
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows
based on Evolutionary Approach and Reinforcement Learning
Mikhail Melnik, Ivan Dolgov and Denis Nasonov
ITMO University, Saint-Petersburg, Russia
Keywords:
Workflow Scheduling, Stream Data, Cloud Computing, Supercomputer, Hybrid Approach, Evolutionary
Computing, Reinforcement Learning.
Abstract:
Scheduling of workload in distributed computing systems is a well-known optimization proble. A workload
may include single independent software packages. However, the computational process in scientific and
industrial fields is often organized as composite applications or workflows which are represented by collection
of interconnected computing packages that solve a common problem. We identified three common computing
modes: batch, stream and iterative. The batch mode is a classic way for one-time execution of software
packages with an initially specified set of input data. Stream mode corresponds to launch of a software package
for further continuous processing of active data in real time. Iterative mode is a launching of a distributed
application with global synchronization at each iteration. Each computing mode has its own specifics for
organization of computation process. But at the moment, there are new problems that require organization
of interaction between computing modes (batch, stream, iterative) and to develop optimization algorithms for
this complex computations that leads to formation of heterogeneous workflows. In this work, we present a
novel developed hybrid intellectual scheme for organizing and scheduling of heterogeneous workflows based
on evolutionary computing and reinforcement learning methods.
1 INTRODUCTION
This research is associated with an intensive in-
crease in the performance of computing systems (CS)
through the use of global distributed computing tech-
nologies for scientific and industrial computing, and
the simultaneous complication and expansion of the
scope of computing applications in research. Cur-
rently, the issue of introducing CS with exaflops per-
formance by 2024 is being discussed, which leads not
only to an increase in the number of computing el-
ements, but also to the complexity of their architec-
ture. Effective use of this kind of CS is a non-trivial
scientific task. The computational process in the sci-
entific and industrial fields is often not limited to the
launch of a single computing package. Global dis-
tributed computing technologies deal with compos-
ite applications (CA) or workflows (WF), which are
a set of interconnected services in a distributed en-
vironment that solve a common problem. CA ser-
vices are represented by different software solutions
working on various architectures, operating systems,
and developed by different teams using various tech-
nologies. This is the main source of heterogeneity
of computations in global distributed environments.
At the same time, the complexity of organization of
computations includes the requirement to share spe-
cialized resources, such as: graphic processors, super-
computers, elements that allow you to perform com-
putation with dynamically changing workload of in-
dividual parts of the CA.
Here we identify three common computing
modes: batch, stream and iterative. The batch mode
is a classic way for one-time execution of software
packages with an initially specified set of input data.
Stream mode corresponds to launch of a software
package for further continuous processing of active
data in real time. Stream data processing can be found
everywhere in our modern world. For example, data
from social media, Internet of Things, many web ser-
vices. Using cloud computing is the most popular op-
tion to perform data processing in the stream mode.
Iterative mode is a launching of a distributed applica-
tion with global synchronization at each iteration, un-
til which distributed blocks process their part of calcu-
lations. Iterative mode is more common for scientific
community, for example complex multiscale models
which often are executing in supercomputer environ-
200
Melnik, M., Dolgov, I. and Nasonov, D.
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning.
DOI: 10.5220/0010112802000211
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 200-211
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ments.
In addition, the situation is complicated by the
need to organize interaction between heterogeneous
modes of computing and data processing (batch,
streaming, iterative). That is why we formed a con-
cept of heterogeneous workflows (HWF). Heteroge-
neous workflow is a WF which has blocks with vari-
ous computing architectures and principles of the or-
ganization of the execution process, requiring an indi-
vidual technological approach at the level of a single
computing platform. Executin of HWF may require
usage of heterogeneous computing resources (cloud
computing, local clusters, supercomputers) that forms
global computing environment. As part of the HWF
processing, it is required to organize both the execu-
tion process for each mode and the data transfer pro-
cess between them. Thus, a single mechanism for
managing the performance of the HWF is needed,
which is able to analyze the components of the HWF
components and interact with all participating plat-
forms and technologies.
For efficient organization of computing process it
is necessary to optimize execution process of HWFs.
It can be optimized by scheduling technologies and
algorithms. Effective scheduling allows you to re-
duce the amount of transferred data, arrange comput-
ing packages on resources meeting the requirements,
thereby reducing the execution time of a distributed
application or save money in a case of cloud comput-
ing. The workflow scheduling is a well-known opti-
mization problem. However, in a case of HWF, we
are faced with uncertainties due to the interaction be-
tween computing modes and heterogeneity of the en-
vironment.
Scheduling of HWF arises new architectural prob-
lem in distributed computing environments. It re-
quires complex approach for efficient organization of
computation. In this work we presented our devel-
oped hybrid intellectual scheme for organization and
optimization of HWF execution. The scheme orga-
nizes interaction between computing modes and pro-
vides scheduling algorithms for optimization of HWF
execution. The scheduling algorithms are provided
for batch, stream and iterative modes and are pre-
viously demonstrated in our researches (Melnik and
Nasonov, 2019)(Melnik et al., 2018)(Melnik et al.,
2019). Therefore we combined our developed meth-
ods under single technology. In a batch case, we de-
veloped a scheduling algorithm that based on princi-
ples of reinforcement learning (RL) and neural net-
works (NN) which allows dynamic scheduling at the
level of structure analysis of the computing load and
infrastructure and dynamically improve the proposed
solution. For optimizing the performance of stream-
ing data processing we developed a evolutionary al-
gorithm (EA), providing flexibility and scalability of
calculations by assessing the need for computing re-
sources. For iterative mode we also developed evo-
lutionary algorithm which allows using the logic of
computational applications to significantly reduce the
execution time and balancing computing resources.
For experimental study we used a developed sce-
nario of a problem for generation of plans for snow
cleaning in a city based on data from social media.
We constructed a HWF that aimed to solve the prob-
lem. The HWF is composed by software packages
in batch, stream and iterative modes. We evaluated
the performance of our developed hybrid scheduling
scheme with a scheme based on existing perspective
algorithms.
2 RELATED WORKS
Each computing mode uses specific technologies to
organize data processing that have their own inter-
faces for data, software modules, and mechanisms
for interacting with resources. Thus, the optimization
of HWF includes the optimization of execution of all
three modes. To do this, it is necessary to study the
technologies and methods for optimizing the schedul-
ing for each mode.
Batch. There are many various Scheduling algo-
rithms for Batch data processing in different comput-
ing systems (supercomputers, cloud computing, grid-
systems etc). The scheduling can be performed in
static and dynamic cases. Static scheduling is char-
acterized by building a schedule before execution of
CA. Dynamic scheduling is happened, when schedule
is built up on the fly, while CA execution happened.
In general cases, Scheduling problem is NP-
complete. Because of it there is two classes of algo-
rithms, which can solve this problem non-optimally
in general: heuristic and meta-heuristic algorithms.
