Ontological and Machine Learning Approaches for Managing
Driving Context in Intelligent Transportation
Manolo Dulva Hina
1
, Clement Thierry
1
, Assia Soukane
1
and Amar Ramdane-Cherif
2
1
ECE Paris School of Engineering, 37 quai de Grenelle, 75015 Paris, France
2
LISV Laboratory, Université de Versailles St-Quentin-en-Yvelines, 10-12 avenue de l’Europe, 78140 Velizy, France
Keywords: Internet of Things, Ontology, Machine Learning, Driving Context, Smart Vehicle, Cognitive Informatics.
Abstract: In this paper, a novel approach of managing driving context information in smart transportation is presented.
The driving context refers to the ensemble of parameters that make up the contexts of the environment, the
vehicle and the driver. To manage this rich information, knowledge representation using ontology is used and
through it, such information becomes a source of knowledge. When this context information (i.e. basically a
template or model) is instantiated with actual instances of objects, we can describe any kind of driving
situation. Furthermore, through ontological knowledge management, we can find the answers related to
various queries of the given driving situation. A smart vehicle is equipped with machine learning
functionalities that are capable of classifying any driving situation, and accord assistance to the driver or the
vehicle or both to avoid accident, when necessary. This work is a contribution to the ongoing research in safe
driving, and a specific application of using data from the internet of things.
1 INTRODUCTION
The World Health Organization’s statistics on global
traffic accident (WHO 2015) are gruesome:
• Every year, about 1.24 million people die each
year in road traffic accidents;
• Road traffic injury is the leading cause of death
on young people, aged 15–29 years;
• Half of those dying on the world’s roads are
“vulnerable road users”, namely the pedestrians,
cyclists and motorcyclists;
• In 2008, in the USA, old people accounted for
15% of all traffic fatalities and 18% of all
pedestrian fatalities; and
• If no remedy is employed, road traffic accidents
are predicted to result in the deaths of around 1.9
million people annually by 2020.
Here lies the importance of researches on
intelligent transportation intended to reduce traffic
accident, such as ours. An intelligent transportation
(An, Lee et al. 2011, Naja 2013) denotes advanced
application embodying intelligence to provide
innovative services related to modes of transport and
traffic management, enabling various users to be
better informed and makes safer, more coordinated,
and smarter use of transport networks.
Recently, the Internet of things (IoT) (Ashton
2009, Atzori, Iera et al. 2010), that is, the idea of
connecting all things in the world to the Internet, have
been integrated into vehicles in order that an
intelligent transport would be able to use them as
parameters to tools for safe driving, green driving and
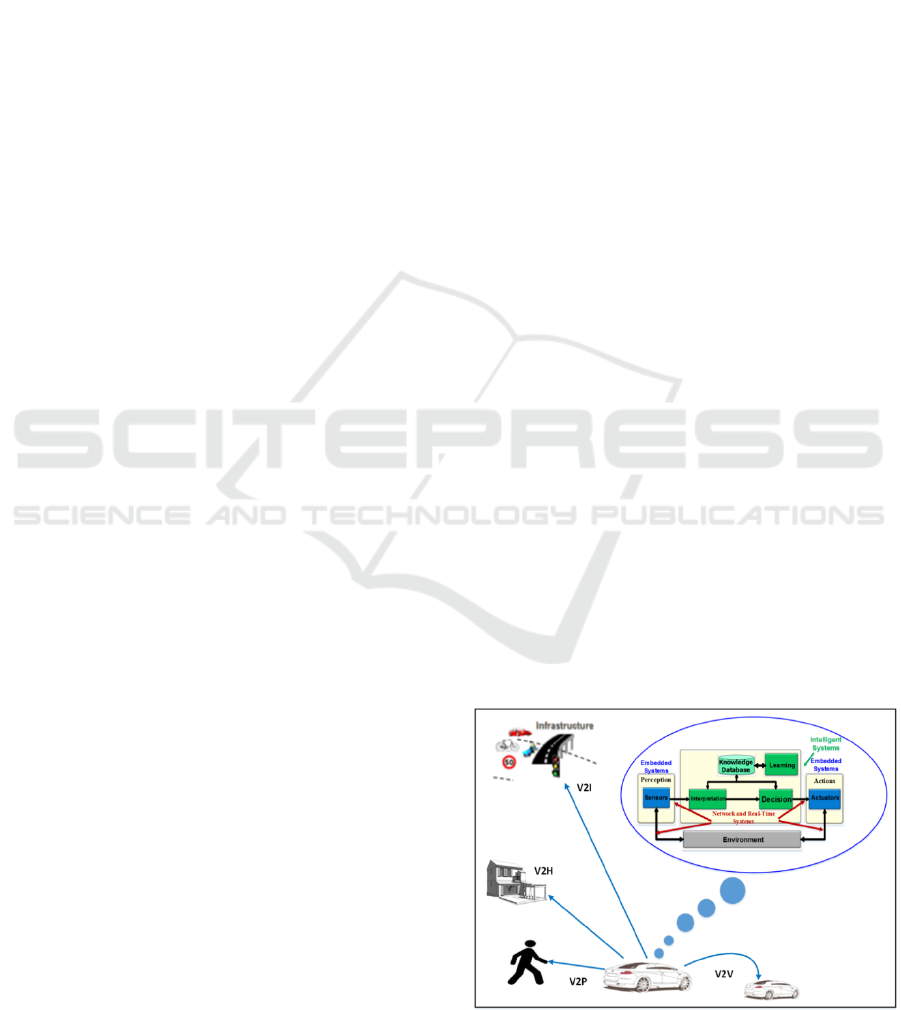
comfortable driving. Our vision of an innovative
vehicle is shown in Figure 1. Inside this vehicle is an
intelligent architecture with three main components:
(1) Embedded System, (2) Intelligent System, and (3)
Network and Real-time System.
