
Research on Path Tracking Control of Unmanned Vehicles based on
Vision
Kaixin Yang
1, a
, Yunlong Bai
1, b
, Jianguo You
1, c
, Haibo Dong
1, d
and Jinwei Guo
1, e
1
Automotive Data Center, China Automotive Technology & Research Center Co. Ltd, Tianjin 300000, China
e
guojinwei@catarc.ac.cn
Keywords: Unmanned driving; Path tracking; Visual navigation.
Abstract: With the in-depth study of unmanned vehicle technology, highly efficient, stable and low-cost trajectory
tracking control system has become the key technology for intelligent and practical unmanned vehicles. The
technical level of automobiles and their popularity are important indicators to measure the material living
standard and modernization level of a country or region. Path tracking and motion control play a very
important role in intelligent unmanned driving technology. At the same time, accurate tracking of the expected
feasible path and stable motion control are the basis for realizing intelligent unmanned driving. The task of
path tracking is to control the vehicle to drive along the planned path, and at the same time to ensure the safety
and handling stability of the vehicle. The precise control of driverless vehicle is obviously the key technology
in the research and development of automatic driving. Therefore, based on the vision navigation system, this
paper studies the target path tracking control of driverless vehicle.
1 INTRODUCTION
The technical level of automobiles and their
popularity are important indicators to measure the
material living standard and modernization level of a
country or region. With the progress of science and
technology and the rapid development of economy
and society, the living standard of human beings is
improving day by day. Cars enter the homes of
ordinary people rapidly, which greatly facilitates
people's daily travel (Zhang Jiaqi, 2017). With the
quickening pace of modern life, frequent traffic
accidents caused by rapidly increasing car ownership
and increasingly serious driving fatigue have severely
restricted people's good life (Li Wei, Tang Zheng,
Wang Hongmin, 2019). Due to the limitation of
human's own perception ability and congenital
reaction delay, the incomplete and delayed grasp of
external information is easy to lead to wrong
judgment and wrong operation. In order to improve
the safety and stability of vehicles, make efficient use
of vehicles and roads, and reduce road congestion and
environmental pollution, the slogan of Intelligent
Transportation System (ITS) arises spontaneously.
Unmanned vehicles play an important role in ITS
system. Path tracking is one of the main research
contents of driverless cars. Its content is to design a
controller to ensure the car to follow a preset
trajectory. Under a certain control architecture, the
path tracking of unmanned vehicles can accurately
track real-time road information, and can follow the
planned virtual path without real-time road
information (Li Yongdan, et.al, 2019).
In the process of modernization, the automobile
industry has developed rapidly. Electronic
technology, computer technology and control
technology have injected fresh vitality and power into
the automobile industry. Cars bring great
convenience to people's lives and improve the quality
of life. As an intelligent comprehensive body, the
automobile has made indelible contributions to the
progress of human civilization and social
development due to its unique superiority. The
unmanned vehicle is a typical four-wheeled mobile
robot, involving many interdisciplinary knowledge,
and is a product of the highly integrated and
development of contemporary computer science,
pattern recognition, and control technology (Wang
Zizheng, Cheng Li, 2016). Unmanned driving
technology mainly includes several key parts:
environment perception, path planning, path tracking
and bottom-level control. The task of path tracking is
to control the vehicle to travel along the planned path,
64
Yang, K., Bai, Y., You, J., Dong, H. and Guo, J.
Research on Path Tracking Control of Unmanned Vehicles based on Vision.
DOI: 10.5220/0010061500640069
In Proceedings of the International Symposium on Frontiers of Intelligent Transport System (FITS 2020), pages 64-69
ISBN: 978-989-758-465-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
while ensuring the safety and stable operation of the
vehicle. Sex (Lan Jing, 2019). Unmanned driving
obtains the vehicle's own position and posture and
surrounding environment information through
various modern sensors. It has a high degree of self-
adaptive and self-planning capabilities, and can
obtain accurate information about its own posture and
surrounding environment through the sensor. The
trajectory tracking control system for driverless cars
based on visual navigation is of great urgency and
necessity (Zhao Chunchang, et.al, 2019). The precise
control of driverless cars is obviously the key core
technology in the research and development of
autonomous driving. Therefore, based on the visual
navigation system, this paper has carried out related
research on the target path tracking control of
driverless cars.
