
Research on the Application of Reverse Technology in Traffic
Accident Treatment
Li Feng
1, 2, a, *
, Fei He
2
, Jiaxin Wang
2
and Guizhi Zhang
2
1
Liaoning Key Laboratory of Information Physics Fusion and Intelligent Manufacturing for Grade CNC Machine,
Shenyang Institute of Technology, Fushun 113122, China
2
School of Mechanical Engineering and Automation, Shenyang Institute of Technology, Fushun 113122, China
Keywords: Reverse technology, traffic accident treatment, traffic survey, laser scanner.
Abstract: In recent years, frequent traffic accidents have led to the decline or even interruption of traffic capacity, which
has brought huge economic and life and property losses to the society, which has higher requirements for
traffic survey. It is found that the traffic jams will be reduced by about 5 minutes every 1 minute fast in dealing
with traffic accidents, thus indirectly reducing economic losses. Therefore, using advanced technology to deal
with the traffic accident scene quickly is of great significance to solve the problems in traffic accident scene
investigation. In this paper, how to quickly and effectively explore the scene of major traffic accidents is the
goal. On the premise of accurate investigation and proper disposal of traffic accidents, reverse technology is
introduced to restore the scene of traffic accidents.
1 RESEARCH SIGNIFICANCE
Traffic accidents are imbalances caused by roads,
vehicles and people in the designated environment,
and the impact is a global public safety problem.
According to the report on the current situation of
global road safety 2018, road traffic accidents cause
about 1.35 million deaths every year in the world, and
it is expected that by 2030, traffic accidents will rise
to become the fifth largest cause of death in the world.
During the same period the number of vehicles
worldwide has steadily increased, while death rates
declined from 135 deaths for every 100,000 vehicles
in 2000 to approximately 64 deaths for every 100,000
vehicles in 2016 (Figure 2). This represents a
reduction of more than 50% in the last 15 years
suggesting some progress in mitigating the adverse
effects of increasing motorized transport. Although
progress has been made, these data show that it has
not occurred at a pace fast enough to compensate for
rapid population growth and increasing motorization
worldwide. (Global status report on road safety 2018)
Figure 1: Number of motor vehicles and rate of road traffic death per 100,000 vehicles: 2000–2016.
12
Feng, L., He, F., Wang, J. and Zhang, G.
Research on the Application of Reverse Technology in Traffic Accident Treatment.
DOI: 10.5220/0010003000120016
In Proceedings of the International Symposium on Frontiers of Intelligent Transport System (FITS 2020), pages 12-16
ISBN: 978-989-758-465-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Statistics of road traffic accidents in China from 2011 to 2016.
Particular
year
Number of accidents
(Times)
Number of injured
(Person)
Death toll
(Person)
Direct economic loss
(RMB 100 million)
Death rate per 10000
vehicles (%)
2011 210812 237421 62387 10.78 2.80
2012 204196 224327 59997 11.70 2.50
2013 198394 213724 58539 10.38 2.30
2014 196812 211882 58523 10.75 2.22
2015 187781 199880 58022 10.37 2.08
2016 212846 226430 63093 12.10 2.14
The economic losses caused by road traffic
accidents account for 1% - 3% of the world's GDP
every year, about 518 billion US dollars. According
to the statistics of national economic and social
development in 2016 by the National Bureau of
statistics of China, the number of civil vehicles in
China reached 185.7million, including 28.1million
private vehicles. With the rapid growth of China's
civil vehicle ownership, the number of drivers is also
growing significantly, with an average annual growth
rate of 12.42% between 2007 and 2016. By the end of
2016, the number of motor vehicle drivers in China
has reached 303 million. According to the analysis of
relevant data by the traffic police department, drivers
with driving age less than 3 years have the most traffic
accidents, accounting for 39% of the total number of
accidents (Qiang Chen, 2017).
The increase in vehicle ownership and the
relatively weak safety awareness of drivers have led
to a increase in the number of traffic accidents in
China. According to the road traffic safety
development report (2017), in 2016, there were 8.643
million road traffic accidents in China, an increase of
659 thousand on a year-on-year basis. Among them,
there were 212846 road traffic accidents involving
casualties, 226430 injuries, 63093 deaths and 1.21
billion RMB of direct property losses (Ministry of
transport, 2017). In 2016, the death rate caused by
traffic accidents was 2.14, 2.9% higher than that in
2015. The statistics of road traffic accidents in China
from 2011 to 2016 are shown in Table 1.