Heuristic algorithms are greedy; based on ranked
listings; based on a specific set of deterministic rules
by which computing tasks are distributed among in-
frastructure nodes. These rules are based on type of
a computing system and the requirements of tasks on
computing resources, which is not always possible,
because of uncertainty of global computing systems.
Heuristic algorithms in most cases are depended on
specific type of computing load. The main advan-
tage of heuristic algorithms is the speed of obtain-
ing schedules, what is important for dynamic schedul-
ing. The most usable and famous scheduling heuris-
tic algorithms are CPOP (Critical Path on a Pro-
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
201

cessor), HEFT (Heterogeneous Earliest Finish Time)
(Topcuoglu H., 2012), HCPT (Heterogeneous Critical
Parent Trees) (Hagras and J., 2003) .
Meta-heuristic algorithms imply the implementa-
tion of evolutionary and swarm approaches. Such al-
gorithms include: Genetic Algorithm (Nagar et al.,
2018), Gravitational Search Algorithm (Choudhary
et al., 2018), Simulated Annealing or Particle Swarm
Optimization (Masdari et al., 2017) etc. Schemes of
evolutionary and swarm algorithms can be developed
directly for the Scheduling problem. Since meta-
heuristic algorithms require significantly more time
to obtain a solution, hybrid schemes are often built
to make up this drawback by integrating heuristic al-
gorithms at the initialization stage of meta-heuristic
algorithms.The main advantages of meta-heuristic al-
gorithms are better quality of resulting schedules and
much wider range of applicability, but meta-heuristic
algorithms require more time to search for quality so-
lutions.
Despite the fact that hybrid schemes provide ac-
cess to the positive qualities of heuristic and meta-
heuristic algorithms, it is necessary to quickly and
efficiently solve problems based on a wide range of
calculations using a computing system, including the
wide heterogeneity of computational models and re-
sources. Promising for solving the scheduling prob-
lem are machine learning methods, in particular, re-
inforcement learning, because these methods can as-
similate system monitoring data, predict the density
of the computational load, and also be able to tune
performance models for the most accurate assessment
of the characteristics and indicators of data, computa-
tional models, resources and the quality of the result-
ing solutions in general.
There is a number of papers ((Hussain A.,
2016), (Ismayilov G., 2020), (Vukmirovi
ˇ
c S., 2012),
(Xiao Z., 2017)) devoted to the use of machine learn-
ing approaches for solving secondary tasks, such as
refining the assessment of individual tasks according
to historical data, predicting changes in workload, re-
fining the assessment of time of new task arriving.
But also there are papers, where machine learning
approach is used for solving Scheduling problem di-
rectly (Yao J., 2006) using Reinforcement Learning
(RL) method. In this paper RL is used for specific
Scheduling problem - Scheduling in Grid-systems.
In work (Rashmi S., 2017) RL approach is used for
scheduling tasks in MapReduce. Authors of the most
promising algorithm DQTS in paper (Tong Z., 2019)
consider more general formulation of the problem
and use one of the RL techniques - Deep Q-learning
method to get results with higher metrics (makespan
and nodes load), than baseline (MAXMIN, MIN-
MIN, FCFS algorithms) solution. But most of the pa-
pers use only basic information about computing sys-
tem (number of tasks and quantity of resources) and
these problem leads to less flexible scheduling sys-
tem. But compared with heuristic and meta-heuristic
algorithms, their advantages include: the ability to
use the accumulated experience of running various
WF, including changing conditions based on launch
statistics; the ability to learn patterns in WF struc-
tures, resources and their combination to provide a
much faster search for solutions than meta-heuristic
algorithms and better than heuristics; the ability to au-
tomatically adapt to changing conditions, the nature
of the load and its modes of receipt, developing new
scheduling strategies, which is difficult or even im-
possible for heuristics and meta-heuristics methods.
Stream. Compared to batch processing, stream pro-
cessing is characterized by the continuous flow of new
data that require immediate processing. This creates
the need for the simultaneous operation of all appli-
cation operators. Due to continuity, the final amount
of data to process cannot be determined. However,
you can predict the density of the incoming comput-
ing load, and the resulting system load estimates can
be taken into account when planning a streaming ap-
plication. High-quality forecasting plays an impor-
tant role, because of this, it becomes possible to ade-
quately respond to changes by scaling (up and down)
computing resources and achieve elasticity of calcu-
lations (the minimum difference between the need for
resources and the amount of allocated resources).
Optimal configuration of the platform and appli-
cation can increase data throughput, reduce latency
and power consumption. Choosing the optimal num-
ber of nodes, the correct platform parameters, and the
optimal distribution of application operators among
computing nodes can ensure maximum system per-
formance. Effective planning of streaming data pro-
cessing can lead to increased productivity, resource
utilization or reliability of the system as a whole,
depending on the requirements of both users and
providers.
For Stream data processing is widely used plat-
forms such as Apache Storm, Spark Streaming, Flink,
S4. However, the most part of algorithms are aimed
for Storm (Peng B., 2015)(Agarwalla B., 2006)(Xu J.,
2014).
Based on the analysis of the methods of schedul-
ing streaming computing, it was revealed that at
present this direction is at the development stage.
The existing methods use explicitly available infor-
mation and are not able to fully take into account
the dynamics of changes and the incompleteness of
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
202

information about the incoming load into the sys-
tem. Moreover, the solutions considered mainly used
the Apache Storm platform for developing algorithms
and conducting experiments. This necessitates the
development of a generalized approach applicable to
other alternative technologies (for example, Apache
Flink or Spark Streaming).
Iterative. Applications running on a supercomputer
are often presented as a composition of computational
models of different scales (spatial or temporal) in
terms of the subject area. These kinds of applications
are called multiscale modeling applications. Separate
levels (scales) can take the most significant part of all
calculations (for example, the smallest scales). The
modeling process is often iterative. In this case, the
calculations are parallelized across nodes of the su-
percomputer and global synchronization is required
at each iteration. Applications for multiscale model-
ing with an iterative nature of computing represent an
iterative computing mode that has its own specifics
in organizing and optimizing the execution process.
Parallelization involves dividing the calculation area
of a model into partitions, while the intensity of cal-
culations between partitions can not only vary signifi-
cantly, but also have dynamics, which greatly compli-
cates the organization of calculations with effective
scheduling.
The paper (Borgdorff J., 2014) provides a detailed
analysis of the types of multiscale applications, as
well as possible ways to organize their execution in a
distributed environment. The authors identified three
types of applications - connected, scalable and prior-
itized. For each type, application examples were se-
lected and manual optimization was carried out. Ex-
perimental results shows that information about type
of application significant speed up their execution.
In (Subedi P., 2019) is proposed the Stacker
framework for efficiently moving data from multi-
scale CAs running in supercomputer environments. In
particular, the work is aimed at optimizing the work
with random access memory during the execution of
distributed applications at various stages. But there is
not ability to consider deadlines. The consideration
of deadlines is a determining criterion when work-
ing with emergency computing systems, since in such
systems the result often needs to be obtained by any
possibility for a certain time.