2 UNMANNED VEHICLE
ARCHITECTURE
With the progress of communication technology,
microelectronics technology and the development of
intelligent construction, more and more equipment
such as household appliances, electricity meters,
industrial terminals and so on have the demand of
networking, and a large amount of data need to be
transmitted. On many occasions, wired connection
cannot meet people's needs. Wireless access makes
up for the shortage of wired connection with its
advantages of convenience, quickness and low cost.
With the development of electronics, computer and
information science and technology, the development
of communication system is also very rapid. From
wired to wireless, from voice to data, images, from
local to wide area, there are many communication
networks and communication methods used in
unmanned vehicle positioning system. The sensors of
the unmanned vehicle are mainly used to sense the
environmental information around the intelligent
unmanned vehicle and the body state information of
the intelligent unmanned vehicle (Zhang Haiming,
et.al, 2019). In addition to autonomous navigation,
unmanned vehicle positioning and navigation
systems all need the support of communication
networks to facilitate the transmission of various data
and information. The whole system is designed with
the idea of modularization, and the main functions are
divided into independent modules, thus reducing the
complexity of the system and making the functions of
each module of the system clear at a glance.
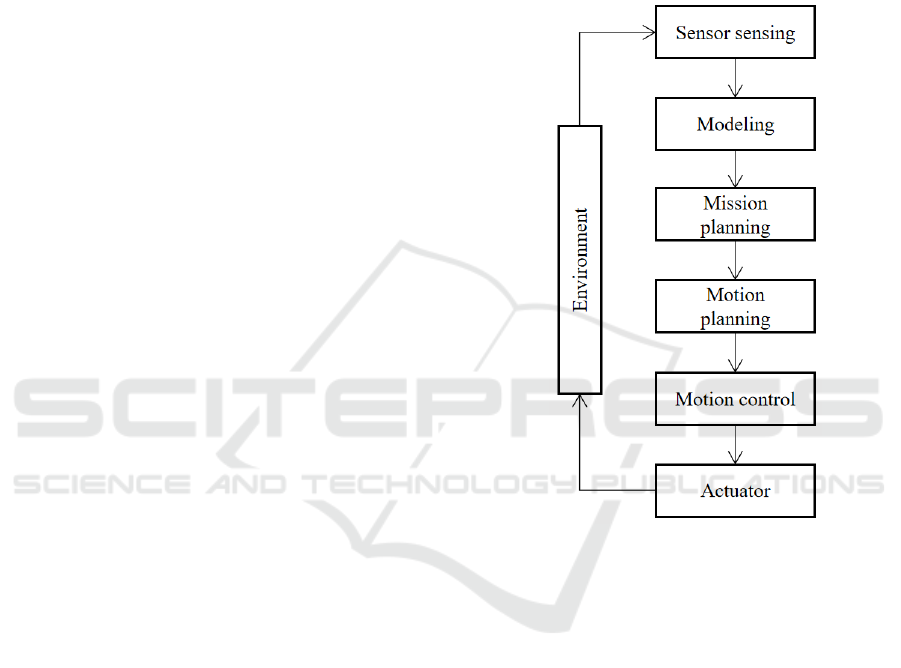
The on-board vision system of unmanned vehicles
can effectively identify lane lines, traffic signs and
traffic lights, and can also detect obstacles in driving
lanes and adjacent lanes. As shown in Figure 1, the
system architecture takes a hierarchical form. With
high cohesion and low coupling, the output of the
previous layer is the input of the following layer. By
decomposing the work from top to bottom, the
accuracy of the design system is improved.
Figure 1: Hierarchical system architecture.
The available error correction codes of the system
can be shared by all users of the system and have the
function of automatically selecting error correction
codes. It is a multi-purpose and high-performance
wireless dispatching communication system that
shares resources, costs and error correction coding
equipment and services. The actions generated by the
hierarchical system are not the direct feedback
processing results of the data collected by the sensors,
but are processed through the stages of perception,
modeling, planning and control. The effective
connection between transportation and the whole
social and economic system is realized through
information technology. The integration of
transportation information into the information flow
of the supply chain will promote transportation to
truly become an organic part of the supply chain.