Figure 1: Smart services for an intelligent vehicle.
Hina M., Thierry C., Soukane A. and Ramdane-Cherif A.
Ontological and Machine Learning Approaches for Managing Driving Context in Intelligent Transportation.
DOI: 10.5220/0006580803020309
In Proceedings of the 9th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (KEOD 2017), pages 302-309
ISBN: 978-989-758-272-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
The cloud computing infrastructure (Oracle 2009,
Yousif 2017) which has become the de-facto hosting
platform for all smart applications also hosts the
system.
In a smart vehicle, such vehicle is capable of the
following: V2V (vehicle-to-vehicle communication),
V2P (vehicle-to-person communication), V2I
(vehicle-to-infrastructure communication) and V2X
(where X represents practically anything such as
home, in which case V2X becomes V2H, i.e. the IoT
at home being able to communicate to the driver some
information, such as when it is running low on some
items on the refrigerator, for example).
2 RELATED WORKS
The Internet of Things (IoT) has been considered the
technology that will integrate classical networks and
networked objects (Miorandi, Sicari et al. 2012).
Through IoT, it is expected that things can be
identified automatically, can communicate with each
other, and out of this, we can make better decisions
for ourselves. One important question in this regard is
how do we convert the data generated or captured by
IoT into knowledge that we may be able to use for our
convenience? An important work pertinent to this
question is that of (Tsai, Lai et al. 2014). They
proposed knowledge discovery in databases (KDD)
and data mining technologies to find the information
hidden in the data of IoT. Recent researches do focus
on developing effective data mining technologies for
the IoT. The results described in (Bin, Yuan et al.
2010) show that data mining algorithms can be used
to make IoT more intelligent, thus providing smarter
services. Our Embedded System’s task is related to
this area. In the area of intelligent transportation, the
connected and autonomous vehicles are a
technological revolution, combining radical changes
in the design of road vehicles and in the
understanding of their interactions with the
networked infrastructure. The core science and
technology required to support cyber-physical
vehicles (Brioschi, Hina et al. 2016) are essential for
future economic competitiveness. This is where this
work lies. We intend to contribute to its advancement.
3 THE DRIVING MODEL
Ontology (Dice 2017) is the structure of concepts and
relations representing the meaning of a given domain.
In other words, ontology is a description of things that
exist and how they relate to each other (Obrst 2003).
Ontologies are partial and formal specifications of a
conceptualization. Ontologies are formal because
they are expressed as formalism with formal
semantics (Zhao, Ichse et al. 2015). Ontology is used
as knowledge representation in this work. For
visualization purposes, we use a Protégé plug-in,
VOWL (visual notation for OWL ontologies)
(VOWL) in order to describe the ontology
components. OWL ontology consists of individuals,
properties, and classes.
