
Driving Context Detection and Validation using Knowledge-based
Reasoning
Abderraouf Khezaz
1,2
, Manolo Dulva Hina
1
, Hongyu Guan
2
and Amar Ramdane-Cherif
2
1
ECE Paris, 37 quai de Grenelle, 75015, Paris, France
2
Universit
´
e Paris-Saclay, UVSQ, Laboratoire d’Ing
´
enierie des Syst
`
emes de Versailles, 78140, V
´
elizy-Villacoublay, France
Keywords:
Ontology, Knowledge Base, ADAS, Unity, Simulator.
Abstract:
The intensive research on artificial intelligence and internet of things is speeding up the rise of smart cities and
autonomous vehicles. In order to ensure the safety of the drivers and pedestrians, the transportation network
needs to be connected to its surroundings and consider every valuable piece of information it can gather.
Knowledge bases have proven themselves to be efficient in the storage and processing of structured data,
making them interesting solutions for the management of transportation networks. This study focuses on the
building of a driving simulator allowing the gathering of practical data that can be processed by an ontology
and a set of rules, and can quickly and continuously infer a result to suggest the driver on an optimal choice to
make. The accuracy results are encouraging, yet giving us extra room for improvement.
1 INTRODUCTION
The field of intelligent vehicles has progressed with
an important advancement in the last decades. Nowa-
days, the modern transportation environment has be-
come a dynamic and complex network made up of ve-
hicles, infrastructure and pedestrians, and road users
need to evolve in rapidly changing environment.
Real-life use of autonomous vehicles is becoming
more popular, popularized by scientific developments
such as the US DARPA Grand challenge (Defense
Advanced Research Projects Agency), which is a race
of autonomous cars organized by the US Army (Veres
et al., 2011). The concept is also finding its way in
civilian use, with cities like Dubai planning to deploy
a fleet of self-driving taxi, and already leading tests
with autonomous vehicles on their roads (Tesorero,
2019). However there are still ethical and technical
questions pending on the security of road users and
the responsibility of the driver in case of an accident:
In 2018, a Tesla vehicle crashed and killed the driver
due to an arguably wrong decision, and it took almost
2 years for the US Safety Administration to investi-
gate the case (Chokshi, 2020). If anything, those el-
ements are the proof that testing and validation need
to be made in a more rigorous and controlled environ-
ment, and that it is also natural to assert that autopilot
algorithms and ADAS (Advanced driver-assistance
systems) systems still need to be improved. Most of
those algorithms are based on machine learning and
neural networks features, and although those tech-
niques show great results in decision-making, there
is still room for improvement in their ability to store
and use data (Neoklis Polyzotis, 2017). Those ve-
hicles need to deal with a significant amount of in-
formation, and those data are frequently interlinked
between them. On the other hand, ontologies and
semantic web have proven themselves to be efficient
when dealing with organised and structured data. In
addition, there are modern tools that can be used to
apply rules and ”intelligent” reasoning to those data,
and generate logical outputs from the assertion input
information.
Considering the previous statements, it would be
interesting to have a simulated environment that could
be used for experimenting new models in a practi-
cal way. Hence the goal of this study will focus on
the setting up of a knowledge-base able to quickly re-
act to unexpected events and advise the driver on the
optimal action to take. It will be evaluated on reac-
tion time and performance, and the experiment will
be validated by a realistic driving simulator specifi-
cally built for this study.
Structure of the paper: Section 2 is dedicated to
the related works. Section 3 describes the general
concept of a knowledge-base and the building of the
one used for this study. The simulator used for the
experiment is introduced in Section 4, and the testing
Khezaz, A., Hina, M., Guan, H. and Ramdane-Cherif, A.
Driving Context Detection and Validation using Knowledge-based Reasoning.
DOI: 10.5220/0010135802190226
In Proceedings of the 12th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2020) - Volume 2: KEOD, pages 219-226
ISBN: 978-989-758-474-9
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
219

and results are described in Section 5. This paper is
concluded in the last section, which also contains our
future works.
2 RELATED WORKS
Semantic networks have been studied as early as the
1960’s(Collins, 1969), and has seen an increase in
popularity with the rise of the semantic web and on-
tologies.