Establishing a global environment is not only based
on the user's understanding of the known objects in
the environment and the analysis of their
Research on Path Tracking Control of Unmanned Vehicles based on Vision
65
relationships, but also based on the independent
construction of sensor data. The global environment
model is universal and suitable for planning many
tasks. Special short-range communication system
mainly uses special short-range communication
technology to identify relevant information of
vehicles through signal transmitting and receiving
devices of roadside units, and automatically carries
out intelligent management such as identity
identification, real-time monitoring, dynamic
guidance and the like on vehicles to complete
dynamic collection of relevant information of
vehicles. In order to carry out communication in an
orderly way and to obtain the maximum successful
communication, some mechanism is needed to
arbitrate and decide who has the right to use error
correction codes.
3 PATH TRACKING CONTROL
OF UNMANNED VEHICLES
3.1 Motion Model of Unmanned
Vehicle
The main sensor of the lane line detection module is
a vehicle-mounted monocular camera, whose main
function is to capture the real-time lane line of the
vehicle while it is running. Firstly, the area where the
lane line is located in the camera image coordinate
system is determined, then the lane line position
information is obtained by feature extraction, and
then the coordinate is transformed to the vehicle body
coordinate system. The vehicle data transmission
system, which is composed of data transmission
based on conventional communication network, has
an effect range related to the band of error correction
coding, antenna height of central station and
transmission power. Two methods of wireless
transmission are simulated by adding convolutional
codes respectively, and the number of error code
frames in the simulation is recorded. The simulation
conditions are shown in Table 1.
Table 1: Simulation conditions.
Condition category Numerical value
Bit rate 850bps
Maximum Doppler shift 9.25Hz
Speed of vehicle 50km/h
Carrier frequency 445MHz
Signal to noise ratio 20dB
Error correction coding
parameters
15
Modulation system 2FSK
Suppose the longitudinal displacement of the car
at time k is x
k
, the lateral displacement is y
k
, and the
yaw angle is j
k
. Assuming that the acceleration of the
car is constant in a short time, as shown in Figure 1,
the displacement of each point is x
k-3
, ..., x
k + 1
, the
instantaneous speed is v
k-3
, ..., v
k + 1
, then:
.
22
,
22
,
22
1111
22
1
3131
2
T
xxvv
v
T
xxvv
v
T
xxvv
v
kkkk
k
kkkk
k
kkkk
k
(1)
From v
k
-v
k-1
= v
k-1
-v
k-2
, we get:
231
22
kkkk
xxxx
(2)
If the longitudinal displacement of the vehicle at
time k-3,..., k is known, the predicted value of the
longitudinal displacement at time k+1 can be
obtained:
231
22
kkkk
xxxx
(3)
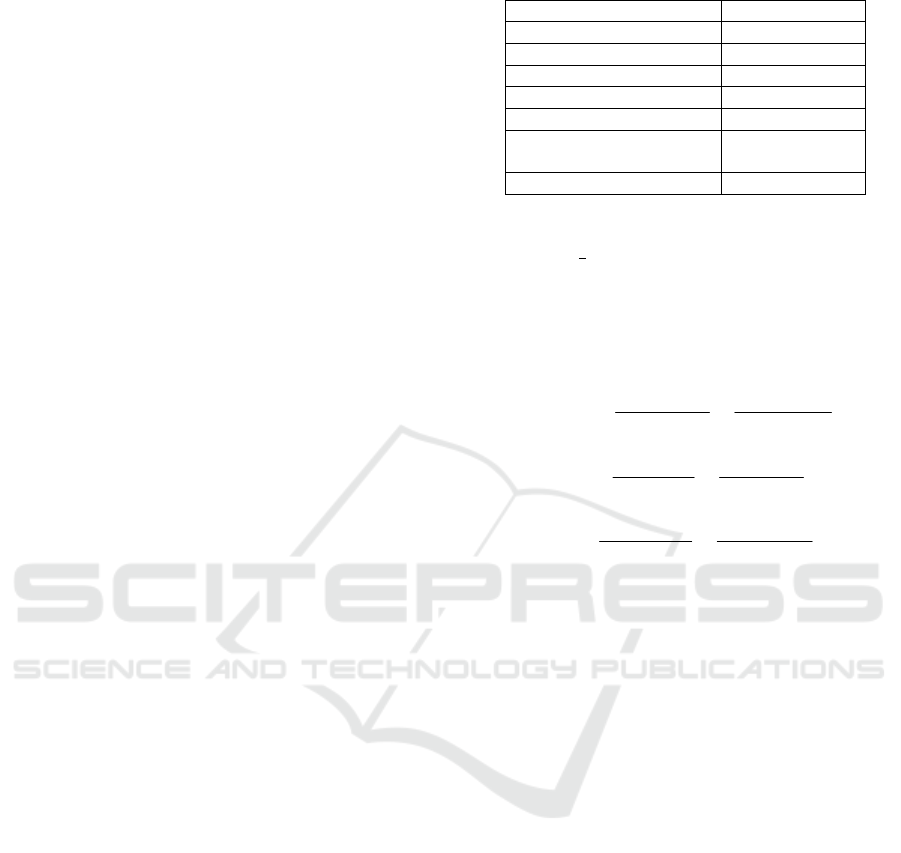
As a bearer network, ITS system itself adopts a
network structure and assigns independent addresses
such as or addresses to users. When the error
correction code is 1, the blocking rate is as shown in
Figure 2. The blocking rate when the error correction
code is 4 is shown in Figure 3.