In (Pollard S.D., 2019), the ways of efficient
organization of parallel computing on the basis of
partitioning the modeling domain and their purpose
into various processor architectures are investigated.
However, this article does not examine the internal
characteristics of the selected areas and their balanc-
ing.
Conclusion. Despite the presence of work related
to the scheduling of the HWF, a complete algorithm
has not been developed that can solve the schedul-
ing problem in the face of uncertainty at the level of
distribution of tasks by resources, taking into account
the specific structure of both the tasks and the re-
sources themselves. Therefore, the application of ma-
chine learning methods to solve the task of scheduling
HWFs, which partly allow for taking into account the
uncertainty directly during the execution of the appli-
cation itself, is an urgent direction at this stage in the
development of the scientific field of optimizing the
planning of distributed applications.
Also, there is no generalized algorithms for solv-
ing the problem of scheduling for distributed stream
data processing applications, and therefore there is
a need to develop computational optimization algo-
rithms for different platforms and for the stream op-
timization problem in general. The development of
methods for organizing the execution of iterative dis-
tributed applications is relevant, especially for solving
scientific problems in supercomputer environments.
3 PROBLEM STATEMENT
Scheduling of HWF based on the implementation of
the interaction between the modes is presented. For
computational modes, individual approaches were ap-
plied that considered the specifics of each of the
modes. All methods are based on the classical state-
ment of the scheduling problem — the distribution of
computational tasks over resources of a computer sys-
tem. As a result, the scheduling of HWF is a com-
bined scheduling problem, which consist of batch,
stream and iterative scheduling problems with their
specifics.
3.1 Batch
In the case of the batch mode, the task of workflow
scheduling in the classical form is solved. For the
statement of the scheduling problem, the following
are introduced: a computational load model; comput-
ing environment model; optimization criteria and per-
formance models for evaluating criteria.
For the statement of the scheduling problem, the
following entities are introduced: a computational
load model; computing environment model; opti-
mization criteria and performance models for evalu-
ating criteria. The computational load is presented in
the form of a directed acyclic graph (DAG) W f =<
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
203

V, E >, where V = {v
i
} – tasks, a E = {e
i,i
0
} – data
edges. Each task represents a computational model
or application to be executed. Set of computation re-
sources is R = {r
l
}. Schedule is an ordered distribution
of tasks by resources in the form S = {(v
i
, r
l
}). Taking
into account all the criteria C = {c
q
(S )}, we can for-
mulate a definition of the problem. The main goal is
to find such an optimal schedule S
opt
, that:
f (S ) =
P
(c
q
∈C)
ω
q
c
q
(S ),
f (S ) → min
S ∈S
f (S ),
where ω
q
– weights that determine the degree of
importance of each criterion and normalize them and
S is a set of all possible schedules. Criteria for opti-
mization include: runtime; cost of resources; reliabil-
ity of execution. The execution time of v
i
on a particu-
lar node r
l
is ET (v
i
, r
l
) and data transfer T T (e
i,i
0
, b
i,i
0
)
are estimated using performance models that can be
constructed by analytical or statistical methods.
3.2 Stream
Scheduling for streaming data processing has several
differences from scheduling in batch mode. Despite
the fact that a streaming application can also have a
graph structure of software components that perform
various procedures on incoming data, the data ar-
rives continuously and with dynamic intensity. More-
over, in the case of batch mode, the adjacent tasks of
the computational graph are performed sequentially,
while in the streaming case, all tasks of the computa-
tional graph must operate simultaneously and contin-
uously.
An application for streaming data processing is a
computational graph, where the vertices are computa-
tional operators, and the edges represent the transfer
of data between operators. Such a graph is an ab-
stract structure, operators are logical units. For direct
data processing and scaling, a certain number of in-
stances of operators (tasks) are created. Data flows
continuously in the form of tuples through instances
of the application graph operators. A tuple is a logi-
cally complete unit of data, i.e. can be atomically pro-
cessed by the operator. Tuples can be different both in
volume and in type.
The computing environment contains a set of
nodes (hosts) H = {v}. Every node v - set of com-
puting characteristics or resources allocated for com-
puting tasks: v = (cpu
v
, ram
v
, gpu
v
, ...). Based on the
resources of a node, its performance is determined in
flops (float operations per second). It is assumed that
tasks hosted on the same host share their resources
by a fraction of their workload density. The proposed
model is based on the use of cloud resources, where
computing environment H can be changed during the
planning process.
The computational load consists of many compos-
ite streaming applications, each of which has a set of
operators. Thus, the computational load: W = (O, E)
is a graph, where graph nodes are operators O = {O
i
}
streaming applications with dependencies set between
E = {e
i, j
}. The edge e
i, j
means a logical relationship
between parent operator O
i
and child operator O
j
.
Parent operator can be determined as par(O
i
) = (O
j
∈
O∀e
j,i
∈ E). Similarly, the set of child operators is de-
termined by the function child(O
i
) = O
j
∈ O∀e
i, j
∈ E.
The following performance model functions are de-
fined for each operator O
i
: RR
i
(s) - a function that
estimates the amount of resources r for the complete
processing of input tuples s per unit time; IP
i,k
(s, r)
- the number of incoming tuples of data received by
the operator from the parent’s operator O
k
∈ par(O
i
),
which will be processed depending on the total num-
ber of input tuples s and the set of resources assigned
to the operator; OP
i, j
(n) - the number of outgoing tu-
ples received by the descendant operator depending
on the number of processed tuples.
Schedule S = (W
0
, H
0
, A) consist of a computa-
tional load configuration, configurations of the com-
puting environment and distribution of operators in-
stances among nodes. A Schedule A = [(o
j
, v
c
)]
|o|
j=1
is
a set of pairs task o
j
and computing node. G = g
i
(s)
is a set of optimization criteria, which should be max-
imized. C = c
i
(s) - various boundaries, which should
be performed during the optimization and schedule
construction. A Schedule problem for stream data
processing can be presented as:
P
|G|
i
α
i
g
i
(S
opt
) +
P
|C|
i
β
i
c
i
(S
opt
) ≥
P
|G|
i
α
i
g
i
(S
0
) +
P
|C|
i
β
i
c
i
(S
0
),
where α and β are used to determine the signifi-
cance of a particular criterion or restriction.