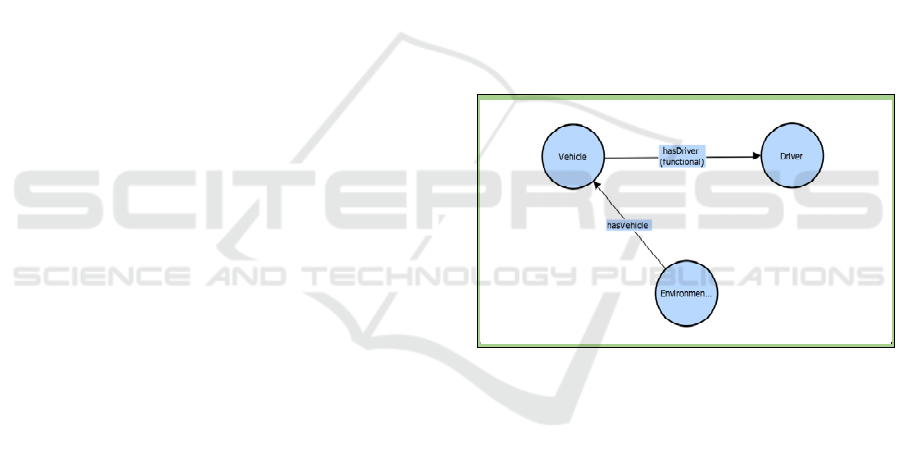
3.1 The Driving Context
The driving context is the representation of a
traffic/driving situation. Ontology is used for
modelling, putting in place a common conceptual
language between the driving situation and the
assistance system. Briefly, the driving context is the
result of the fusion of three main contexts: the vehicle
context, the driver context and the environment
context. It is depicted in Figure 2.
Figure 2: Ontological representation of the driving context.
As shown, the “Environment” is the class used to
describe the external environment where human-
vehicle interactions take place. The “Vehicle” is the
class that represents the vehicle in consideration,
interacting with its driver. The “Driver” is the class
that describes the driver of a simulated vehicle.
“Environment” and “Vehicle” are related through
hasVehicle object property while the “Vehicle” and
the “Driver” are related to each other through
hasDriver object property. This ontology is capable
of modeling all possible types of driving situations.
Through ontology, we can find answers to a query
related to a driving situation.
3.2 Modeling the Context of the Driver
The ontological representation of the context of the
driver is shown in Figure 3. The Driver class is related
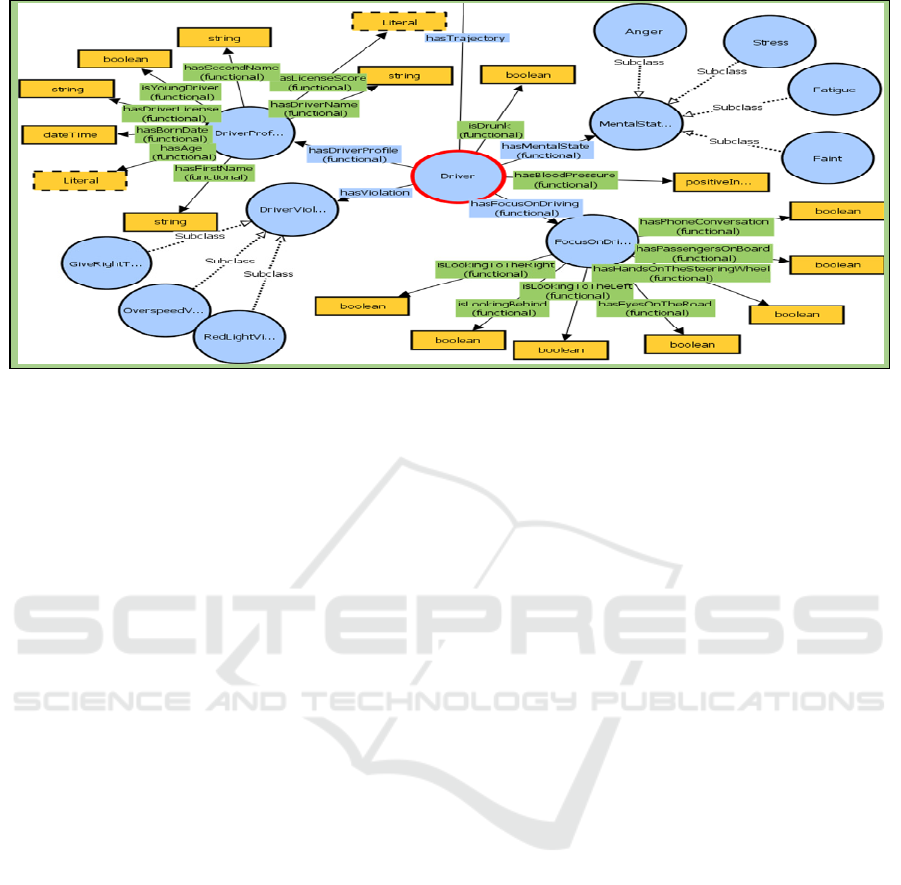
Figure 3: The ontological representation of the driver’s context.
to many other classes that describe the driver’s
context in the ontology, such as:
• DriverProfile: it is related to the “Driver”
through “hasDriverProfile” functional property.
• MentalState: describes the mental state that can
negatively influence the behavior of the driver
while driving a vehicle. It has three subclasses:
‘Fatigue’, ‘Stress’, and ‘Faint’. Each one has one
of these values: ‘High’, ‘Average’ or ‘Low’.
