
Freestyle Swimming Analysis of Symmetry and Velocities using a
MEMS based IMU: Introducing a Symmetry Score
Andy Stamm
1,2 a
and Igor Shlyonsky
3
1
Faculty of Technology and Bionics, Rhine-Waal University of Applied Sciences, 47533 Cleve, Germany
2
Griffith School of Engineering, Griffith University, 4111 Nathan, QLD, Australia
3
MySwimEdge, CA, U.S.A.
Keywords: Swimming, Freestyle, Symmetry, Velocity, IMU, Freestyle Symmetry Score.
Abstract: MEMS sensors (IMU’s) are widely available nowadays and tend to be used more often in sports monitoring.
Especially in swimming these sensors have seen rapid development in the past years. These sensors have very
good measurement capabilities today, but the automatic analysis of the gathered data has not yet been
implemented. Our objective is to develop and validate an automatic analysis which can provide the
swimmers/coaches with nearly immediate feedback on a smartphone/tablet. Ten swimmers ranging from
novice to elite have been participating in this study performing freestyle in either 25m or 50m pools. All trials
were recorded with a 3-axis accelerometer. The symmetry parameters have been extracted from the recorded
data after these were high-pass filtered to remove the gravity from the signal and a zero crossing detection
algorithm was applied. The results showed a very strong relation to results obtained by other researchers.
1 INTRODUCTION
Since many years, the performance of athletes in
swimming was evaluated by coaches sometimes
under the help of bulky and complex equipment such
as (multi) video camera systems and/or tethered
velocity meters (Craig & Pendergast, 1979; Craig,
Termin, & Pendergast, 2006; Stamm, Thiel, Burkett,
& James, 2009). Operating such equipment usually
needs a special trained person and additionally one
expert for the data analysis, thus not allowing using
this equipment on a regular basis. Furthermore a
tethered device allows only investigating the
movement into one direction; namely only one
swimming lap at a time. This leads to athletes/coaches
not using this equipment very often.
Nowadays athletes have become too competitive and
sometimes a tenth of a second can decide upon
gaining the next better place (Dadashi, Millet, &
Aminian, 2013; Magalhaes, Vannozzi, Gatta, &
Fantozzi, 2015) thus pushing the needs to monitor
basically each training session or competition.
a
https://orcid.org/0000-0002-9331-7431
Inertial Measurement Units (IMU’s) have become
smaller in size and lighter in weight in recent years,
allowing using such devices without any disturbance
and performance problems. These devices are
nowadays waterproof, easy to use (can be placed by
the athlete) and are able to record multiple training
sessions (Callaway, 2015; Guignard, Rouard,
Chollet, & Seifert, 2017; Stamm & Thiel, 2015).
IMU’s can nowadays be used to find key factors such
as stroke rate, split times, mean velocity, and arm
symmetry. The last one has only been presented by
(Stamm & Thiel, 2015) and is still novel in swimming
research purely based on IMU’s.
This research used a sacrum mounted MetaMotionC
IMU (mbientlab, 2020) packaged in a waterproof
casing to find the 3-axis acceleration dynamics of the
swimmer. These data were used for automatic
processing to find symmetry variables for further
investigations and analysis. The objective of this
research was to develop and validate an automatic
analysis with the introduction of symmetry scores for
immediate feedback to the athlete on a
smartphone/tablet.
38
Stamm, A. and Shlyonsky, I.
Freestyle Swimming Analysis of Symmetry and Velocities using a MEMS based IMU: Introducing a Symmetry Score.
DOI: 10.5220/0010134700380043
In Proceedings of the 8th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2020), pages 38-43
ISBN: 978-989-758-481-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 METHODS
2.1 Instrumentation
This study used a MetaMotionC 9-axis IMU with 3-
axis accelerometer, 3-axis gyroscope, 3-axis
magnetometer, barometer, and light sensor. It comes
with built in Bluetooth for real time streaming and
communication, internal memory for data storage, a
CR2032 battery which last up to 48 hours of
recording, a weight of less than 7g, and physical
dimensions of 25 mm x 25 mm x 4 mm (width, height,
depth) in a standard casing.