FITS 2020 - International Symposium on Frontiers of Intelligent Transport System
66
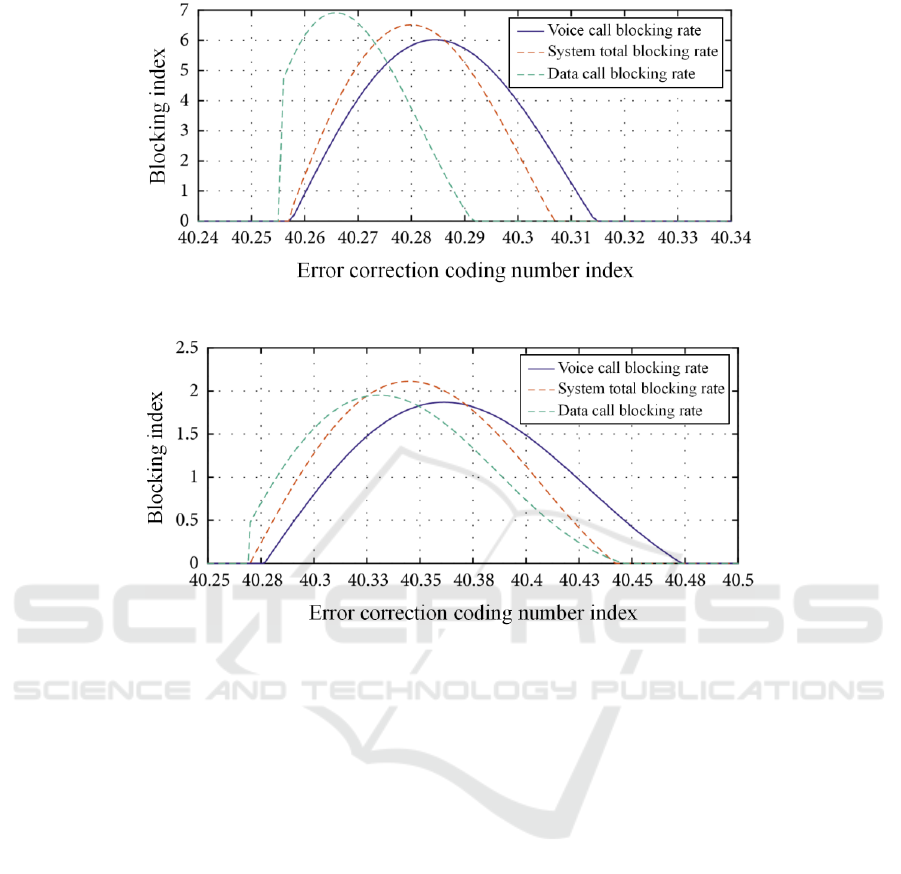
Figure 2: Blocking rate when the error correction code is 1.
Figure 3: Blocking rate when the error correction code is 4.