• FocusOnDriving: has data properties
‘hasEyesOnTheRoad’, ‘isLookingToTheRight’,
‘isLookingToTheLeft’, hasPhoneConversation,
‘hasHandsOnSteeringWheel’, etc.
• DriverViolation: The violations can be of type
‘GiveRightToPass’, ‘RedLightViolation’ and
‘OverSpeedViolation.
3.3 Modeling the Context of the
Vehicle
The class “Vehicle” is a subclass of MovingObject
template. As shown in Figure 4, the Vehicle class has
three subclasses: ‘Car’, ‘Truck/Bus’ or ‘MotorBike’.
A vehicle has some data properties, such as
‘hasPlateNumber’ and ‘hasInsurance’. The Vehicle
class is linked to other classes, such as:
• Cockpit: contains the status of all elements that
are found in a vehicle’s cockpit. For example,
‘hasWindowsOpen’ is a data property that has a
Boolean value;
• Components: contains all components that
guarantee a good driving experience. Among
these subclasses are “DirectionIndicator” (values
are ‘NoIndicator’ ‘RightIndicator’,
‘LeftIndicator’, and ‘DoubleIndicators’),
“TyresPression”, “LubricantTemperature”,
“EngineLubricantLevel” (‘Low’, ‘Half’ or ‘Full’),
and “FuelQuantity”. It also has some Boolean
properties indicating if some components are
active or not. Example is ‘hasFogLightsOn’;
• TechnicalData: it is made up of three subclasses,
namely “FuelType” (‘Petrol’, ‘Diesel’,
‘Electricity’ and ‘GPL’), “EmissionClass”
(‘euro0’, ‘euro1’, …, ‘euro6’) and
“TractionType” (‘Front-WheelDrive’, ‘Rear-
WheelDrive’, ‘All-WheelDrive
’);
• VehicleObject: this refers to the class of other
vehicles on the road and is related to our vehicle
via property “hasPossibleCollision”.
3.4 Modeling the Context of the
Environment
The Environment (see Figure 5) describes all the
entities that are present in the external setting where
the human-vehicle interaction takes place. Here, the
environment is an abstract class and general concept
made up of cities where vehicles, and moving and
non-moving objects are present. The classes related
to the Environment are given as follows:
• City: In this work, an Environment is an area or
region where we can find many cities. A city has
two data properties, namely ‘hasCityName’ and
‘hasLimitedTrafficZone’ which is a Boolean
value indicating if the city can be accessed only
during some intervals of the day;
• DistrictArea: contains different districts of a city.
The position of the “Driver” is stored in the
“PositionArea”, a subclass of “Physics” and
equivalent to “DistrictArea”;
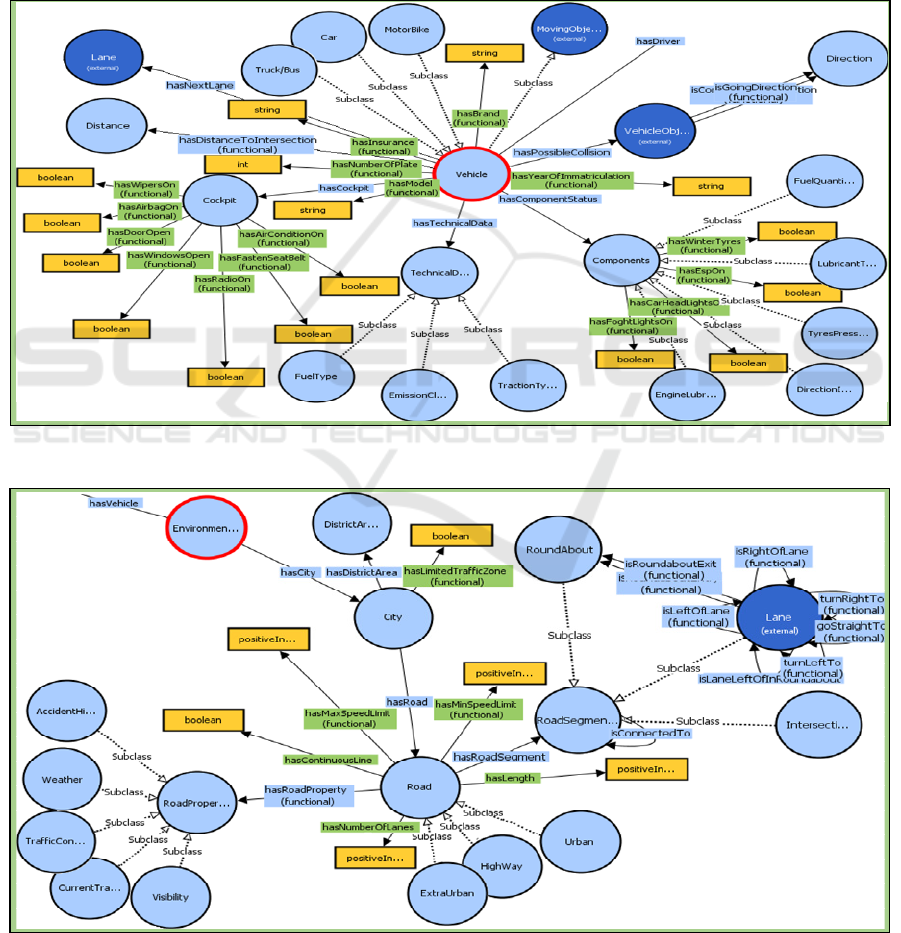
• Road: a road has many data properties, such as
‘hasMinSpeedLimit’, ‘hasMaxSpeedLimit’,
‘hasNumberOfLanes’, ‘hasContinuousLine’ and
‘hasLength’. A road is made up of three
subclasses: ‘Urban’, ‘ExtraUrban’, and
‘Highway’. Every subclass of a road has its
minimum and maximum speed limit;
• RoadProperty: it stores all the properties that
belong to a particular road. This includes
“Visibility” (‘Low’, ‘Average’ or ‘High’),
“Weather” (‘Fog’, ‘Sun’, ‘Rain’ and ‘Snow’),
“AccidentHistory” (‘Unusual’ or ‘Frequent’),
“TrafficCongestionHistory” (‘Low’, ‘Average’ or
‘Intense’) and “CurrentTrafficCongestion”
(‘Low’, ‘Average’ or ‘Intense’);