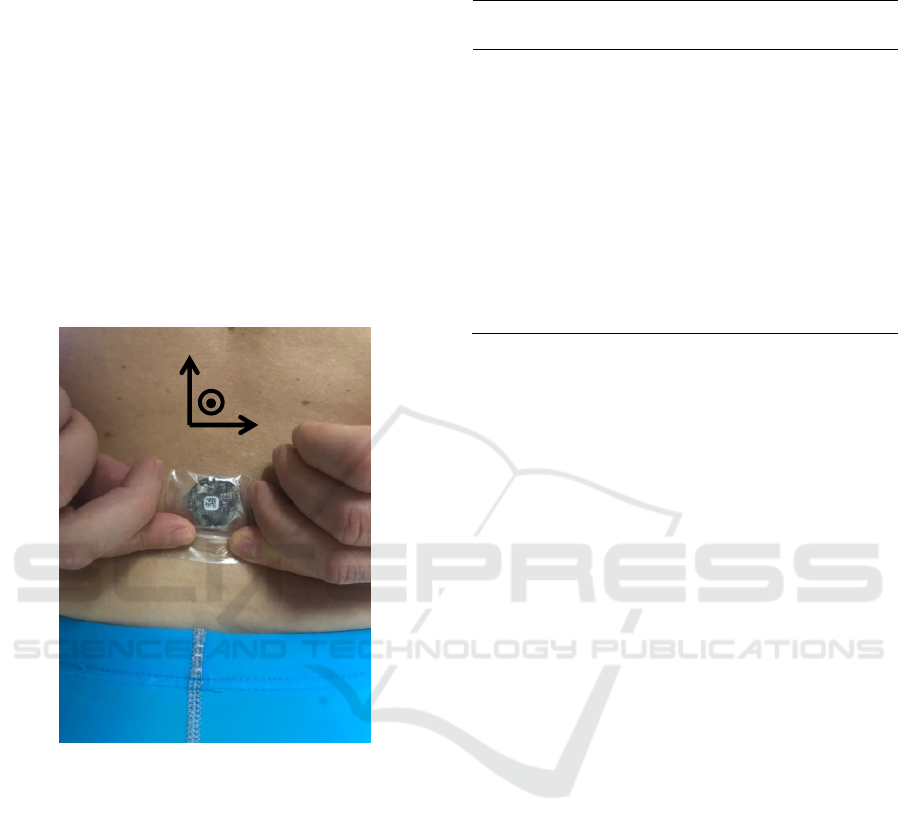
Figure 1 shows the sensor placed at the swimmer. The
IMU was set at 100 Hz sampling rate.
Figure 1: Sensor position and orientation at the swimmer.
2.2 Data Collection
Ten swimmers (9 males, 1 female, 37.5±12.4 years,
179.4±6.5 cm, 76.4±11.7 kg, see Table 1) with
different levels of experience took part in this study.
The experiments have been carried out in line with
the Helsinki protocol for human research.
Data were collected at a 25m temperature controlled
indoor pool. The swimmers where asked to perform
an individual warm-up procedure to reduce the risk of
injuries before they swam four laps which were
recorded at different efforts. We expected a large
variability as the efforts have been self-determined by
the swimmers (low, medium, and full).
In this study, the IMU was taped firmly to the lower
back of the swimmer to reduce unwanted IMU
Table 1: List of swimmers with their height, mass, age and
experience.
Swimmer Height
(cm)
Mass
(kg)
Age
(years)
Experience Gender
1 183 79 29 international male
2 168 53 49 amateur female
3 172 82 37 amateur male
4 182 82 48 intermediate male
5 192 82 23 amateur male
6 178 81 52 amateur male
7 183 79 29 international male
8 183 85 26 national male
9 175 80 44 amateur male
10 180 90 51 amateur male
movements and to minimize skin movements. The
forward direction is represented by the a
y
, the
mediolateral direction by a
x
, and the anterior-
posterior direction by a
z
.
The data were downloaded via Bluetooth at the end
of each training session using the App “MetaBase”
provided by Mbientlab on an Android device. The
downloaded data were then further send via email to
the analysis team.
2.3 Data Processing
Data processing was automatically undertaken using
multiple Python scripts which were programmed to
find important parameters to athletes and coaches.
The acceleration data recorded by the IMU and sent
via email to the analysis team was firstly converted to
gravitational units before it was high-pass filtered
with a cut-off frequency of 0.3 Hz to seperate the
sensor orientation from the wanted acceleration
signal (James & Wixted, 2011; Stamm, James, &
Thiel, 2012; Stamm & Thiel, 2015; Stamm, Thiel,
Burkett, & James, 2011). This filter was applied to
remove the gravity signal form the acceleration
signal. A zero crossing algorithm was further applied
to the data to automatically separate the left and right
arm strokes.
