straight path condition. Participants
of condition 2 mentioned that using the curved path
resulted in the robot displaying more natural
movement or behaviour. Such an experience was not
mentioned by the participants of condition 1.
The participants of condition 1 appreciated the
deceleration of the robot, which was based on the
animation technique slow in slow out, as it gave them
the time to anticipate the actions of the robot.
However, the majority of them did not understand
why the robot slowed down and stopped in front of
them. Multiple participants also wished that the robot
would have moved to the side instead of moving
straight towards them.
The majority of the participants thought the
velocity limited at natural walking speed of the robot
was appropriate. Some participants, however,
preferred the robot to move slower.
As for adhering to social rules, in condition 1 the
vast majority of the participants thought the stopping
(social) distance of 125 cm was fine. In condition 2
the robot passed the participant at a distance of 30 cm.
None of the participants of condition 2 experienced
this as an anxious or threatening situation.
5 DISCUSSION
Overall, the use of the two design principles tested
here, show positive effects for the user experience
Analogies from nature, operationalized through the
curved path and the deceleration of the robot, show
positive effects on the user experience, in particular
where affective experiences are concerned. This
coincides with adhering to social rules such as
swerving to the right. Also, these design principles
appear to improve the legibility of the transport robot.
However, as far as predictability is concerned, these
principles do not seem to contribute much. This result
is in contrast with previous research (Kruse et al.,
2013; Olivera & Simmons, 2002). Yet, other earlier
studies indicate that path adaptation may be more
confusing and more uncomfortable than velocity
adaptation (Kruse, 2014). Furthermore, the concepts
legibility and predictability may be confounded
(Lichtenthäler & Kirsch, 2016). In the current
experiment, the participants in condition 1 experience
the adaptation in velocity as positive, as it gives them
time to anticipate the behaviour of the robot. This is
in line with the findings of Kruse.
Though the design principles used did appear to
improve the legibility of the robot, there is still room
for further improvement. In order to improve the
legibility further, it is important to provide useful cues
regarding the internal state of the robot, such as its
intentions. However, care should be taken to avoid
accidentally creating misleading cues (Kruse et al.,
2014). In line with the goal of the project, minimal
adjustments to the robot, while creating a maximum
impact, are preferred.
Add-ons such as light or sound fit these criteria.
As the transport robot operates in noisy industrial
settings, add-ons using sound are not very obvious.
Adding light signals, on the other hand, does not
require extensive adjustments to current transport
robots and AGVs. Light signals are rather easy to
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
184

detect for humans and in addition they attract
attention. Furthermore, they are readily interpreted as
an attempt to communicate (Fernandez et al., 2018).
Participants in the current study indicate, that the
legibility or the predictability of the robot could be
improved by adding light signals. They thought of
turn signals or brake lights, similar to those used on
cars, or to use a projection to show its direction and
purpose. Several studies already focussed on adding
light interfaces to, for example, cars or drones
(Habibovic et al., 2018; Szafir et al., 2015) or use
projection to communicate directions (Chadalavada,
2016; Chadalavada et al., 2020). Therefore, adding
communicative light signals to a transport robot is an
interesting option to explore further. However, it
should be taken into account that communicating the
intention of a transport robot is more complex than
adding a simple turn signals, since these are difficult
to interpret when detached from the context of cars
(Fernandez et al., 2018).
The user tests were performed in a in a public
space at the university, which is not a very realistic
working environment of a transport robot. Using a
scaled radio-controlled car with the chasing inspired
by the looks of a MiR100 in combination with the
Wizard of Oz method is a relative simple method to
test complex robot behaviour with users (Dahlbäck et
al., 1993; Walters et al., 2005). However, the chasing
and scaled size of the mock-up transport robot used
may have influenced the results. The slightly smaller
scale may, for instance, appear friendlier or less
threatening than the actual MiR100. Additionally,
simulating consistent robot behaviour is difficult for
a human operator, even in similar situations (Walters
et al., 2005). Using the Wizard of Oz method may
have led to inconsistencies between the sessions.
Additional experiments should take place in a more
realistic setting, using actual transport robots or
AGVs. Further, it is advisable to explore the possible
confounding of the concepts legibility and
predictability.
6 CONCLUSION
To make the behaviour of transport robots more
legible and predictable, one needs carefully thought
out design principles. Two general design principles
were examined here: (1) use analogies from nature
and (2) adhere to social rules. The effects of using
natural walking speed, timely deceleration (slow in
and slow out), a curved path (arched trajectory), in
combination with swerving to the right, show positive
effects for the user experience and improve the
legibility of the transport robot. Future research may
explore the distinguished effects of these variables.