As such, there has been some studies attempting
to use semantic web with vehicles. One of the first
was made by (T
¨
onnis et al., 2008) with the devel-
opment of SCORE (Spatial Context Ontology Rea-
soning Environment), a distributed system that col-
lects data and deduces the relative position of the road
users. The data gathering is made of static RSU (Road
Side Units), while the reasoning is directly embedded
in the vehicles. The reasoner and rules embedded in
the database allow the understanding of basic situa-
tion such as ”Is there a spatial obstacle on the road?”
or ”Is vehicle A overtaking vehicle B?”. A specific
HUD (Heads-Up Display) then alerts the driver on the
distance and direction of the other vehicles surround-
ing them. While functional and proving the usability
of ontologies in a vehicular environment, the SCORE
system is solely focused on space and does not con-
sider speed, an important component of vehicles. It
also has a limited set of reasoning rules and does not
actively advises the driver on the optimal decision to
take. Besides, the gathering units (called ”Federa-
tion units”) are static and have a limited range, mak-
ing them powerless if a spontaneous and unexpected
event is happening out of their reach.
Another study (Fuchs et al., 2008) worked on
a smaller scale and developed an ontology-based
context-model able to analyze a scene and quickly
present a decision recommendation. It also relied on
fuzzy logic in case of uncertainty about a situation.
The system showed good performances and included
different variables such as speed and brake intensity,
but the perception was limited to the surrounding of
the vehicle and did not include information about the
other road users. There could also have been an in-
terest in logging the generated recommendations and
compare them to the action taken by the driver, to
have the system ”learn” from previous outputs.
(Kannan et al., 2010) proposed an ontology mod-
elling approach for ADAS based on a richer context,
considering different elements such as weather and
the vehicle’s dimensions. The inputs for the simu-
lation were statically generated in XML files directly
manipulated by the team, but they proved the feasi-
bility of the concept. In another study in 2016, (Hina
et al., 2016) proposed a more complete ADAS system
embedded on a smartphone application and tested in
a state-of-the-art simulator built by European automo-
tive constructors. Being on a smartphone, the model
had none to little interaction with the other road users
and had to rely on the hosting vehicle’s sensors to
gather data.
Trying to have a model inspired from hu-
man behaviour was also studied by (Morignot and
Nashashibi, 2013). They made the point that the ve-
hicular context was not a strictly regulated one, and
that a driver might find itself in a situation where they
need to bypass traffic regulation,invoking the exam-
ple of being stuck behind a defective car with an en-
gine problem. A human driver would probably over-
step the continuous line, while an autonomous vehi-
cle could be stuck for hours. Their proposed solution
was to use a complex set of rules that would let the
vehicle detect that there is an ”illegal space” (the lane
over the continuous line) that could be used to by-
pass the problematic zone. The inferred decision took
around 350ms, an acceptable time in a non-dangerous
situation. However, and as noted by the author, ”a
drawback of an ontology-based approach is that a ve-
hicle and its environment are represented in discrete,
symbolic terms: things are true or false but there is
no way to represent something intermediate”. Those
kind of challenges have been improved in the last few
years through the use of computer intelligence, such
as deep learning algorithms(LeCun et al., 2015). An-
other point would be the vehicle’s ability to perceive
the illegal space: one of their premises was for the
cars to be able to communicate, but being behind an
opaque object still limits the sight potential, and hav-
ing other means of gathering data could be necessary
in some situations.
In 2018, (Chen and Kloul, 2018), proposed a 3-
layer ontology for an automatic generation of use
cases in a highway insertion context. They describe a
use case as ”one or several scenarios applied to func-
tional ranges and behaviors to simulate an ADAS. A
scenario describes the temporal development between
several scenes in a sequence of scenes” [sic], meaning
that a use case is the overall situation where the event
takes place, and scenarios are the different possible
outcomes that can happen in said situation. They use
specific ontologies dedicated to the highway and the
weather to describe the contextual environment, and
a third one dedicated to the vehicle for the manage-
ment of possible actions. Their study showed great
results, but the testing was not done in real-time con-
ditions, and therefore could not evaluate the speed of
the process.
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
220

This study aims to build a knowledge-base able
to correctly and quickly perceive the surroundings of
the vehicle. For validation purpose, a simulator mim-
icking real-time behaviour of a vehicle has also been
built and used for the gathering and processing of
data.
3 KNOWLEDGE BASE
The ”Principles of Modeling” (Starfield, 2005) de-
fines a model as a simplification of a real-world prob-
lem. Modelising a problem presents many advan-
tages, such as a formalization and logical description
of the problem, a better understanding of the affected
data, and a simplification of the testing procedure.