In the automatic driving mode, since the steering
wheel is not controlled by the driver, there is no need
to detect the steering wheel input torque (Su Fandi,
2016). However, in order to realize the closed-loop
control of the automatic steering system, the steering
angle information of the steering wheel needs to be
detected in real time as the feedback quantity. The
traditional organization form of the transportation
industry, the traditional transportation management
mode, the traditional transportation concept and the
traditional transportation technology will all undergo
changes due to the construction of the intelligent
transportation system. Considering that the external
environment of the intelligent urban traffic
information system in practical application may be in
the downtown area, all kinds of electromagnetic
interference around it are more serious, and the same
frequency interference is even more serious.
Therefore, it is particularly important to improve the
communication reliability of the whole system. The
planning layer acquires the data of the decision layer,
generates a planning path from the initial point of the
vehicle to the punctuation point, and periodically
changes and updates the path of the vehicle according
to the environmental information.
3.2 Path Tracking Controller
If an unmanned vehicle encounters an emergency
during driving, it can execute an emergency stop
command to ensure the safety of the vehicle. The
remote control receiving module on board the
unmanned vehicle receives the signal and transmits it
to the microprocessor, thus controlling each
execution module on the bottom floor to realize
emergency stop. In order to reduce the complexity of
the intelligent urban traffic information system, the
centralized control error correction coding access
method is generally selected (Fan Rongwei. Yanfang,
2016). Because the communication in the system has
the characteristics of short time and small amount of
data, it is not suitable to adopt the reservation mode,
and usually the circular and competitive modes are
selected. If the acceleration of the vehicle is too large
or there is a sudden change, the body will have a large
impact, making passengers in the vehicle
uncomfortable. The control system should limit the
Research on Path Tracking Control of Unmanned Vehicles based on Vision
67
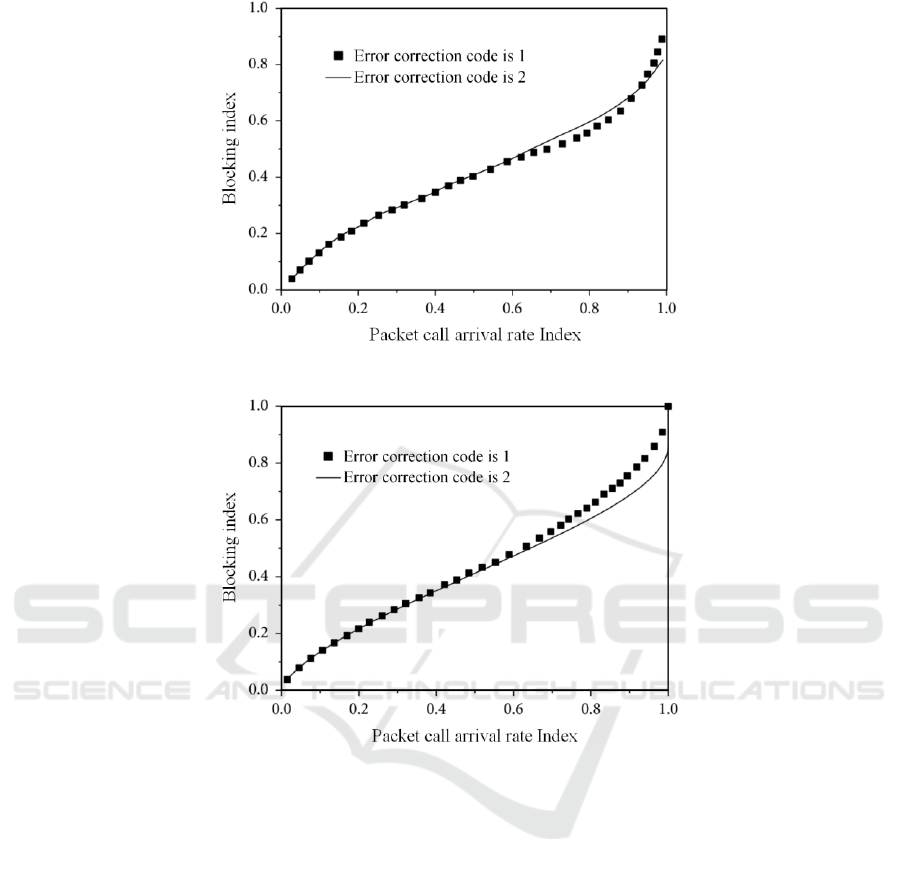
Figure 4: Packet blocking rate when voice call is 0.08.