In order to further improve the legibility of
transport robots and AGVs communicative light
signals could be used to convey intentions. However,
more research is needed to determine which signals
are most appropriate to ensure intuitive interaction in
an industrial setting. Applying proven principles will
contribute to intuitive interaction between humans
and collaborative robots, and promote effective
teamwork.
ACKNOWLEDGEMENTS
This research is funded by the Dutch Ministry of
Economic affairs through the SIA-RAAK program,
project “Close encounters with co-bots”
RAAK.MKB.08.018.
REFERENCES
Admoni, H. & Scassellati, B. (2017). Social eye gaze in
human-robot interaction: a review. Journal of Human-
Robot Interaction, 6(1), 25-63.
Ahmad, M.I., Bernotat, J., Lohan, K., & Eyssel, F. (2019).
Trust and Cognitive Load During Human-Robot
Interaction. arXiv preprint arXiv:1909.05160.
Baraka, K., Paiva, A., & Veloso, M. (2016). Expressive
lights for revealing mobile service robot state. In Robot
2015: Second Iberian Robotics Conference (pp. 107-
119). Springer, Cham.
Bartneck, C., Kulić, D., Croft, E., & Zoghbi, S. (2009).
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and
perceived safety of robots. International journal of
social robotics, 1(1), 71-81.
Bergman, M., de Joode, E., de Geus, M., & Sturm, J.
(2019). Human-cobot Teams: Exploring Design
Principles and Behaviour Models to Facilitate the
Understanding of Non-verbal Communication from
Cobots. In Proceedings of the 3rd International
Conference on Computer-Human Interaction Research
and Applications (CHIRA) (pp. 191-198).
Bortot, D., Ding, H., Antonopolous, A., & Bengler, K.
(2012). Human motion behavior while interacting with
an industrial robot. Work, 41(Supplement 1), 1699-
1707.
Broadbent, D.E., Cooper, P.F., FitzGerald, P., & Parkes,
K.R. (1982). The cognitive failures questionnaire
(CFQ) and its correlates. British journal of clinical
psychology, 21(1), 1-16.
Butler, J.T. & Agah, A. (2001). Psychological effects of
behavior patterns of a mobile personal robot.
Autonomous Robots, 10(2), 185-202.
Chadalavada, R. T. (2016). Human robot interaction for
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots
185

autonomous systems in industrial environments
[Unpublished master's thesis] Chalmers University.
Chadalavada, R.T., Andreasson, H., Schindler, M., Palm,
R., & Lilienthal, A.J. (2020). Bi-directional navigation
intent communication using spatial augmented reality
and eye-tracking glasses for improved safety in human–
robot interaction. Robotics and Computer-Integrated
Manufacturing, 61, 101830.
Dahlbäck, N., Jönsson, A., & Ahrenberg, L. (1993,
February). Wizard of Oz studies: why and how. In
Proceedings of the 1st international conference on
Intelligent user interfaces (pp. 193-200).
Dautenhahn, K. (2007). Socially intelligent robots:
dimensions of human–robot interaction. Philosophical
Transactions of the Royal Society B: Biological
Sciences, 362(1480), 679-704.
de Graaf, M.M., Allouch, S.B., & Van Dijk, J.A.G.M.
(2015). What makes robots social?: A user’s
perspective on characteristics for social human-robot
interaction. In International Conference on Social
Robotics (pp. 184-193). Springer, Cham.
Dragan, A.D., Lee, K.C., & Srinivasa, S.S. (2013).
Legibility and predictability of robot motion. In 2013
8th ACM/IEEE International Conference on Human-
Robot Interaction (HRI) (pp. 301-308). IEEE.
Elprama, B.V.S.A., El Makrini, I., & Jacobs, A. (2016).
Acceptance of collaborative robots by factory workers:
a pilot study on the importance of social cues of
anthropomorphic robots. In International Symposium
on Robot and Human Interactive Communication.
Fernandez, R., John, N., Kirmani, S., Hart, J., Sinapov, J.,
& Stone, P. (2018). Passive demonstrations of light-
based robot signals for improved human
interpretability. In 2018 27th IEEE International
Symposium on Robot and Human Interactive
Communication (RO-MAN) (pp. 234-239). IEEE.
Freese, C., Dekker, R., Kool, L., Dekker, F., & van Est, R.
(2018). Robotisering en automatisering op de
werkvloer – bedrijfskeuzes bij technologische
innovaties. Den Haag: Rathenau Instituut.