3.3 Iterative
Distributed iterative applications consist of many in-
stances of a computing package, each of which starts
with its own set of parameters. Between instances
of the computing package, interaction is performed
at each iteration of the application through data ex-
change. To optimize the scheduling of iterative dis-
tributed applications, a graph performance model has
been developed. The main idea of this model is based
on the developed graph model for computing load al-
location. The graphical allocation model is based on
the graph of the internal structure of the application
(consisting of blocks and the links between them) and
the placement (destination) across containers and re-
sources. Let W = {w
g
} be the computational load for
the current iteration for each block of application g. h
l
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
204

is a performance of resource r
l
. The model, describ-
ing the specific location, is used to: analyze and pre-
dict the performance of a distributed application; allo-
cation changes by moving blocks between resources
and containers. A cost function has been defined for
moving from schedule S
1
to S
2
:
f
(
S
1
, S
2
)
=
P
d
g1,g2
b
l,l0
δ
l0
l
where: δ
l0
l
is data volume to be transmitted from
v
g1
to v
g2
, b
l,l
0
denotes the data transfer speed. Func-
tion for estimating simulation time on one iteration:
T
(
S
)
= max
l
P
j
w
j, j0
h
l
+
P
j
P
j
0
d
j, j
0
b
l,l
0
δ
l0
l
Then the condition for the transition between
schedules is determined:
f
S
prev
, S
new
<
T
S
prev
− T
(
S
new
)
θ,
where θ is a statistically dependent value repre-
senting the rate of change of the computational load
among the vertices of the computational grid.
4 METHODOLOGY
4.1 Batch NNS Algorithm
Developed scheduling algorithm Neural Network
Scheduler (NNS) is based on Reinforcement Learn-
ing technique - Q-learning. Q-learning is a model-
free RL technique, that learns a policy telling an agent
what action to take under what states of environment.
The policy determines the choice of action a from ac-
tions set A. Action at moment t is chose based on
Q-function Q(s, a), which is represented all reward
from at this moment to the end of an episode, us-
ing rule a
i
= argmax
a
(Q
t
(s, a)). Then agent do cho-
sen action in the environment and gets new state of
the system s
t+1
and reward r(s
t
, a). During the pro-
cess the agent accumulates data in the form of the
established s
0
a
0
r
0
s
1
a
1
r
1
s
2
.... Q-function is updated
in accordance with the SARSA principle: Q(s
t
, a
t
) =
Q(s
t
, a
t
) + α[r
t
+ γQ(s
t+1
, a
t+1
) − Q(s
t
, a
t
)], where α -
learning rate, γ - discount coefficient.
Reinforcement learning allows you to move from
classic machine learning with establishing the depen-
dencies of the output data from the input to building
a controller that establishes the relationship between
system states and actions responding to states. Con-
troller training is carried out due to interaction with
the external environment (computing infrastructure)
and already gained experience or historical system
monitoring data.
The NNS algorithm is proposed in (Melnik and
Nasonov, 2019). The NNS algorithm is an agent that
is designed to effectively plan tasks for computing
nodes. The main part of the agent is a neural net-
work, which allow to evaluate and select the currently
most beneficial task assignment to a resource (action).
The network architecture is presented in such a way
that it takes up to m tasks and n computing resources.
The selected tasks and resources are encoded in vec-
tor parameters - the input state, taking into account the
state of the computing environment, the structure of
the workflow and the current schedule. The vector of
parameters consists of several categories: general pa-
rameters of the workflow; task parameters; resource
settings; parameters for the tasks set on the resources.
This architecture of the scheduler allows you to per-
form dynamic planning without reference to the di-
mension of the problem (the number of tasks HWF).
The main operating objects of the NNS algorithm are
presented in Fig. 1.
Figure 1: NNS scheduling algorithm scheme based on rein-
forcement learning.
The agent interacts with the computing environ-
ment, receiving from it the current state, which col-
lects information about the load on computing re-
sources, workload, current schedule, and performance
models to evaluate task performance.
Since HWFs differ from each other, HWFs of the
same structure may differ in input data and scale, be-
cause of it the relative values of parameters should be
used. To go to the relative values of the parameters,
we determine the theoretically worst execution time
WT (W F). The worst execution time is estimated as
the sum of the execution time of all tasks assigned
to the weakest resource in terms of performance and
the time required to transfer all data through the net-
work, regardless of the need for these transfers. This
allows you to train a neural network based on HWF of
any dimension, but at the same time to identify HWFs
that are similar in structure and apply the experience
gained during training to plan them.
The Reward function from the environment is de-
termined as r(s, a) =
WT
CT
i
s
n
, where CT - current sched-
ule time, i
s
- number of already scheduled tasks and
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
205
n - total number of tasks in the CA. In the case of a
terminal state, the reward is equal to the ratio of the
current execution time of the CA to its worst theoret-
ical time.
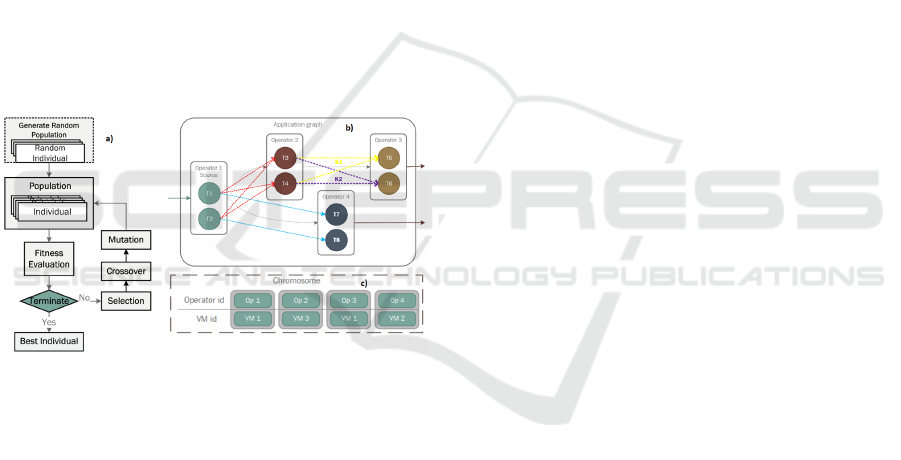
4.2 Stream SSGA Algorithm
An evolutionary algorithm for scheduling of dis-
tributed streaming applications SSGA (Stream
Scheduling Genetic Algorithm) imitates the evolu-
tionary process, the scheme of which is presented in
Fig. 2a. Fig. 2b shows an example of a graph of a
streaming application, and figure 2c shows an exam-
ple of representing a solution in the framework of the
developed SSGA algorithm. The SSGA algorithm
is growing a population of solutions that represent
schedules for placing streaming applications across
nodes of a computing environment. The fitness
function is used to assess the quality of each solution
in accordance with the specified optimization criteria
and limitations. The SSGA algorithm was proposed
in (Melnik et al., 2018).
Figure 2: Scheme of the genetic algorithm (a) for stream
data scheduling processing (b) and example of GA chromo-
some (c).
Further, a modification DSSGA was developed
to solve the problem of scheduling of streaming
data processing in cloud environments (for example,
Amazon EC2), taking into account the possibility of
launch and terminate computing nodes to ensure scal-
ability and elasticity of calculations. Fitness function
f (S ) is a set of criteria and restrictions: the cost of
nodes γ(S ); penalty for exceeding the window for de-
laying the execution of data tuples ρ
lat
(
S
)
; penalty for
invalid decisions ρ
val
(
S
)
; number of allocated kernels
for operators; the overhead of the transition to the new
schedule σ(S). Developed SSGA and DSSGA allow
efficient scheduling due to a unique approach to the
problem of stream data scheduling by predicting the
intensity of incoming data into the system, includ-
ing under conditions of uncertainty. The proposed
model of streaming data processing is applicable for
most popular platforms for distributed processing of
streams.