There are different ways to implement a
knowledge-based model, such as logic programming
(Jaffar and Maher, 1994), a knowledge-graph (Paul-
heim, 2016) or an expert system (Balci and Smith,
1986). This article focuses on the use of ontolo-
gies. An ontology usually serves as a hierarchical
data structure containing all the entities of a specific
context and the different rules, axioms and properties
regulating them. In addition to the technical interest,
the ontological approach shows some functional ad-
vantages that make it an interesting choice :
• Scalability: Once the classes, properties and rules
are defined, the instantiation is managed by a Java
API and it is easy to populate the ontology with
new elements
• Exportability: The knowledge-base and its ac-
tors are ultimately independent from the applica-
tion and can be used for another operation set in a
vehicular environment
Being more specific, the Stanford 101 Guide on creat-
ing an ontology (Noy and Mcguinness, 2001) defines
an ontology as ”a formal explicit description of con-
cepts in a domain of discourse, properties of each con-
cept describing various features and attributes of the
concept, and restrictions on slots”. An ontology basi-
cally defines the main actors within a domain of dis-
courses and the different interactions between them.
• Classes: Describe the concepts in the domain,
whether they are abstract ideas or physical actors.
Classes can be hierarchized by levels, for exam-
ple having a Vehicle top-class containing Car, Bus
and Bike sub-classes
• Properties: The specific information relative to
classes. They can be intrinsic to an object, or ex-
trinsic, representing the interconnections between
different concepts
• Individuals: Real instances representing the ele-
ments of the ontology.
An ontology which is completed and filled with a full
set of individuals, rules and properties is refered to
as a knowledge base. In technical terms, the knowl-
edge base is composed of the Tbox and Abox, respec-
tively Terminological Box and Assertion Box. The
former represents the ontology where the informa-
tions are stored, and the latter encompass the rules
and properties. In addition to being able to repre-
sent all the elements of a situation, it is possible to
add a layer of intelligence and reflection through the
use of reasoners. A reasoner is a tool that can in-
fer logical conclusion from a set of given facts, mak-
ing the classification of an ontology easier. For ex-
ample, if we declare an instance V as a Car, and
the class Car is a sub-class of vehicle, then the rea-
soner infers that V is a vehicle(Hina et al., 2018).
For a more complex situation, some reasoners can be
supplied by SWRL rules (Semantic Web Rule Lan-
guage) (O’Connor et al., 2008). It is a language of
logic description that enables the combination of dif-
ferent rules to build a more complex axiom. The offi-
cial documentation gives the following basic exam-
ple to define the syntax :hasParent(?x1,?x2) ˆ has-
Brother(?x2,?x3) -> hasUncle(?x1,?x3). By joining
the two axioms hasParent and hasBrother, it is possi-
ble to apply the hasUncle relation to the individuals,
hence making the individual X1 the child of X2 and
the nephew of X3.
3.1 Structure of the Model
In the context of this study, the ontology revolves
around a driving environment and was built using the
Protege software(Musen, 2015). It is an open-source
ontology editor developed by the Stanford University
and that has been established as an important tool for
knowledge management. Each actor of the environ-
ment is associated to a specific Class, including the
Vehicles and the Roads, but also physical concepts
such as overspeeding or the distance between objects.
The data are received in real-time from the sensors