Goodrich, M.A. & Olsen, D.R. (2003). Seven principles of
efficient human robot interaction. In SMC'03
Conference Proceedings. 2003 IEEE International
Conference on Systems, Man and Cybernetics.
Conference Theme-System Security and Assurance
(Cat. No. 03CH37483) (Vol. 4, pp. 3942-3948). IEEE.
Habibovic, A., Lundgren, V.M., Andersson, J., Klingegård,
M., Lagström, T., Sirkka, A., Fagerlönn, J., Edgren, C.,
Fredriksson, R., Krupenia, S., & Saluäär, D. (2018).
Communicating intent of automated vehicles to
pedestrians. Frontiers in psychology, 9, 1336.
Harrison, C., Horstman, J., Hsieh, G., & Hudson, S. (2012).
Unlocking the expressivity of point lights. In
Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems (pp. 1683-1692).
Hoffman, G. & Breazeal, C. (2007). Effects of anticipatory
action on human-robot teamwork efficiency, fluency,
and perception of team. In Proceedings of the
ACM/IEEE international conference on Human-robot
interaction (pp. 1-8). ACM.
Hoffman, G. & Breazeal, C. (2010). Effects of anticipatory
perceptual simulation on practiced human-robot tasks.
Autonomous Robots, 28(4), 403-423.
Hoffman, G. & Ju, W. (2014). Designing robots with
movement in mind. Journal of Human-Robot
Interaction, 3(1), 91-122.
Kato, Y., Kanda, T., & Ishiguro, H. (2015). May I help
you?-Design of human-like polite approaching
behavior. In 2015 10th ACM/IEEE International
Conference on Human-Robot Interaction (HRI) (pp.
35-42). IEEE.
Khambhaita, H. & Alami, R. (2020). Viewing robot
navigation in human environment as a cooperative
activity. In Robotics Research (pp. 285-300). Springer,
Cham.
Kirby, R., Simmons, R., & Forlizzi, J. (2009). Companion:
A constraint-optimizing method for person-acceptable
navigation. In RO-MAN 2009-The 18th IEEE
International Symposium on Robot and Human
Interactive Communication (pp. 607-612). IEEE.
Kirby, R. (2010). Social Robot Navigation [Unpublished
Doctoral dissertation] Carnegie Mellon University.
Kittmann, R., Frolich, T., Schäfer, J., Reiser, U.,
Weisshardt, F., & Haug, A. (2015). Let me Introduce
Myself: I am Care-O-bot 4, a Gentleman Robot. In:
Mensch und Computer 2015 Tagungsband.
Koay, K.L., Lakatos, G., Syrdal, D.S., Gácsi, M., Bereczky,
B., Dautenhahn, K., Miklósi, A., & Walters, M.L.
(2013). Hey! There is someone at your door. A hearing
robot using visual communication signals of hearing
dogs to communicate intent. In 2013 IEEE Symposium
on Artificial Life (ALife) (pp. 90-97). IEEE.
Koppenborg, M., Nickel, P., Naber, B., Lungfiel, A., &
Huelke, M. (2017). Effects of movement speed and
predictability in human–robot collaboration. Human
Factors and Ergonomics in Manufacturing & Service
Industries, 27(4), 197-209.
Korondi, P., Korcsok, B., Kovács, S., & Niitsuma, M.
(2015). Etho-robotics: What kind of behaviour can we
learn from the animals?. IFAC-papersonline, 48(19),
244-255.
Kruse, T., Kirsch, A., Khambhaita, H., & Alami, R. (2014).
Evaluating directional cost models in navigation. In
Proceedings of the 2014 ACM/IEEE international
conference on Human-robot interaction (pp. 350-357).
Kruse, T., Pandey, A.K., Alami, R., & Kirsch, A. (2013).
Human-aware robot navigation: A survey. Robotics and
Autonomous Systems, 61(12), 1726-1743.
Lichtenthäler, C. & Kirsch, A. (2016). Legibility of robot
behavior: a literature review. Available from:
https://hal.archives-ouvertes.fr/hal-01306977
Liu, C., Tang, T., Lin, H.C., & Tomizuka, M. (2019).
Designing robot behavior in human-robot interactions.
CRC Press.
Mavrogiannis, C.I. & Knepper, R.A. (2019). Multi-agent
path topology in support of socially competent
navigation planning. The International Journal of
Robotics Research, 38(2-3), 338-356.
McNeese, N.J., Demir, M., Cooke, N.J., & Myers, C.
(2018). Teaming with a synthetic teammate: Insights
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
186

into human-autonomy teaming. Human factors, 60(2),
262-273.
Neggers, M.M., Cuijpers, R.H., & Ruijten, P.A. (2018).