4.3 Iterative. IMSGA Algorithm
The iterative computing organization algorithm is
developed based on monitoring instances of a dis-
tributed iterative application IMSGA (Iterative Mul-
tiagent Scheduling Genetic Algorithm). The scheme
is based on a multi-agent approach, where each in-
telligent agent is responsible for a certain area of
computing nodes and provides its own performance
models for the iteration time for its area. The mas-
ter agent plans the placement of application instances
by agents, receiving developed performance models
from the agents themselves. During the execution of
the iterative application, the master agent performs
dynamic rescheduling to account for changes in the
dynamics of the computational load in the selected
areas of calculations. The IMSGA algorithm is pro-
posed in (Melnik et al., 2019).
The Algorithm IMGSA have four stages. The first
stage of the scheme is responsible for managing run-
ning applications. The second stage is responsible for
forming virtual environment. The third stage is a dis-
tributed two-level intelligent algorithm with a high-
level central core of resource quotas and a multi-agent
collaborative level of settlement management. The
fourth stage in the diagram is the level of a heteroge-
neous computing environment, which provides com-
puting resources for calculations. The algorithm is
aimed at the distribution of the cells of the modeling
domain by computing resources, behind which are in-
telligent agents. The simulation area is given by a grid
of size nxn, and there are m intelligent agents over
which these cells need to be distributed. An exam-
ple of a genotype and its corresponding distribution is
presented in the Fig. 3.
The mutation operator moves randomly selected
centers, adding normally distributed values. A two-
point crossover selects centers for agents from two
parents. The selection is carried out by a tournament
with three participants. Each agent has its own per-
formance model. To evaluate the fitness function, a
model is launched that estimates the application mod-
eling time using the constructed performance models.
This allows the user to predict the computational load
for subsequent iterations for each intelligent agent.
The fitness function aggregates the simulation time of
all iterations in accordance with the simulation time
for each intelligent agent.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
206
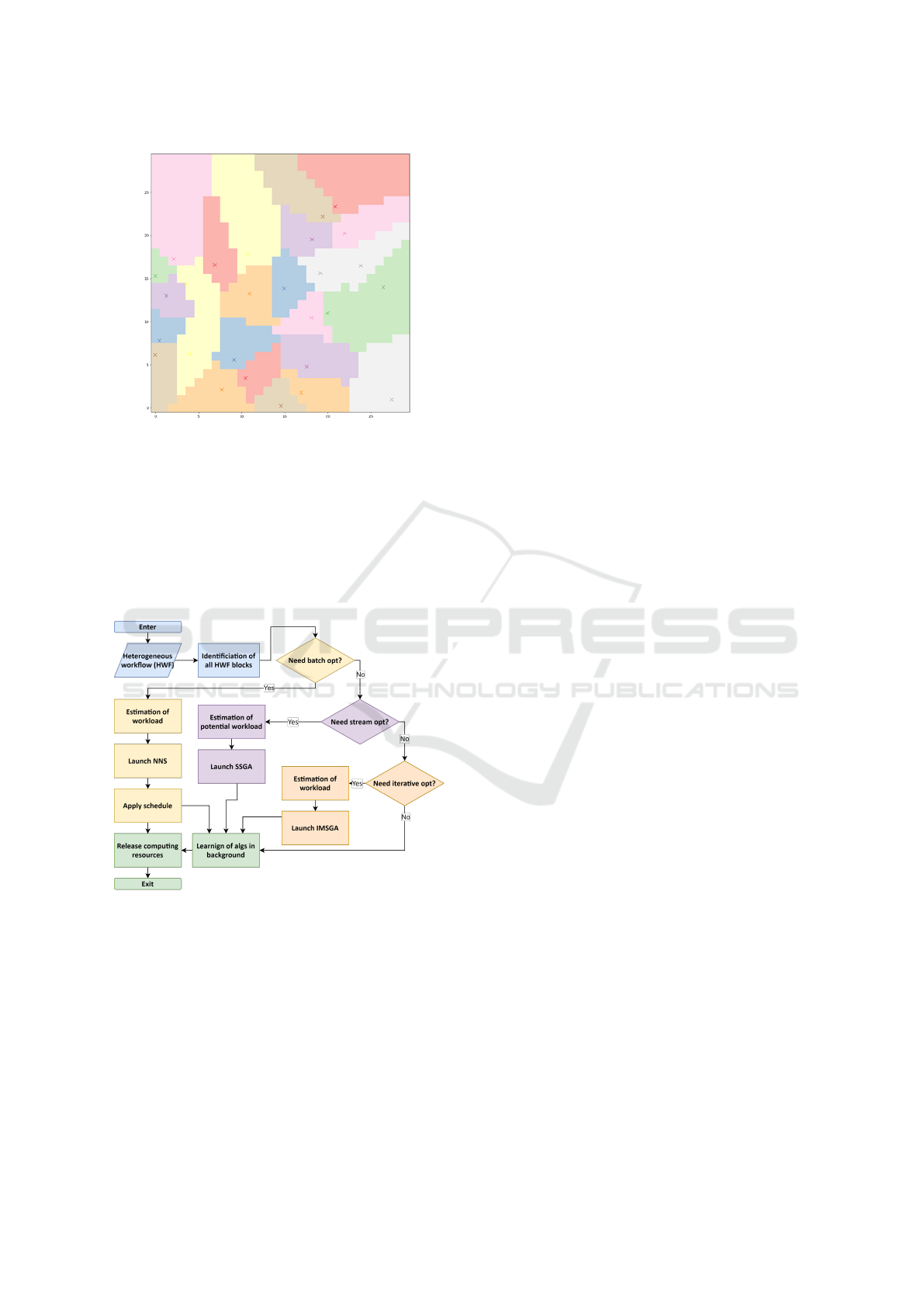
Figure 3: An example of a solution generated by a genetic
algorithm in the case of modeling population mobility.
4.4 Hybrid Scheme Development
Based on the developed methods and algorithms,
a generalized algorithm for the organization of the
NWF is constructed, which allows for the interac-
tion between computational modes. The developed
scheme is presented in Fig. 4.
Figure 4: General scheme for organizing heterogeneous
computing.
The input data is information about the received
computational load in the form of the HWF structure
with the characteristics of its constituent elements.