(or the simulator) and transmitted once every element
is classified. The reasoner is then called upon to in-
fer an Action, which is sent back and executed by the
vehicle. The interfacing is managed by a Java appli-
cation built around the Jena API(Carroll et al., 2004),
an Apache framework dedicated to the Semantic Web,
and has been reinforced with the Java OWL API (Hor-
ridge and Bechhofer, 2011). In addition to those two
tools, the SWRLAPI(O’Connor et al., 2008) was also
used for the management of the SWRL rules. Here is
an example of a basic SWRL rule for managing over-
Driving Context Detection and Validation using Knowledge-based Reasoning
221
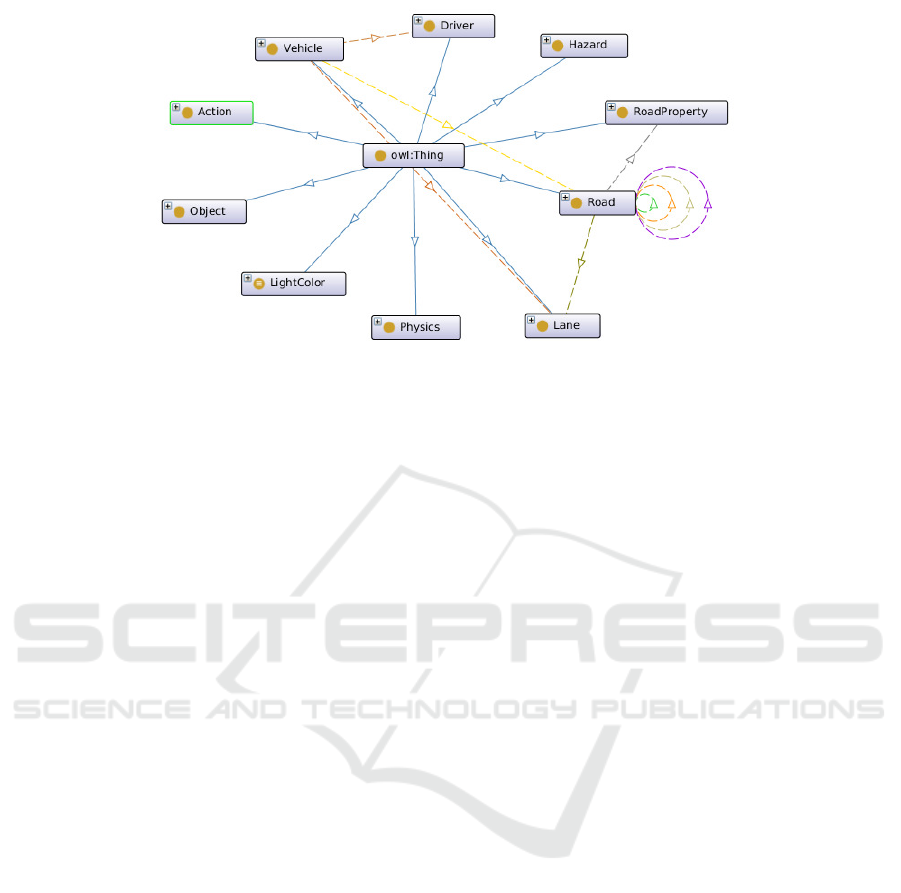
Figure 1: List of the main classes.
speeding. The pre-processing of the data and conver-
sion from numerical value to a specific class (ie. a
speed of 100km/h correspond to an overspeed situa-
tion) is done during the data gathering process.
Vehicle(?X) ˆ hasSpeed(?X, Overspeed) ˆ
hasDriver(?X, MainDriver) ˆ Action(A)
-> Brake(A)
The ontology used for this study focuses on both
the vehicle and its surroundings. As shown in Fig-
ure 1, there are many different interlinked classes, but
only a few of them make up the core of the application
• Vehicle representing the different vehicles de-
tected in the environment. The class is not limited
to cars only and has different sub-classes such as
Trucks and Bikes.
• Road and RoadProperties lists all the road seg-
ments and their potential properties, such as
SpeedLimit or WeatherCondition. Roads are also
linked between them with the ”isConnectedTo”
object property, allowing a global mapping of the
area by creating a virtual link between connected
roads, similar to the concept of doubly linked lists
• Action is the master class of all the possible ac-
tions that can be inferred by the reasoner dis-
played to the driver. They can be directive orders
such as ”Accelerate” or ”Turn Left” or informa-
tive like ”Fire Hazard Detected”.
Naturally, the main class for this application is the Ve-
hicle one, which is the one with the most relations
with the others. As shown in Figure 2, experiments
focus on a single car named MainVehicle and is the
one equipped with the ADAS feature.
• Each Vehicle has a Driver. The MainVehicle is
identified by having the MainDriver
• A Vehicle is geographically defined as being on a
specific Road. As stated above, every Road has
RoadProperties
• The class Physics contains the subclasses Speed
and DistanceFromVehicle, which is the distance
between any object and the MainVehicle
• The other entities of the road are labelled under
the Object class, which is itself split between Dy-
namicObject and StaticObject
The ontology is pre-loaded with all the necessary
classes and rules, and it is progressively populated
by individuals detected in the vehicle’s surrounding.
Considering that sensors have a detection range, only
the elements at a certain distance can be added to the
knowledge-base.
3.2 Data Fusion
Multimodal data fusion is defined by (Lahat et al.,
2015) as ”the analysis of several datasets such that
different datasets can interact and inform each other”,
effectively meaning that information from different
sources can be compared and cross-referenced to of-
fer a better understanding of the situation where an
intelligent agent is evolving. The implementation of
this process requires an architecture capable of effi-
ciently classifying data, and a necessary processing
power (Hall and Llinas, 1997). In a real driving situa-
tion, an important quantity of data needs to be consid-
ered, and most of the time they are of different type.
Being able to manage and join seemingly unrelated
information might be critical in this context. For this
study, the data fusion is made on two-levels, as illus-
trated on the Figure 3.