Comfortable passing distances for robots. In
International conference on social robotics (pp. 431-
440). Springer, Cham.
Ogden, B. & Dautenhahn, K. (2000). Robotic etiquette:
Structured interaction in humans and robots. In Procs
SIRS 2000, 8th Symp on Intelligent Robotic Systems.
University of Reading.
Olivera, V.M. & Simmons, R. (2002). Implementing
human-acceptable navigational behavior and a fuzzy
controller for an autonomous robot. In Proceedings
WAF: 3rd workshop on physical agents (pp. 113-120).
Pacchierotti, E., Christensen, H.I., & Jensfelt, P. (2005).
Human-robot embodied interaction in hallway settings:
a pilot user study. In ROMAN 2005. IEEE International
Workshop on Robot and Human Interactive
Communication, 2005. (pp. 164-171). IEEE.
Pacchierotti, E., Christensen, H.I., & Jensfelt, P. (2006).
Evaluation of passing distance for social robots. In
Roman 2006-the 15th ieee international symposium on
robot and human interactive communication (pp. 315-
320). IEEE.
Palinko, O. & Sciutti, A. (2014). Exploring the estimation
of cognitive load in human robot interaction. In
Workshop HRI: A Bridge between Robotics and
Neuroscience at 9th ACM/IEEE International
Conference on Human-Robot Interaction (pp. 3-6).
Petruck, H., Kuz, S., Mertens, A., & Schlick, C. (2016).
Increasing safety in human-robot collaboration by
using anthropomorphic speed profiles of robot
movements. In Advances in Ergonomics of
Manufacturing: Managing the Enterprise of the Future
(pp. 135-145). Springer, Cham.
Rios-Martinez, J., Spalanzani, A., & Laugier, C. (2015).
From proxemics theory to socially-aware navigation: A
survey. International Journal of Social Robotics, 7(2),
137-153.
Rose, R., Scheutz, M., & Schermerhorn, P. (2010).
Towards a conceptual and methodological framework
for determining robot believability. Interaction Studies,
11(2), 314-335.
Sharp, H., Preece, J., & Rogers, Y. (2019). Interaction
design: Beyond human-computer interaction. John
Wiley & Sons.
Simpson, S.A., Wadsworth, E.J., Moss, S.C., & Smith, A.P.
(2005). Minor injuries, cognitive failures and accidents
at work: incidence and associated features.
Occupational Medicine, 55(2), 99-108.
Stankowich, T. & Blumstein, D.T. (2005). Fear in animals:
a meta-analysis and review of risk assessment.
Proceedings of the Royal Society B: Biological
Sciences, 272(1581), 2627-2634.
Szafir, D., Mutlu, B., & Fong, T. (2015). Communicating
directionality in flying robots. In 2015 10th ACM/IEEE
International Conference on Human-Robot Interaction
(HRI) (pp. 19-26). IEEE.
Takayama, L., Dooley, D., & Ju, W. (2011). Expressing
thought: improving robot readability with animation
principles. In 2011 6th ACM/IEEE International
Conference on Human-Robot Interaction (HRI) (pp.
69-76). IEEE.
Tan, J.T.C., Duan, F., Zhang, Y., Watanabe, K., Kato, R.,
& Arai, T. (2009). Human-robot collaboration in
cellular manufacturing: Design and development. In
2009 IEEE/RSJ International Conference on Intelligent
Robots and Systems (pp. 29-34). IEEE.
Torta, E., Cuijpers, R.H., & Juola, J.F. (2013). Design of a
parametric model of personal space for robotic social
navigation. International Journal of Social Robotics,
5(3), 357-365.
Wadsworth, E.J.K., Simpson, S.A., Moss, S.C., & Smith,
A.P. (2003). The Bristol Stress and Health Study:
accidents, minor injuries and cognitive failures at work.
Occupational Medicine, 53(6), 392-397.
Walters, M.L., Woods, S., Koay, K.L., & Dautenhahn, K.
(2005). Practical and methodological challenges in
designing and conducting human-robot interaction
studies. In Procs of the AISB 05 Symposium on Robot
Companions. AISB.
Walters, M.L., Dautenhahn, K., Te Boekhorst, R., Koay,
K.L., Syrdal, D.S., & Nehaniv, C.L. (2009). An
empirical framework for human-robot proxemics.
Procs of new frontiers in human-robot interaction.
Wickens, C.D., Hollands, J.G., Banbury, S., &
Parasuraman, R. (2015). Engineering psychology and
human performance. Psychology Press.
Can I Just Pass by? Testing Design Principles for Industrial Transport Robots
187