The first step in organizing computations is to identify
the type of application, its structure, and the struc-
ture of its blocks. Identification is based on meta-
information about the components. The first level
is batch scheduling for the entire HWF. To sched-
ule batches, basic metaheuristics and heuristics are
launched, the solutions of which are added to the so-
lution repository. The developed NNS algorithm for
scheduling batch data processing uses this repository
in the process of training a neural network and car-
ries out the placement of tasks for execution. If the
blocks of a heterogeneous composite application are
a streaming or iterative application, the planning of
these packages is carried out by SSGA and IMSGA,
respectively.During the execution of iterative blocks,
monitoring of the load and redistribution of resources
occurs if necessary. Similarly to the iterative mode,
in the process of performing streaming data process-
ing, the system is monitored and the intensity of data
streams is predicted. The developed algorithm allows
scheduling HWF by identifying the type of blocks
included in the HWF and dividing the global HWF
scheduling task into sub-tasks: batch, streaming, and
iterative scheduling.The division into subtasks allows
us to apply individual approaches for each mode and
thereby take into account the specific features of each
computational mode to build an effective schedule in
conditions of uncertainty and incompleteness of in-
formation.
5 EXPERIMENTAL STUDY
5.1 Batch NNS Algorithm
We experimentally studied the ability of the devel-
oped NNS algorithm to learn and find the relation-
ships between the proposed parameters of the vec-
tor representation of the planning problem, as well
as make high-quality schedules comparable to exist-
ing analogues. The experiments were carried out on
the basis of a simulation model and well-known test
WFs (Montage, CyberShake, Epigenomics) provided
by the workflow management system - Pegasus.
For comparison, the DQTS algorithm was im-
plemented. The algorithm was chosen as the most
promising and closest in concept (the use of reinforce-
ment learning) among existing algorithms at the time
of the study.
The results of the algorithm launches are pre-
sented in Table 1. WFs are presented in the form of
workflow type (for example, Montage) and the num-
ber of tasks in WF. The results include the total execu-
tion time of the test WF and the algorithm reward for
constructing the schedule. A reward is the ratio of the
theoretically worst time to the found execution time.
According to the results of the experiments, the de-
veloped NNS algorithm received solutions better than
DQTS by 20% on average in terms of the execution
time of test WFs.
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
207
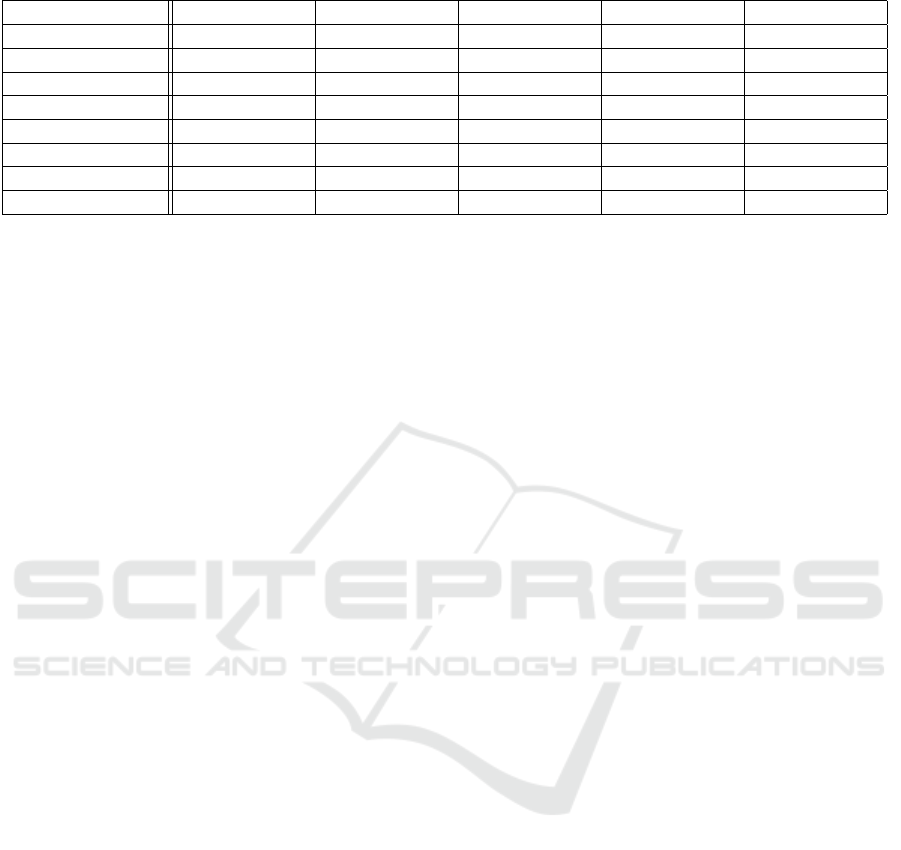
Table 1: Comparison of CA scheduling results between NNS and DQTS algorithms.
CA DQTS time, s DQTS reward NNS time, s NNS reward Improve, %
Montage50 256 2.9 206 3.8 22
Montage100 406 4.1 369 4.5 9
CyberShake50 995 2.9 807 3.6 19
CyberShake100 1550 3.4 1315 4.0 15
Inspiral50 6111 2.7 4104 4.0 33
Inspiral100 10314 2.8 7061 4.2 32
Epigenomics46 24530 2.4 19979 2.9 19
Epigenomics100 192851 2.9 170608 3.3 12
5.2 Stream SSGA Algorithm
The purpose of the experiment is to study the effec-
tiveness of the developed SSGA algorithm. The ex-
periments were based on the resources of the AWS
cloud platform and the developed simulation model
for evaluating the quality of solutions. A compari-
son was made of the results of the developed SSGA
with the RStorm algorithm. The result of the experi-
ments is presented in Figure 7 for the schedules built
by RStorm and SSGA. Only four nodes were used in
the SSGA schedule instead of the five nodes used in
the RStorm schedule. Due to the optimal combination
of peak and non-peak intervals of the intensities of the
input data streams, the algorithm allows you to save
nodes and improve resource utilization.
The developed SSGA is able to find solutions with
fewer resources used (1.6 times better) and with a
greater resource efficiency of 6.2% on average among
experiments, even with a large measurement of the
optimization problem (200 threads, 100 nodes). The
results are described broader in the paper (Melnik
et al., 2018).
5.3 Iterative IMSGA Algorithm
For the experiment, a scenario was developed for the
movement of agents in such a way as to create an ex-
plicit dynamics of the computational load on different
parts of the computational domain of the application.
The aim of the experiment was to study the ability of
the IMSGA algorithm to dynamically adapt the itera-
tive application execution schedule in the process of
changing the load. The experiments are described in
the paper (Melnik et al., 2019).
The experimental results show that when using a
uniform load allocation schedule, the default simula-
tion time is 308 s. Schedules generated by the ex-
pert reduce execution time by only 9 seconds. When
the developed execution scheme and the developed
IMSGA were applied, without predicting the compu-
tational load, the average simulation time was 173 s
and 158 s for cases with 5 and 10 dynamic schedules,
respectively. The best results were obtained when
predicting the density of the computational load for
each intelligent agent. Experiments show that the al-
gorithm is able to adapt to changes in the application.
The best result is 137 s (10 times with forecasting)
55% faster in compare with default uniform schedule.
In the case of predict10, the load between the com-
puting nodes was distributed as evenly as possible.