Figure 2 shows the recorded acceleration signal for
one swimmer (blue) with the present sensor
orientation component (red) which was removed
from the recorded signal before it was further
processed. The zero crossing algorithm was then
applied to the gravity corrected mediolateral
acceleration data (body-roll) to find the individual left
and right arm strokes (see Figure 3).
a
y
a
x
a
z
Freestyle Swimming Analysis of Symmetry and Velocities using a MEMS based IMU: Introducing a Symmetry Score
39
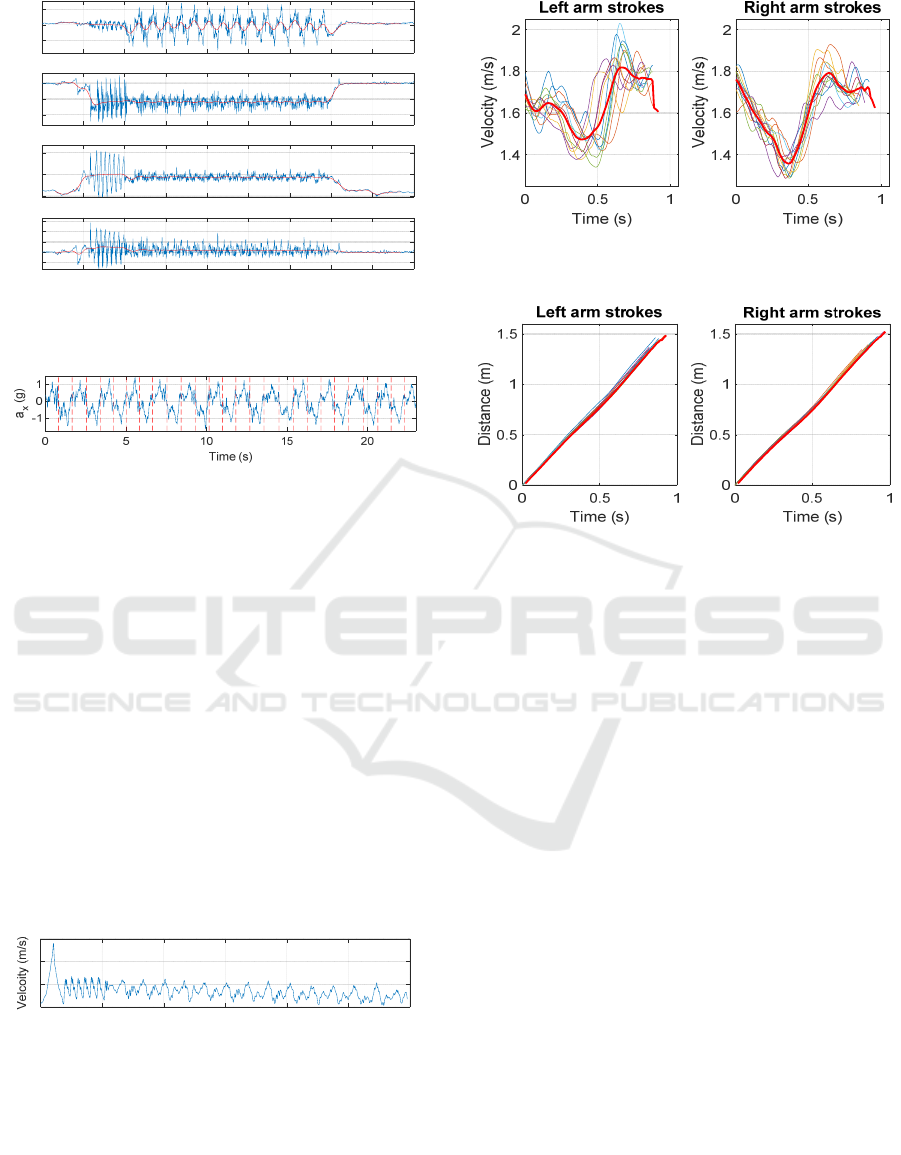
Figure 2: Raw acceleration (blue) with the overlapping
gravity component (red).
Figure 3: Gravity corrected body-roll acceleration signal
(blue) with the overlapping zero-crossing detection result
(red).