• The raw data are preprocessed and labelled by the
sensors of the vehicle (i.e. the simulator). This is
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
222
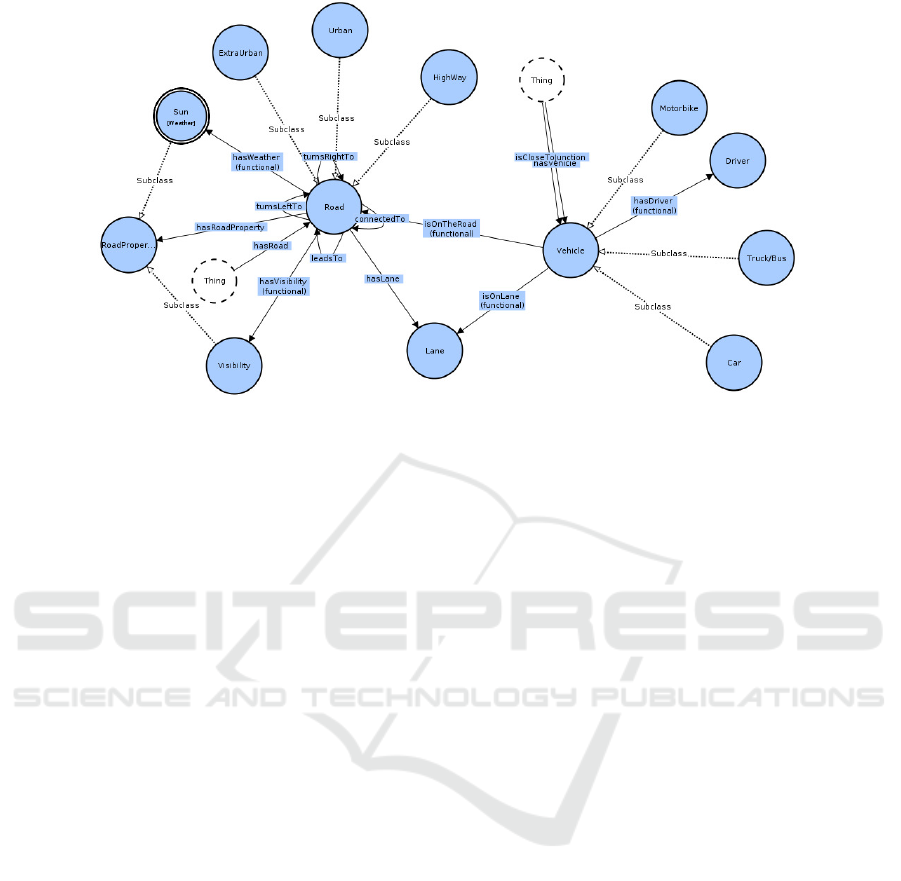
Figure 2: The Vehicle and Road Classes.
done in order to ease the processing time of the
reasoner, and this part deals with light classifica-
tion of information : If a car is going at 100km/h
on a road limited to 80km/h, then the MainVehicle
has an object property hasSpeed of Overspeed
• Through the use of SWRL rules, the ontology
can then make logical processing and fuse all the
available pre-treated information to infer a result
This study emphasizes on a model’s ability to quickly
react to random and unexpected events, hence the fo-
cus on trying to infer with the highest precision and
the fastest time. Having the vehicle’s more powerful
computing units process a part of the information can
help reach an optimal result.
4 SIMULATOR BUILDING
4.1 Environment Description
The first step in building the model is to set-up a reli-
able testing environment. The interface was based on
the Udacity(Udacity, 2017) project, a car simulator
built with the Unity engine(Haas, 2014). It allows the
building of driving surroundings (Roads, obstacles)
and both manual and automatic driving of vehicle.
The simulation file is then read by a Java pro-
gram that will interface the simulator and the ontol-
ogy. Most of the libraries used come from the Protege
application project. Data about the driving simulation
can then be recorded in order to be processed. They
are formatted into JSON to make their interpretation
easier by the ontology.
An ontology containing the information related to
the driving context is then setup. It includes the dif-
ferent classes of road users: Vehicles, Pedestrians...
and their numerous properties, such as their Speed or
their distance from the main vehicle.
The ontology reads the simulation data in near
real-time and based upon the set of SWRL rules it
contains, the reasoner can infer an ”Action” class into
one of the possible outcomes : Brake, Accelerate,
Turn Left, Turn Right, Remain in Lane, Change Lane,
Bad Weather and Fire Hazard.
Based to the inferred action, basic instructions are
then generated and written in another text file that will
be accessed back by the simulator used to direct the
vehicle’s movements. This is used for the automatic-
driving option. In the manual mode, the informations
are directly displayed on the screen for the driver to
see.