5.4 Heterogeneous Workflow
Scheduling
Scenario of Heterogeneous Workflow for Snow
Cleaning Plans Generation in a City based on Data
from Social Media. For experimental studies of op-
timizing the performance of HWFs, a scenario has
been developed to build a snow removal plan through
multi-agent modeling using social media data analy-
sis. The essence of the project is the development of a
multifunctional city platform for the analysis of vari-
ous public and communal problems of the city based
on data from specialized city resources and social me-
dia data. In particular, one of the problems is the de-
velopment of an optimal plan for snow removal and
its delivery to stationary snow melting and snow re-
ceiving points (with more than 100 main contractors
and a total budget of around two billion rubles).The
structure of application is presented in Fig. 5. The
subtask of this project was the task of optimizing
the performance of computing processes. Within the
framework of the project, a prototype NKP was devel-
oped, which organizes all stages of data processing.
In particular, the HWF includes:
• collection and preprocessing of data from social
media (streaming mode, Amazon platform cloud
resources);
• filtering and classification of the collected data to
build a scenario for an iterative unit for modeling
population mobility (batch mode, ITMO Univer-
sity resources);
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
208
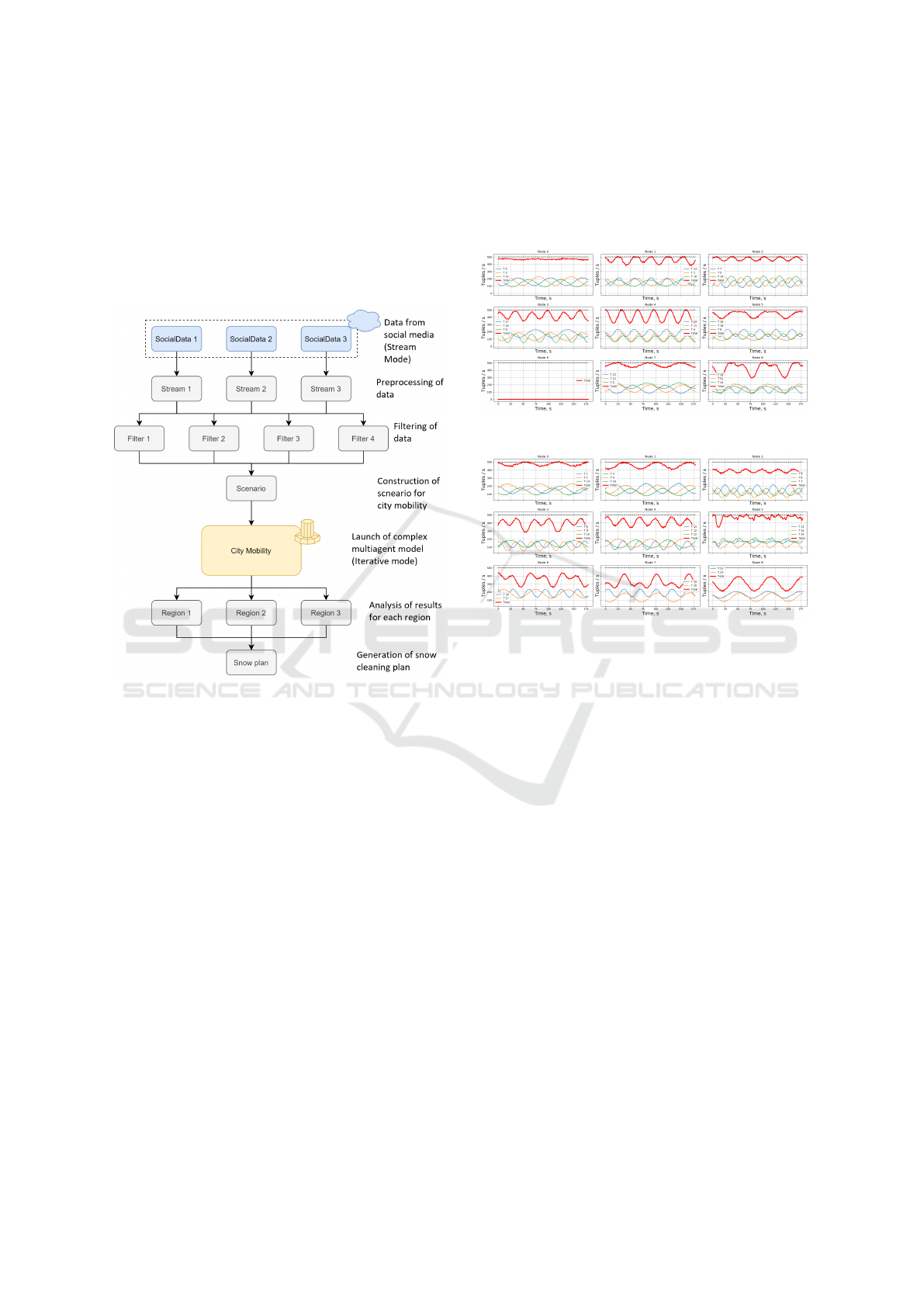
• launch of an application for modeling population
mobility in an iterative mode (iterative mode, re-
sources of the Lomonosov supercomputer);
• analysis of the results of the iterative block for
the construction of routing plans for snow removal
vehicles for different areas of the city and aggre-
gation of results (batch mode, ITMO University
resources).
Figure 5: Scheme of a heterogeneous workflow for genera-
tion a snow cleaning plan based on data from social media.
Results. During the experiments, heterogeneous re-
sources were used (supercomputer, cloud computing,
clusters of ITMO University) and interaction between
them was organized on the basis of the developed
software infrastructure for planning HWF.
To conduct experimental studies on optimizing
of a heterogeneous composite application, a scenario
was developed for estimate a snow removal schedule
based on an analysis of data from social media. As
an experiment, two execution scenarios were com-
pared. The first scenario (DEV) is based on developed
methods: NNS, SSGA, IMSGA. The second scenario
(ALT) uses the alternative algorithms : DQTS, R-
Storm.
The first step of experimental scenario was op-
timization of streaming applications, which are pro-
cessing data from social media. The comparison be-
tween SSGA and R-Storm result schedules are pre-
sented in Fig. 6 and Fig. 7. Algorithms scheduled a
streaming workload acrossavailable cloud resources.
The final load on resources at time points is repre-
sented by a red bold curve in the subplots. When the
total load exceeds the available node load (500 tuples
/ s), a queue of tuples is accumulated, which will be
processed at moments of lower resource load inten-
sity.
Figure 6: SSGA result schedule for stream mode.
Figure 7: R-Storm result schedule for stream mode.
The second stage of the experiments is the plan-
ning of all blocks of HWF in batch mode, except for
the block with iterative mode (City Mobility). The
results of batch scheduling are presented in Fig. 8
for the DQTS (a) and NNS (b) algorithms. Tasks
HWF’s batch part were allocated across 4 computing
resources with different capacity (R1 - worst node, R2
and R3 - medium, and R4 is the most performance
node).