If the traffic accident is not handled in time, it will
easily lead to chain reaction, resulting in more
economic losses and adverse social impact. The
losses mainly include the cost of treatment,
rehabilitation, rehabilitation, work delay, on-site
rescue, traffic jam, insurance and other costs.
Therefore, it is necessary to use advanced technology
to deal with the traffic accident scene quickly.
Research shows that every 1 minute fast in dealing
with traffic accidents, traffic jams will be reduced by
about 5 minutes, thus reducing economic losses
(Lidong Tan, 2009).
2 RESEARCH METHODS
The main method of this paper is to use the reverse
technology to obtain the three-dimensional point
cloud of the traffic accident scene in a short time,
record all the information of the accident scene
completely, so as to deal with the traffic accident
quickly and reduce the traffic jam time.
In this paper, taking the UAV as a platform,
equipped with a three-dimensional laser scanner used
in reverse technology to record the scene information
of traffic accidents. According to the statistical data
at home and abroad, the traffic accident rate at night
is 2-3 times larger than that in the day, and the
principle of the full-color laser scanner itself
determines that it must work in the day with sufficient
light, so in order to improve the data accuracy, this
paper adopts the modeling method of laser scanner +
tilt image, and then after the post-processing, the
traffic accident scene model data is output. The three-
dimensional model can also be used for later accident
analysis or as a kind of evidence.
2.1 Information Collection Technology
of Accident Site
The basis of reverse technology is to obtain high-
precision data, and the three-dimensional laser
scanning technology and artificial intelligence
algorithm developed in recent years is such a new
technology, which can quickly and accurately obtain
the three-dimensional data model of the object.
2.1.1 Introduction of 3D Laser Scanning
Technology
3D laser scanning technology is a kind of technology
developed from surveying and mapping technology.
It has the advantages of high precision and high
efficiency. It can give precise coordinates for points
in space. Such technical products mainly include
CMM, total station and laser tracker. The 3D laser
Research on the Application of Reverse Technology in Traffic Accident Treatment
13
scanner records the 3D coordinates of the whole or
part of a given target.
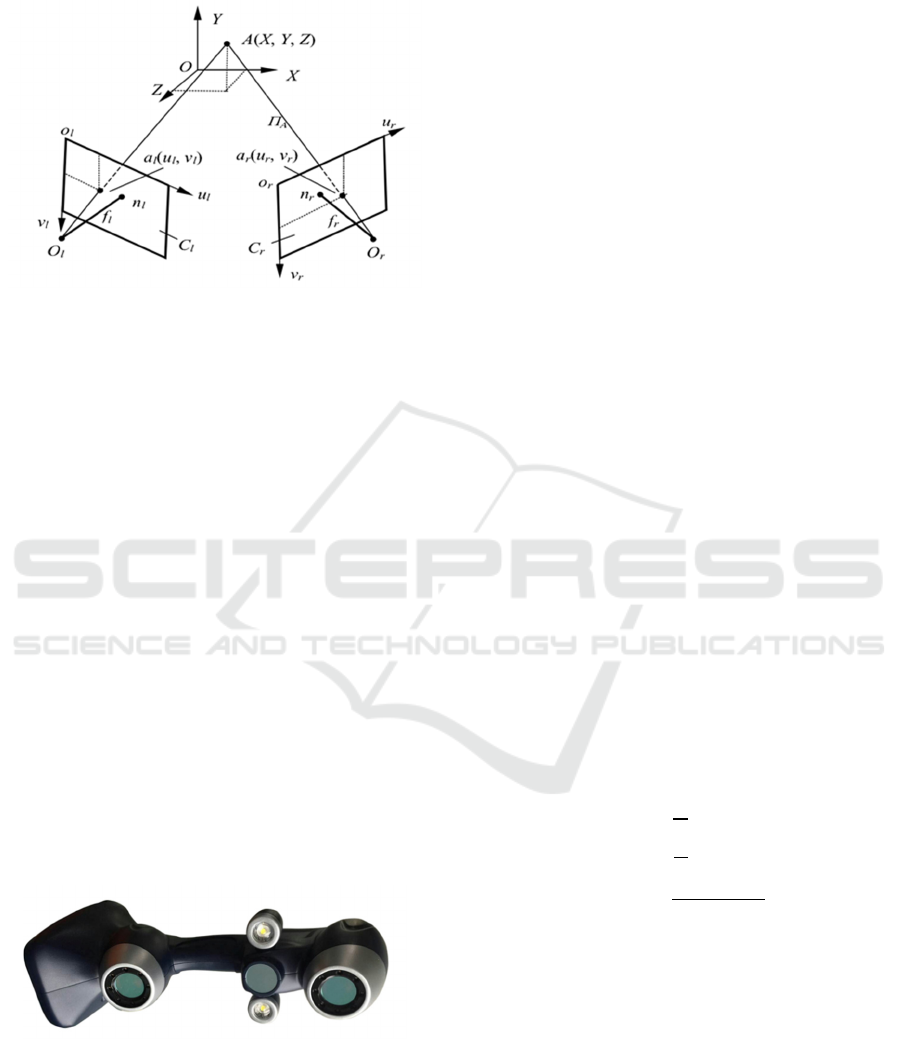
Figure 2: Schematic diagram of laser scanner.