4.2 Unity Environment
The simulation environment was built on Unity, based
on the Udacity open-source driver simulator. The
Udacity project shows mathematically-accurate driv-
ing physics and comes with a set of pre-existing maps
and the necessary tools for building one’s own envi-
ronment.
Driving Context Detection and Validation using Knowledge-based Reasoning
223
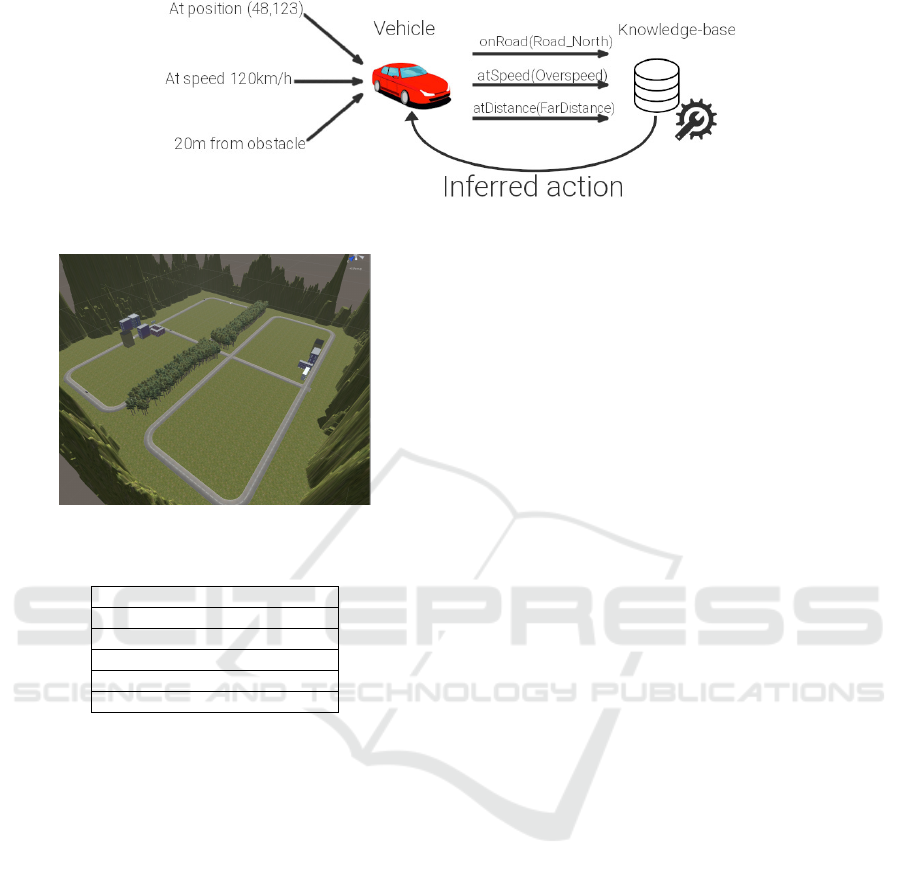
Figure 3: Illustration of the data fusion process.
Figure 4: Global view of the simulated environment.
Table 1: Data relative to the road object.
Type of the data
Name of the road
Speed limit
Weather situation
Is it connected to another road?
Is another object present on it?
5 MODEL TESTING
5.1 Use Case Presentation
The simulator allows quick development of testing
scenarios. The one considered in this study consist
of 2 circular roads linked by a middle path. There
are also natural environment objects like buildings or
traffic signs and the environment is populated by dy-
namic actors such as moving and stopped vehicles
and scripted pedestrians that randomly cross the road.
In order to bring more realism to the situation, unex-
pected events are also prone to happen: Rain can start
pouring on a road and a building can catch fire. All
those elements have their own dedicated classes and
instances in the knowledge base.
The simulation has for objective to validate that
the knowledge base functions properly. The vehicle
gathers raw data and convert them into a machine-
readable format (Brioschi, 2016). They are then pro-
cessed by the SWRL rules and inform the driver in
real-time of the surrounding situation. There can be
multiple information inferred at a given time. If the
vehicle is overspeeding and a fire happens, they will
be informed of both events. Speed control is the most
controlled variable, continuously informing the driver
of what they should do.
5.2 Tests and Results
The tests were conducted by having a human opera-
tor manually drive the vehicle around the map while
having the logging and processing API running in par-
allel. The reason for choosing manual driving instead
of automatic is because the accuracy of a human is
superior and less prone to deadlock, and this mode
makes it easier to forcibly generate events that other-
wise depends on luck, like raining event. The driving
recommendations are still displayed on the screen and
monitored by the driver. The experiment requires to
have both the Java API and the Unity project running
at the same time: The simulator gathers the data and
the Java program process them. In order to validate
the behaviour in the concept, two scenarios are con-
sidered : An easy situation right at the beginning of
the experiment, and another one in a more complex
situation.