• Lane: represents different lanes of a road ;
• Position: contains the exact position of the
referenced object. It has two data value
properties: ‘hasLatitude’ and ‘hasLongitude;
• Time: it has data value properties, such as
‘hasDate’ and ‘hasTime’
Figure 4: The representation of the context of the vehicle.
Figure 5: The ontological representation of the context of the environment.

3.5 Multimodal Fusion and Fission
To determine the driving event, the context
parameters need to be fusioned. Multimodal fusion is
the process of combining two or more signals or
parameters obtained from two or more sensors (or
other sources such as IoT) using two or more
modalities. Once fusioned, the driving event is
interpreted at the higher-level of abstraction.
Machine learning training sets (i.e. supervised
learning) are created so that the driving event in
consideration can be easily predicted. The fusioned
information is searched/matched on the knowledge
database to determine if a pattern to the new situation
is found. If so, then such situation has a meaning to
the system and a corresponding action needs to be
implemented.
Consider, for example, the fusion of the following
data. It represents a typical driving situation. The
notation of the rules in the fusion of context
parameters below is that of SWRL (Semantic Web
Rule Language) (Subercaze Julien , W3C). Note that
the symbol ‘?’ below represents an instance or
individuals of classes in our ontology:
• Let vehicle X be an individual of class “Vehicle”
== Vehicle (?X)
• Let Y be the individual of class ‘Road’ ==
Road(?Y)
• Let vehicle X be on Road Y == isOnTheRoad(?X,
?Y)
• Let Z an individual of class ‘Lane’ on Road Y ==
hasLane(?Y, ?Z)
• Let vehicle X be currently located on lane Y ==
isOnLane(?X, ?Z)
• Let W be an individual of class Object be located
on lane Z == hasObject(?Z, ?W)
• Let the distance of object W (after calculation)
from vehicle X be near ==
hasDistanceFromVehicle(?, nearDistance)
If we fusion the parameters and using our SWRL
rules, we will end up concluding that object W is an
obstacle relative to vehicle X. That is, logically:
ℎ
(
?
)
(
?
)
ℎ
(
?,?
)
ℎ
(
?,?
)
ℎ
(
?,?
)
ℎ
(
?,?
)
ℎℎ
(
?,
)
(? )
Multimodal fission is the necessary action to the
given driving situation. Given that we have an
obstacle, the fission yields an action corresponding to
avoiding the obstacle. The action itself is composed
of sub-actions. For example, there are various steps to
avoid an obstacle.
3.6 Assistance for the Driver and the
Vehicle
The actions for different driving situations are
implemented as ontology. The ontological class
“Action” is the overall class that will be instantiated
depending on the driving situation at hand. The class
“Action” has two sub-classes, DriverAction and
VehicleAction directed towards the driver and
vehicle, respectively. In the VehicleAction, we see
subclasses: Call_Emergency, Turn_Light_On and
Adjust_Airconditioner. For the class DriverAction,
the subclasses are as follows:
• ChangeLane: is an action to change lane to avoid
an obstacle located on the same lane and that there
is a free lane where the vehicle can go.