A lap velocity and lap distance profile were
calculated as described by (Stamm et al., 2012) to
investigate the symmetry of the swimmer in terms of
timing, max/min arm velocity, distance, stroke rate,
and stroke length.
Figure 4 presents a typical lap velocity profile for a
25m freestyle swimming lap with the push-off phase,
swimming phase, and the stop phase. The focus for
the automatic symmetry detection was hereby set on
the swimming phase. The algorithm was set to detect
the second stroke at the start, as sometimes the first
stroke coincides with the push-off phase which leads
to a slightly disturbed acceleration signal, and to stop
at the second last stroke, as the last stroke quite often
coincides with the stop of the lap.
Figure 4: Lap velocity profile of a 25m freestyle swimming
lap.
Figure 5 shows a typical left and right arm intra-
stroke velocity profile extracted from a 50m freestyle
swimming phase whereby Figure 6 presents the left
and right arm distance extracted from the lap distance
profile after the zero-crossing detection algorithm
was applied.
Figure 5: Left (a) and right (b) arm intra-stroke velocities of
the swimming phase of a 25m freestyle swimming lap.
Figure 6: Left (a) and right (b) arm distances of the
swimming phase of a 50m freestyle swimming lap.
The investigated symmetries are now translated into
a simple symmetry score for the three individual
investigated parameters (stroke duration, length,
velocity) so that the swimmer can directly interpret
the score to help improving the swimming style (see
equation 1-3).
It needs to be mentioned that the symmetry scores
have been calculated using average left and right arm
timings, lengths, and velocities.
t
s
y
mmert
y_
score
= 1 – (t
left
_
ar
m
– t
ri
g
ht
_
ar
m
) (1
)
Equation 1 describes the symmetry score for the
stroke duration considering the difference between
the left and right arm stroke. An ideal symmetry
would therefore always provide the result t=1, while
t<1 would present longer left arm stroke duration, and
t>1 would present a longer right arm stroke duration.
l
s
y
mmert
y_
score
= 1 – (l
left
_
ar
m
– l
ri
g
ht
_
ar
m
) (2
)
Equation 2 describes the symmetry score for the
length of the stroke considering the difference
between the left and right arm stroke. An ideal
symmetry would be described by l=1, while l<1
would describe a longer left arm distance and l>1
would describe a longer right arm distance.
v
s
y
mmert
y_
score
= 1 – (v
left
_
ar
m
– v
ri
g
ht
_
ar
m
) (3
)
0 5 10 15 20 25 30 35 40 45
-1
0
1
a
x
(g)
0 5 10 15 20 25 30 35 40 45
-1
0
1
a
y
(g)
0 5 10 15 20 25 30 35 40 45
0
1
2
a
z
(g)
0 5 10 15 20 25 30 35 40 45
Time (s)
0.5
1
1.5
2
2.5
a
tot
(g)
0 5 10 15 20 25 30
Time (s)
1
2
3
4
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
40
Table 2: Left and right arm mean stroke durations, stroke lengths, and average velocities including the standard deviation
(SD) for the first lap of each swimmer.
Swimmer LEFT Arm Right Arm Left Arm Right Arm Left Arm Right Arm
Stroke Duration
(s) ± SD
Stroke Duration
(s) ± SD
Length (m)
± SD
Length (m)
± SD
Velocity
(m/s) ± SD
Velocity (m/s) ± SD
1 1.21 ± 0.11 0.98 ± 0.03 2.41 ± 0.31 1.85 ± 0.09 1.96 ± 0.18 1.89 ± 0.24
2 1.07 ± 0.13 1.12 ± 0.10 0.83 ± 0.10 0.88 ± 0.08 0.79 ± 0.07 0.79 ± 0.11
3 0.82 ± 0.07 0.83 ± 0.07 0.83 ± 0.07 0.89 ± 0.11 1.02 ± 0.13 1.06 ± 0.19
4 0.95 ± 0.10 0.99 ± 0.06 1.19 ± 0.12 1.28 ± 0.07 1.26 ± 0.19 1.29 ± 0.20
5 1.01 ± 0.09 0.86 ± 0.05 1.08 ± 0.11 0.92 ± 0.07 1.07 ± 0.10 1.06 ± 0.12
6 0.84 ± 0.04 0.96 ± 0.06 0.94 ± 0.05 1.08 ± 0.06 1.13 ± 0.24 1.12 ± 0.23
7 1.32 ± 0.18 1.51 ± 0.29 1.21 ± 0.21 1.31 ± 0.21 0.91 ± 0.15 0.87 ± 0.18
8 1.11 ± 0.07 1.07 ± 0.04 1.39 ± 0.10 1.23 ± 0.04 1.26 ± 0.14 1.17 ± 0.11
9 0.90 ± 0.09 0.93 ± 0.09 0.80 ± 0.08 0.80 ± 0.08 0.88 ± 0.12 0.87 ± 0.10
10 1.38 ± 0.06 1.36 ± 0.04 1.21 ± 0.07 1.14 ± 0.06 0.88 ± 0.13 0.83 ± 0.11
Equation 3 describes the symmetry score for the
average stroke velocity considering the difference
between the left and the right arm. An ideal symmetry
would be described by v=1, while v<1 would describe
a faster left arm velocity and v>1 would describe a
faster right arm velocity.