5.2.1 First Scenario
The first testing is done right at the launch of the sim-
ulator. The vehicle is stopped in the middle of a rainy
road. The vehicle is stopped, prompting the ontology
to detect a speed value of NoSpeed and inferring the
”Accelerate” action. The spawning spot also presents
heavy rain, which is detected by the ”Bad Weather”
inferred class. The following rules are applied:
Road(?Y)ˆ Vehicle(?X) ˆ hasWeather(?Y, Rain)ˆ
isOnTheRoad(?X, ?Y) ˆ Action(?Z) ->
BadWeather(?Z)
Vehicle(?X) ˆ hasSpeed(?X, NoSpeed) ˆ
hasDriver(?X, MainDriver) ˆ Action(Z) ->
Accelerate(Z)
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
224

5.2.2 Second Scenario
In order to test the model in a stressful situation, the
second experiment is led in a more stressful scenario
illustrated in Figure 5. The vehicle is on a road limited
to 80km/h and going at almost 90km/h, hence over-
speeding. In addition to that, one of the buildings in
the detection range is on fire, prompting the following
rule:
Building(?B) ˆ isOnFire(?B, Fire) ˆ
Action(?Z) -> FireHazard(?Z)
Figure 5: A stressful situation in the simulation.
Both those elements are gathered by the sensors
and logged in the knowledge base. The Java appli-
cation output those results in real time, as shown in
Figure 6.
Figure 6: Output from the Java API.
5.3 Discussion
The inferring process showed great results, almost al-
ways inferring the correct situation. The few mis-
taken cases were either due to a delay in the logging
and computation or a corruption of the knowledge
base. On the other hand, the execution time proved
to greatly depend on the situation. As shown in Fig-
ure 7, the first execution takes an important amount of
time of around 3300ms, which makes sense consider-
ing the required time to load the knowledge base in
the application and start the reasoner. The execution
time then stabilizes at around 750ms and can decrease
to 560ms when the car is stopped in an isolated area,
meaning the newly gathered data are similar to the
previous state. On the opposite, in a stressful situa-
tion where the car is over-speeding in an urban area
and a fire hazard is detected (ie. Figure 5), the pro-
cessing time can reach up to 2200ms.
0 20 40
60
80 100
1,000
2,000
3,000
4,000
Running time (s)
Execution time (ms)
Figure 7: Computed inferring time.
The tests were run on an Ubuntu OS with an Intel
i7-8550 CPU and 16GB of RAM memory. The com-
putation time between every inference might seem
high, with an average of 1s, but it is interesting to
note that no optimizations were made : The data were
renewed between each frame of the simulator, and the
knowledge base was rebuilt anew each time. This
constitutes a stressful situation for the system, and in
rare instances the fast reading/writing rhythm caused
a corruption of the knowledge base. Those issues can
be fixed by optimizing both the gathering process and
the Java code.
6 CONCLUSION AND FUTURE
WORKS
This work presented a knowledge-base model able to
accurately infer the situation surrounding the vehicle.
The model was validated through the use of a simula-
tor where mathematically realistic data were gathered
and processed. The different elements were managed
by a Java application. The results were highly en-
couraging, however some axes of improvement can
already be identified: Improving the processing time,
making the vehicle fully autonomous and expand the
set of rules.
In addition to the previous points, this work
falls under the scope of a larger project involving
drone/vehicle interactions and wireless communica-
tion. Many steps are still necessary before the com-
pletion of the project, and both the simulator and
knowledge base are bound to evolve in the future.
Driving Context Detection and Validation using Knowledge-based Reasoning
225

ACKNOWLEDGEMENT
This work was conducted using the Prot
´
eg
´
e resource,
which is supported by grant GM10331601 from the
National Institute of General Medical Sciences of the
United States National Institutes of Health.
REFERENCES
Balci, O. and Smith, E. P. (1986). Validation of expert sys-
tem performance. Technical report, Department of
Computer Science, Virginia Polytechnic Institute &
State . . . .
Brioschi, G. (2016). Autonomous smart secured interac-
tive automobile (assia). a knowledge based system for
driving assistance. Politecnico di Milano.
Carroll, J. J., Dickinson, I., Dollin, C., Reynolds, D.,
Seaborne, A., and Wilkinson, K. (2004). Jena: Im-
plementing the semantic web recommendations. In
Proceedings of the 13th International World Wide
Web Conference on Alternate Track Papers & Posters,
WWW Alt. ’04, page 74–83, New York, NY, USA.