• RemainInTheSameLane: invoked when there is an
obstacle but there is no free lane available where
the vehicle can go.
• Brake: invoked when braking is necessary. This
class has the following sub-classes, describing the
situation when to brake: (1) BrakeForPedestrian –
here, the pedestrian is an obstacle and the vehicle
needs to brake to allow the pedestrian to cross the
street; (2) BrakeForObstacle – this is invoked
when the obstacle is on the same lane that is not
moving or when the obstacle is a another vehicle
whose speed is lower than the speed of the vehicle;
(3) BrakeForRedLight – this is invoked when the
system detects that there is a ‘TrafficLight’ object
in the scenario and its value is ‘Red’, or ‘Yellow’
and the distance of the vehicle and TrafficLight
object is near (the colour will shift from yellow to
red in a short while)
• SlowDown: this is invoked when the driver is
overspeeding
• HaveABreak: invoked when the driver is tired,
stressed or going to have malaise.
• BadWeather: informs the driver that weather has
changed due to the presence of rain, snow or fog
on the road.
• AdvanceCarefully: informs the driver to continue
driving slowly.
• ReleaseAccelerator: this is related to slowing
down as it is related to demanding driver to release
foot from accelerator to reduce gas consumption
(i.e. applicable when driving from a road segment
with higher speed limit to a road segment of
0lower speed limit). This is part of our work
related to the green driving.
3.7 Machine Learning
Machine Learning algorithms (Mitchell 1997) use
data to discover pattern and can be used to predict an
output from a formatted input after training the
algorithm on a sufficiently big set of training data
(Tchankue, Weeson et al. 2013). To begin with, a
driving trip from point A to point B is a repetition of
basic driving events: go straight, turn left, turn right,
stop, slow down, go roundabout, and avoid obstacle
(where obstacle may be a moving object – a vehicle,
a pedestrian, a bicycle – or a non-moving object). In
this work, we make use of supervised learning to
classify common driving situations (e.g. stop, turn to
the left, turn to the right, over speeding, etc.) and
unsupervised learning to classify driving situations
that are the combinations of two or more common
driving situations (e.g. driver to turn to the left and
pedestrian is crossing the street). When a driving
event is detected, an assistance action may be
invoked. In such a case, we make use of optimization
and reinforcement learning. The intent is to do
assistance for the driving situation and integrate these
aspects into the action: safe, green and comfortable
driving.
4 RESULTS AND DISCUSSION
4.1 Methodology
We created a driving simulator using Unity 3D
software (Engine 2016) to mimic driving scenarios in
the laboratory. As one drives, the data from the
driving event are sent to the ontology template as a
JSON data. These data instantiate various classes and
objects in the ontology. The result is an actual driving
event.
The ontology becomes an actual description of the
driving event. The event needs to be classified so it is
fed as input to the machine learning classifier. The
process yields an identification of a driving event. For
now, the driving events are basic ones: stop, turn left,
turn right, and normal driving. These are
representative samples of all other driving events.
Why only a limited driving events? The logic is
simple: if this works fine with the representative
samples, then it will work fine in all other driving
events. Using driving rules in SWRL, we can identify
if there is an infraction committed or if there is a need
for driving assistance intervention. If such is the case,
a driving assistance message will be sent to the driver.
If there is a need to intervene for the vehicle (e.g. turn
on the fog light), a signal will be sent to the vehicle.
This signal will be used to implement an action for
the vehicle. The driver then continues driving as he
wishes.
4.2 Simulation, Data Analysis and
Processing
In the simulation experiments, the aim is to detect the
driving event. To do so, parameters that describe the
context of the vehicle are needed. We collected all
data that are near our vehicle (parameters for the
context of the environment). We also pre-defined the
context of our driver (i.e. we are the driver). These
objects need to be identified for the purpose of
classification using machine-learning algorithms. We
record road objects (e.g. pedestrian, traffic signs,
other vehicles) detected by the car. The class
“RoadObject” is a template for this purpose. A
RoadObject has the following properties: (i) type (e.g.
stop, pedestrian, vehicle, etc.), (ii) speed, (iii)
acceleration (iv) distance (i.e. distance of this object
from us), (v) position, (vi) lane and (vi) weight. The
RoadObjects are stored in the JSON format.
To collect data, multiple test drives were
conducted for each common driving event. As it is to
be used as training set for machine learning
algorithms, we collected 1699 driving state; the
repartition of each driving event is shown in Table 1
This is a representative sample of the basic and
preliminary driving events conducted in the lab.
Table 1: Representative sample driving events.