It should be noted that larger deviations come from
the fact that the symmetry scores were not
normalised.
All automatic calculations have been validated
against manual data analysis undertaken in MATLAB
as described by (Stamm et al., 2012). There has been
no significant difference between the automatic and
manual data analysis found.
3 RESULTS
A total of 30 freestyle swimming laps have been
analyzed for the participants (see
Table 1).
The zero-crossing detection algorithm applied to the
acceleration, lap velocity, and lap distance profile
data allowed the separation of left- and right arm
strokes, thus allowed the symmetry investigation of
the involved swimmers with the results of the first
swim of each swimmer being presented in Table 2.
The symmetry scores were calculated according to
equations 1-3 which have been described in the
previous chapter and are presented in Table 3. It can
be seen that the symmetry scores for swimmers who
had a large difference between the left and right arm
duration/length/velocity are significantly below or
above the ideal score of 1.
Table 3: Symmetry scores for the first lap of each swimmer
calculated under usage of mean stroke time, length, and
velocity
Swimmer
Time
symmetry
score
Length
symmetry
score
Velocity
symmetry
score
1 0.77 0.44 0.93
2 1.05 1.05 1.00
3 1.02 1.06 1.05
4 1.04 1.09 1.04
5 0.85 0.84 1.00
6 1.12 1.14 1.00
7 1.19 1.10 0.97
8 0.96 0.84 0.91
9 1.02 1.00 0.99
10 0.98 0.93 0.96
Whereby a score smaller 1 for the stroke duration
means that the left arm took longer, a score smaller 1
for the length means that the left arm traveled a longer
distance, and a score smaller 1 for the average
velocity meant that the left arm had reached a larger
velocity.
For the purpose of swimming methodology more
attention should be given to the situations where all
three scores are either smaller or larger than 1.
4 CONCLUSIONS
The arm symmetry of ten swimmers performing
freestyle swimming laps with different levels of
experience has been investigated using a MEMS
based IMU. The recorded tri-axial acceleration signal
was firstly high-pass filtered to remove the unwanted
gravity component of the acceleration signal. The
gravity corrected acceleration signal was then used to
Freestyle Swimming Analysis of Symmetry and Velocities using a MEMS based IMU: Introducing a Symmetry Score
41

calculate the lap velocity profile using an
approximation to the numerical integration as well as
the lap distance profile (Stamm et al., 2012). A zero-
crossing detection algorithm was then applied to
separate the left from the right arm strokes to facilitate
the arm symmetry investigations. The results found
average left and right arm velocities in the range from
0.53 m/s up to 2.08 m/s which goes in line with (Craig
& Pendergast, 1979; Craig et al., 2006; Stamm et al.,
2011).
It was further proposed to introduce three simple
numbers to provide (amateur) swimmers with an
index to show them potential improvements in their
applied swimming style. The three symmetry scores
have been based on the automatic analysis of freestyle
swimming laps and the parameters: stroke timings;
stroke length; and average stroke velocity. The
simplicity of the proposed symmetry scores reflects
in a simple way of interpretation as a perfect
symmetry would be reflected by the score 1. A
smaller score meant that the left arm took longer in
terms of arm timing; that the left arm had a longer
distance, and that the left arm had reached a higher
velocity, respectively. A score larger 1 reflects the
symmetry shift towards the right arm.