Figure 5: Packet blocking rate when voice call is 0.12.
maximum acceleration range to make the vehicle
more stable. From the perspective of the whole
system, intelligent transportation is the embodiment
of many technologies. From the perspective of the
system as a whole, intelligent transportation is the
embodiment of many technologies. The receiving end
checks the relationship between the information
symbol and the supervised symbol according to the
established rules. Once an error occurs during
transmission, the relationship between the
information symbol and the supervised symbol is
destroyed, so that errors can be discovered and even
corrected.
Change the arrival rate of packet calls and voice
calls, and observe the blocking rate of packet calls.
Figure 4 shows the packet blocking rate when the
voice call arrival rate is 0.08. Figure 5 is the packet
blocking rate when the voice call arrival rate is 0.12.
The receiving end checks the relationship between
the information symbol and the supervision symbol
according to the established rules. Once errors occur
in the transmission process, the relationship between
the information symbol and the supervision symbol is
destroyed, thus errors can be found and even
corrected (Yu Jiawei, Luo Feng, 2016). The dynamic
model of a vehicle usually studies the mechanical
characteristics of the vehicle, such as tire mechanics,
vehicle driving mechanics, vehicle aerodynamics,
etc., and strives to establish the expression of the
relationship between the acceleration and the stress of
the vehicle, so as to find out the control rate of the
vehicle.
FITS 2020 - International Symposium on Frontiers of Intelligent Transport System
68

4 CONCLUSIONS
With the increasing annual production of
automobiles, the following major problems are traffic
congestion, energy consumption and automobile
safety. Since driverless vehicles completely exclude
the influence of human factors, they can greatly solve
the problem of traffic safety. In this paper, the vision-
based trajectory tracking control system in unmanned
driving technology is mainly studied, including
overall scheme formulation, hardware construction,
algorithm research and controller design. In the
design of electronic control system, some electric
equipments are very sensitive to low voltage due to
more electric equipments and serious power
consumption when the intelligent unmanned vehicle
runs autonomously in actual road environment.
Because the communication in the system has the
characteristics of short time and small amount of data,
it is not suitable to use the reservation mode, usually
choose the circular and competitive mode. If the
driverless vehicle encounters an emergency in the
process of driving, it can execute the emergency stop
order to ensure the safety of the vehicle. A stable and
reliable path tracking system is the necessary
condition for the industrialization of intelligent
vehicle. Subsequently, the control algorithm needs to
be transplanted to other embedded systems and fused
with multi-sensor data to realize the real-time control
of the vehicle, so as to verify the stability of the
control algorithm.
REFERENCES
Fan Rongwei. Yanfang Line fully automatic driverless
vehicle braking system [J]. Railway rolling stock, 2016
(5): 107-109.
Lan Jing. Development status and key technical analysis of
driverless cars [J]. Internal Combustion Engine and
Accessories, 2019 (15): 209-210.
Li Wei, Tang Zheng, Wang Hongmin. Research on path
tracking based on quasi-sliding mode control [J].
Journal of Chongqing Jiaotong University (Natural
Science Edition), 2019, 38 (10): 127-132.
Li Yongdan, Ma Tianli, Chen Chaobo, et al. Overview of
unmanned vehicle path planning algorithms [J].
Foreign Electronic Measurement Technology, 2019
(6): 72-79.
Su Fandi. Thoughts on fully automatic driverless cars [J].
Time Auto, 2016 (10): 49-50.
Wang Zizheng, Cheng Li. Introduction of driverless cars
[J]. Times Cars, 2016, 27 (8): 82-85.
Yu Jiawei, Luo Feng. Research on trajectory tracking
algorithm based on high-precision positioning system
[J]. Mechatronics, 2016 (10): 3-7.
Zhang Haiming, Gong Jianwei, Chen Jiansong, et al.
Unmanned vehicle car following method in
unstructured environment [J]. Journal of Beijing
Institute of Technology, 2019 (11): 1126-1132.
Zhang Jiaqi. A compound path planning algorithm based on
moving sub-goals [J]. China Journal of Highway and
Transport, 2017, 30 (11): 138-146.
Zhao Chunchang, Wen Chengwei, Zheng Hui. Linear
optimization based on driving safety and unmanned
driving [J]. Gansu Science and Technology, 2019 (11):
13-16.
Research on Path Tracking Control of Unmanned Vehicles based on Vision
69