Driving event Number of event Percentage of
event
Normal 1138 66.98%
Stop 257 15.12%
Turn left 162 9.53%
Turn right 142 8.35%
Machine learning algorithms require formatted
data (generally numeric) and a fixed number of
columns. For instance, we used one hot encoding for
the categorical data, like the position on lane. The last
step in data processing is tagging the data. We used
the simple tool in Python, the IDE Jupyter Notebook.
4.3 Decision Tree and K-Nearest
Neighbor
Decision tree learning uses a decision tree as a
predictive model. A decision tree is a flowchart-like
structure in which each internal node represent a
“test” on an attribute, each branch representing the
outcome of the test while each leaf representing a

class label for classification tree. A tree can be created
by splitting the training set into subset based on an
attribute value test and repeating the process until
each leaf of the tree contains a single class label or we
reach the desired maximum depth. There are multiple
criterion that can be used to divide a node into two
branch, such as the information gain which consist of
finding the split that would give the biggest
information gain, based on the entropy from the
information theory (Witten, Frank et al. 2011).
The k-nearest neighbor algorithm, on the other
hand, is a simple algorithm which consists of
selecting for an instance of data the k-nearest other
instances and assigning to the first instance the most
frequent label in the k instance selected. The value of
k is user defined. The distance can be computed in
different ways, such as the Euclidian distance for
continuous variables like ours. The importance of
each neighbor can be weighted; often the weight used
is inversely proportional to the distance to give more
importance to closer neighbor.
4.4 K-Fold Cross Validation and
Machine Learning Classification
Results
Validation measures how a predictive model will
perform after generalization on an independent data
set. It is useful to know the viability of a model and
to avoid overfitting problem, i.e. fitting the model too
closely to the training set, after that, it gets very good
results on it but bugs will perform poorly on other
data set. The cross validation is a technique used to
validate a predictive model. It consist of splitting the
original data set into a validation set and a training
set, training our model on the training set and
validating it on the validation set. We repeat the
operation multiple times with different splits and take
the average of the validation results to reduce
variability. The k-fold cross validation consists of
splitting the original data into k equal size sub-
samples. We then retain a sub-sample as the
validation set and use the k-1 other sub-samples to
train the model. The process is repeated k times, with
each of the k sub-sample used one time as the
validation data. Cross validation is commonly used
when the number of data is small and the usual
splitting into a training set and a validation set would
not be convenient. To validate a classification
problem like ours, we use our model to predict a
number of samples, and we then compare the number
of sample correctly tagged to the number of sample
incorrectly tagged, giving us the percentage of
correctly tagged data. Furthermore, confusion matrix
can be used to know where a classification algorithm
behaves poorly.
After processing and tagging our data,
experiments with machine learning algorithms were
made using scikit-learn library. We experimented
with decision tree and k-nearest-neighbor algorithms.
Results are validated using cross-validation with 10
folds, meaning that we have divided the dataset into
10 equal parts, and each time we trained it on 9 parts
and tested it on the tenth. The results are an average
precision of 95% for decision tree and a precision of
93% for the k-nearest neighbour algorithm. The
results indicate good results, although the number of
sample is quite low. We intend to test further with
other parameters for each algorithm to get better
results; we will also collect more data in different
situations.
4.5 Human-vehicle Interaction
Interface
This work is in evolution and available data is based
on laboratory experiments results. The HCI interface
shows messages intended for the driver. This
confirms that our machine learning classification
system is correct and that the SWRL driving rules are
correctly applicable to the detected driving events.
Our driving assistance system classifies messages as
one of the following: (1) Notification – a message to
inform the driver, and (2) Alert – this is a type of
message that attempts to get the driver’s attention. A
notification or alert is sent according to the category
of driving situation:
• Behaviour – this refers to the driver’s conduct of
driving. Example: over speeding;
• Danger – a potential risk to the driver or people
on the road exists; the driver’s behavior has
nothing to do with this. Example: Poor visibility
due to fog; and
• Ability – this concerns about the person’s ability
to drive. Example, the driver is falling asleep.
Given that two or more messages cannot be sent to
the driver at the same time, a priority scheme is
implemented, as follows:
• Alert has a higher priority than Notification;
• Ability has the highest priority, followed by
Danger and lastly by Behaviour.
5 CONCLUSION
In this paper, we have demonstrated our work on
intelligent transportation. This paper shows the

current status of our work on the ontological and
machine learning approach for managing driving
context. In the paper, we present the components of a
driving context using ontology, starting from the
context of the driver all the way to the context of the
environment. The driving context template is generic
such that all kinds of driving situations on the road
can be represented. We designed our own driving
scenario simulator and modeling various events but
sampling on the basic ones: turn left, turn right, stop,
etc. By simulation, we are able to instantiate objects
using real values. We use machine learning to classify
driving events. As the results show, event
classification using decision tree yields 95%
detection rate accuracy. More machine learning tests
and collection of sample training data are on the
agenda. Deep reinforcement learning (Phan, Dou et
al. 2015, Phan, Dou et al. 2017) will be invoked once
we are to perform the driving assistance actions for
some driving situations. Future works include
designing and implementing a cognitive user
interface component.