Considering the simplicity of the proposed symmetry
scores, it can be understood by every swimmer and
directly translated to a change in the swimming style
to further improve the technique.
First feedback was sought by the authors from
swimmers participated in that study and proofed that
this simple symmetry numbers were widely accepted
by the participants as an easy and understandable
symmetry score.
It is evident that the proposed methods present simple
symmetry scores and that they can be used to help
swimmers improving their swimming style. It can be
concluded that this simple method can be used to
substitute more complex equipment and therefore
help the swimmer to easily improve their swimming
symmetry.
The next step would be to involve coaches to be able
to have their feedback to further improve the methods
applied and optimise the form of presentation. This
could be i.e. to provide the swimmers with a simple
to use app to which the IMU can be connected to
start/stop the recording; upload the data for an
automatic analysis; and a graphical presentation of
the results, and individual stroke analysis. All of this
should be made available to the swimmer within
minutes to be able to change the swimming style
while still performing the training session.
ACKNOWLEDGEMENTS
The authors would like to thank all swimmers who
participated in this study.
REFERENCES
Callaway, A. J. (2015). Measuring Kinematic Variables in
Front Crawl Swimming Using Accelerometers: A
Validation Study. Sensors, 15(5).
doi:10.3390/s150511363
Craig, A. B. J., & Pendergast, D. R. (1979). Relationships
of stroke rate, distance per stroke, and velocity in
competitive swimming. Medicine & Science in Sports
& Exercise, 11(3), 278-283. Retrieved from
http://journals.lww.com/acsm-
msse/Fulltext/1979/01130/Relationships_of_stroke_rat
e,_distance_per_stroke,.11.aspx
Craig, A. B. J., Termin, B., & Pendergast, D. R. (2006).
Simultaneous recordings of velocity and video during
swimming. Portugese Journal of Sport Sciences, 6, 32-
36.
Dadashi, F., Millet, G., & Aminian, K. (2013). Inertial
measurement unit and biomechanical analysis of
swimming: an update. 61, 21-26. Retrieved from
http://infoscience.epfl.ch/record/189819/files/Sportme
dizin%20-%20Dadashi%20et%20al-%202013.pdf
Guignard, B., Rouard, A., Chollet, D., & Seifert, L. (2017).
Behavioral Dynamics in Swimming: The Appropriate
Use of Inertial Measurement Units. Frontiers in
Psychology, 8, 383. Retrieved from
https://www.frontiersin.org/articles/10.3389/fpsyg.201
7.00383
James, D. A., & Wixted, A. (2011). ADAT: A Matlab
toolbox for handling time series athlete performance
data. Procedia Engineering, 13, 451-456.
doi:10.1016/j.proeng.2011.05.113
Magalhaes, F. A. d., Vannozzi, G., Gatta, G., & Fantozzi,
S. (2015). Wearable inertial sensors in swimming
motion analysis: a systematic review. Journal of Sports
Sciences, 33(7), 732-745.
doi:10.1080/02640414.2014.962574
mbientlab. (2020). MetaMotionC (MMC). Retrieved from
https://mbientlab.com/metamotionc/
Stamm, A., James, D., & Thiel, D. (2012). Velocity
profiling using inertial sensors for freestyle swimming.
Sports Engineering, 1-11. doi:10.1007/s12283-012-
0107-6
Stamm, A., Thiel, D., Burkett, B. J., & James, D. A. (2009).
Roadmapping performance enhancement measures and
technology in swimming. The Impact of Technology in
Sport II, 213-217. Retrieved from
icSPORTS 2020 - 8th International Conference on Sport Sciences Research and Technology Support
42

http://research.usc.edu.au/vital/access/manager/Reposi
tory/usc:6000
Stamm, A., & Thiel, D. V. (2015). Investigating Forward
Velocity and Symmetry in Freestyle Swimming Using
Inertial Sensors. Procedia Engineering, 112, 522-527.
doi:http://dx.doi.org/10.1016/j.proeng.2015.07.236
Stamm, A., Thiel, D. V., Burkett, B., & James, D. A.
(2011). Towards determining absolute velocity of
freestyle swimming using 3-axis accelerometers.
Procedia Engineering, 13, 120-125.
doi:10.1016/j.proeng.2011.05.061
Freestyle Swimming Analysis of Symmetry and Velocities using a MEMS based IMU: Introducing a Symmetry Score
43