The principle of 3D laser scanner is to send
infrared beam to the center of rotating lens through
the front end, rotate the laser around the detection
environment, once it contacts the measured object,
the beam will be reflected back to the scanner, and
then calculate the rotation angle and horizontal angle
of laser by computer according to the change of
infrared position, so as to obtain the X, Y, Z
coordinates of point A (Housheng Huang, 2014). The
calculation method is shown in Fig. 2, and the
corresponding parameters of left and right cameras
are marked with l and r respectively. The image
points of point A (X, Y, Z) in the three-dimensional
space on the image plane
and
of the left and right
cameras are
(
,
) and
(
,
), respectively.
These two image points are called "conjugate points".
They are respectively connected with the optical
centers
and
of their respective cameras, that is
the projection lines
and
, and their
intersection points are obtained to obtain the
coordinates of the object points A (X, Y, Z) in the
three-dimensional coordinate system. One type of
laser scanner is shown in Figure 3.
Figure 3: A type of laser scanner.
Suppose that the coordinates of the two CCD
cameras are
,
, respectively; the
focal lengths of the two CCD cameras are fl,fr,
respectively. The coordinates of the measured object
point P in the measurement coordinate system of the
CCD cameras are
,,
,
,
,
, and the
relationship between them can be expressed as
follows:
1
1
(1)
In Formula 1, M
lr
is the space conversion matrix,
R is the rotation matrix, indicating the rotation
relationship of two CCD camera coordinate systems;
T is the translation transformation, indicating the
translation relationship of two CCD camera
coordinate systems. Among them:
r
r
,
t
t
(2)
The coordinates of the space measured point and
the corresponding point in the CCD camera
coordinate system are
,,
and
,
,
,
respectively. The relationship between them can be
expressed as homogeneous coordinates:
(3)
Where ρ is the scale factor (ρ is not 0). The spatial
three-dimensional coordinates of the surface points of
the measured target can be obtained by combining
formula (1) and formula (3):
(4)
Where,
.
After obtaining the three-dimensional coordinates
of the spatial target points, various three-dimensional
measurement tasks can be completed. These are the
basic principles of laser scanners. In the actual
measurement, the main factors that affect the
measurement accuracy are: calibration error,
matching error, and camera optical system error.