Association for Computing Machinery.
Chen, W. and Kloul, L. (2018). An Ontology-based
Approach to Generate the Advanced Driver Assis-
tance Use Cases of Highway Traffic:. In Proceed-
ings of the 10th International Joint Conference on
Knowledge Discovery, Knowledge Engineering and
Knowledge Management, pages 75–83, Seville, Spain.
SCITEPRESS - Science and Technology Publications.
Chokshi, N. (2020). Tesla autopilot system found probably
at fault in 2018 crash. New York Times.
Collins, A. M., . Q. M. R. (1969). Retrieval time from se-
mantic memory. journal of verbal learning and verbal
behavior.
Fuchs, S., Rass, S., and Kyamakya, K. (2008). Integration
of Ontological Scene Representation and Logic-Based
Reasoning for Context-Aware Driver Assistance Sys-
tems. Electronic Communications of the EASST, page
Volume 11: Contextaware Adaption Mechanisms for
Pervasive and Ubiquitous Services. Publisher: Euro-
pean Association of Software Science and Technol-
ogy.
Haas, J. K. (2014). A history of the unity game engine.
Hall, D. L. and Llinas, J. (1997). An introduction to multi-
sensor data fusion. Proceedings of the IEEE, 85(1):6–
23.
Hina, M. D., Hongyu Guan, Ramdane-Cherif, A., and Nan
Deng (2016). Secured data processing, notification
and transmission in a human-vehicle interaction sys-
tem. In 2016 IEEE 19th International Conference
on Intelligent Transportation Systems (ITSC), pages
1277–1284, Rio de Janeiro, Brazil. IEEE.
Hina, M. D., Thierry, C., Soukane, A., and Ramdane-
Cherif, A. (2018). Cognition of Driving Context for
Driving Assistance. 12(2):11.
Horridge, M. and Bechhofer, S. (2011). The OWL API:
A Java API for OWL ontologies. Semantic Web,
2(1):11–21.
Jaffar, J. and Maher, M. J. (1994). Constraint logic program-
ming: a survey. The Journal of Logic Programming,
19-20:503–581.
Kannan, S., Thangavelu, A., and Kalivaradhan, R. (2010).
An Intelligent Driver Assistance System (I-DAS) for
Vehicle Safety Modelling using Ontology Approach.
IJU, 1(3):15–29.
Lahat, D., Adali, T., and Jutten, C. (2015). Multimodal
data fusion: an overview of methods, challenges, and
prospects. Proceedings of the IEEE, 103(9):1449–
1477.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521(7553):436–444.
Morignot, P. and Nashashibi, F. (2013). An Ontology-
based Approach to Relax Traffic Regulation for Au-
tonomous Vehicle Assistance. In Artificial Intelli-
gence and Applications / 794: Modelling, Identifica-
tion and Control / 795: Parallel and Distributed Com-
puting and Networks / 796: Software Engineering /
792: Web-based Education, Innsbruck, Austria. AC-
TAPRESS.
Musen, M. A. (2015). The prot
´
eg
´
e project: a look back and
a look forward. AI Matters, 1(4):4–12.
Neoklis Polyzotis, Sudip Roy, S. W. M. Z. (2017). Data
management challenges in production machine learn-
ing.
Noy, N. and Mcguinness, D. (2001). Ontology development
101: A guide to creating your first ontology. Knowl-
edge Systems Laboratory, 32.
O’Connor, M., Nyulas, C., Shankar, R., Das, A., and
Musen, M. (2008). The SWRLAPI: A Development
Environment for Working with SWRL Rules. page 5.
Paulheim, H. (2016). Knowledge graph refinement: A
survey of approaches and evaluation methods. SW,
8(3):489–508.
Starfield, T. (2005). Principles of modeling: Real world -
model world. University of Vermont Lectures.
Tesorero, A. (2019). Dubai’s driverless cab now on trial run.
Khaleej Times.
T
¨
onnis, M., Fischer, J.-G., and Klinker, G. (2008). From
Sensors to Assisted Driving – Bridging the Gap. JSW,
3(3):71–82.
Udacity (2017). Udacity self-driving car project. https://
github.com/udacity/self-driving-car-sim.
Veres, S. M., Molnar, L., Lincoln, N. K., and Morice, C. P.
(2011). Autonomous vehicle control systems — a re-
view of decision making. Proceedings of the Institu-
tion of Mechanical Engineers, Part I: Journal of Sys-
tems and Control Engineering.
KEOD 2020 - 12th International Conference on Knowledge Engineering and Ontology Development
226