The last stage of optimization was planning of it-
erative block. IMSGA was compared with the basic
application execution mode. The input for the block
is a scenario of the movement of people in the city
based on pre-processed and filtered data obtained by
collecting social media data.
Based on the results of scheduling of the HWF
including blocks in streaming, iterative and batch
modes, Table 2 which presents the results of a com-
parison of two scenarios of the experiment is com-
piled. As a result of comparing two scenarios of HWF
optimizing, the scenario (DEV) allows us to obtain a
schedule with 12% less cost of cloud resources, and
with the 32% less total execution time of the HWF in
compare to the scenario based on alternative methods
and algorithms (ALT).
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
209

Table 2: Comparison of scheduling results of HWF for snow removal plan.
Experiment Streaming mode Iterative mode Batch mode Result
Resources cost, CPU Avg. util., % Exec. time, s Exec. time, s Total time, s
DEV 1,53 0,004 253 227 480
ALT 1,73 0,106 402 301 703
Improvement, % 12 96 37 25 32
Figure 8: Result schedules of HWF performed by DQTS (a)
and NNS (b).
6 CONCLUSION
In this work we formed a conception of heteroge-
neous workflows that are composed of computing
modes: batch, stream, iterative. Each mode has its
own specifics for execution in distributed computing
environments. Further, we proposed a hybrid schedul-
ing scheme that allows us to organize such a com-
plex computation that compose execution of work-
flows, streaming applications and iterative multiscale
models. The hybrid scheduling scheme include op-
timization algorithms for each of computing node.
Scheduling algorithms based on reinforcement learn-
ing (batch NNS algorithm), and genetic algorithms
for stream and iterative modes (SSGA and IMSGA
respectively).
In the course of experimental studies of the de-
veloped families of algorithms, it was established that
NNS, based on reinforcement learning, is able to learn
how to solve the planning problem and build sched-
ules with an average performance increase of 20%
among the used WFs, compared to the similar DQTS
algorithm. The developed SSGA streaming data pro-
cessing scheduling algorithm is able to use 1.6 times
fewer compute nodes to fully process data streams
compared to the most famous RStorm algorithm. Due
to the developed algorithm for optimizing iterative
distributed applications, it was possible to reduce the
execution time of the application for population mo-
bility by 55%. The results of the HWF scheduling ex-
periment based on the developed approaches (NNS,
SSGA, IMSGA) allowed us to reduce the HWF ex-
ecution time by 32% compared to alternative meth-
ods (R-Storm, DQTS) and reduce the cost of cloud
resources for organizing data streaming by 12%.
ACKNOWLEDGEMENTS
This research is financially supported by The Russian
Science Foundation, Agreement #17-71-30029 with
co-financing of Bank Saint-Petersburg.
REFERENCES
Agarwalla B., e. a. (2006). Streamline: a scheduling heuris-
tic for streaming applications on the grid. In Multime-
dia Computing and Networking.
Borgdorff J., e. a. (2014). Performance of distributed mul-
tiscale simulations. In Philosophical Transactions of
the Royal Society A: Mathematical, Physical and En-
gineering Sciences., page 372.
Choudhary, A., Gupta, I., Singh, V., and Jana, P. K. (2018).
A gsa based hybrid algorithm for bi-objective work-
flow scheduling in cloud computing. Future Genera-
tion Computer Systems, 83:14–26.
Hagras, T. and J., J. (2003). A simple scheduling heuristic
for heterogeneous computing environments. In Pro-
ceedings of the Second international conference on
Parallel and distributed computing., page 104–110.
Hussain A., e. a. (2016). A survey on ann based
task scheduling strategies in heterogeneous distributed
computing systems. In Nepal Journal of Science and
Technology., pages 69–78.
Ismayilov G., T. H. (2020). Neural network based multi-
objective evolutionary algorithm for dynamic work-
flow scheduling in cloud computing. In Future Gen-
eration Computer Systems., pages 307–322.
Masdari, M., Salehi, F., Jalali, M., and Bidaki, M. (2017).
A survey of pso-based scheduling algorithms in cloud
computing. Journal of Network and Systems Manage-
ment, 25(1):122–158.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
210

Melnik, M. and Nasonov, D. (2019). Workflow schedul-
ing using neural networks and reinforcement learning.
Procedia Computer Science, 156:29–36.
Melnik, M., Nasonov, D. A., and Butakov, N. (2018).
Scheduling of streaming data processing with over-
load of resources using genetic algorithm. In IJCCI,
pages 232–241.
Melnik, M., Nasonov, D. A., and Liniov, A. (2019). In-
tellectual execution scheme of iterative computational
models based on symbiotic interaction with applica-
tion for urban mobility modelling. In IJCCI, pages
245–251.
Nagar, R., Gupta, D. K., and Singh, R. M. (2018). Time ef-
fective workflow scheduling using genetic algorithm
in cloud computing. International Journal of Informa-
tion Technology and Computer Science, 10(1):68–75.
Peng B., e. a. (2015). R-storm: Resource-aware schedul-
ing in storm. In Middleware 2015 - Proceedings of
the 16th Annual Middleware Conference., pages 149–
161.
Pollard S.D., e. a. (2019). Evaluation of an interference-
free node allocation policy on fat-tree clusters. In Pro-
ceedings - International Conference for High Perfor-
mance Computing, Networking, Storage, and Analy-
sis., pages 333–345.
Rashmi S., B. A. (2017). Q learning based workflow
scheduling in hadoop. In International Journal of Ap-
plied Engineering Research., page 3311–3317.
Subedi P., e. a. (2019). Stacker: An autonomic data move-
ment engine for extreme-scale data staging-based in-
situ workflows. In Proceedings - International Con-
ference for High Performance Computing, Network-
ing, Storage, and Analysis., pages 920–930.
Tong Z., e. a. (2019). A scheduling scheme in the cloud
computing environment using deep q-learning. In In-
formation Sciences.
Topcuoglu H., Hariri S., W. M. (2012). Performance-
effective and low-complexity task scheduling for het-
erogeneous computing. In IEEE Transactions on Par-
allel and Distributed Systems., page 260–274. IEEE
Press.
Vukmirovi
ˇ
c S., e. a. (2012). Optimal workflow schedul-
ing in critical infrastructure systems with neural net-
works. In Journal of Applied Research and Technol-
ogy., pages 114–121.
Xiao Z., e. a. (2017). Self-adaptation and mutual adapta-
tion for distributed scheduling in benevolent clouds.
In Concurrency Computation.
Xu J., e. a. (2014). T-storm: Traffic-aware online scheduling
in storm. In Proceedings - International Conference
on Distributed Computing Systems., pages 535–544.
Yao J., Tham C.K., N. K. (2006). Decentralized dynamic
workflow scheduling for grid computing using rein-
forcement learning. In IEEE International Conference
on Networks, pages 90–95.
Hybrid Intellectual Scheme for Scheduling of Heterogeneous Workflows based on Evolutionary Approach and Reinforcement Learning
211