FITS 2020 - International Symposium on Frontiers of Intelligent Transport System
14
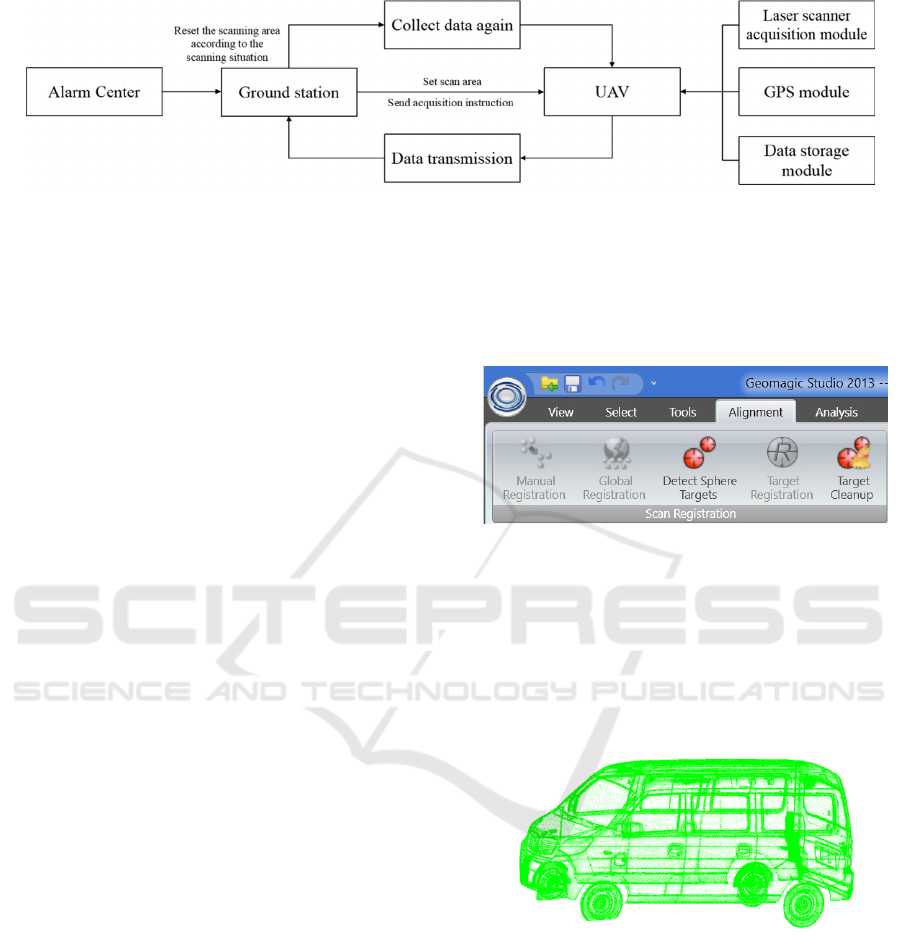
Figure 4: Data acquisition flow chart of UAV.
2.1.2 The Data Collection Process of UAV
After receiving the alarm, the UAV will arrive at the
scene of the traffic accident according to the GPS
positioning and send back the scene image, and then
manually set the scanning area and scanning route to
ensure that there is a certain overlap rate in the
scanning process, which is generally set to 35%, and
the heading overlap rate is 60%. The UAV will scan
the root set area independently, and the scanned data
will be sent back to the base station in real time
through the network. Figure 4 shows the data
acquisition flow chart of UAV.
The UAV sends the data back to the ground
station in sections for data splicing, which can not
only effectively prevent data loss, but also save time.
After the collection, the manual data verification shall
be carried out, and the unqualified area shall be
supplemented until the qualified data is scanned.
2.2
Processing of Traffic Accident
Scanning Data
2.2.1 Introduction of Geomagic Software
Geomagic ® software is a professional engineering
software brand under 3D systems c®. Geomagic
software is used for computer-aided design, focusing
on 3D scanning and other non-traditional design
methods, such as tactile input modeling based on
point cloud. Geomagic wrap software, formerly
known as Geomagic studio, is a professional reverse
software developed by Geomagic company in the
United States. It has advanced algorithm and surface
construction capabilities, and can quickly organize
point cloud data, automatically generate meshes, and
construct complex and accurate digital models. The
re grid function of Geomagic wrap software can
generate the disordered scanning data into regular
polygon mesh data, and also can adjust the mesh
surface accurately (Hongming Wang, 2015).
2.2.2 Data Processing
The Geomagic wrap (Geomagic studio) software
splices data through a variety of commands, and the
operation interface is shown in the figure below.
Figure 5: Data splicing operation interface.
After the global registration command dialog box
pops up, set the software, click the "application"
command to splice all point clouds, and then click the
"OK" command to exit the current dialog box and
enter the "point" menu. Use the merge option on the
points menu to merge the aligned point clouds into a
single point cloud.