REFERENCES
An, S.-h., B.-H. Lee and D.-R. Shin (2011). A Survey of
Intelligent Transportation Systems. 3
rd
Intl Conference
on Computational Intelligence, Communication
Systems & Networks (CICSyN). Bali, Ind. pp. 332-337.
Ashton, K. (2009). "That ‘Internet of Things’ Thing."
from http://www.rfidjournal.com/article/print/4986.
Atzori, L., A. Iera and G. Morabito (2010). "The internet of
things: A survey." Computer Networks 54(15): 2787–
2805.
Bin, S., L. Yuan and W. Xiaoyi (2010). Research on data
mining models for the internet of things. Intl. Conf. on
Image Analysis and Signal Processing. pp. 127–132.
Brioschi, G., Hina, M. D., Soukane, A., Ramdane-Cherif,
A. and Colombetti, M. (2016). Techniques for
Cognition of Driving Context for Safe Driving
Application. ICCI*CC 2016, 15th IEEE Intl Conf. on
Cognitive Informatics and Cognitive Computing,
Stanford, CA.
Dice. (2017). "Ontologies." from https://www.dice.com/
skills/Ontologies.html.
Game Engine, G. (2016). "Unity 3D." from
https://unity3d.com/.
Gubbi, J., R. Buyya, S. Marusic and M. Palaniswami
(2013). "Internet of Things: A vision, architectural
elements and future directions." Elsevier Future
Generation Computer Systems 29(1): 1645-1660.
Miorandi, D., S. Sicari, F. D. Pellegrini and I. Chlamtac
(2012). "Internet of things: Vision, applications and
research challenges." Ad Hoc Networks 10(7): 1497–
1516.
Mitchell, T. (1997). Machine Learning, McGraw Hill.
Naja, R. (2013). A Survey of Communications for
Intelligent Transportation Systems. Wireless Vehicular
Networks for Car Collision Avoidance, Springer NY.
Obrst, L. (2003). Ontologies for Semantically Interoperable
Systems. 12
th
International Conference on Information
and Knowledge Management, New Orleans, LA, USA,
ACM Press, New York, USA.
Oracle. (2009). "Architectural Strategies for Cloud
Computing." from https://www.vanharen.net/Player/
eKnowledge/architectural_strategies_for_cloud_comp
uting.pdf.
World Health Organization WHO, (2015). "10 Facts on
Global Road Safety." from http://www.who.int/
features/factfiles/roadsafety/en/.
Phan, N., D. Dou, H. Wang, D. Kil and B. Piniewski (2015).
Ontology-based Deep Learning for Human Behavior
Prediction in Health Social Networks. 2015 ACM
International Conference on Bioinformatics,
Computational Biology and Health Informatics.
Atlanta, GA, USA.
Phan, N., D. Dou, H. Wang, D. Kil and B. Piniewski (2017).
"Ontology-based deep learning for human behavior
prediction with explanations in health social networks."
Information Sciences 384: 298-313.
Subercaze Julien, P. M. Semantic Agent Model for SWRL
Rule-based Agents. International Conference on
Agents and Artificial Intelligence (ICAART 2010),
Valencia, Spain, INSTICC Press.
Tchankue, P., J. Weeson and D. Vogts (2013). Using
machine learning to predict the driving context whist
driving. SAICSIT '13 South African Institute for
Computer Scientists and Information Technologists
Conference, East London, South Africa
Tsai, C.-W., C.-F. Lai, M.-C. Chiang and L. T. Yang
(2014). "Data Mining for Internet of Things: A Survey."
IEEE Communications Surveys & Tutorials 16(1).
VOWL. "Visual Notation for OWL Ontologies."
from http://vowl.visualdataweb.org/v2/.
W3C. "SWRL: A Semantic Web Rule Language Combining
OWL and RuleML." from https://www.w3.org/
Submission/SWRL/.
Witten, I., E. Frank and M. Hall (2011). Data Mining:
Practical Machine Learning Tools and Techniques.
Burlington, MA, Morgan Kaufmann.
Yousif, M. (2017). "The State of the Cloud." IEEE Cloud
Computing 4(1): 4 - 5.
Zhao, L., R. Ichse, S. Mita and Y. Sasaki (2015). Ontologies
for Driver Assistance Systems. 35th Semantic Web and
Ontology Workshop: 1 - 6.