Figure 6: Data splicing results.
The final data can be obtained through a series of
processing steps, such as point cloud sampling, noise
removal, encapsulation, and deletion of spikes, which
can be used for later use.
2.2.3 Using Tilt Photography to Make Up
for Missing Data
The tilt photogrammetry technology of UAV can
improve the modeling efficiency of 3D model. Using
UAV tilt photography technology, it takes only three
Research on the Application of Reverse Technology in Traffic Accident Treatment
15

to five months to complete the scanning task which
needs one or two years to complete manually, which
reduces the time of obtaining 3D model data and
saves manpower.
The 3D model obtained by ordinary laser scanner
does not have color after processing, which makes it
inconvenient to observe, and the model will have
some holes, overlaps or gaps, so it is necessary to
synthesize a complete 3D model with the help of
photographic image. If we use the full color laser
scanner, we can get the color data directly, but there
are still holes in the data. The existing UAV tilt
photography technology only needs to set the ground
coordinate point (or even no ground coordinate point)
for positioning, then it can quickly obtain high-
precision 3D scene and build a digital model. This
technology is widely used in 3D model acquisition.
UAV tilt photography technology first uses UAV
to obtain all images, and then transmits the images to
the computer for relevant option settings. After
setting the output format, grid quality and other
operations, the renderings as shown in Figure 7 are
obtained.
Figure 7: Final renderings.
3 APPLICATION OF DATA IN
TRAFFIC ACCIDENTS
Using reverse technology to get the three-
dimensional model of traffic accident scene is a new
method to deal with traffic accidents, and also an
important step to shorten the time of dealing with
traffic accidents. Some studies show that the use of
the new method can reduce the time of investigating
accident scene to one-fifth of the original, and the
time of later investigation to about one-third of the
original.
In general, the data from section 2 can be used to
create scenes and measure the relative positions of
objects. Law enforcement officers can measure the
distances and angles needed on the digital model as
an effective basis to determine the cause of the
accidents.
4 ADVANTAGES OF UAV IN
COLLECTING TRAFFIC
ACCIDENT DATA
When a traffic accident occurs, the scene of the
accident should be cleaned up as soon as possible to
reduce economic losses, but the scene data of the
traffic accident must be recorded first, which brings
great pressure to the traffic police department. Using
UAV in traffic accident reconstruction can record the
scene data of traffic accident quickly and accurately,
so this technology has great potential in law
enforcement (Hongming Wang, 2015).
At present, emergency personnel often use laser
scanner, total station or photography to record traffic
accident data, or use them together to collect field
data and generate three-dimensional point cloud.
However, it is necessary to close the road or reduce
the traffic flow to record the scene of the traffic
accident; in some cases, there may be a second
accident, which will threaten the life safety of the first
responders, police and firefighters. For the above
situations, the use of UAV in the scene of traffic
accident treatment came into being. UAV can record
the scene of accident quickly and accurately, which is
an ideal choice for lack of manpower or equipment
limitation, and has less risk. UAV can easily cover a
wider range of accidents. The larger the accident area,
the more efficient the UAV data collection. Drew
jurkofsky, an expert in traffic accident reconstruction,
has found that the time used by UAV to record traffic
accidents is about one fifth of the time used by
traditional methods.
REFERENCES
Global status report on road safety 2018 [EB/OL]. [2019-
11-03]. https://apps.who.int / iris/ bitstream/ handle/
10665/ 276462/9789241565684-eng.pdf.
Hongming Wang. Road traffic accident treatment [M].
People's traffic press, 2015.
Housheng Huang. Research on the application of ground
3D laser scanning technology in cultural relics
protection [D]. Chang'an University, 2014.
Lidong Tan. Research on image information processing
technology for rapid investigation of road traffic
accident scene [D]. Jilin University, 2009.
Ministry of transport. 2016 Development Statistics Bulletin
of transportation industry [J]. Transportation finance
and accounting, 2017 (5),92-96.
Qiang Chen. Research on traffic accident scene survey
technology based on real and virtual target fusion and
UAV photography [D]. 2017.
FITS 2020 - International Symposium on Frontiers of Intelligent Transport System
16
